B25J — Манипуляторы; камеры, оборудованные манипуляторами
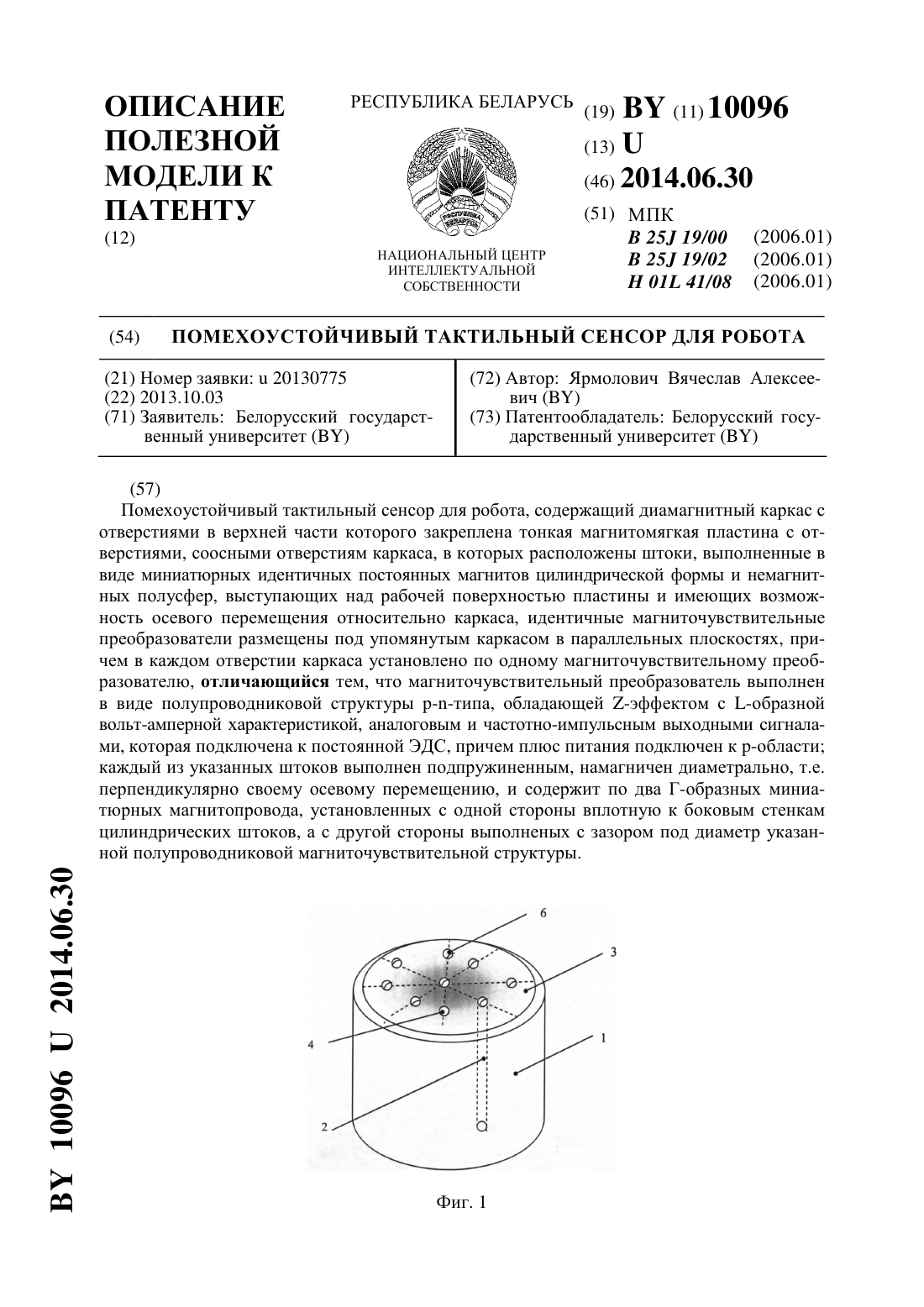
Помехоустойчивый тактильный сенсор для робота
Номер патента: U 10096
Опубликовано: 30.06.2014
Автор: Ярмолович Вячеслав Алексеевич
МПК: B25J 19/02, B25J 19/00, H01L 41/08...
Метки: робота, сенсор, помехоустойчивый, тактильный
Текст:
...цилиндрической формы и немагнитных полусфер, выступающих над рабочей поверхностью пластины и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи размещены под упомянутым каркасом в параллельных плоскостях,причем в каждом отверстии каркаса установлено по одному магниточувствительному преобразователю. Он отличается тем, что магниточувствительный преобразователь выполнен в виде...
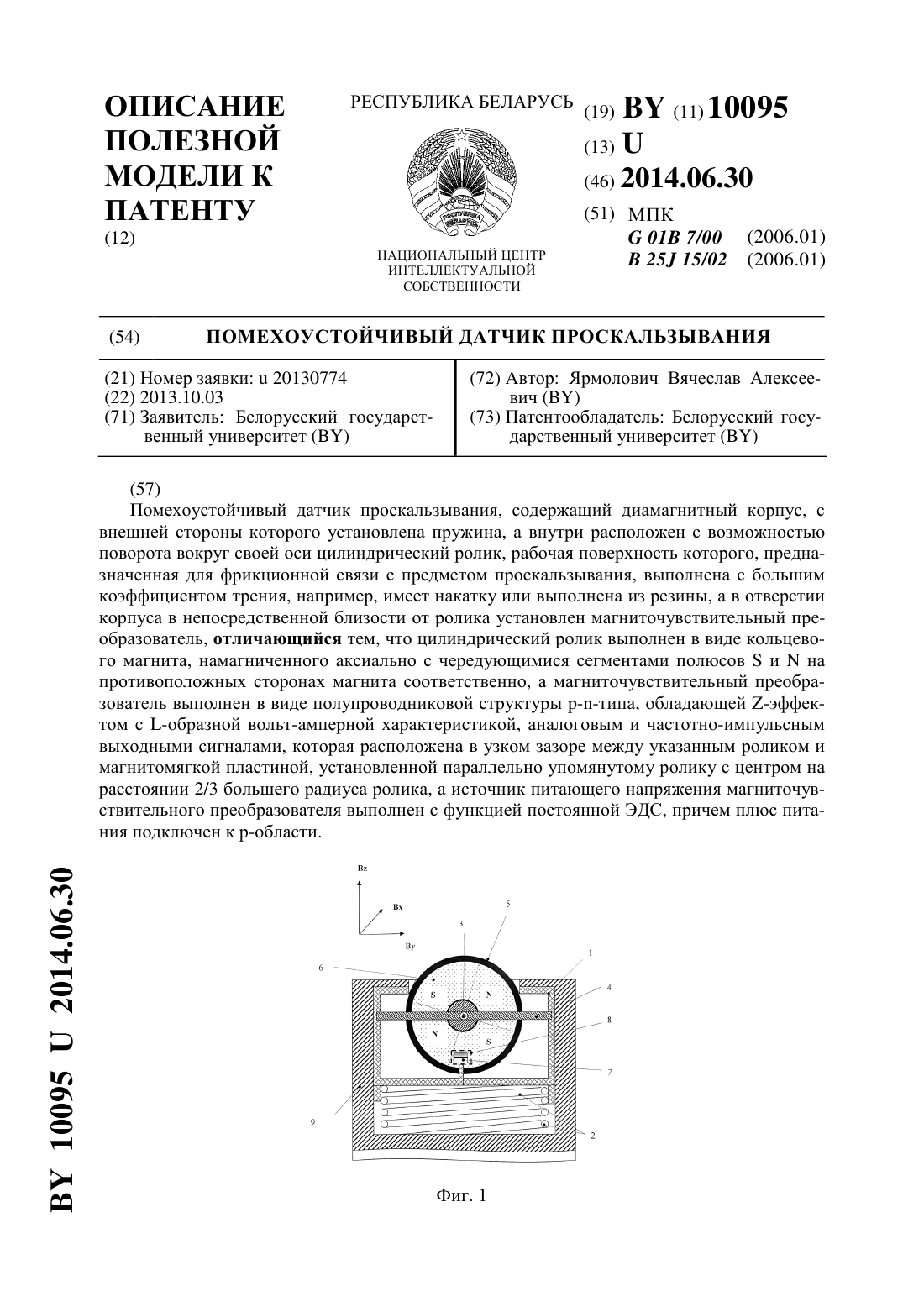
Помехоустойчивый датчик проскальзывания
Номер патента: U 10095
Опубликовано: 30.06.2014
Автор: Ярмолович Вячеслав Алексеевич
МПК: B25J 15/02, G01B 7/00
Метки: датчик, помехоустойчивый, проскальзывания
Текст:
...с функцией постоянной ЭДС, причем плюс питания подключен к -области. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению помехоустойчивости при одновременном снижении материалоемкости магнита. Решение поставленной комплексной задачи достигается следующими путями. В предложенном устройстве исключение из конструкции 2 магнита с...
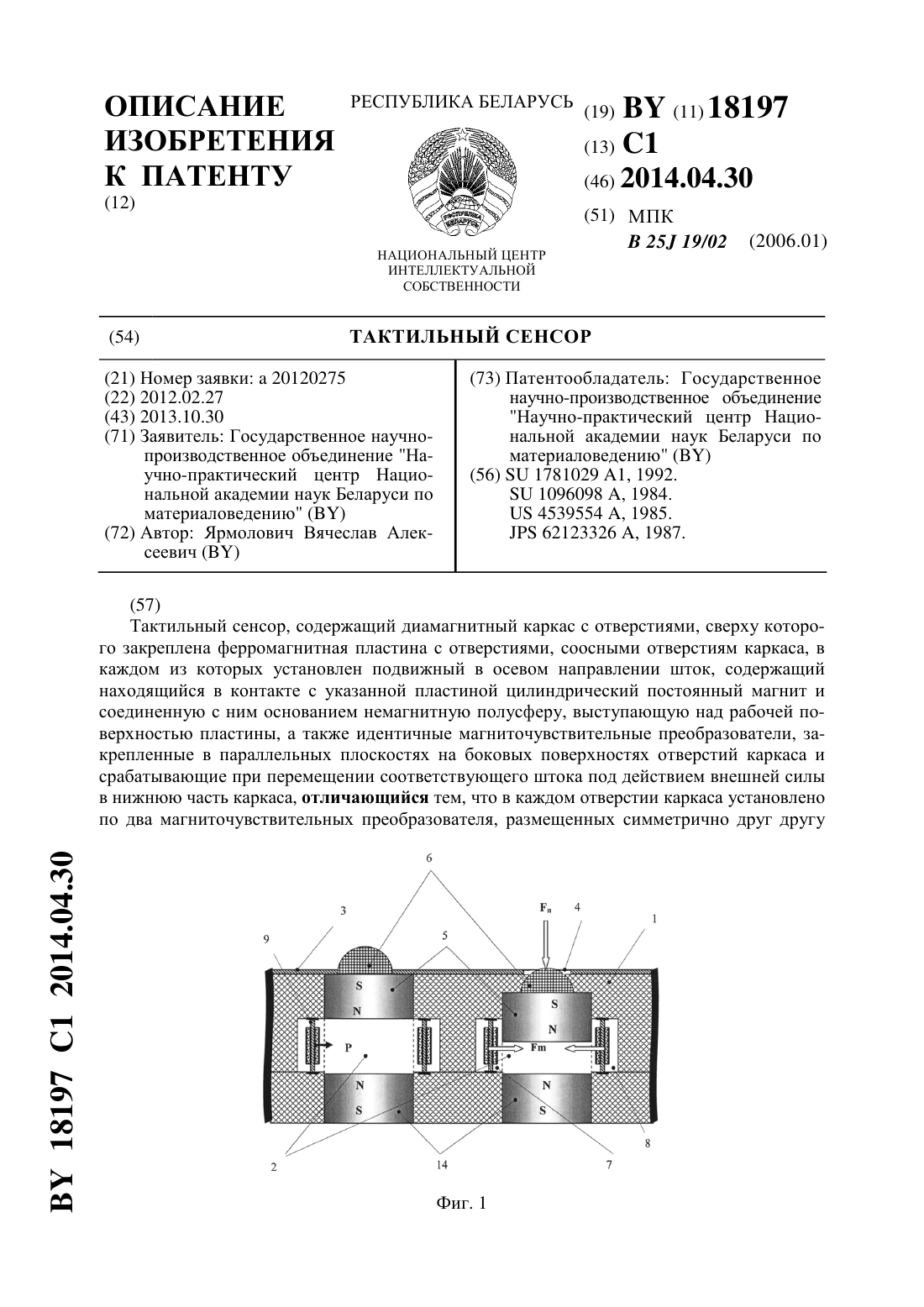
Тактильный сенсор
Номер патента: 18197
Опубликовано: 30.04.2014
Автор: Ярмолович Вячеслав Алексеевич
МПК: B25J 19/02
Метки: тактильный, сенсор
Текст:
...по толщине плоскими пьезоэлектриками равной длины и толщины и различной ширины, на каждый из торцов которых нанесен пленочный электрод, при этом каждая из указанных металлических пластин жестко скреплена с каркасом двумя противоположными торцами с возможностью прогиба в микрометровом диапазоне и соединена с ближайшими друг к другу электродами своего преобразователя, электроды другой пары которого электрически соединены друг с другом. По...
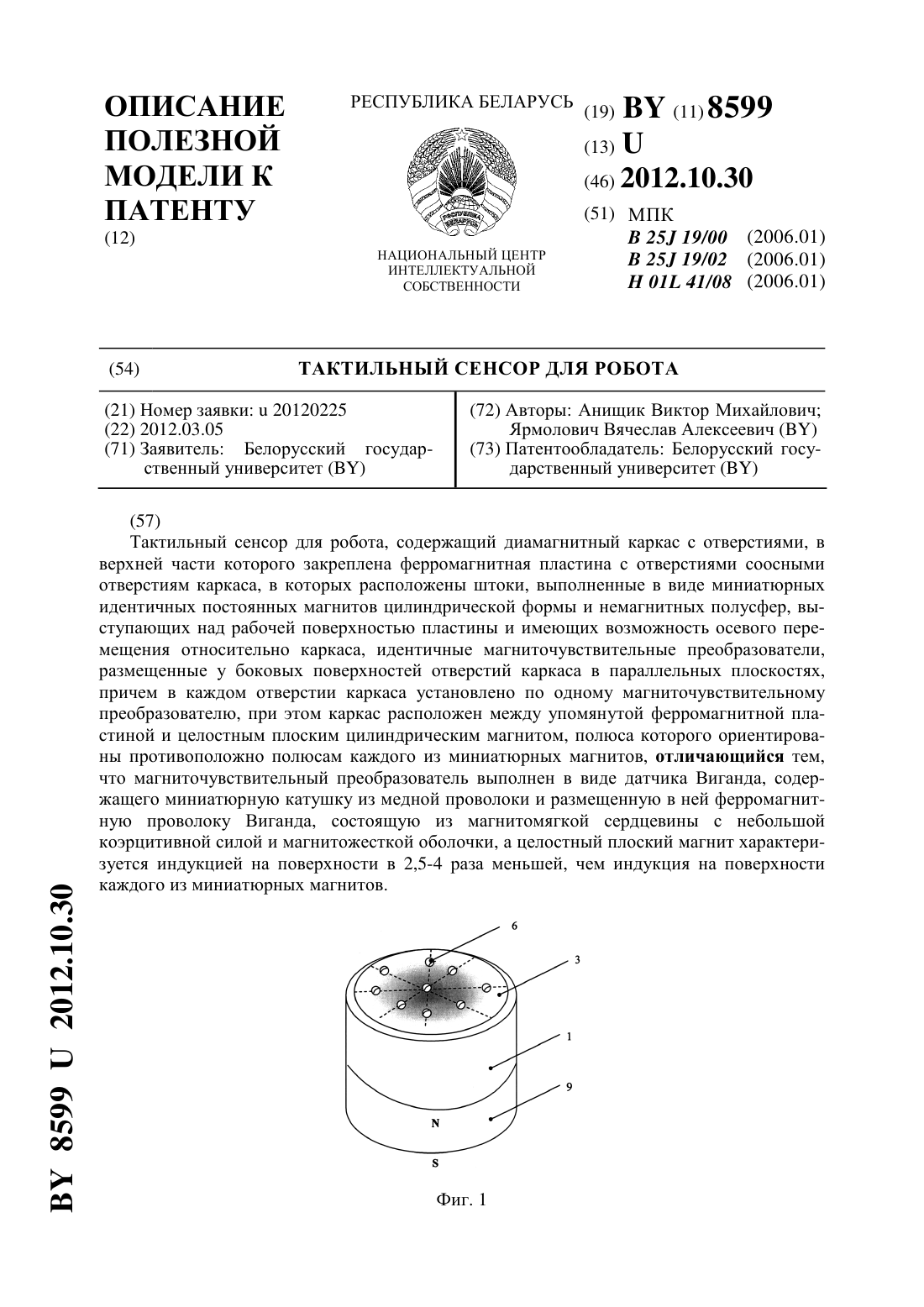
Тактильный сенсор для робота
Номер патента: U 8599
Опубликовано: 30.10.2012
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: B25J 19/02, H01L 41/08, B25J 19/00...
Метки: робота, тактильный, сенсор
Текст:
...на поверхности каждого из миниатюрных магнитов. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению надежности при одновременном исключении энергопотребления. Решение поставленной задачи достигается тем, что в предложенном устройстве магниточувтвительный преобразователь выполнен в виде датчика Виганда 3, и имеет значительно более...
Датчик проскальзывания
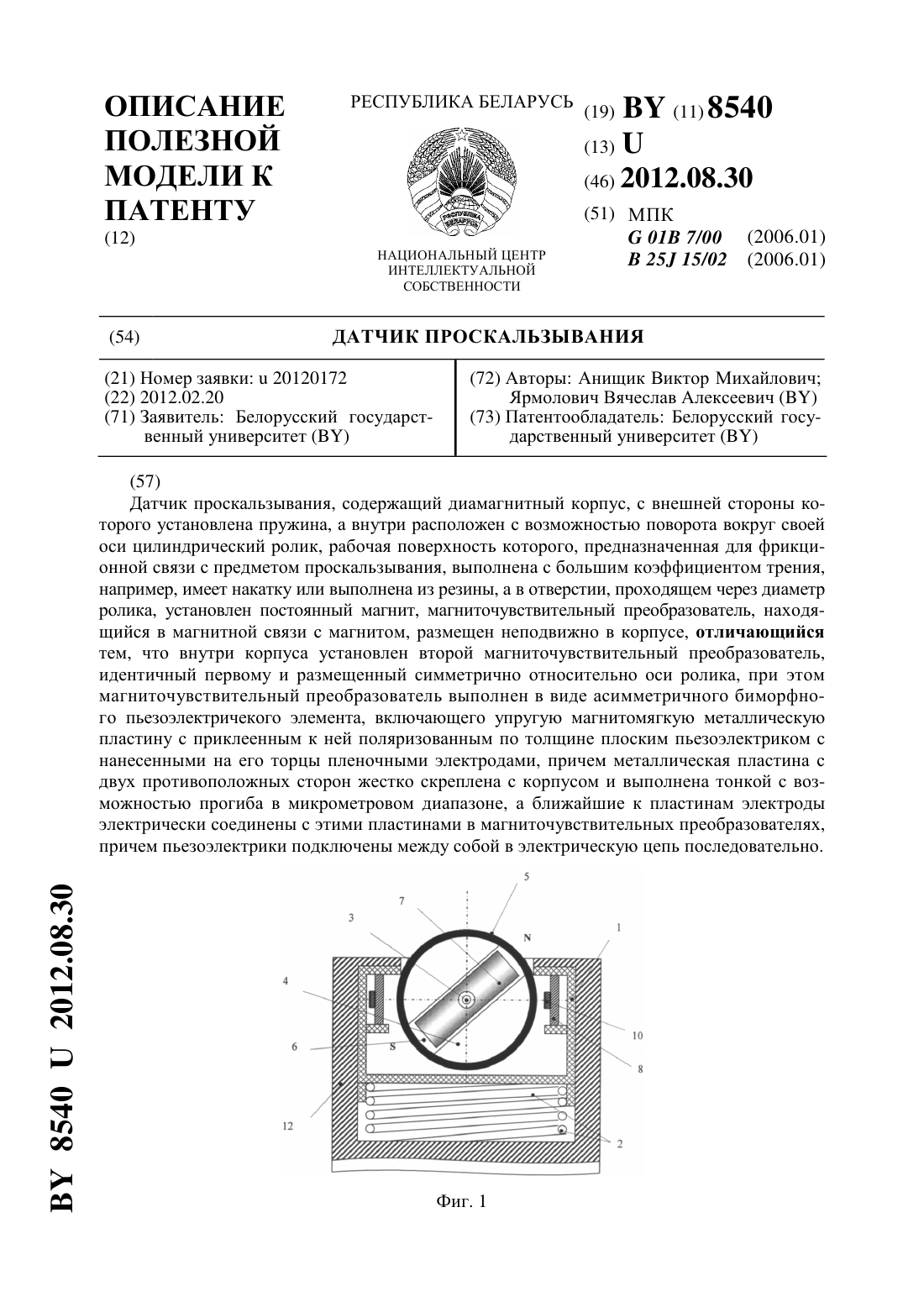
Номер патента: U 8540
Опубликовано: 30.08.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
МПК: G01B 7/00, B25J 15/02
Метки: проскальзывания, датчик
Текст:
...оси ролика, при этом магниточувствительный преобразователь выполнен в виде асимметричного биморфного пьезоэлектричекого элемента 3, включающего упругую магнитомягкую металлическую пластину с приклеенным к ней поляризованным по толщине плоским пьезоэлектриком с нанесенными на его торцы пленочными электродами, причем металлическая пластина с двух противоположных сторон жестко скреплена с корпусом и выполнена тонкой с возможностью...
Манипулятор лесной машины

Номер патента: 14291
Опубликовано: 30.04.2011
Авторы: Симанович Василий Антонович, Климчик Геннадий Яковлевич, Коробкин Владимир Андреевич, Пищов Сергей Николаевич, Мохов Сергей Петрович, Арико Сергей Евгеньевич
МПК: B25J 5/00
Метки: манипулятор, машины, лесной
Текст:
...а переходы на изгибах частей выполнены полыми, и по центральной оси обе части взаимодействуют между собой посредством упругого элемента в виде пружины, противоположные концы которой контактируют с полусферическими элементами с наконечниками, лежащими в основаниях, которые закреплены в частях рукояти, при этом полусферические элементы имеют прорези в виде конуса для размещения страховочной тяги. Техническое решение применения упругих...
Манипулятор
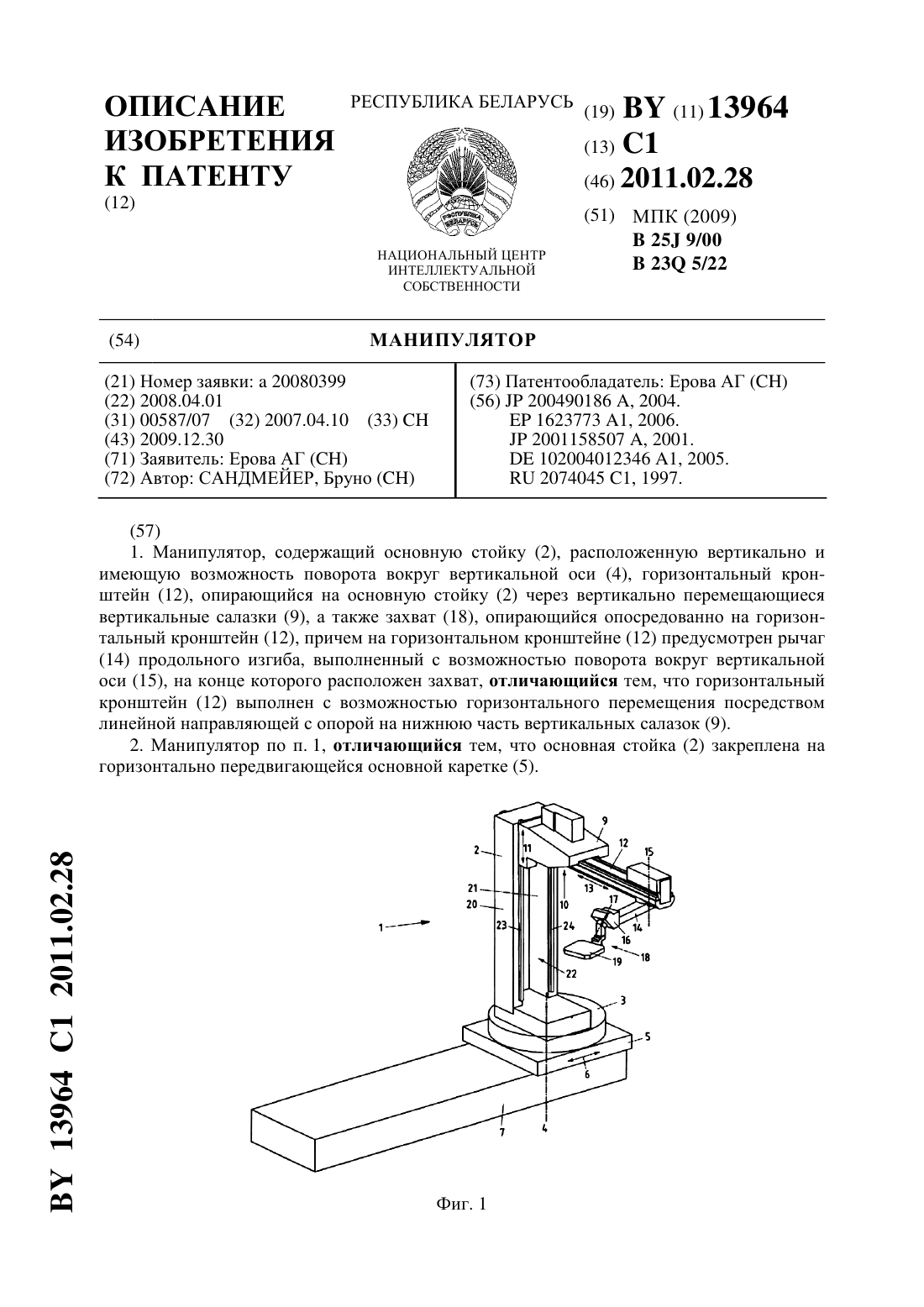
Номер патента: 13964
Опубликовано: 28.02.2011
Авторы: САНДМЕЙЕР, Бруно
Метки: манипулятор
Текст:
...салазок 9 обозначено в свою очередь двойной стрелкой 11. Вертикальные салазки 9 имеют устойчивый несущий элемент, на нижней стороне 10 которого расположен с возможностью перемещения в горизонтальном направлении горизонтальный кронштейн 12, перемещение которого также обозначено двойной стрелкой 13. Горизонтальный кронштейн 12 с помощью линейной направляющей скольжения преимущественно в форме линейного подшипника скольжения, направляющей в...
Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы
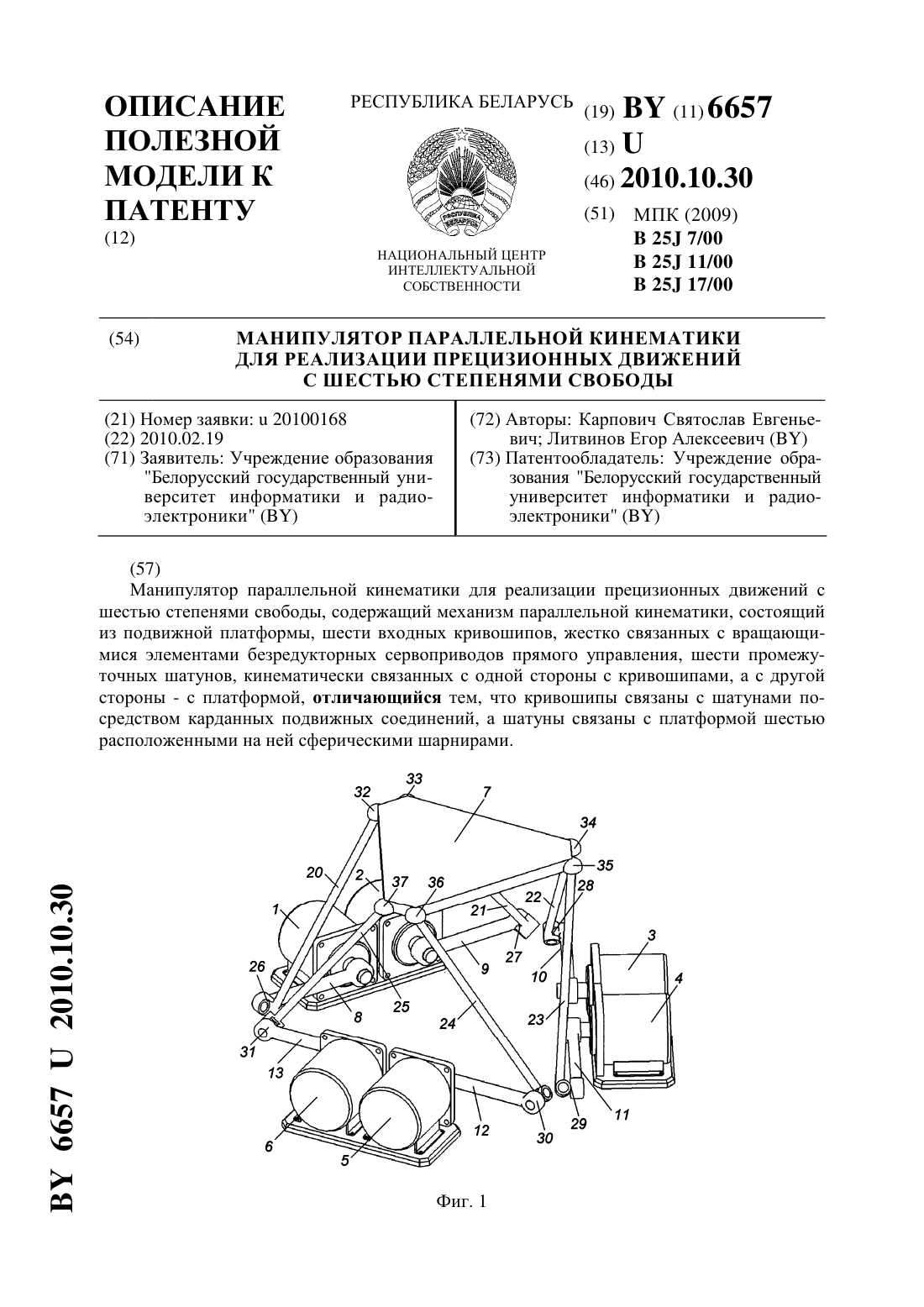
Номер патента: U 6657
Опубликовано: 30.10.2010
Авторы: Карпович Святослав Евгеньевич, Литвинов Егор Алексеевич
МПК: B25J 17/00, B25J 7/00, B25J 11/00...
Метки: кинематики, свободы, реализации, шестью, прецизионных, параллельной, манипулятор, степенями, движений
Текст:
...связаны с шатунами посредством карданных подвижных соединений, а шатуны связаны с платформой шестью расположенными на ней сферическими шарнирами. Технический результат состоит в объективной способности формирования манипулятором прецизионных, одновременно по трем координатным направлениям и трем ориентациям, с высокими динамическими характеристиками, движений с шестью степенями свободы объекта в пространстве. 66572010.10.30 Данный...
Манипулятор
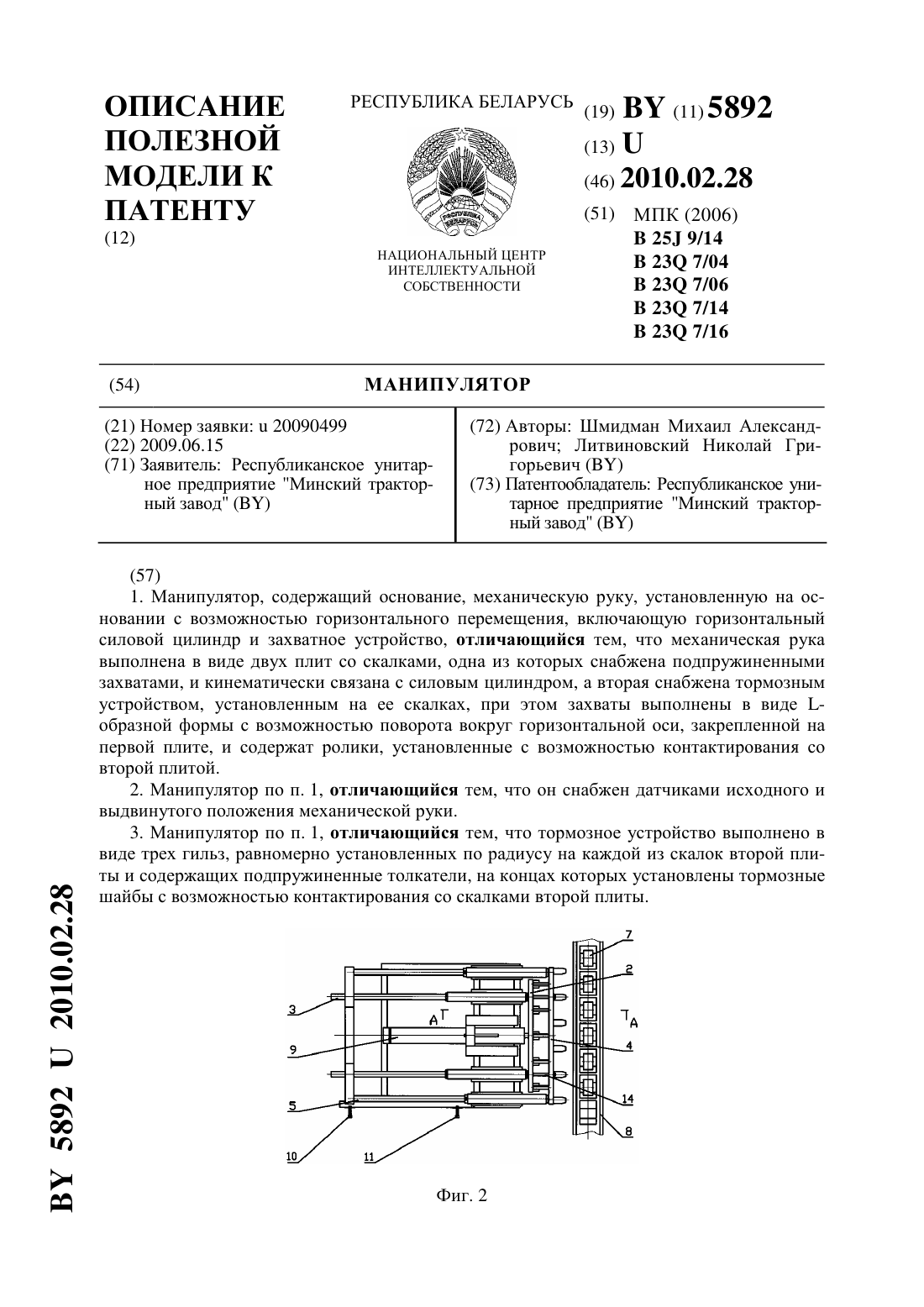
Номер патента: U 5892
Опубликовано: 28.02.2010
Авторы: Шмидман Михаил Александрович, Литвиновский Николай Григорьевич
МПК: B23Q 7/06, B23Q 7/14, B23Q 7/04...
Метки: манипулятор
Текст:
...одна из которых снабжена подпружиненными захватами, и кинематически связана с силовым цилиндром, а вторая снабжена тормозным устройством, установленным на ее скалках. При этом захваты выполнены в виде -образной формы с возможностью поворота вокруг горизонтальной оси,закрепленной на первой плите, и содержат ролики, установленные с возможностью контактирования со второй плитой. Манипулятор снабжен датчиками исходного и выдвинутого положения...
Устройство для перемещения по вертикальным поверхностям, содержащее вакуумный захват, и вакуумный захват

Номер патента: U 5235
Опубликовано: 30.04.2009
Автор: Михальчук Андрей Николаевич
МПК: B25J 15/06, B62D 57/00
Метки: перемещения, захват, поверхностям, содержащее, вертикальным, устройство, вакуумный
Текст:
...вид сбоку фиг. 5 - вид Б на фиг. 4 фиг. 6 - продольный разрез рабочего колеса фиг. 7-9 - схемы движения воздуха при функционировании вакуумного захвата фиг. 10 - схема формирования стенки вихря фиг. 11 - схема сил, действующих на вакуумный захват фиг. 12 - вид сбоку устройства для перемещения по вертикальным поверхностям фиг. 13 - вид В на фиг. 12 фиг. 14 - схема сил, действующих на устройство для перемещения по вертикальным поверхностям....
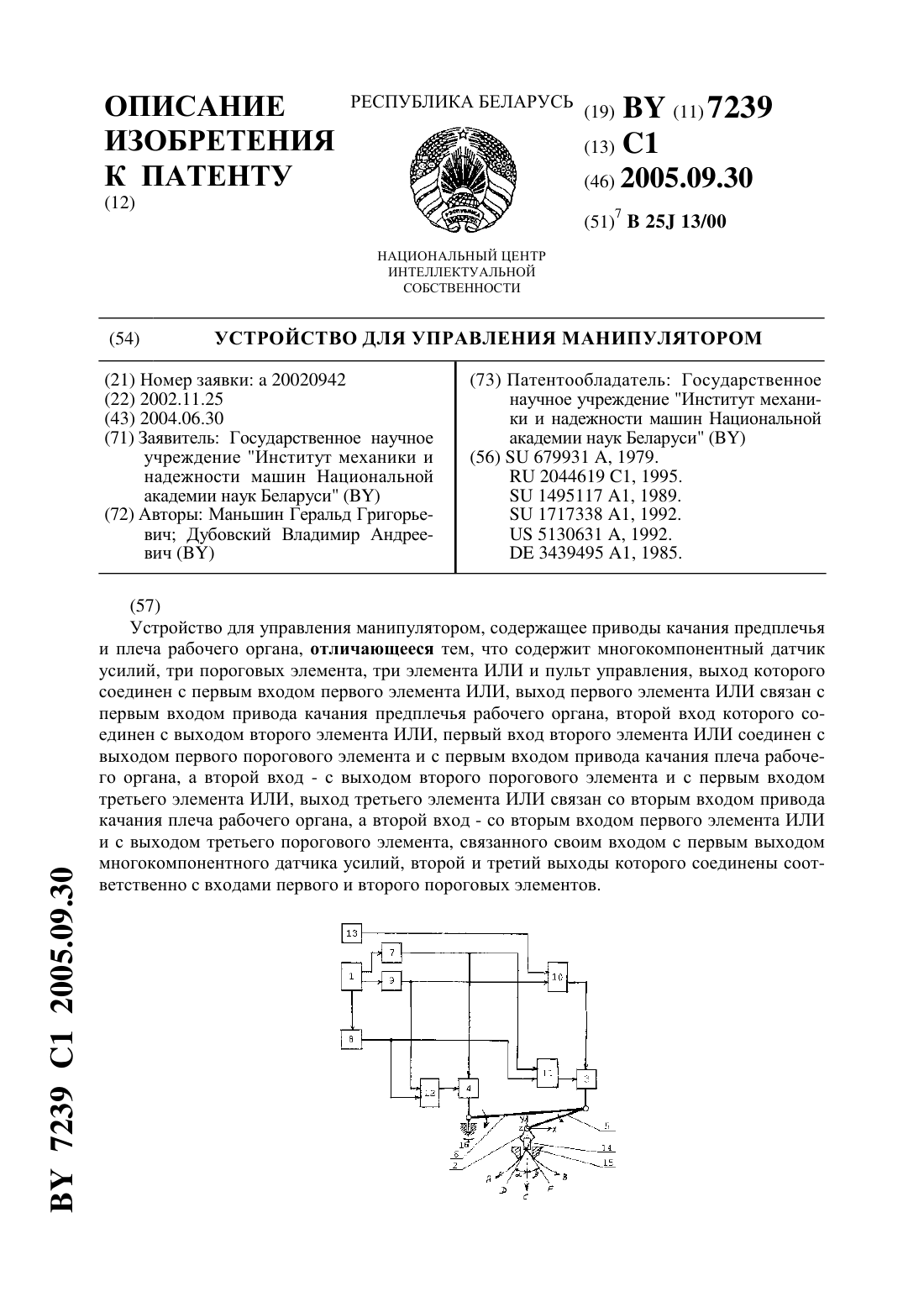
Устройство для управления манипулятором
Номер патента: 7239
Опубликовано: 30.09.2005
Авторы: Маньшин Геральд Григорьевич, Дубовский Владимир Андреевич
МПК: B25J 13/00
Метки: устройство, управления, манипулятором
Текст:
...первого и второго пороговых элементов. На чертеже представлена функциональная схема устройства для управления манипулятором при сборке изделий. Устройство содержит многокомпонентный датчик 1 усилий, установленный в рабочем органе 2, приводы 3 и 4 качания предплечья 5 и плеча 6 соответственно, первый, второй и третий пороговые элементы 7, 8 и 9 соответственно, первый, второй и третий элементы 10, 11 и 12 ИЛИ соответственно и пульт 13...
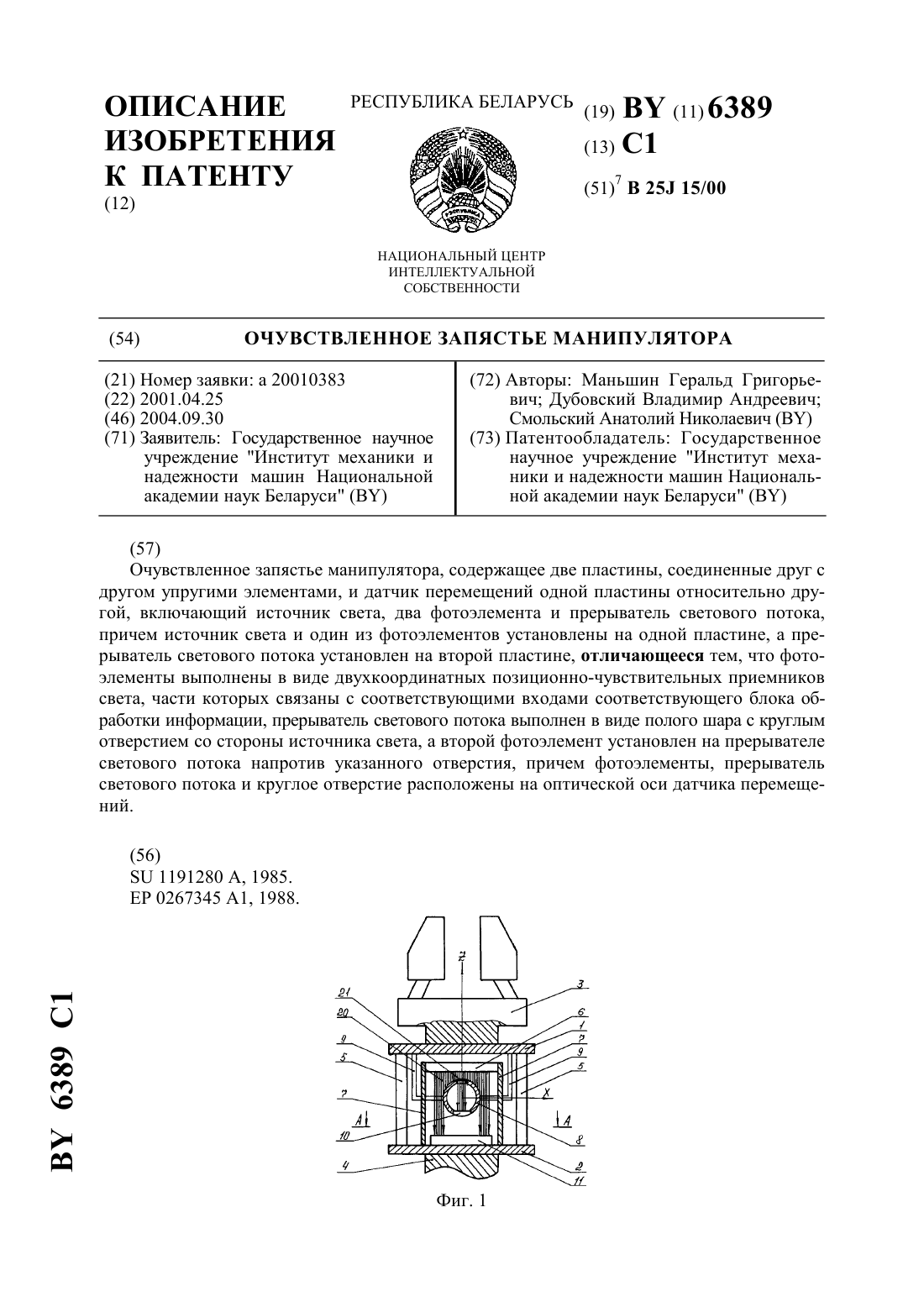
Очувствленное запястье манипулятора
Номер патента: 6389
Опубликовано: 30.09.2004
Авторы: Маньшин Геральд Григорьевич, Смольский Анатолий Николаевич, Дубовский Владимир Андреевич
МПК: B25J 15/00
Метки: очувствленное, запястье, манипулятора
Текст:
...На фиг. 1 изображено очувствленное запястье манипулятора в разрезе. 2 6389 1 На фиг. 2 - разрез А-А на фиг. 1 и блок обработки информации от фотоэлемента, расположенного на пластине. На фиг. 3 приведен блок обработки информации от фотоэлемента, расположенного на прерывателе светового потока. Очувствленное запястье манипулятора содержит пластины 1 и 2, жестко связанные соответственно со схватом 3 и механической рукой 4, упругие элементы 5...
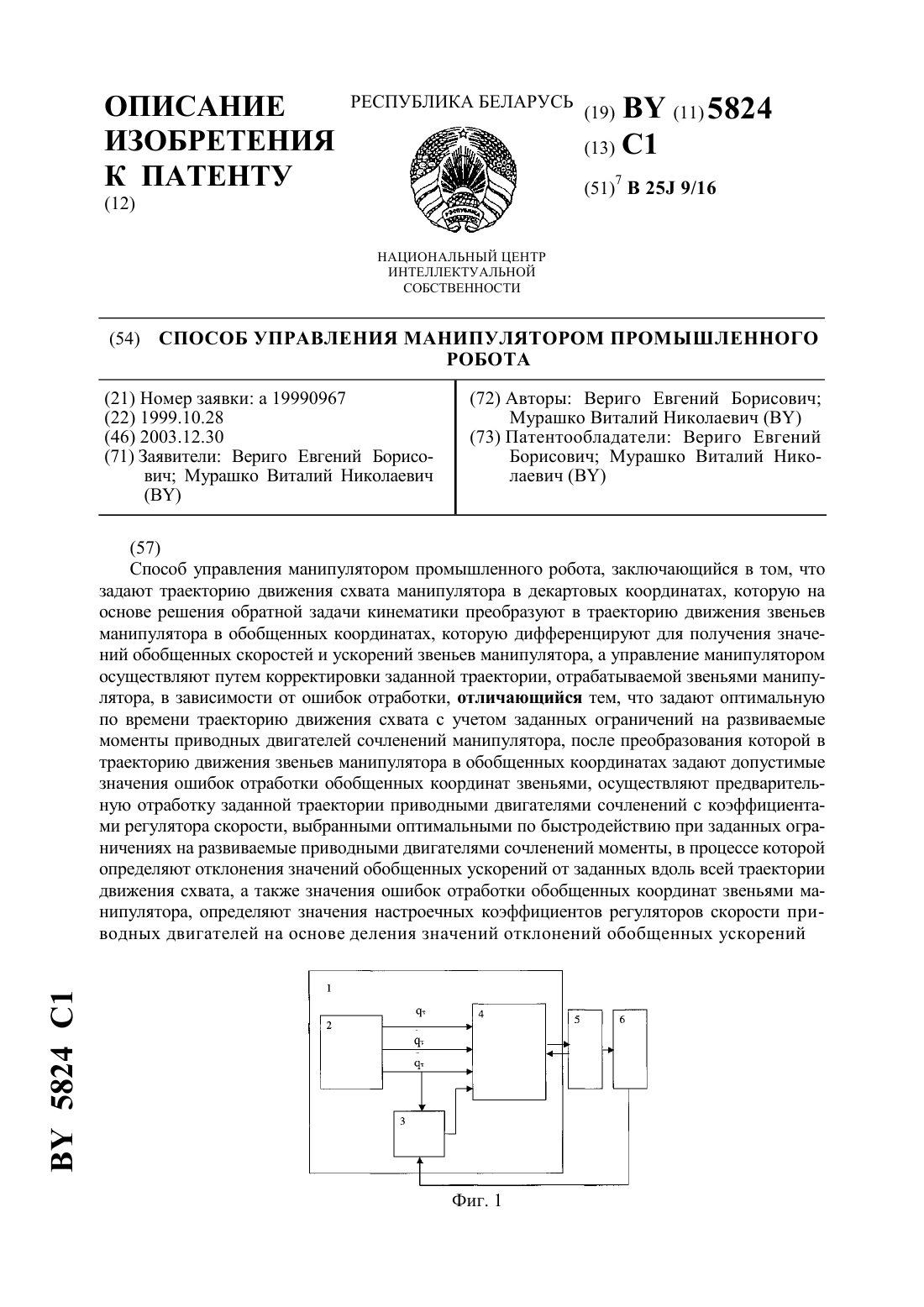
Способ управления манипулятором промышленного робота
Номер патента: 5824
Опубликовано: 30.12.2003
Авторы: Вериго Евгений Борисович, Мурашко Виталий Николаевич
МПК: B25J 9/16
Метки: робота, способ, манипулятором, управления, промышленного
Текст:
...по алгоритму, представленному в 3, учитывая ограничения по моменту приводных двигателей сочленений. Решают обратную задачу кинематики для манипулятора, определяемую выражением, где - обобщенные координаты сочленений манипулятора. Тогда для приводных двигателей сочленений манипулятора для развиваемых моментов записывают где(,) ,(, ) - нижнее предельное значение момента, развиваемого приводным двигателем -го сочленения момента,...
Способ определения положения измерительной головки манипулятора

Номер патента: 5419
Опубликовано: 30.09.2003
Авторы: Филонов Игорь Павлович, Вериго Евгений Борисович
МПК: B25J 11/00
Метки: головки, определения, измерительной, манипулятора, положения, способ
Текст:
...(2) преобразуют выражения (3) и (4) к виду х 23( 23 ) 3(6) Выражения (5) и (6) в матричной форме имеют вид где 2 - ошибка отработки обобщенной координаты 2 3 - ошибка отработки обобщенной координаты 3 х - ошибка положения измерительной головки относительно базовой оси х 0 системы координат робота у - ошибка положения измерительной головки относительно базовой оси у 0 системы координат робота. Матрица 22 в правой части матричной записи...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: управления, манипулятором, робота, промышленного, способ
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Шарнир манипулятора

Номер патента: 5083
Опубликовано: 30.03.2003
Автор: Вериго Евгений Борисович
МПК: B25J 17/00
Метки: манипулятора, шарнир
Текст:
...уменьшить износ контактирующих поверхностей сферической головки 1 и опоры 2 шарнира манипулятора. Прокладка 6 из пористого материала с микропорами служит для хранения дополнительного запаса смазывающей жидкости 7. Материал пористого тела подбирается таким,что он смачивается жидкостью высокомолекулярного полимера. Пористое тело 6 и смазывающая жидкость 7 находятся в непосредственном контакте, поэтому смазывающая жидкость под...
Способ управления манипулятором промышленного робота

Номер патента: 4972
Опубликовано: 30.03.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: манипулятором, управления, робота, промышленного, способ
Текст:
...схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль...
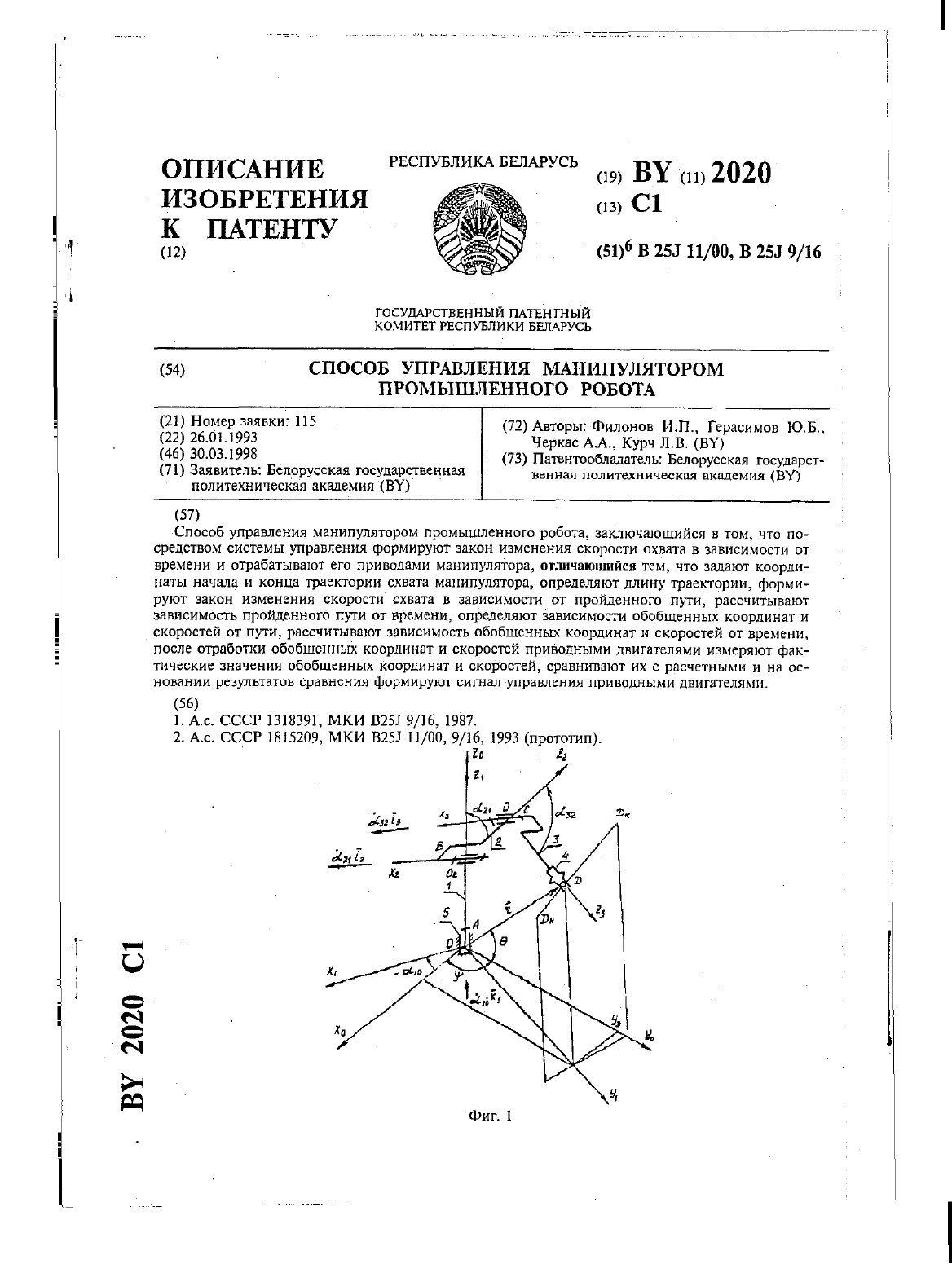
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Черкас Александр Адамович, Курч Леонид Витальевич, Герасимов Юрий Борисович, Филонов Игорь Павлович
МПК: B25J 11/00, B25J 9/16
Метки: манипулятором, робота, способ, управления, промышленного
Текст:
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...