Помехоустойчивый датчик проскальзывания

Текст
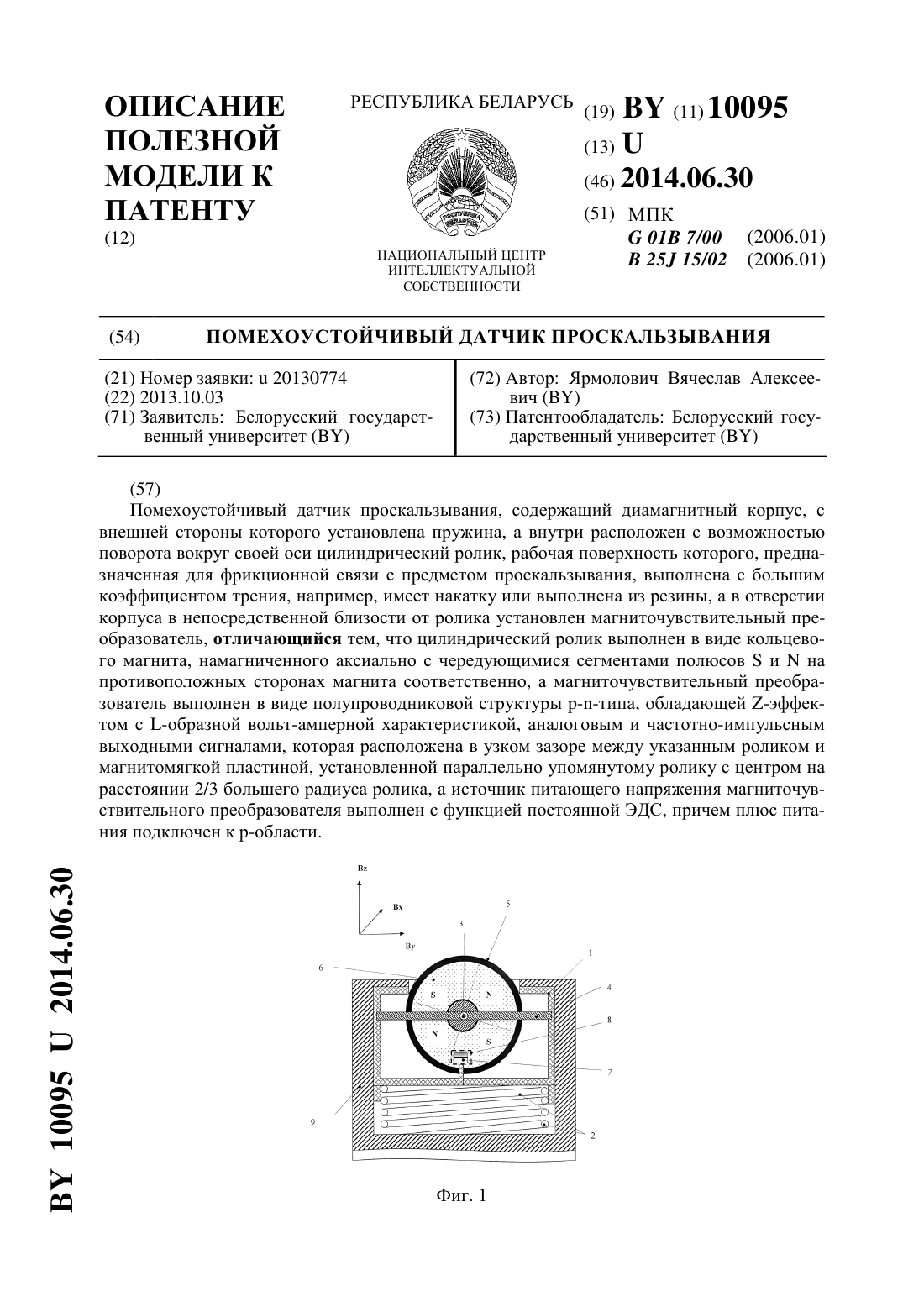
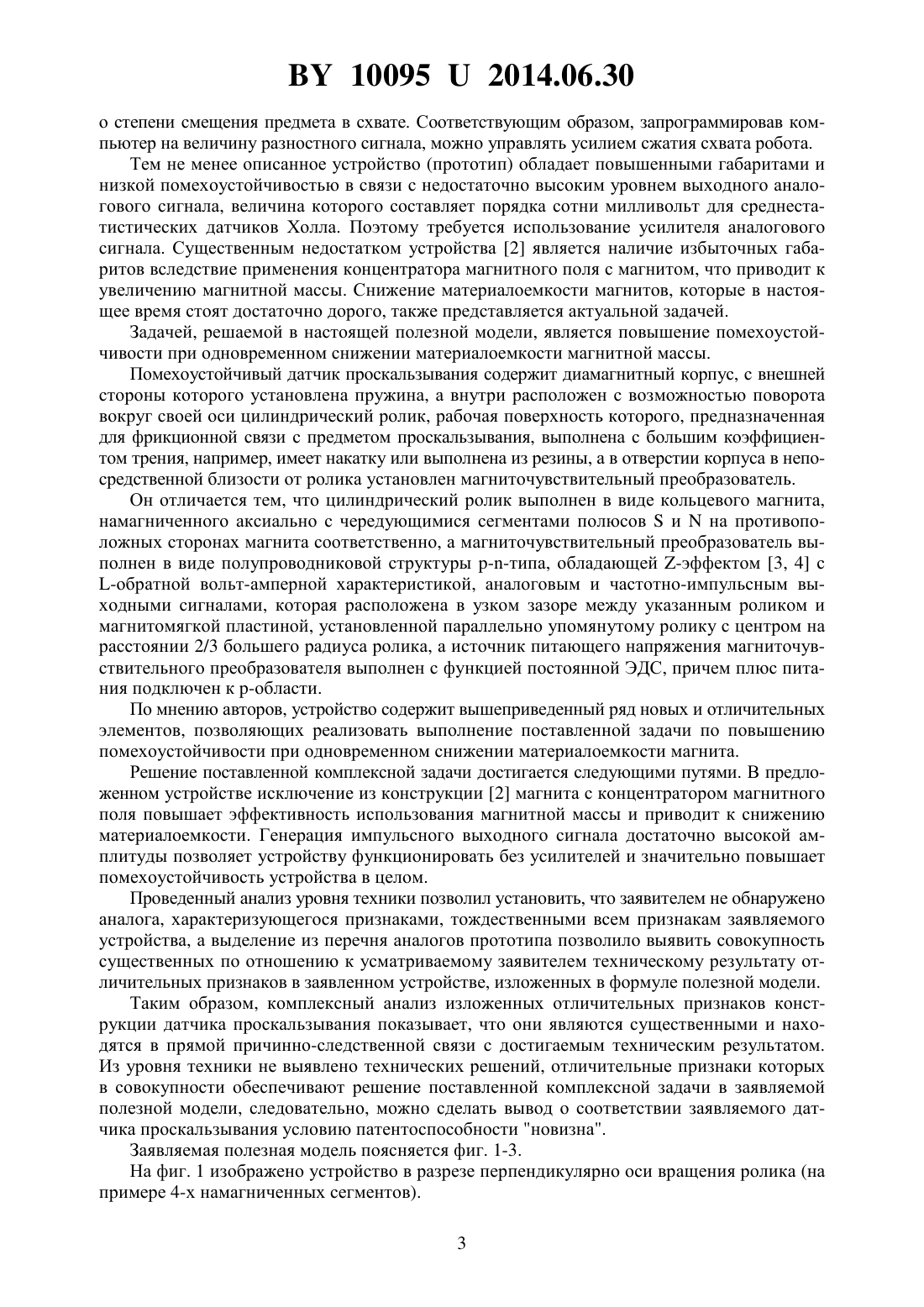
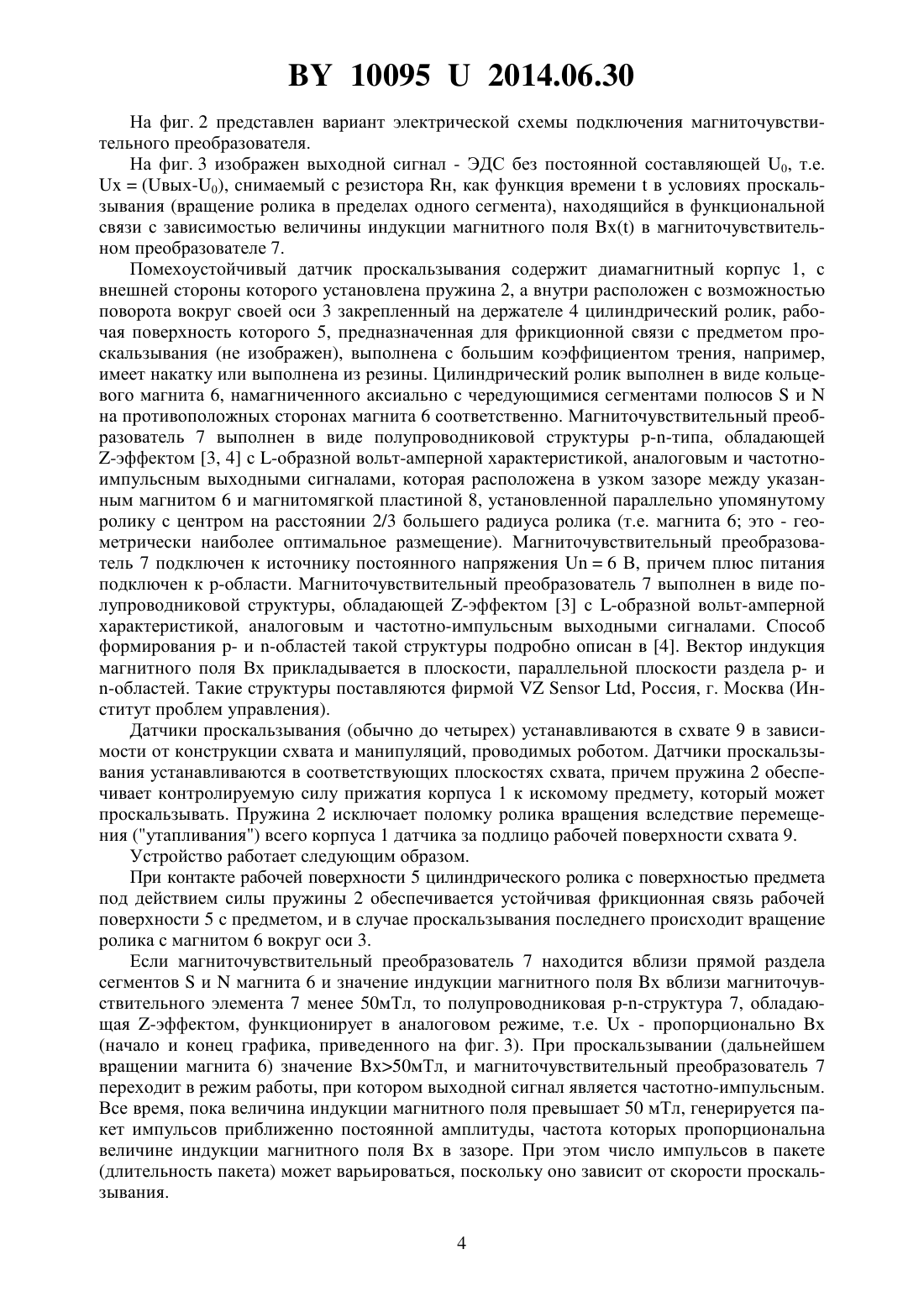
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский государственный университет(72) Автор Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) Помехоустойчивый датчик проскальзывания, содержащий диамагнитный корпус, с внешней стороны которого установлена пружина, а внутри расположен с возможностью поворота вокруг своей оси цилиндрический ролик, рабочая поверхность которого, предназначенная для фрикционной связи с предметом проскальзывания, выполнена с большим коэффициентом трения, например, имеет накатку или выполнена из резины, а в отверстии корпуса в непосредственной близости от ролика установлен магниточувствительный преобразователь, отличающийся тем, что цилиндрический ролик выполнен в виде кольцевого магнита, намагниченного аксиально с чередующимися сегментами полюсовина противоположных сторонах магнита соответственно, а магниточувствительный преобразователь выполнен в виде полупроводниковой структуры типа, обладающей -эффектом с -образной вольт-амперной характеристикой, аналоговым и частотно-импульсным выходными сигналами, которая расположена в узком зазоре между указанным роликом и магнитомягкой пластиной, установленной параллельно упомянутому ролику с центром на расстоянии 2/3 большего радиуса ролика, а источник питающего напряжения магниточувствительного преобразователя выполнен с функцией постоянной ЭДС, причем плюс питания подключен к -области.(56) 1. А.с. СССР 1415856, МПК 07 7/00, 1980. 2. А.с. СССР 1546833, МПК 01 7/0025 15/02, 1990 (прототип). 3. Бараночников М.Л. Микромагнитоэлектроника. Т. 1. - М. ДМК Пресс, 2001. - 544 с. 4. А.с. СССР 1739402, МПК 01 29/06, 1992. Заявляемая полезная модель Помехоустойчивый датчик проскальзывания относится к робототехнике и может быть использована для контроля проскальзывания предмета, зажатого в схвате робота, с целью управления усилием сжатия робота. Известен прецизионный датчик проскальзывания 1, функционирующий на эффекте Холла. Он содержит цилиндрический ролик, цилиндрическая поверхность которого, предназначенная для фрикционной связи с предметом проскальзывания, выполнена с большим коэффициентом трения, например, имеет накатку или выполнена из резины. Ролик выполнен из ферромагнитной и неферромагнитной частей, имеющих в сечении, проходящем через ось сечения ролика, вид прямоугольных треугольников. Ролик расположен в зазоре между полюсами магнитопровода, выполненного в виде С-образного магнита. В зазоре между одним из полюсов магнита и торцом цилиндрического ролика размещен магниточувствительный преобразователь, например датчик Холла, с помощью которого контролируется угловое положение ролика, зависящее от величины проскальзывания. Для увеличения чувствительности высота ролика может быть равна его диаметру. При вращении (повороте) ролика происходит изменение магнитного сопротивления расположенного в зазоре Собразного магнита - участка ролика, благодаря чему обеспечивается близкая к гармонической функция преобразования углового положения ролика в электрический сигнал. Это устройство обладает повышенными габаритами и низкой помехоустойчивостью в связи с недостаточно высоким уровнем выходного аналогового сигнала, величина которого составляет обычно десятки милливольт для среднестатистических датчиков Холла (а не Вольты). Поэтому требуется использование усилителя аналогового сигнала, на который влияют внешние электромагнитные поля рассеяния. Недостатком устройства является достаточно высокое энергопотребление, связанное с тем, что датчик Холла должен постоянно запитываться током величиной (10-30) мА, что приводит к значительному энергопотреблению, а отсутствие механизма контролируемого сжатия датчика при соприкосновении с предметом проскальзывания может вызвать изгиб оси вращения цилиндрического ролика или даже его поломку. Наиболее близким по технической реализации к предлагаемому решению является датчик, регистрирующий скольжение предмета, приведенный в 2 (прототип). Датчики от одного до четырех в зависимости от конструкции схвата и манипуляций, проводимых роботом с предметом, устанавливаются в соответствующих плоскостях схвата и содержат пружину, обеспечивающую контролируемую силу прижатия датчика к искомому предмету,исключающую поломку ролика вращения, вследствие перемещения (утопления) всего корпуса датчика за подлицо рабочей поверхности схвата. Датчик, регистрирующий скольжение предмета, содержит корпус, в котором расположен с возможностью поворота вокруг своей оси цилиндрический ролик, и магнитную систему, выполненную в виде двух постоянных магнитов, один из которых установлен в отверстии ролика, проходящем через один из его диаметров, а другой неподвижно закреплен на корпусе и снабжен концентратором магнитного поля. При скольжении в схвате робота предмет поворачивает ролик датчика, что вызывает появление в преобразователе Холла, расположенном на вершине концентратора, обращенной к боковой поверхности ролика, электрического сигнала, характеризующего смещение предмета в схвате. Приведены математические соотношения геометрических параметров концентраторов магнитного поля, выполненных в виде сегмента эллипсоида вращения и сегмента двуполостного гиперболоида вращения. По разности величин сигналов, возникающих на датчике Холла до поворота и после поворота ролика, судят 2 100952014.06.30 о степени смещения предмета в схвате. Соответствующим образом, запрограммировав компьютер на величину разностного сигнала, можно управлять усилием сжатия схвата робота. Тем не менее описанное устройство (прототип) обладает повышенными габаритами и низкой помехоустойчивостью в связи с недостаточно высоким уровнем выходного аналогового сигнала, величина которого составляет порядка сотни милливольт для среднестатистических датчиков Холла. Поэтому требуется использование усилителя аналогового сигнала. Существенным недостатком устройства 2 является наличие избыточных габаритов вследствие применения концентратора магнитного поля с магнитом, что приводит к увеличению магнитной массы. Снижение материалоемкости магнитов, которые в настоящее время стоят достаточно дорого, также представляется актуальной задачей. Задачей, решаемой в настоящей полезной модели, является повышение помехоустойчивости при одновременном снижении материалоемкости магнитной массы. Помехоустойчивый датчик проскальзывания содержит диамагнитный корпус, с внешней стороны которого установлена пружина, а внутри расположен с возможностью поворота вокруг своей оси цилиндрический ролик, рабочая поверхность которого, предназначенная для фрикционной связи с предметом проскальзывания, выполнена с большим коэффициентом трения, например, имеет накатку или выполнена из резины, а в отверстии корпуса в непосредственной близости от ролика установлен магниточувствительный преобразователь. Он отличается тем, что цилиндрический ролик выполнен в виде кольцевого магнита,намагниченного аксиально с чередующимися сегментами полюсовина противоположных сторонах магнита соответственно, а магниточувствительный преобразователь выполнен в виде полупроводниковой структуры типа, обладающей -эффектом 3, 4 с-обратной вольт-амперной характеристикой, аналоговым и частотно-импульсным выходными сигналами, которая расположена в узком зазоре между указанным роликом и магнитомягкой пластиной, установленной параллельно упомянутому ролику с центром на расстоянии 2/3 большего радиуса ролика, а источник питающего напряжения магниточувствительного преобразователя выполнен с функцией постоянной ЭДС, причем плюс питания подключен к -области. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению помехоустойчивости при одновременном снижении материалоемкости магнита. Решение поставленной комплексной задачи достигается следующими путями. В предложенном устройстве исключение из конструкции 2 магнита с концентратором магнитного поля повышает эффективность использования магнитной массы и приводит к снижению материалоемкости. Генерация импульсного выходного сигнала достаточно высокой амплитуды позволяет устройству функционировать без усилителей и значительно повышает помехоустойчивость устройства в целом. Проведенный анализ уровня техники позволил установить, что заявителем не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемого устройства, а выделение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле полезной модели. Таким образом, комплексный анализ изложенных отличительных признаков конструкции датчика проскальзывания показывает, что они являются существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых в совокупности обеспечивают решение поставленной комплексной задачи в заявляемой полезной модели, следовательно, можно сделать вывод о соответствии заявляемого датчика проскальзывания условию патентоспособности новизна. Заявляемая полезная модель поясняется фиг. 1-3. На фиг. 1 изображено устройство в разрезе перпендикулярно оси вращения ролика (на примере 4-х намагниченных сегментов). 3 100952014.06.30 На фиг. 2 представлен вариант электрической схемы подключения магниточувствительного преобразователя. На фиг. 3 изображен выходной сигнал - ЭДС без постоянной составляющей 0, т.е.(вых-0), снимаемый с резистора н, как функция временив условиях проскальзывания (вращение ролика в пределах одного сегмента), находящийся в функциональной связи с зависимостью величины индукции магнитного поля х в магниточувствительном преобразователе 7. Помехоустойчивый датчик проскальзывания содержит диамагнитный корпус 1, с внешней стороны которого установлена пружина 2, а внутри расположен с возможностью поворота вокруг своей оси 3 закрепленный на держателе 4 цилиндрический ролик, рабочая поверхность которого 5, предназначенная для фрикционной связи с предметом проскальзывания (не изображен), выполнена с большим коэффициентом трения, например,имеет накатку или выполнена из резины. Цилиндрический ролик выполнен в виде кольцевого магнита 6, намагниченного аксиально с чередующимися сегментами полюсовина противоположных сторонах магнита 6 соответственно. Магниточувствительный преобразователь 7 выполнен в виде полупроводниковой структуры типа, обладающей-эффектом 3, 4 с -образной вольт-амперной характеристикой, аналоговым и частотноимпульсным выходными сигналами, которая расположена в узком зазоре между указанным магнитом 6 и магнитомягкой пластиной 8, установленной параллельно упомянутому ролику с центром на расстоянии 2/3 большего радиуса ролика (т.е. магнита 6 это - геометрически наиболее оптимальное размещение). Магниточувствительный преобразователь 7 подключен к источнику постоянного напряжения 6 В, причем плюс питания подключен к -области. Магниточувствительный преобразователь 7 выполнен в виде полупроводниковой структуры, обладающей -эффектом 3 с -образной вольт-амперной характеристикой, аналоговым и частотно-импульсным выходными сигналами. Способ формирования - и -областей такой структуры подробно описан в 4. Вектор индукция магнитного поля Вх прикладывается в плоскости, параллельной плоскости раздела - и-областей. Такие структуры поставляются фирмой, Россия, г. Москва (Институт проблем управления). Датчики проскальзывания (обычно до четырех) устанавливаются в схвате 9 в зависимости от конструкции схвата и манипуляций, проводимых роботом. Датчики проскальзывания устанавливаются в соответствующих плоскостях схвата, причем пружина 2 обеспечивает контролируемую силу прижатия корпуса 1 к искомому предмету, который может проскальзывать. Пружина 2 исключает поломку ролика вращения вследствие перемещения (утапливания) всего корпуса 1 датчика за подлицо рабочей поверхности схвата 9. Устройство работает следующим образом. При контакте рабочей поверхности 5 цилиндрического ролика с поверхностью предмета под действием силы пружины 2 обеспечивается устойчивая фрикционная связь рабочей поверхности 5 с предметом, и в случае проскальзывания последнего происходит вращение ролика с магнитом 6 вокруг оси 3. Если магниточувствительный преобразователь 7 находится вблизи прямой раздела сегментовимагнита 6 и значение индукции магнитного поля х вблизи магниточувствительного элемента 7 менее 50 мТл, то полупроводниковая структура 7, обладающая -эффектом, функционирует в аналоговом режиме, т.е. х - пропорционально х(начало и конец графика, приведенного на фиг. 3). При проскальзывании (дальнейшем вращении магнита 6) значение х 50 мТл, и магниточувствительный преобразователь 7 переходит в режим работы, при котором выходной сигнал является частотно-импульсным. Все время, пока величина индукции магнитного поля превышает 50 мТл, генерируется пакет импульсов приближенно постоянной амплитуды, частота которых пропорциональна величине индукции магнитного поля х в зазоре. При этом число импульсов в пакете(длительность пакета) может варьироваться, поскольку оно зависит от скорости проскальзывания. 4 100952014.06.30 Следует отметить, что явление управляемой скачковой проводимости (-эффект) возникает в структурах с -образной вольт-амперной характеристикой и заключается в том,что при определенных значениях питающего напряжения и внешнего магнитного поля проводимость полупроводниковой структуры (в прямом направлении) и, соответственно,амплитуда протекающего через нее тока меняются скачком со временем переходного процесса 1-5 мкс. Изменение проводимости, подобно структурам с -образной вольт-амперной характеристикой, сопровождается возникновением шнура тока, но с иными физическими свойствами, основным из которых является постоянство плотности тока в шнуре при изменении напряжения на структуре. Основной особенностью магниточувствительного преобразователя 7 является способность не только воспринимать внешнее магнитное поле, но и производить его преобразование на молекулярном уровне в объеме кристалла без дополнительных электронных схем. Таким образом, решение поставленной задачи по повышению помехоустойчивости достигается тем, что в предложенном устройстве вследствие применения магниточувствительного преобразователя с -эффектом генерируется помехозащищенный частотноимпульсный выходной сигнал высокой амплитуды (50 от напряжения питания) без применения электронных схем преобразования. Следовательно, обработка процессором выходных сигналов от всех датчиков проскальзывания позволяет получить достоверную информацию об определении статичности положения предмета относительно схвата робота, что позволяет управлять усилием сжатия схвата робота. Следовательно, решена задача по повышению помехоустойчивости функционирования устройства при одновременном снижении материалоемкости магнитов. Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемый помехоустойчивый датчик проскальзывания соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: B25J 15/02, G01B 7/00
Метки: датчик, помехоустойчивый, проскальзывания
Код ссылки
<a href="https://by.patents.su/5-u10095-pomehoustojjchivyjj-datchik-proskalzyvaniya.html" rel="bookmark" title="База патентов Беларуси">Помехоустойчивый датчик проскальзывания</a>
Датчик проскальзывания
Номер патента: U 8540
Опубликовано: 30.08.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
МПК: B25J 15/02, G01B 7/00
Метки: датчик, проскальзывания
Текст:
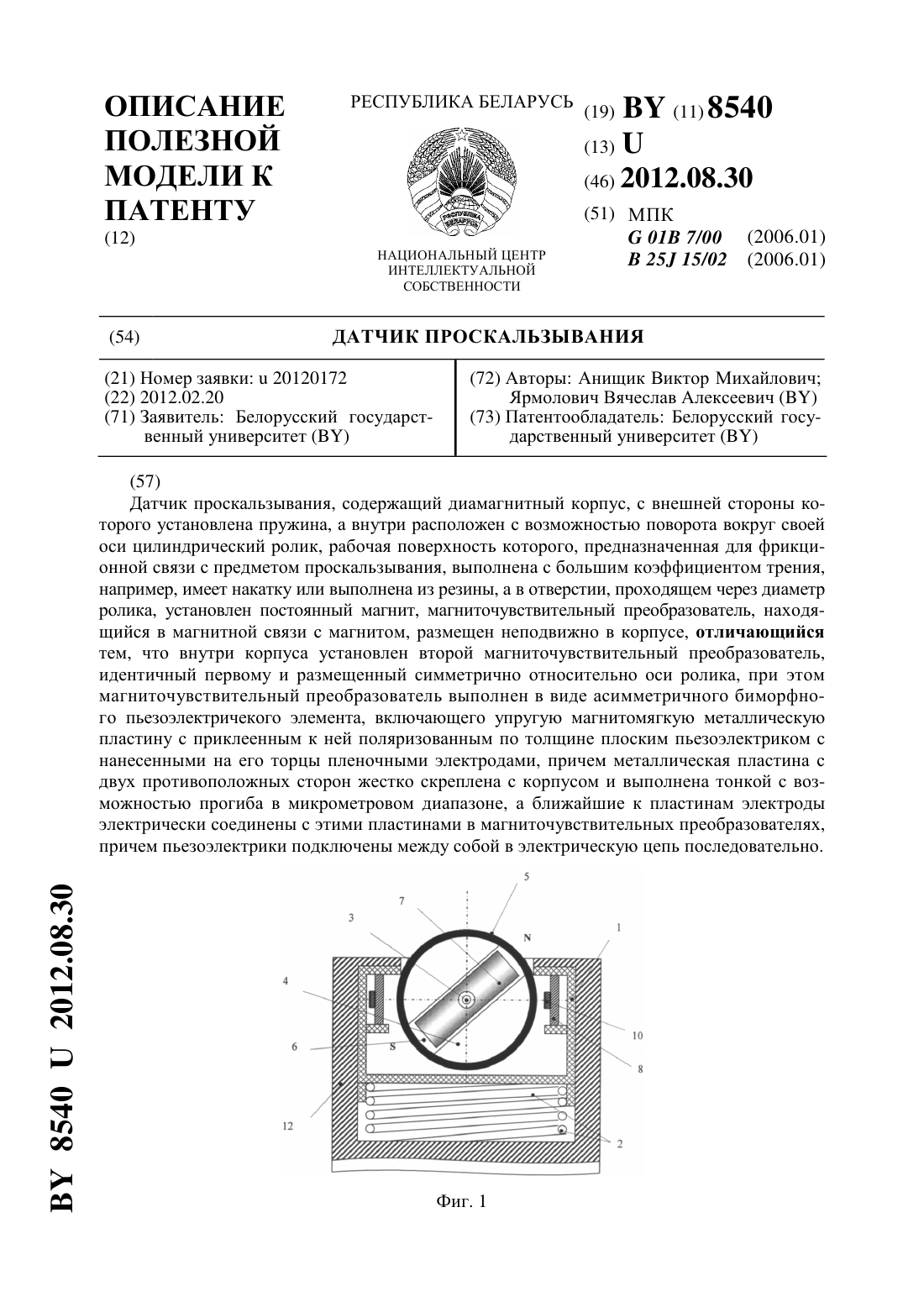
...оси ролика, при этом магниточувствительный преобразователь выполнен в виде асимметричного биморфного пьезоэлектричекого элемента 3, включающего упругую магнитомягкую металлическую пластину с приклеенным к ней поляризованным по толщине плоским пьезоэлектриком с нанесенными на его торцы пленочными электродами, причем металлическая пластина с двух противоположных сторон жестко скреплена с корпусом и выполнена тонкой с возможностью...
Помехоустойчивый датчик износа тормозных накладок автомобиля
Номер патента: U 9160
Опубликовано: 30.04.2013
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: F16D 66/00
Метки: автомобиля, помехоустойчивый, износа, датчик, тормозных, накладок
Текст:
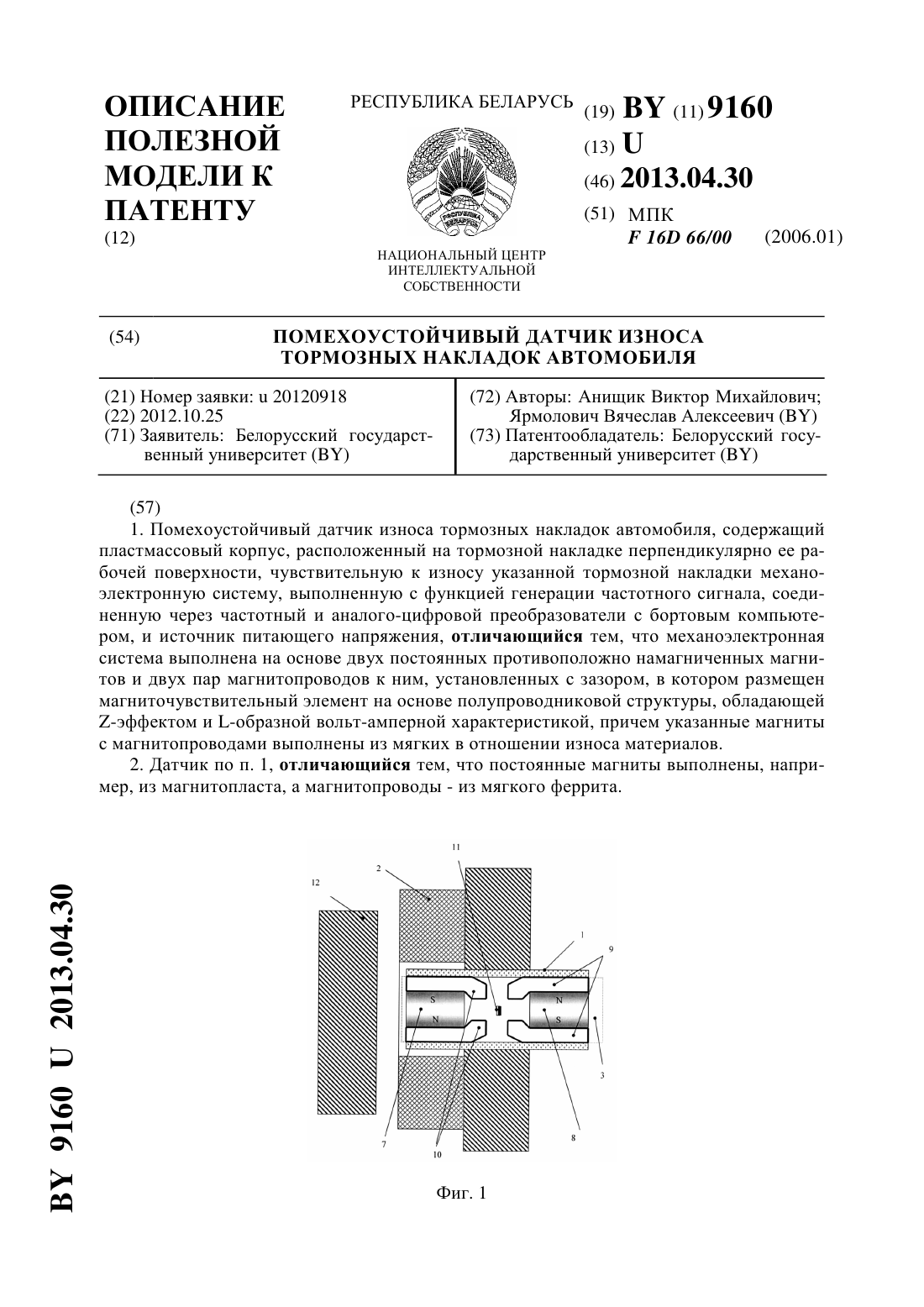
...не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемой полезной модели, а определение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле полезной модели. Следовательно, комплексный анализ изложенных отличительных признаков конструкции датчика...
Устройство для контроля проскальзывания каната подъёмника
Номер патента: 17885
Опубликовано: 30.12.2013
Автор: Годзданкер Соломон Борисович
МПК: B66B 5/02
Метки: контроля, подъёмника, каната, проскальзывания, устройство
Текст:
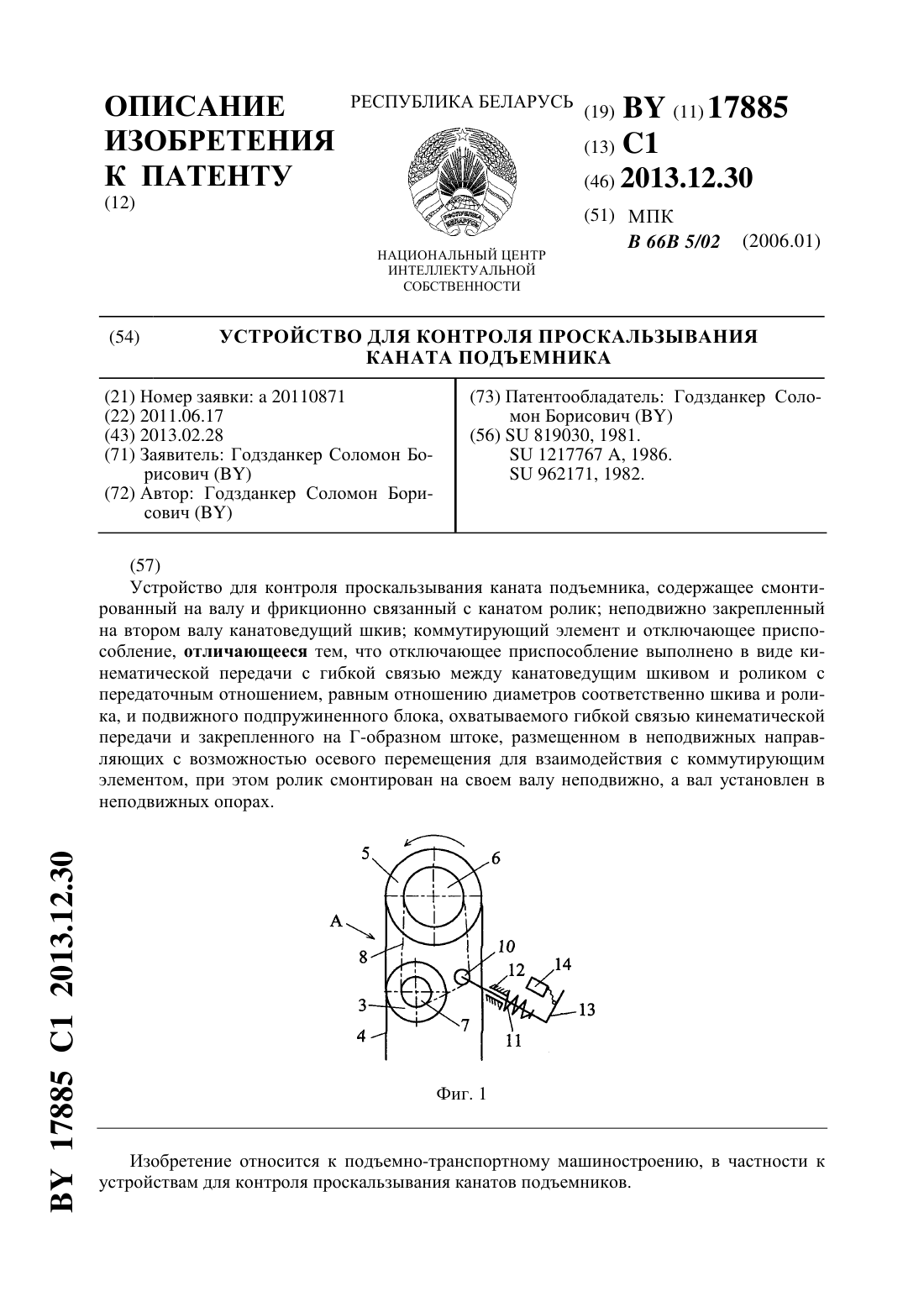
...элемент и отключающее приспособление, согласно изобретению,отключающее приспособление выполнено в виде кинематической передачи с гибкой связью между канатоведущим шкивом и роликом с передаточным отношением, равным отношению диаметров соответственно шкива и ролика, и подвижного подпружиненного блока, охватываемого гибкой связью кинематической передачи и закрепленного на Г-образном штоке, размещенном в неподвижных направляющих с...
Индукционный датчик
Номер патента: U 705
Опубликовано: 30.12.2002
Авторы: Минченя Владимир Тимофеевич, Минченя Николай Тимофеевич, Карпович Сергей Леонидович
МПК: G01R 33/02
Метки: индукционный, датчик
Текст:
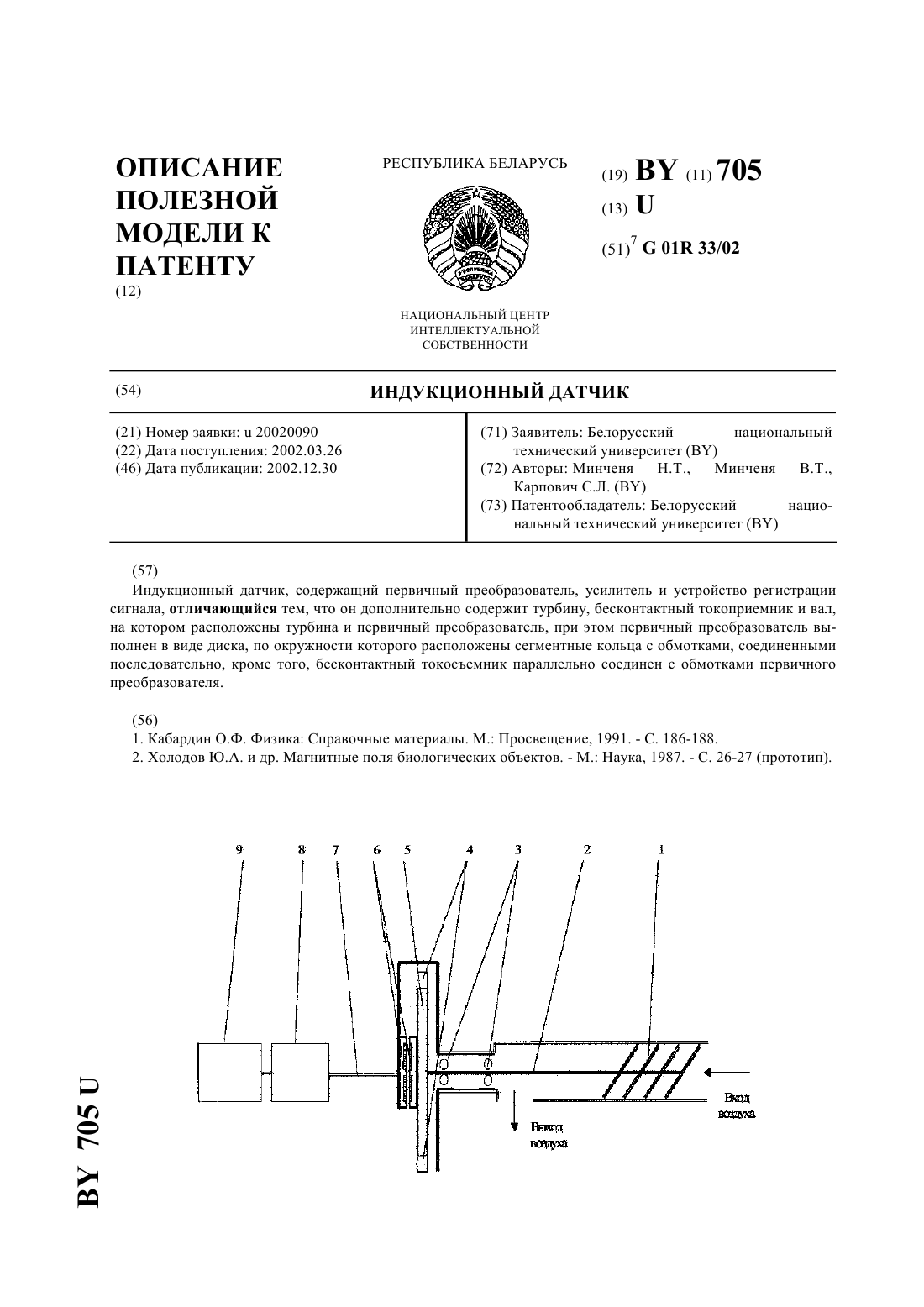
...полезной модели заключается в том, что индукционный датчик, содержащий первичный преобразователь, усилитель и устройство регистрации сигнала, дополнительно содержит турбину, бесконтактный токосъемник и вал, на котором расположены турбина и первичный преобразователь, при этом первичный преобразователь выполнен в виде диска, по окружности которого расположены сегментные кольца с обмотками, соединенными последовательно, кроме того,...
Датчик перемещения для гидравлических систем
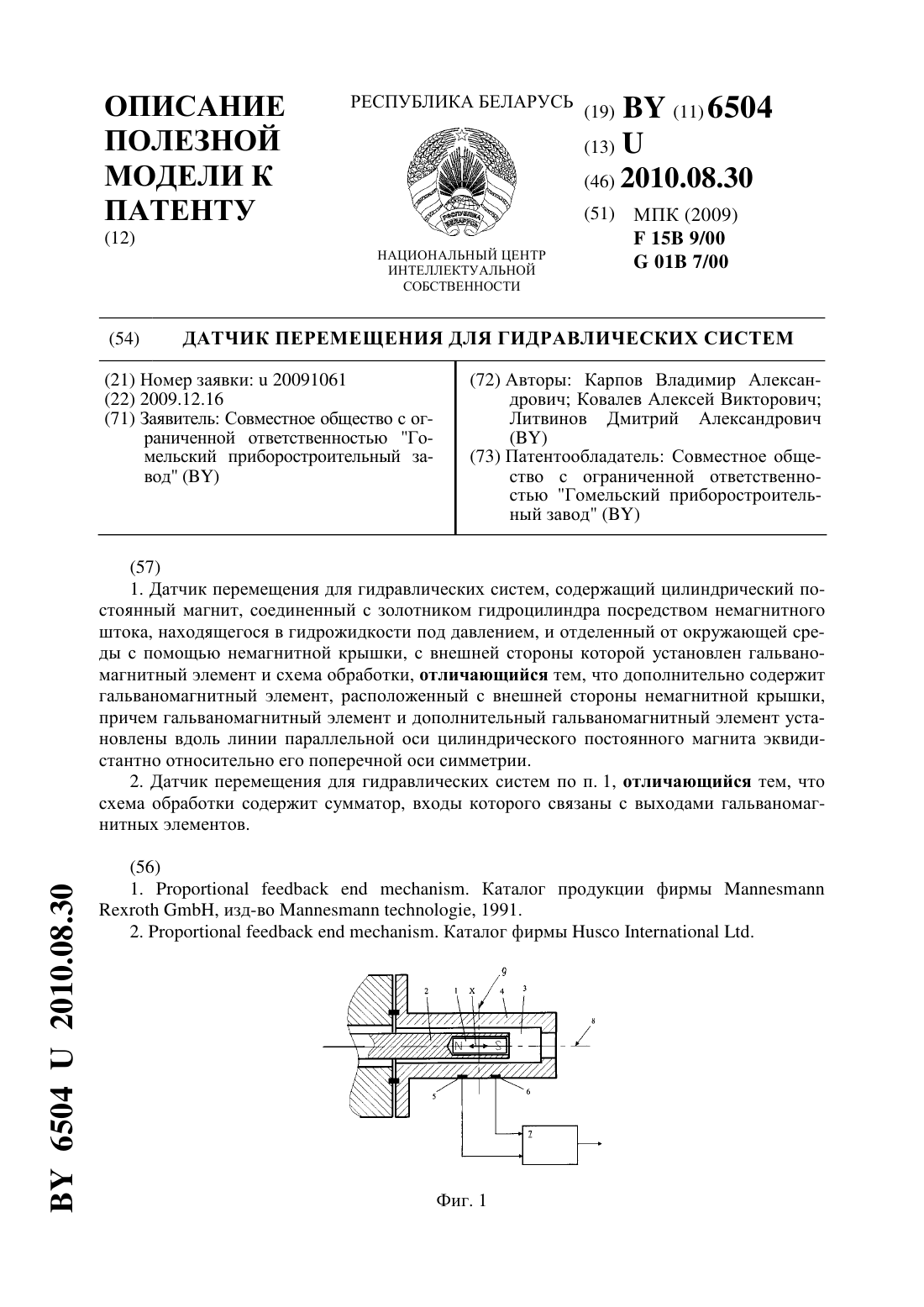
Номер патента: U 6504
Опубликовано: 30.08.2010
Авторы: Литвинов Дмитрий Александрович, Карпов Владимир Александрович, Ковалев Алексей Викторович
Метки: гидравлических, систем, перемещения, датчик
Текст:
...перемещения в предпочтительных формах его реализации схема обработки содержит сумматор, входы которого связаны с выходами обоих гальваномагнитных элементов. Заявляемый датчик перемещения для гидравлических систем более подробно будет рассмотрен ниже на одном из возможных, но не ограничивающих примеров его реализации со ссылками на позиции фигур чертежей, на которых схематично представлены фиг. 1 - функциональная схема заявляемого датчика...