Манипулятор
Номер патента: U 5892
Опубликовано: 28.02.2010
Авторы: Шмидман Михаил Александрович, Литвиновский Николай Григорьевич
Текст
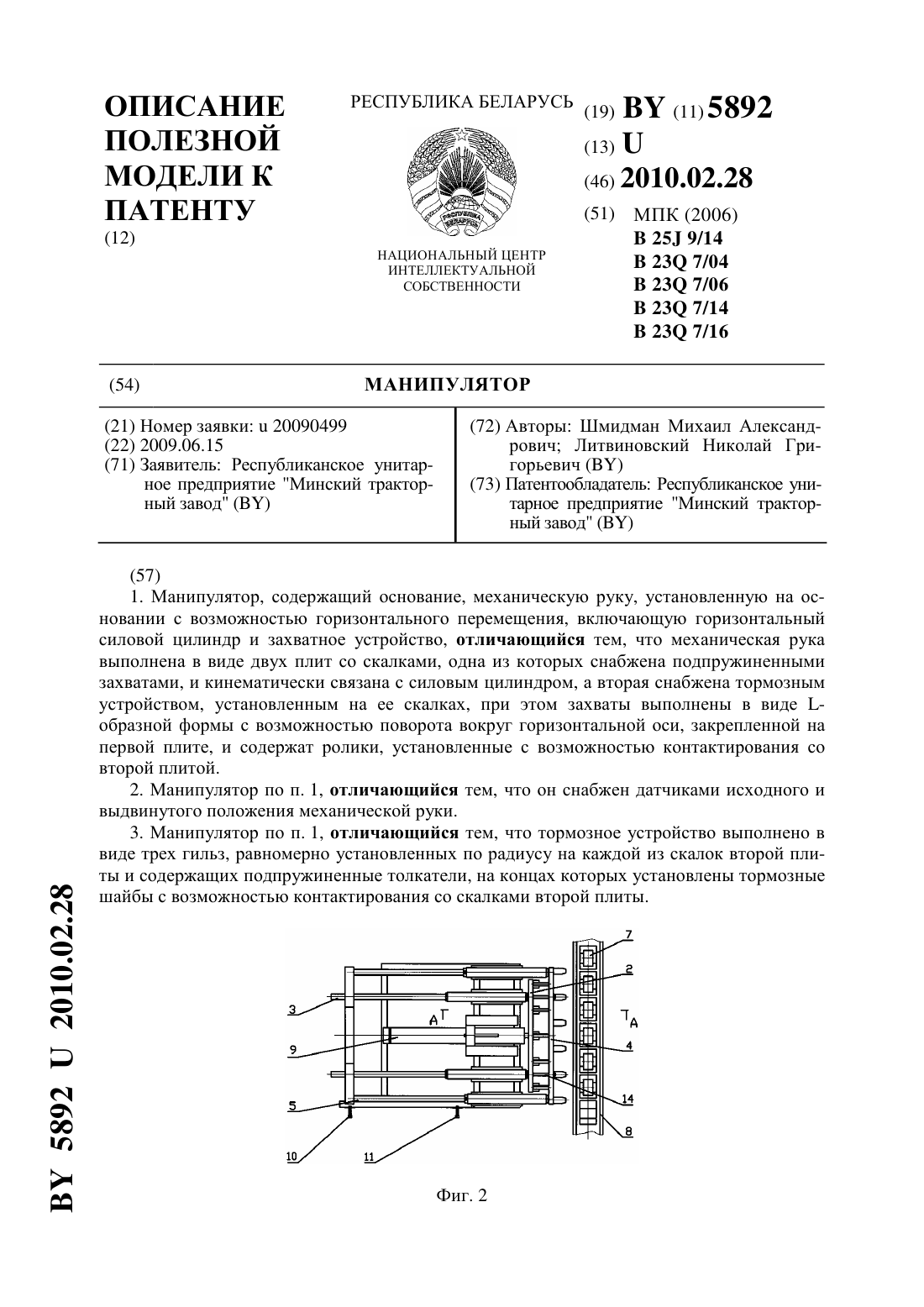
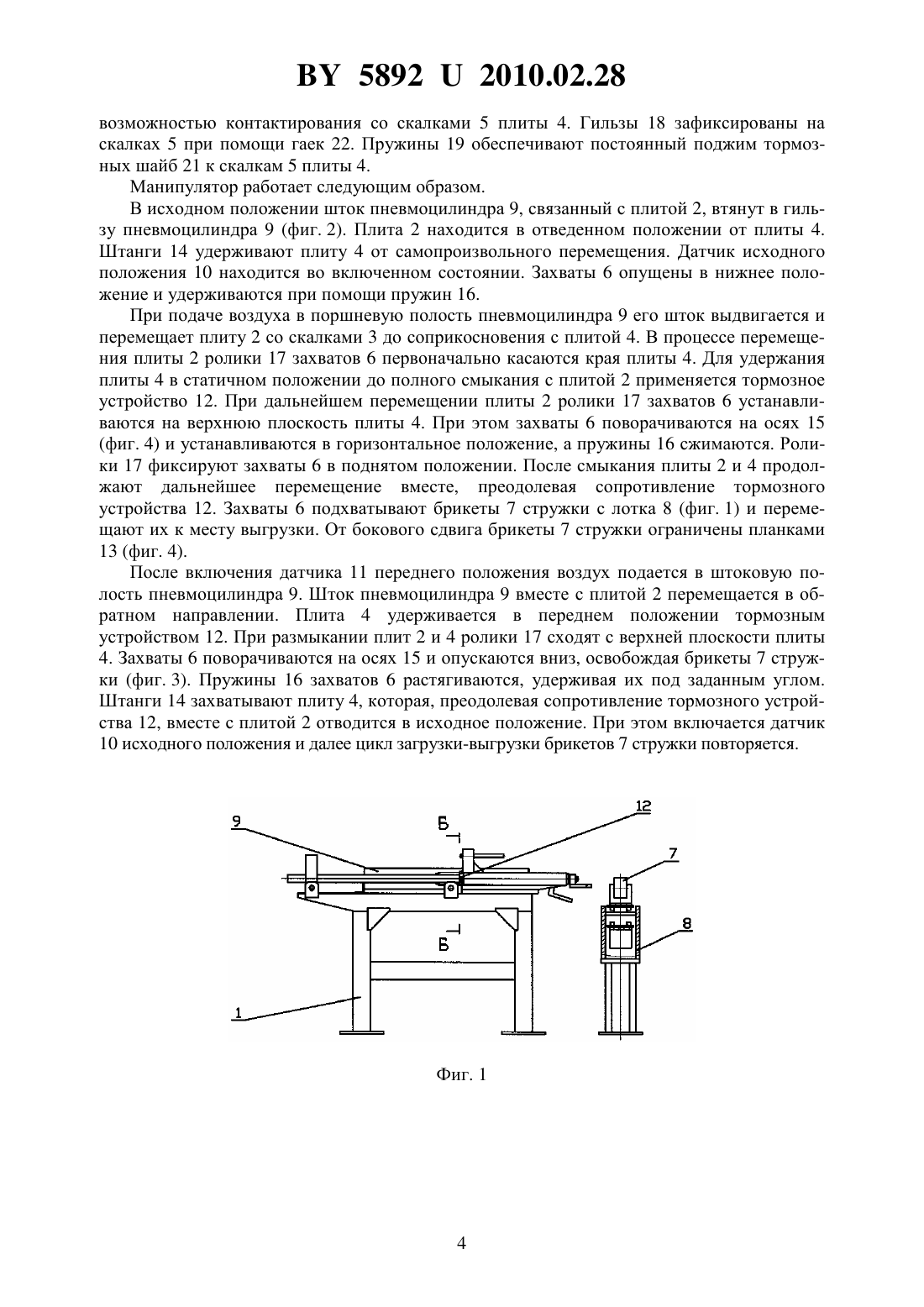
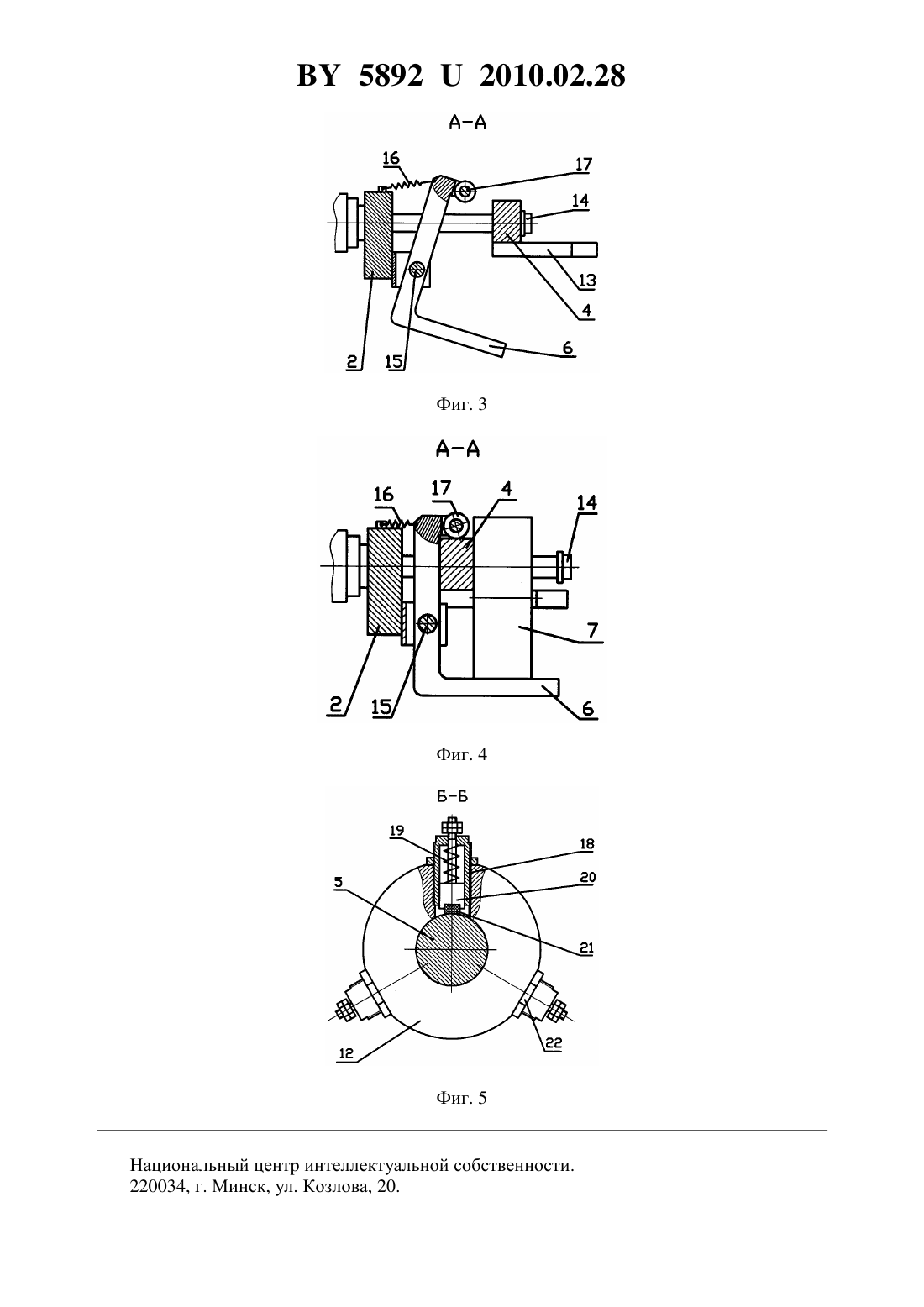
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Республиканское унитарное предприятие Минский тракторный завод(72) Авторы Шмидман Михаил Александрович Литвиновский Николай Григорьевич(73) Патентообладатель Республиканское унитарное предприятие Минский тракторный завод(57) 1. Манипулятор, содержащий основание, механическую руку, установленную на основании с возможностью горизонтального перемещения, включающую горизонтальный силовой цилиндр и захватное устройство, отличающийся тем, что механическая рука выполнена в виде двух плит со скалками, одна из которых снабжена подпружиненными захватами, и кинематически связана с силовым цилиндром, а вторая снабжена тормозным устройством, установленным на ее скалках, при этом захваты выполнены в виде образной формы с возможностью поворота вокруг горизонтальной оси, закрепленной на первой плите, и содержат ролики, установленные с возможностью контактирования со второй плитой. 2. Манипулятор по п. 1, отличающийся тем, что он снабжен датчиками исходного и выдвинутого положения механической руки. 3. Манипулятор по п. 1, отличающийся тем, что тормозное устройство выполнено в виде трех гильз, равномерно установленных по радиусу на каждой из скалок второй плиты и содержащих подпружиненные толкатели, на концах которых установлены тормозные шайбы с возможностью контактирования со скалками второй плиты.(56) 1. Иванов А.П. Механизация и автоматизация технологических процессов в машиностроении.- М. Машгиз, 1960.- С. 297, 298. 2. А. с. СССР 1229039, МПК 25 18/02, 1986. 3. А. с. СССР 1334561, МПК 25 9/00, 1999. 4. Патент РФ 2228259 2, МПК 25 18/00, 2004. 5. Патент РФ 2296039 2, МПК 23 7/04, 25 9/00, 2007. 6. Патент РФ 71290 1, МПК 25 9/00, 9/14, 2008 (прототип). Полезная модель относится к области машиностроения, а именно к манипуляторам для автоматической загрузки деталей типа тел вращения, и может найти применение, в частности, в области автоматизации процесса подготовки стружковых отходов металлообработки к металлургическому переплаву, и может быть использована для автоматической загрузки цилиндрических брикетов стружки в конвейер печи. Известны манипуляторы, содержащие основание, механическую руку, установленную на основании с возможностью горизонтального и вертикального перемещения и несущую захватное устройство 1-4. Недостатками известных манипуляторов являются большое количество элементов и сложность конструкции, что снижает их использование. Известен также автооператор металлорежущих станков, содержащий основание, на котором с возможностью поворота от силового цилиндра установлен рычаг с размещенным на нем двухзахватным устройством с корпусом, симметрично установленными относительно оси автооператора захватами, устройство сбора стружки и смазочноохлаждающей жидкости и ограничитель угла поворота рычага. Двухзахватное устройство установлено с возможностью движения по траектории, исключающей пересечение зоны устройства сбора стружки и смазочно-охлаждающей жидкости и возвратнопоступательного перемещения от силового цилиндра посредством скалок. Упомянутые скалки размещены в каретке, неподвижно закрепленной на конце рычага. Захваты двухзахватного устройства направлены в одну сторону. Каждый из упомянутых захватов выполнен в виде защитного каркаса с ориентирующим гнездом предварительной установки,ориентирующим центром и подвижными губками в виде двуплечих рычагов. Одно плечо каждого из указанных двуплечих рычагов связано со штоком силового цилиндра, встроенного в корпус двухзахватного устройства. При этом рычаг выполнен с каналами для подачи рабочей жидкости к силовым цилиндрам, встроенным в корпус двухзахватного устройства, и к силовому цилиндру для возвратно-поступательного перемещения двухзахватного устройства 5. Однако известный манипулятор также выполнен достаточно сложным по конструкции. В качестве прототипа настоящей полезной модели выбран манипулятор подачи заготовок на токарном станке с ЧПУ, содержащий основание, механическую руку, установленную на основании с возможностью горизонтального и вертикального перемещения. Механическая рука включает два пневмоцилиндра - вертикальный и горизонтальный, соединенных между собой ортогонально, и пневмозахват, выполненный в виде двух скоб с цилиндрическими внутренними поверхностями и с пневмоцилиндром для зажима и разжима двух скоб и размещенный на конце горизонтального пневмоцилиндра 6. Недостаток известного манипулятора состоит в его ограниченных возможностях, заключающихся в перемещении и загрузке только одной детали, а также в наличии двух пневмоцилиндров для привода механической руки и третьего пневмоцилиндра для привода скоб пневмозахвата, что усложняет его конструкцию. 58922010.02.28 Задачей настоящей полезной модели является упрощение конструкции и повышение производительности манипулятора. Поставленная задача решается тем, что в манипуляторе, содержащем основание, механическую руку, установленную на основании с возможностью горизонтального перемещения, включающую горизонтальный силовой цилиндр и захватное устройство,механическая рука выполнена в виде двух плит со скалками, одна из которых снабжена подпружиненными захватами, и кинематически связана с силовым цилиндром, а вторая снабжена тормозным устройством, установленным на ее скалках. При этом захваты выполнены в виде -образной формы с возможностью поворота вокруг горизонтальной оси,закрепленной на первой плите, и содержат ролики, установленные с возможностью контактирования со второй плитой. Манипулятор снабжен датчиками исходного и выдвинутого положения механической руки. Тормозное устройство выполнено в виде трех гильз, равномерно установленных по радиусу на каждой из скалок второй плиты и содержащих подпружиненные толкатели, на концах которых установлены тормозные шайбы с возможностью контактирования со скалками второй плиты. Технический результат, получаемый при решении поставленной задачи, состоит в следующем возможность захвата и перемещения одновременно нескольких деталей типа вал применение в конструкции манипулятора только одного силового цилиндра для привода механической руки, загрузки, перемещения и выгрузки деталей тормозное устройство второй плиты способствует демпфированию перемещения механической руки манипулятора при загрузке, перемещении и выгрузке нескольких деталей типа вал, используя только один силовой цилиндр упрощается процесс загрузки, перемещения и выгрузки нескольких деталей. На фиг. 1 схематично изображен манипулятор загрузки деталей типа вал с лотком для деталей. На фиг. 2 - то же, вид сверху. На фиг. 3 схематично изображено захватное устройство в исходном положении, разрез А-А на фиг. 2. На фиг. 4 - то же, в выдвинутом положении с захваченной деталью. На фиг. 5 схематично изображено тормозное устройство, разрез Б-Б на фиг. 1. Манипулятор загрузки деталей типа вал, например цилиндрических брикетов стружки, в нагревательную печь содержит основные узлы и детали (фиг. 1) основание 1, механическую руку, выполненную в виде плиты 2 со скалками 3 и плиты 4 со скалками 5,захваты 6 (фиг. 4) для загрузки брикетов 7 стружки с лотка 8 (фиг. 1), силовой цилиндр,например пневмоцилиндр 9 (фиг. 2), датчик 10 исходного положения механической руки,датчик 11 переднего выдвинутого положения механической руки, тормозное устройство 12 (фиг. 1), планки 13 для удерживания брикетов 7 стружки (фиг. 3, 4) и штанги 14 возврата плиты 4 в исходное положение. Плита 2 кинематически связана со штоком пневмоцилиндра 9, а штанги 14 выполнены за одно целое со скалками 3 плиты 2. Захваты 6 (фиг. 3, 4) установлены с возможностью поворота вокруг горизонтальной оси 15, закрепленной на плите 2, и подпружинены к ней с помощью пружин 16, удерживающих их под углом, например, 15-20 к горизонтальной плоскости. Пружины 16 служат для предотвращения упирания захватов 6 в лоток 8 при загрузке брикетов 7 стружки. Захваты 6 также снабжены роликами 17, установленными с возможностью контактирования с плитой 4 и предназначенными для удержания захватов 6 в горизонтальном положении после загрузки брикетов 7 стружки с лотка 8. Тормозное устройство 12 (фиг. 5) состоит из трех гильз 18, равномерно установленных по радиусу вокруг скалок 5 плиты 4. Внутри гильз 18 установлены подпружиненные с помощью пружин 19 толкатели 20, на конце которых закреплены тормозные шайбы 21 с 3 58922010.02.28 возможностью контактирования со скалками 5 плиты 4. Гильзы 18 зафиксированы на скалках 5 при помощи гаек 22. Пружины 19 обеспечивают постоянный поджим тормозных шайб 21 к скалкам 5 плиты 4. Манипулятор работает следующим образом. В исходном положении шток пневмоцилиндра 9, связанный с плитой 2, втянут в гильзу пневмоцилиндра 9 (фиг. 2). Плита 2 находится в отведенном положении от плиты 4. Штанги 14 удерживают плиту 4 от самопроизвольного перемещения. Датчик исходного положения 10 находится во включенном состоянии. Захваты 6 опущены в нижнее положение и удерживаются при помощи пружин 16. При подаче воздуха в поршневую полость пневмоцилиндра 9 его шток выдвигается и перемещает плиту 2 со скалками 3 до соприкосновения с плитой 4. В процессе перемещения плиты 2 ролики 17 захватов 6 первоначально касаются края плиты 4. Для удержания плиты 4 в статичном положении до полного смыкания с плитой 2 применяется тормозное устройство 12. При дальнейшем перемещении плиты 2 ролики 17 захватов 6 устанавливаются на верхнюю плоскость плиты 4. При этом захваты 6 поворачиваются на осях 15(фиг. 4) и устанавливаются в горизонтальное положение, а пружины 16 сжимаются. Ролики 17 фиксируют захваты 6 в поднятом положении. После смыкания плиты 2 и 4 продолжают дальнейшее перемещение вместе, преодолевая сопротивление тормозного устройства 12. Захваты 6 подхватывают брикеты 7 стружки с лотка 8 (фиг. 1) и перемещают их к месту выгрузки. От бокового сдвига брикеты 7 стружки ограничены планками 13 (фиг. 4). После включения датчика 11 переднего положения воздух подается в штоковую полость пневмоцилиндра 9. Шток пневмоцилиндра 9 вместе с плитой 2 перемещается в обратном направлении. Плита 4 удерживается в переднем положении тормозным устройством 12. При размыкании плит 2 и 4 ролики 17 сходят с верхней плоскости плиты 4. Захваты 6 поворачиваются на осях 15 и опускаются вниз, освобождая брикеты 7 стружки (фиг. 3). Пружины 16 захватов 6 растягиваются, удерживая их под заданным углом. Штанги 14 захватывают плиту 4, которая, преодолевая сопротивление тормозного устройства 12, вместе с плитой 2 отводится в исходное положение. При этом включается датчик 10 исходного положения и далее цикл загрузки-выгрузки брикетов 7 стружки повторяется. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: B23Q 7/16, B23Q 7/14, B23Q 7/04, B25J 9/14, B23Q 7/06
Метки: манипулятор
Код ссылки
<a href="https://by.patents.su/5-u5892-manipulyator.html" rel="bookmark" title="База патентов Беларуси">Манипулятор</a>
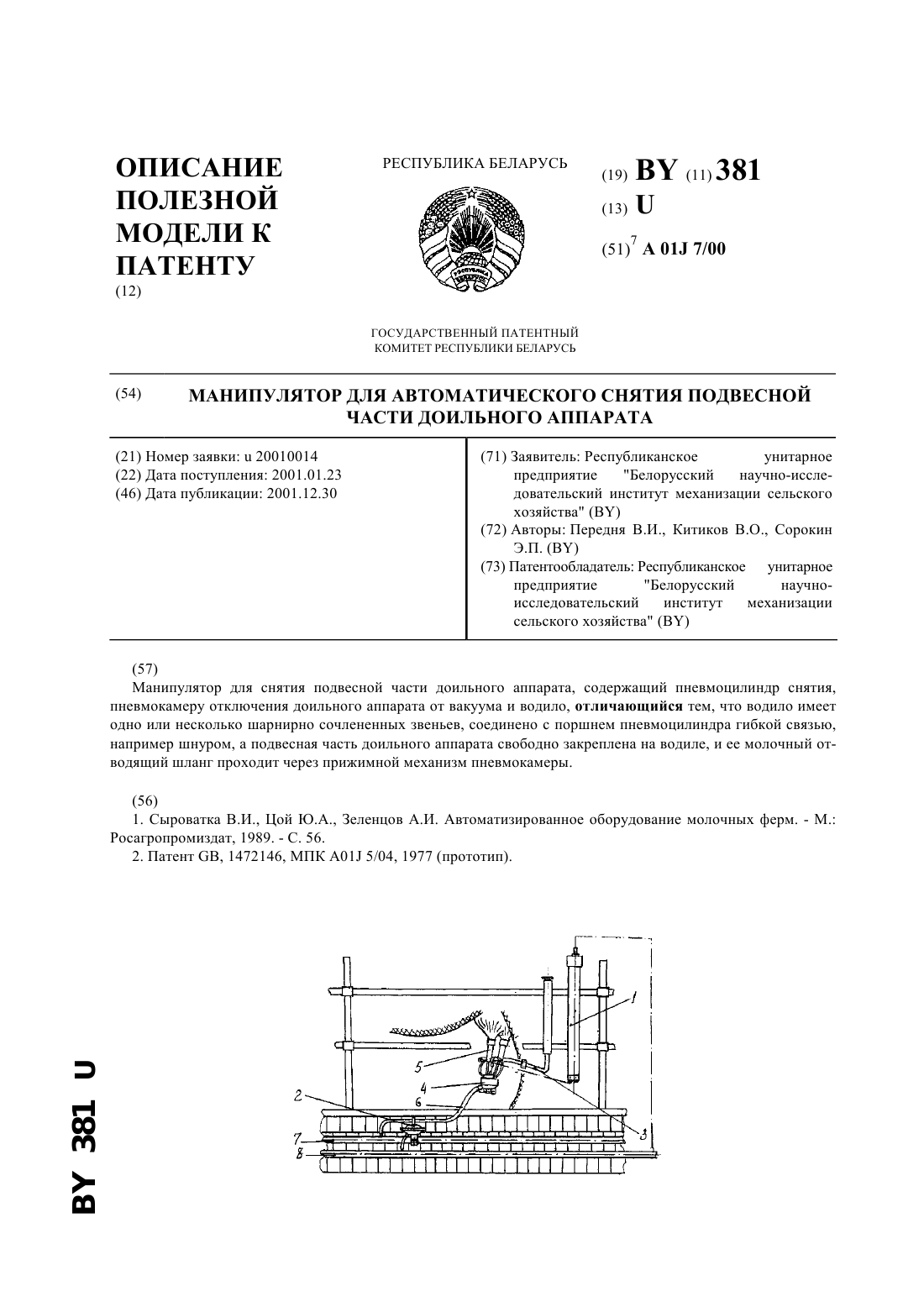
Манипулятор для автоматического снятия подвесной части доильного аппарата
Номер патента: U 381
Опубликовано: 30.12.2001
Авторы: Передня Владимир Иванович, Сорокин Эдуард Петрович, Китиков Вадим Олегович
МПК: A01J 7/00
Метки: части, автоматического, манипулятор, подвесной, снятия, аппарата, доильного
Текст:
...(стягивания) подвесной части доильного аппарата. 2. Возможность падения и загрязнения доильных стаканов во время снятия вследствие незначительного нарушения регулировки манипулятора. Задачей полезной модели является ликвидация передачи болевызывающих усилий на соски вымени и исключение падения и загрязнения доильных стаканов во время их автоматического снятия. Указанный результат достигается тем, что манипулятор включает пневмоцилиндр...
Манипулятор

Номер патента: U 3066
Опубликовано: 30.10.2006
Авторы: Пунько Андрей Иванович, Дашков Владимир Николаевич, Китиков Вадим Олегович, Сорокин Эдуард Петрович
МПК: A01J 7/00
Метки: манипулятор
Текст:
...повышение скорости молокоотдачи, а также надежности работы доильной установки за счет упрощения конструкции манипулятора, исключение необходимости процесса додоя коровы. Указанный технический результат достигается тем, что в манипуляторе, содержащим доильный аппарат, пневмоцилиндр снятия доильного аппарата с гибкой связью, водило,которое свободно посажено одним концом во внутреннюю трубу и соединено с ней при помощи троса, перекинутого...
Манипулятор
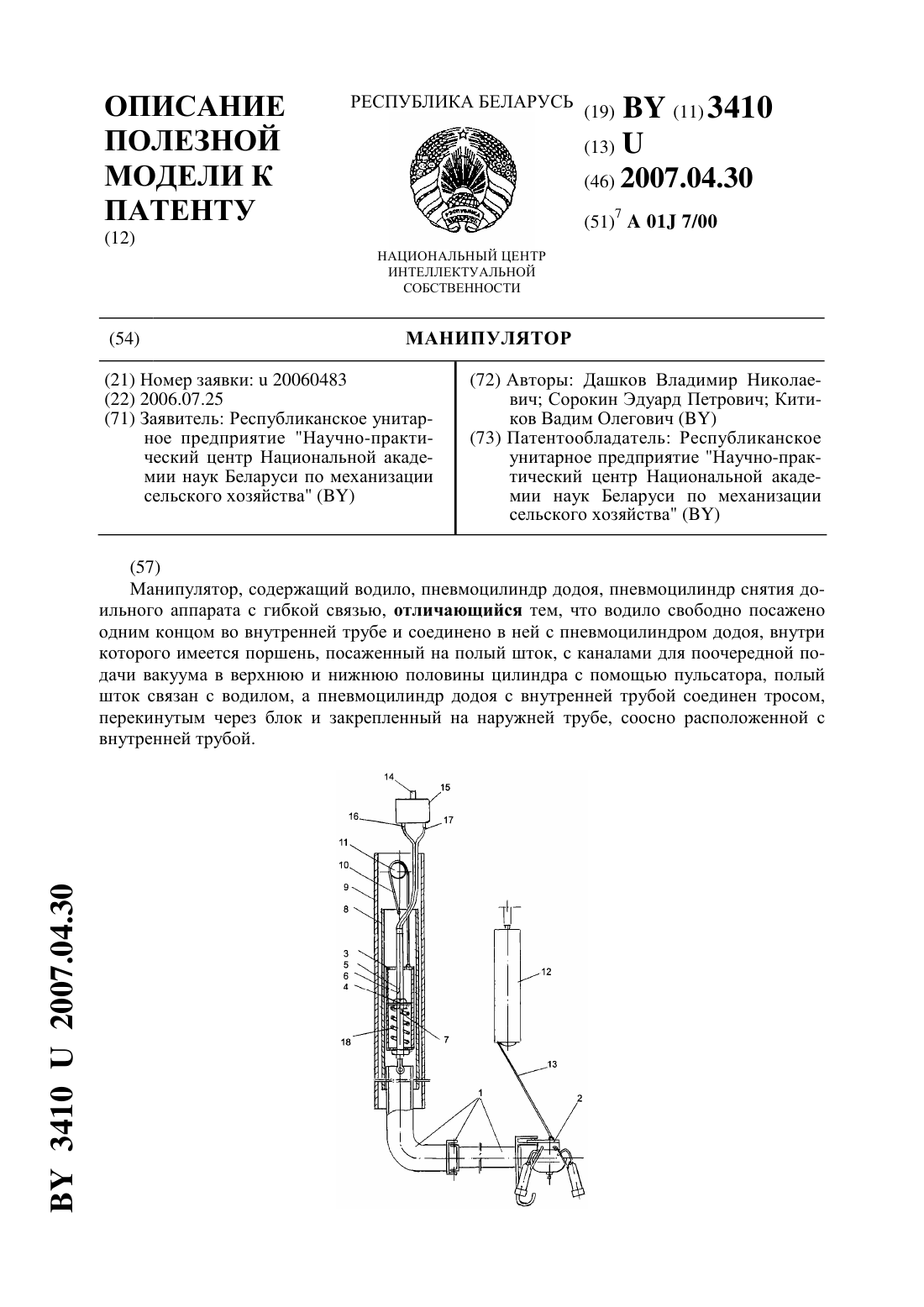
Номер патента: U 3410
Опубликовано: 30.04.2007
Авторы: Сорокин Эдуард Петрович, Китиков Вадим Олегович, Дашков Владимир Николаевич
МПК: A01J 7/00
Метки: манипулятор
Текст:
...на разной высоте от пола. Это нередко вызывает необходимость снятия доильного аппарата с манипулятора и осуществлять доение коров без него. Задачей полезной модели является повышение производительности труда операторов машинного доения, компактности манипулятора и более полное выдаивание вымени во время додоя, вследствие его массажа. Указанный технический результат достигается тем, что водило свободно посажено одним концом во...
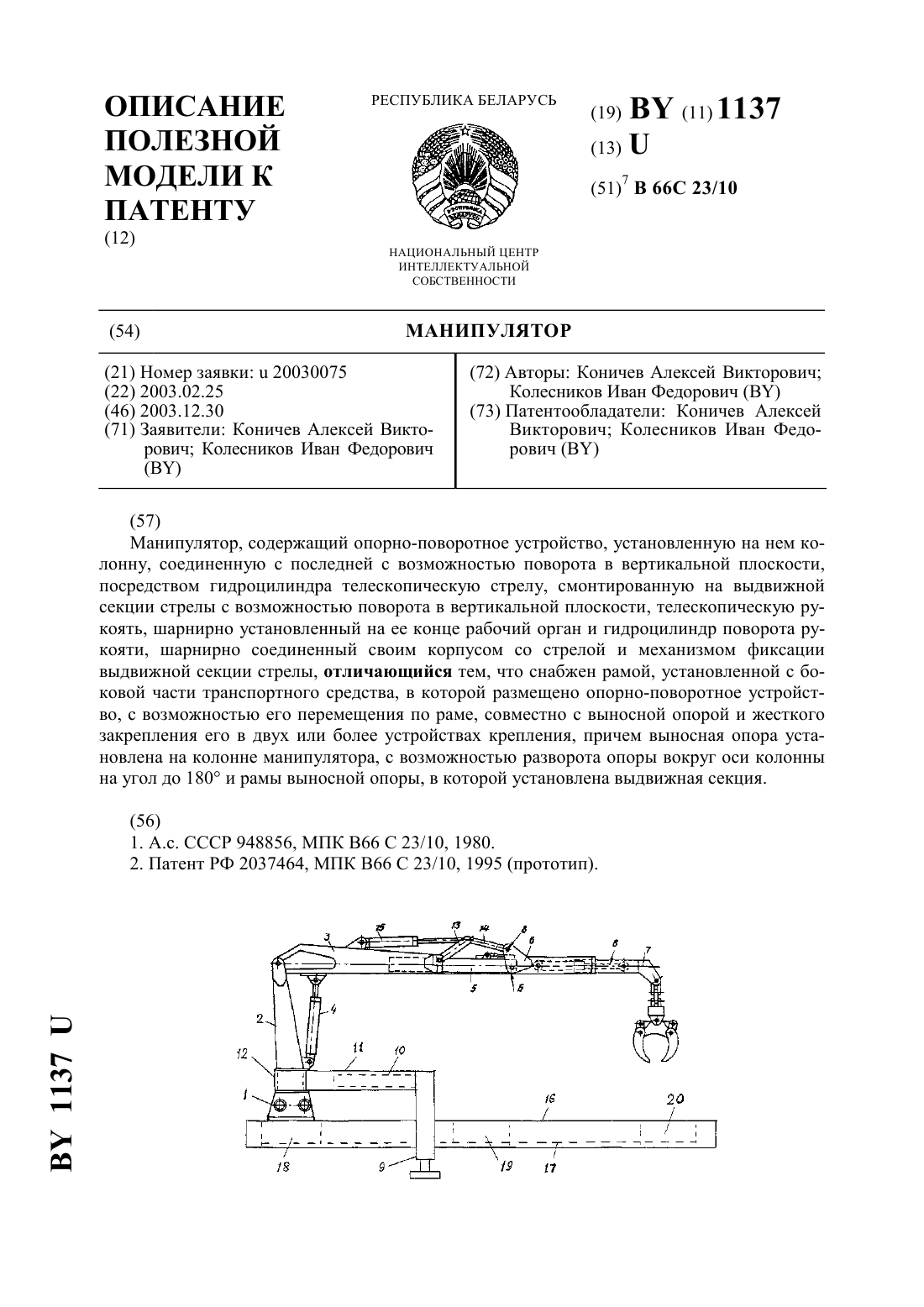
Манипулятор
Номер патента: U 1137
Опубликовано: 30.12.2003
Авторы: Колесников Иван Федорович, Коничев Алексей Викторович
МПК: B66C 23/10
Метки: манипулятор
Текст:
...установленную на нем колонну,соединенную с последней с возможностью поворота в вертикальной плоскости, посредством гидроцилиндра телескопическую стрелу, смонтированную на выдвижной секции стрелы с возможностью поворота в вертикальной плоскости, телескопическую рукоять,шарнирно установленный на ее конце рабочий орган и гидроцилиндр поворота рукояти,шарнирно соединенный своим корпусом со стрелой и механизмом фиксации выдвижной секции стрелы,...
Манипулятор

Номер патента: U 3069
Опубликовано: 30.10.2006
Авторы: Сорокин Эдуард Петрович, Лосик Сергей Викторович, Передня Владимир Иванович
МПК: A01J 7/00
Метки: манипулятор
Текст:
...на разной высоте от пола. Это нередко вызывает необходимость снятия доильного аппарата с манипулятора и доить коров без него. Задачей полезной модели является повышение производительности труда операторов машинного доения и компактности манипулятора. Указанный технический результат достигается тем, что водило свободно посажено одним концом во внутренней в трубе и соединено в ней с пневмоцилиндром, внутри которого имеется пружина с поршнем,...
Предыдущий патент: Многорядный цепенесущий конвейер
Следующий патент: Мелющее тело
Случайный патент: Резонансный преобразователь