Тактильный сенсор
Текст
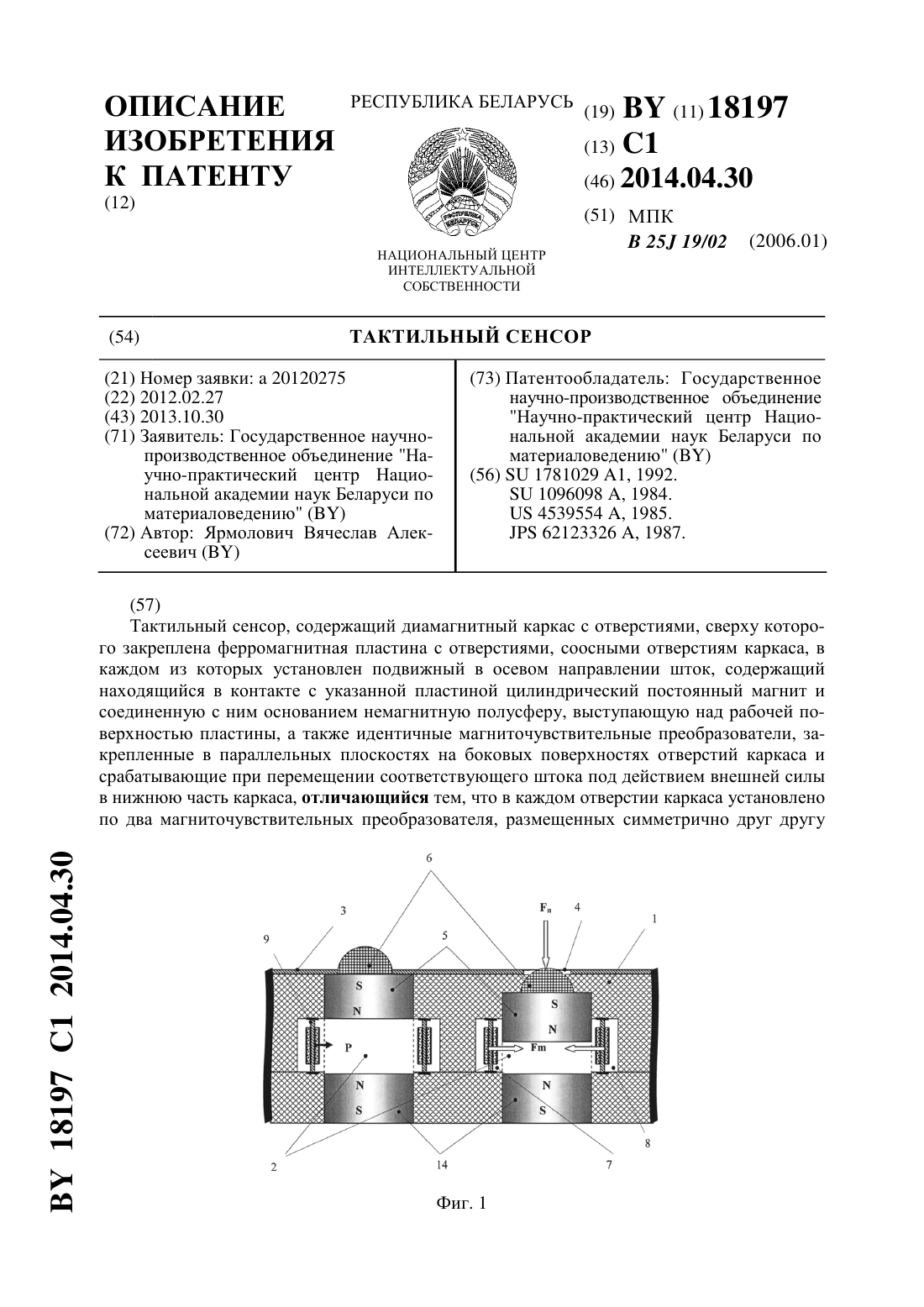
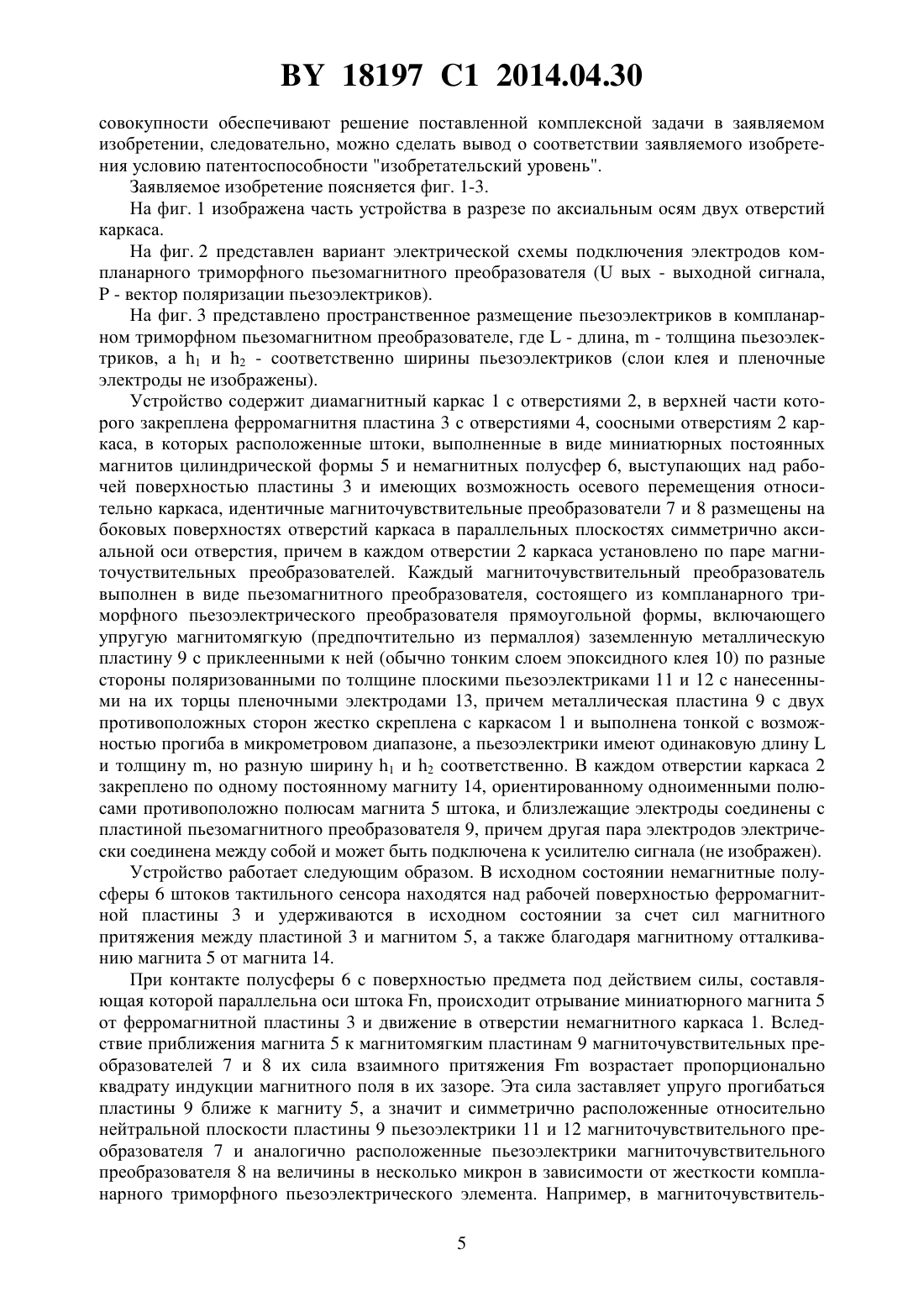
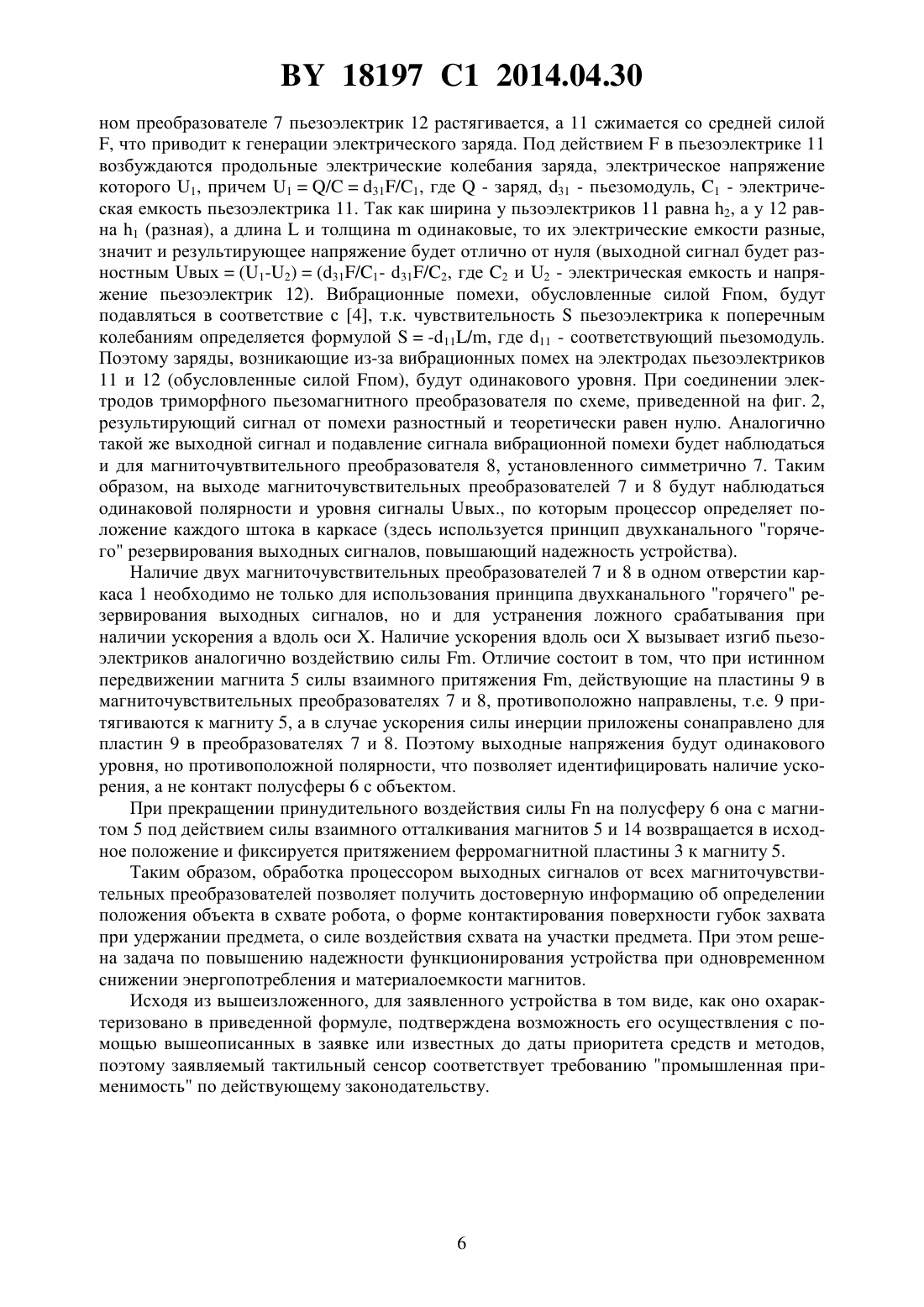
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Государственное научнопроизводственное объединение Научно-практический центр Национальной академии наук Беларуси по материаловедению(72) Автор Ярмолович Вячеслав Алексеевич(73) Патентообладатель Государственное научно-производственное объединение Научно-практический центр Национальной академии наук Беларуси по материаловедению(57) Тактильный сенсор, содержащий диамагнитный каркас с отверстиями, сверху которого закреплена ферромагнитная пластина с отверстиями, соосными отверстиям каркаса, в каждом из которых установлен подвижный в осевом направлении шток, содержащий находящийся в контакте с указанной пластиной цилиндрический постоянный магнит и соединенную с ним основанием немагнитную полусферу, выступающую над рабочей поверхностью пластины, а также идентичные магниточувствительные преобразователи, закрепленные в параллельных плоскостях на боковых поверхностях отверстий каркаса и срабатывающие при перемещении соответствующего штока под действием внешней силы в нижнюю часть каркаса, отличающийся тем, что в каждом отверстии каркаса установлено по два магниточувствительных преобразователя, размещенных симметрично друг другу 18197 1 2014.04.30 относительно оси отверстия, и по одному дополнительному магниту, ориентированному противоположно магниту штока для его выталкивания в верхнюю часть каркаса при прекращении действия внешней силы, каждый магниточувствительный преобразователь выполнен в виде прямоугольного компланарного триморфного пьезомагнитного преобразователя, содержащего тонкую упругую магнитомягкую заземленную металлическую пластину с приклеенными к ее противоположным сторонам поляризованными по толщине плоскими пьезоэлектриками равной длины и толщины и различной ширины, на каждый из торцов которых нанесен пленочный электрод, при этом каждая из указанных металлических пластин жестко скреплена с каркасом двумя противоположными торцами с возможностью прогиба в микрометровом диапазоне и соединена с ближайшими друг к другу электродами своего преобразователя, электроды другой пары которого электрически соединены друг с другом. Заявляемое изобретение относится к робототехнике, в том числе для автономных роботов, и может быть использовано для получения информации об определении положения объекта в схвате робота, о форме контактирования поверхности губок захвата при удержании предмета, о силе воздействия схвата на участки предмета. Из уровня техники известен тактильный пьезоэлектрический сенсор 1, предназначенный для использования в автономных роботах для выявления в схвате острых кромок,распознавания фигур и предметов, таких как квадрат, трапеция, равнобедренный треугольник, круг, тороид, профилированный винт, крест, прорези, винтовые формы. Он содержит пьезоэлектрические элементы на основе полимерной пленки поливинилиденфторида, сформированные на монолитной пластине кремния по интегральной технологии. Интегральная микросхема включает 64 одинаковых элемента с электродами, которые расположены симметрично в матрице 88 и соеденены со смежными электронными усилителями сигналов. Данный тактильный сенсор функционирует при линейных нагрузках непосредственно на пьезоэлектрические элементы в диапазоне сил от 0,8 до 135 грамм-силы. Недостатками этого устройства являются низкая надежность и долговечность в работе,поскольку пьезоэлектрические элементы подвержены прямому силовому воздействию с неконтролируемыми нагрузками, которые могут превышать предельно допустимые нормы(например для острых кромок) и вызвать разрушения пьезоэлектрических элементов. Известен также тактильный датчик (сенсор) 2, выполненный в виде матрицы элементов, функционирующих на эффекте Холла. Он содержит каркас с магнитной системой,матрицу элементов Холла и расположенные на его рабочей поверхности стержни, имеющие возможность осевого перемещения относительно каркаса. Магнитная система выполнена в виде двух ферромагнитных пластин, установленных с зазором параллельно друг другу, двух постоянных магнитов, направленных одноименными полюсами в одну сторону и расположенных в зазоре между пластинами. Стержни выполнены из ферромагнитного материала, установлены в каркасе из неферромагнитного материала, в каркасе и одной из пластин сделаны соосные отверстия, причем стержни являются подпружиненными относительно каркаса. Регистрация сигналов производится матрицей элементов Холла, расположенных на второй пластине в зазоре между этой пластиной и каркасом при перемещении стержней в магнитной системе. Это устройство имеет недостаточную надежность определения процесса контактирования с поверхностью предмета произвольной формы, например, в условиях проскальзывания. Так, из-за того что выступающие на поверхность стержни имеют цилиндрическую форму,в случае контактирования с предметом сложной формы возможно не только утапливание стержней, но и их изгиб при тангенциальных относительно пластины сенсора усилиях. Последнее имеет место при проскальзывании предмета. Кроме того, предмет острыми частями, например углом, может цепляться за выступающие стержни. Силовые воздействия 2 18197 1 2014.04.30 на стержни могут приводить к заклиниванию последних, изменению рабочих характеристик тактильного сенсора. Вторым главным недостатком устройства является достаточно высокое энергопотребление, связанное с тем, что каждый элемент Холла должен запитываться током величиной 10-30 мА, что при большом количестве элементов Холла в матрице приводит к значительному энергопотреблению. Элементы Холла должны подключаться к источнику ЭДС только параллельно (но не последовательно), чтобы исключить возможность одновременного отказа функционирования всей матрицы элементов Холла при поломке одного из элементов Холла. Наиболее близким по технической реализации к предлагаемому решению является тактильный сенсор, приведенный в 3 (прототип). Устройство содержит каркас с магнитной системой, расположенные на его рабочей поверхности штоки, имеющие возможность осевого перемещения относительно каркаса, и магниточувствительные преобразователи,выполненные из тонких пленок магнитомягкого материала, например пермаллоя, функционирующие на планарном эффекте Холла. Магниточувствительные преобразователи расположены в плоскостях, проходящих через оси симметрии плоского магнита и каждого из штоков. Магнитная система выполнена в виде плоского магнита и ферромагнитной пластины, расположенных параллельно друг другу с зазором, при этом штоки выполнены в виде постоянных миниатюрных магнитов, обращенных одноименными полюсами к аналогичному полюсу плоского магнита. На штоках закреплены неферромагнитные части в виде полусфер, выступающих над пластиной, в которой выполнены отверстия, соосные с отверстиями каркаса и в которых размещены штоки. Устройство работает следующим образом. При контакте штока (немагнитной полусферы) с поверхностью предмета под действием силы, составляющая которой параллельна оси штока, происходит отрывание миниатюрного магнита от ферромагнитной пластины и движение в отверстии немагнитного каркаса. По ЭДС электрических сигналов от магниточувствительных преобразователей судят о величинах перемещений штоков в каркасе,следовательно, о контактировании поверхности губок захвата при удержании предмета и силе воздействия схвата на участки предмета. После прекращения силового воздействия на предмет штоки возвращаются в исходное состояние благодаря силам отталкивания миниатюрных магнитов от плоского магнита и фиксируются притяжением ферромагнитной пластины к миниатюрным магнитам, что придает устойчивость сенсору при ускорении,случайных толчках и тряске. Тем не менее описанное устройство (прототип) обладает повышенными габаритами и низкой надежностью в связи с недостаточно высоким уровнем выходных сигналов, величины которых составляют менее десяти милливольт для среднестатистических элементов,функционирующих на планарном эффекте Холла. Поэтому требуется использование усилителей сигналов, а также, естественно, источников питающих напряжений. Вторым недостатком прототипа 3 является, как и в 2, повышенное энергопотребление вследствие тех же причин, которые были приведены выше. Последнее особенно необходимо в случае энергопотребления от аккумуляторов при использовании устройств в автономных роботах. Третьим недостатком устройства 3 является наличие избыточной магнитной массы,вследствие применения массивного плоского магнита. Снижение материалоемкости магнитов, которые в настоящее время стоят достаточно дорого, также представляется актуальной задачей. Задачей, решаемой в настоящем изобретении, является повышение надежности при одновременном снижении энергопотребления устройства и материалоемкости магнитов. Тактильный сенсор содержит диамагнитный каркас с отверстиями, сверху которого закреплена ферромагнитная пластина с отверстиями, соосными отверстиям каркаса, в каждом из которых установлен подвижный в осевом направлении шток, содержащий 3 18197 1 2014.04.30 находящийся в контакте с указанной пластиной цилиндрический постоянный магнит и соединенную с ним основанием немагнитную полусферу, выступающую над рабочей поверхностью пластины, а также идентичные магниточувствительные преобразователи, закрепленные в параллельных плоскостях на боковых поверхностях отверстий каркаса и срабатывающие при перемещении соответствующего штока под действием внешней силы в нижнюю часть каркаса. Он отличается тем, что в каждом отверстии каркаса установлено по два магниточувствительных преобразователя, размещенных симметрично друг другу относительно оси отверстия, и по одному дополнительному магниту, ориентированному противоположно магниту штока для его выталкивания в верхнюю часть каркаса при прекращении действия внешней силы, каждый магниточувствительный преобразователь выполнен в виде прямоугольного компланарного триморфного пьезомагнитного преобразователя, содержащего тонкую упругую магнитомягкую заземленную металлическую пластину с приклеенными к ее противоположным сторонам поляризованными по толщине плоскими пьезоэлектриками равной длины и толщины и различной ширины, на каждый из торцов которых нанесен пленочный электрод, при этом каждая из указанных металлических пластин жестко скреплена с каркасом двумя противоположными торцами с возможностью прогиба в микрометровом диапазоне и соединена с ближайшими друг к другу электродами своего преобразователя, электроды другой пары которого электрически соединены друг с другом. По мнению авторов, тактильный сенсор содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению надежности при одновременном снижении энергопотребления устройства и материалоемкости магнитов. Следовательно, заявляемое изобретение соответствует критерию новизна. Решение поставленной комплексной задачи достигается следующими путями. В предложенном устройстве магниточувствительные преобразователи, выполненные в виде пьезомагнитных преобразователей, имеют значительно более высокие уровни выходного сигнала по сравнению с прототипом (вольты без усиления), что повышает надежность передачи сигнала. Кроме того, по сравнению с прототипом не требуется электрических источников питания для магниточувствительных преобразователей, потому что пьезоэлектрики сами генерируют выходной заряд, что и обеспечивает значительное снижение энергопотребления устройства в целом. Замена целостного плоского магнита, используемого в конструкции устройства 3, на матрицу отдельных магнитов повышает эффективность использования магнитной массы и приводит к снижению материалоемкости магнитов. Размещение двух магниточувствительных элементов (вместо одного) в каждом отверстии каркаса может показаться избыточным, однако такое техническое решение соответствует современному принципу двухканального горячего резервирования выходных сигналов на случай отказа одного из первичных чувствительных элементов, тем более что это не приводит к увеличению энергопотребления. Принцип двухканального горячего резервирования широко используется в космической и военной технике и обеспечивает повышение надежности устройств. Проведенный анализ уровня техники позволил установить, что заявителем не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемого изобретения, а определение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле изобретения. Таким образом, комплексный анализ изложенных отличительных признаков конструкции тактильного сенсора показывает, что они являются существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых в 4 18197 1 2014.04.30 совокупности обеспечивают решение поставленной комплексной задачи в заявляемом изобретении, следовательно, можно сделать вывод о соответствии заявляемого изобретения условию патентоспособности изобретательский уровень. Заявляемое изобретение поясняется фиг. 1-3. На фиг. 1 изображена часть устройства в разрезе по аксиальным осям двух отверстий каркаса. На фиг. 2 представлен вариант электрической схемы подключения электродов компланарного триморфного пьезомагнитного преобразователя ( вых - выходной сигнала, - вектор поляризации пьезоэлектриков). На фиг. 3 представлено пространственное размещение пьезоэлектриков в компланарном триморфном пьезомагнитном преобразователе, где- длина,- толщина пьезоэлектриков, а 1 и 2 - соответственно ширины пьезоэлектриков (слои клея и пленочные электроды не изображены). Устройство содержит диамагнитный каркас 1 с отверстиями 2, в верхней части которого закреплена ферромагнитня пластина 3 с отверстиями 4, соосными отверстиям 2 каркаса, в которых расположенные штоки, выполненные в виде миниатюрных постоянных магнитов цилиндрической формы 5 и немагнитных полусфер 6, выступающих над рабочей поверхностью пластины 3 и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи 7 и 8 размещены на боковых поверхностях отверстий каркаса в параллельных плоскостях симметрично аксиальной оси отверстия, причем в каждом отверстии 2 каркаса установлено по паре магниточуствительных преобразователей. Каждый магниточувствительный преобразователь выполнен в виде пьезомагнитного преобразователя, состоящего из компланарного триморфного пьезоэлектрического преобразователя прямоугольной формы, включающего упругую магнитомягкую (предпочтительно из пермаллоя) заземленную металлическую пластину 9 с приклеенными к ней (обычно тонким слоем эпоксидного клея 10) по разные стороны поляризованными по толщине плоскими пьезоэлектриками 11 и 12 с нанесенными на их торцы пленочными электродами 13, причем металлическая пластина 9 с двух противоположных сторон жестко скреплена с каркасом 1 и выполнена тонкой с возможностью прогиба в микрометровом диапазоне, а пьезоэлектрики имеют одинаковую длинуи толщину , но разную ширину 1 и 2 соответственно. В каждом отверстии каркаса 2 закреплено по одному постоянному магниту 14, ориентированному одноименными полюсами противоположно полюсам магнита 5 штока, и близлежащие электроды соединены с пластиной пьезомагнитного преобразователя 9, причем другая пара электродов электрически соединена между собой и может быть подключена к усилителю сигнала (не изображен). Устройство работает следующим образом. В исходном состоянии немагнитные полусферы 6 штоков тактильного сенсора находятся над рабочей поверхностью ферромагнитной пластины 3 и удерживаются в исходном состоянии за счет сил магнитного притяжения между пластиной 3 и магнитом 5, а также благодаря магнитному отталкиванию магнита 5 от магнита 14. При контакте полусферы 6 с поверхностью предмета под действием силы, составляющая которой параллельна оси штока , происходит отрывание миниатюрного магнита 5 от ферромагнитной пластины 3 и движение в отверстии немагнитного каркаса 1. Вследствие приближения магнита 5 к магнитомягким пластинам 9 магниточувствительных преобразователей 7 и 8 их сила взаимного притяжениявозрастает пропорционально квадрату индукции магнитного поля в их зазоре. Эта сила заставляет упруго прогибаться пластины 9 ближе к магниту 5, а значит и симметрично расположенные относительно нейтральной плоскости пластины 9 пьезоэлектрики 11 и 12 магниточувствительного преобразователя 7 и аналогично расположенные пьезоэлектрики магниточувствительного преобразователя 8 на величины в несколько микрон в зависимости от жесткости компланарного триморфного пьезоэлектрического элемента. Например, в магниточувствитель 5 18197 1 2014.04.30 ном преобразователе 7 пьезоэлектрик 12 растягивается, а 11 сжимается со средней силой, что приводит к генерации электрического заряда. Под действиемв пьезоэлектрике 11 возбуждаются продольные электрические колебания заряда, электрическое напряжение которого 1, причем 1/31/1, где- заряд, 31 - пьезомодуль, 1 - электрическая емкость пьезоэлектрика 11. Так как ширина у пьзоэлектриков 11 равна 2, а у 12 равна 1 (разная), а длинаи толщинаодинаковые, то их электрические емкости разные,значит и результирующее напряжение будет отлично от нуля (выходной сигнал будет разностным вых(1-2)(31/1- 31/2, где 2 и 2 - электрическая емкость и напряжение пьезоэлектрик 12). Вибрационные помехи, обусловленные силой пом, будут подавляться в соответствие с 4, т.к. чувствительностьпьезоэлектрика к поперечным колебаниям определяется формулой-11/, где 11 - соответствующий пьезомодуль. Поэтому заряды, возникающие из-за вибрационных помех на электродах пьезоэлектриков 11 и 12 (обусловленные силой пом), будут одинакового уровня. При соединении электродов триморфного пьезомагнитного преобразователя по схеме, приведенной на фиг. 2,результирующий сигнал от помехи разностный и теоретически равен нулю. Аналогично такой же выходной сигнал и подавление сигнала вибрационной помехи будет наблюдаться и для магниточувтвительного преобразователя 8, установленного симметрично 7. Таким образом, на выходе магниточувствительных преобразователей 7 и 8 будут наблюдаться одинаковой полярности и уровня сигналы вых., по которым процессор определяет положение каждого штока в каркасе (здесь используется принцип двухканального горячего резервирования выходных сигналов, повышающий надежность устройства). Наличие двух магниточувствительных преобразователей 7 и 8 в одном отверстии каркаса 1 необходимо не только для использования принципа двухканального горячего резервирования выходных сигналов, но и для устранения ложного срабатывания при наличии ускорениявдоль оси . Наличие ускорения вдоль осивызывает изгиб пьезоэлектриков аналогично воздействию силы . Отличие состоит в том, что при истинном передвижении магнита 5 силы взаимного притяжения , действующие на пластины 9 в магниточувствительных преобразователях 7 и 8, противоположно направлены, т.е. 9 притягиваются к магниту 5, а в случае ускорения силы инерции приложены сонаправлено для пластин 9 в преобразователях 7 и 8. Поэтому выходные напряжения будут одинакового уровня, но противоположной полярности, что позволяет идентифицировать наличие ускорения, а не контакт полусферы 6 с объектом. При прекращении принудительного воздействия силына полусферу 6 она с магнитом 5 под действием силы взаимного отталкивания магнитов 5 и 14 возвращается в исходное положение и фиксируется притяжением ферромагнитной пластины 3 к магниту 5. Таким образом, обработка процессором выходных сигналов от всех магниточувствительных преобразователей позволяет получить достоверную информацию об определении положения объекта в схвате робота, о форме контактирования поверхности губок захвата при удержании предмета, о силе воздействия схвата на участки предмета. При этом решена задача по повышению надежности функционирования устройства при одновременном снижении энергопотребления и материалоемкости магнитов. Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемый тактильный сенсор соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: B25J 19/02
Метки: сенсор, тактильный
Код ссылки
<a href="https://by.patents.su/7-18197-taktilnyjj-sensor.html" rel="bookmark" title="База патентов Беларуси">Тактильный сенсор</a>
Тактильный сенсор для робота
Номер патента: U 8599
Опубликовано: 30.10.2012
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: B25J 19/02, H01L 41/08, B25J 19/00...
Метки: сенсор, тактильный, робота
Текст:
...на поверхности каждого из миниатюрных магнитов. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению надежности при одновременном исключении энергопотребления. Решение поставленной задачи достигается тем, что в предложенном устройстве магниточувтвительный преобразователь выполнен в виде датчика Виганда 3, и имеет значительно более...
Оптико-акустический сенсор

Номер патента: 12411
Опубликовано: 30.10.2009
Авторы: Старовойтов Владимир Сергеевич, Полонецкий Александр Леонидович, Фираго Владимир Александрович, Стецик Виктор Михайлович
МПК: G01N 21/00
Метки: оптико-акустический, сенсор
Текст:
...и мультиплексора обратно в ячейку. Свойство, появляющееся у заявляемого технического решения, - повышение чувствительности или крутизны преобразования газового сенсора за счет увеличения средней мощности излучения, проходящего через оптико-акустическую ячейку, что соответственно улучшает пороговую чувствительность определения концентрации контролируемого газового компонента. Сущность изобретения поясняют фиг. 1 и 2. На фиг. 1 приведена...
Электрохимический газовый сенсор

Номер патента: U 9078
Опубликовано: 30.04.2013
Автор: Шабловский Ярослав Олегович
МПК: G01N 27/12
Метки: газовый, электрохимический, сенсор
Текст:
...не только выводит газовый сенсор из строя, но и может инициировать детонацию газовоздушной смеси. Предотвратить названные нежелательные явления можно только путем отвода тепла от саморазогревающегося в процессе своей работы газочувствительного слоя. Лучшими теплоаккумулирующими материалами являются вещества, испытывающие фазовые превращения. Поглощение теплоты фазового превращения происходит при строго определенной температуре. Благодаря...
Сенсор поверхности для сканирующего ближнеполевого оптического микроскопа
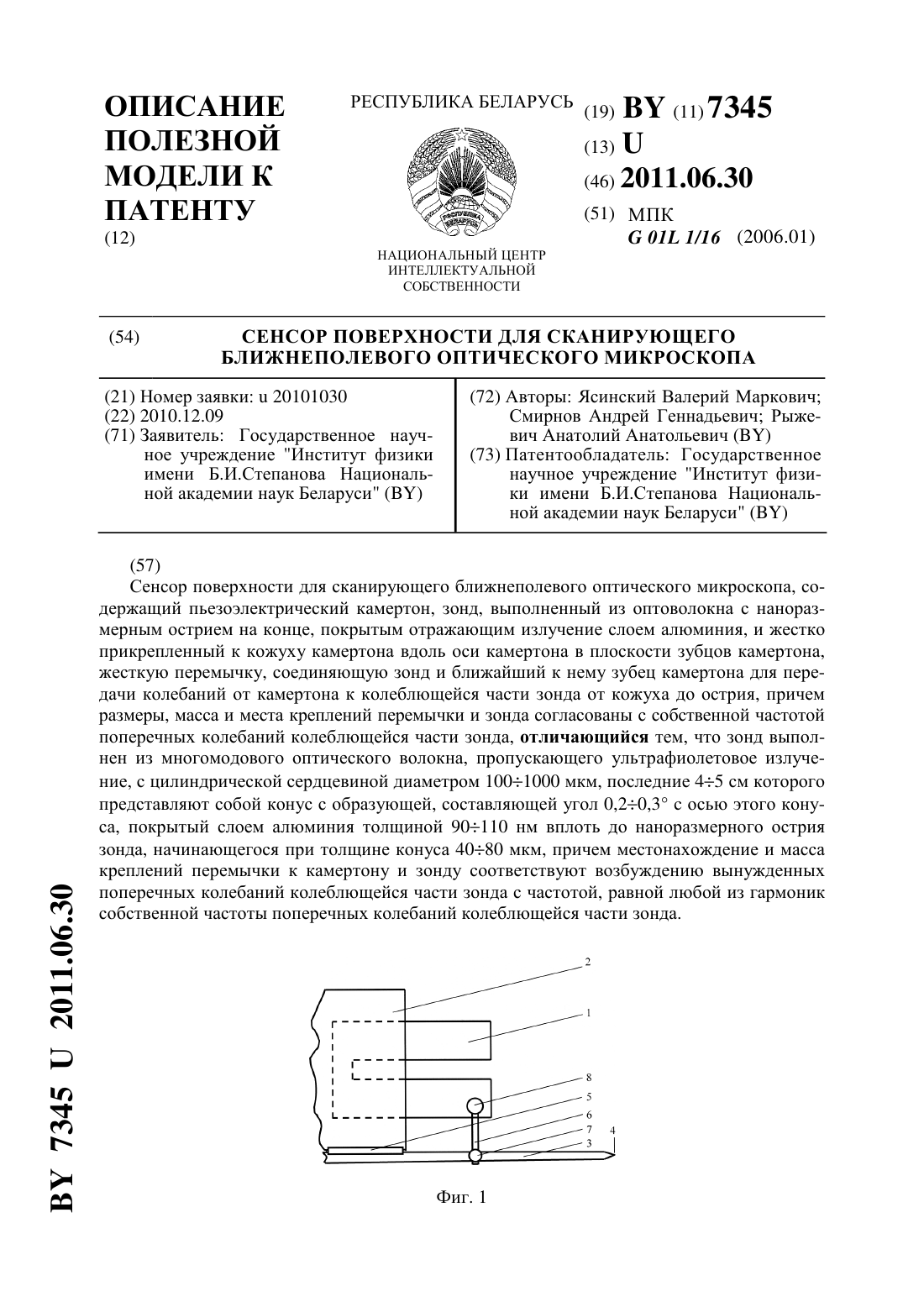
Номер патента: U 7345
Опубликовано: 30.06.2011
Авторы: Ясинский Валерий Маркович, Смирнов Андрей Геннадьевич, Рыжевич Анатолий Анатольевич
МПК: G01L 1/16
Метки: поверхности, сенсор, микроскопа, ближнеполевого, оптического, сканирующего
Текст:
...сенсор поверхности для сканирующего ближнеполевого оптического микроскопа включает следующие элементы пьезоэлектрический камертон, зонд, выполненный из оптоволокна с наноразмерным острием на конце, покрытым тонким слоем алюминия, и жестко прикрепленный к кожуху камертона вдоль оси камертона в плоскости зубцов камертона, жесткая перемычка, соединяющая зонд и ближайший к нему зубец камертона для передачи колебаний от камертона к колеблющейся...
Тонкопленочный полупроводниковый газовый сенсор
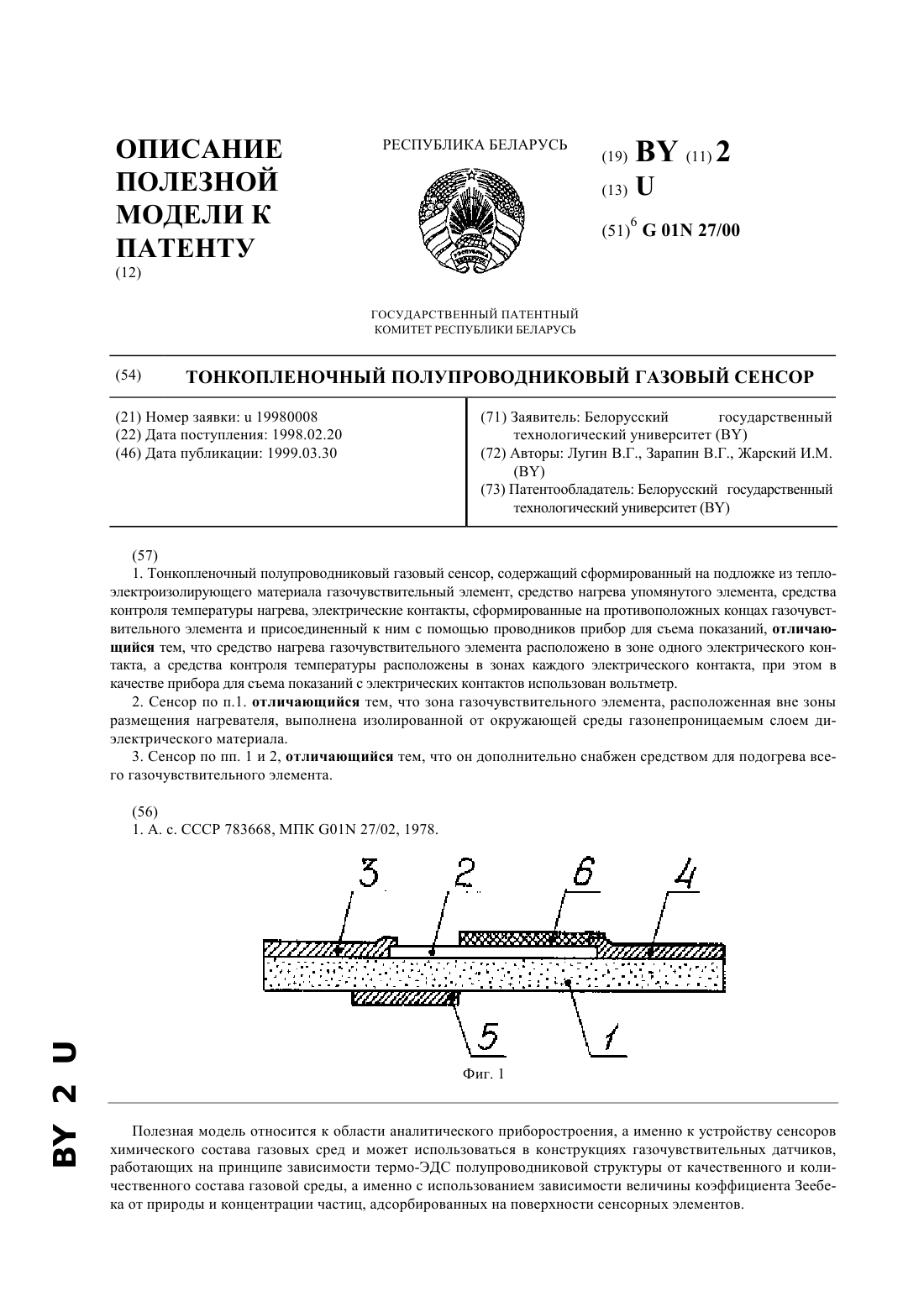
Номер патента: U 2
Опубликовано: 30.03.1999
Авторы: Жарский Иван Михайлович, Лугин Валерий Геннадьевич, Зарапин Виталий Георгиевич
МПК: G01N 27/00
Метки: тонкопленочный, сенсор, полупроводниковый, газовый
Текст:
...дополнительно снабжен средством подогрева всего газочувствительного элемента для стабилизации температурных условий при необходимости повышения температуры газочувствительного элемента. Реализация предложенной полезной модели позволяет простыми, доступными и надежными средствами без усложнения отработанной тонкопленочной технологии повысить удобство измерений, снизить дрейф показаний, релаксацию, неконтролируемый перенос вещества, что...
Предыдущий патент: Способ получения пористого порошкового материала
Следующий патент: Способ и система для обеспечения доступа пользователя к услугам IMS-сети
Случайный патент: Трубчатая вертикальная опора