Помехоустойчивый тактильный сенсор для робота
Текст
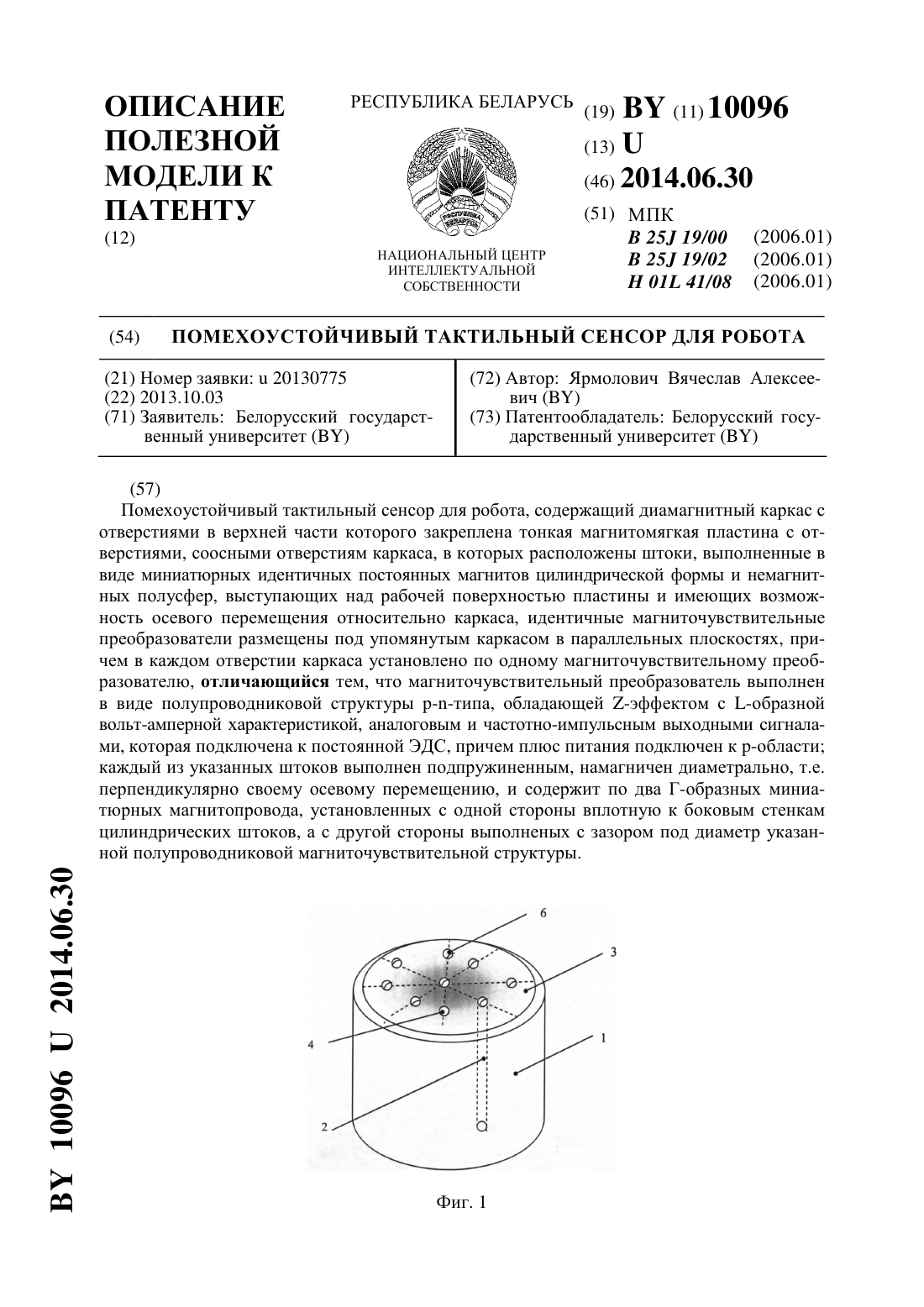
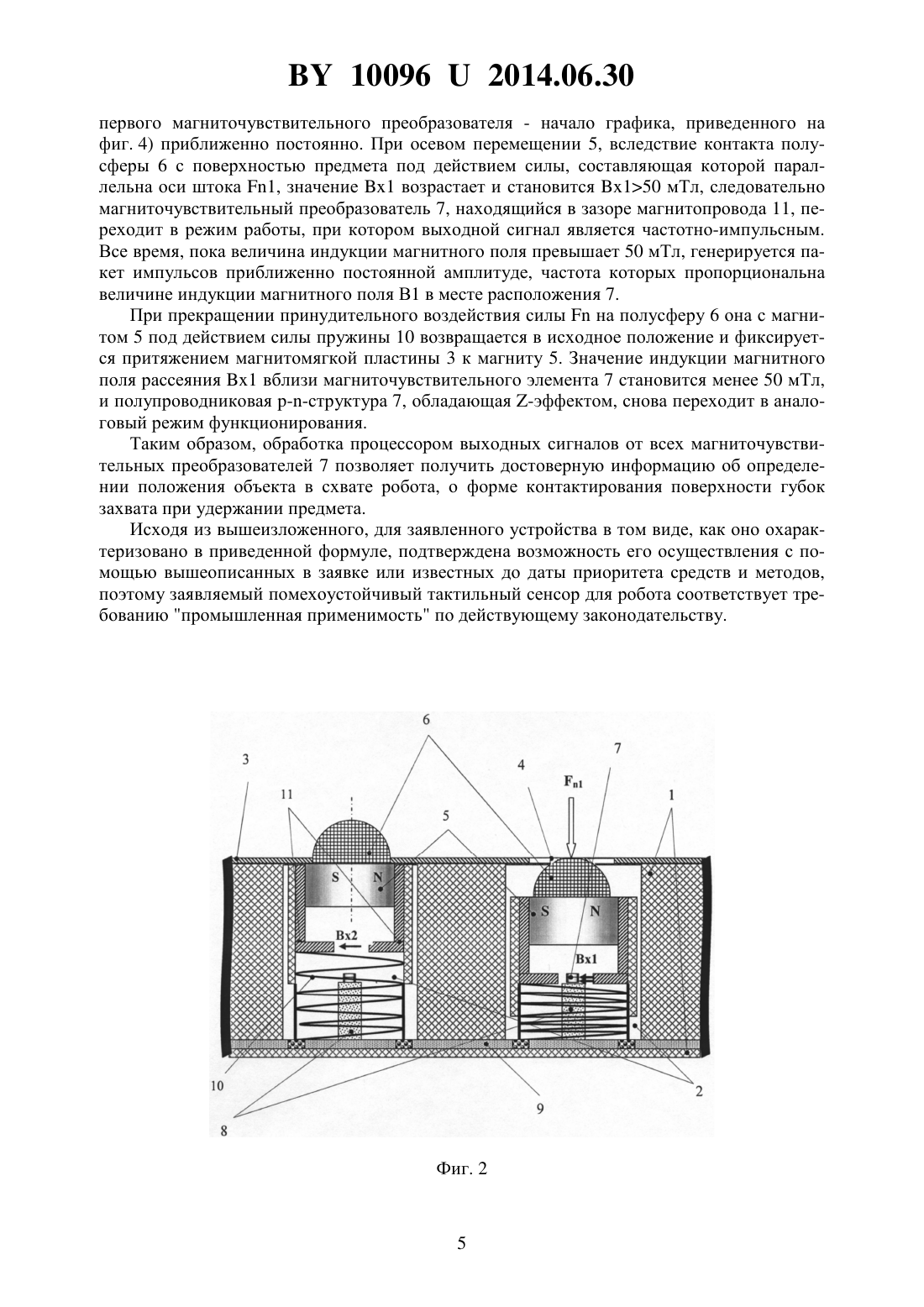
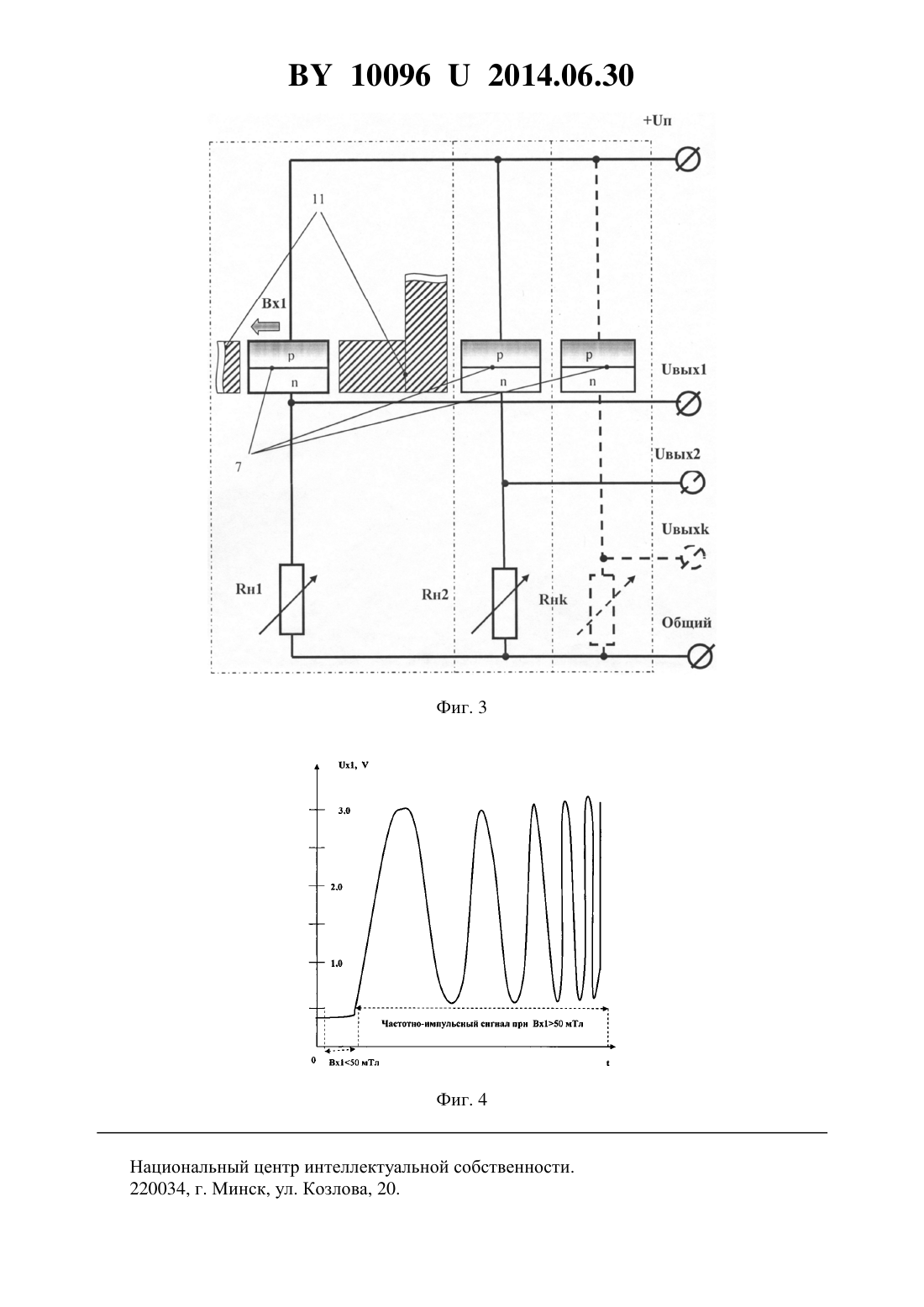
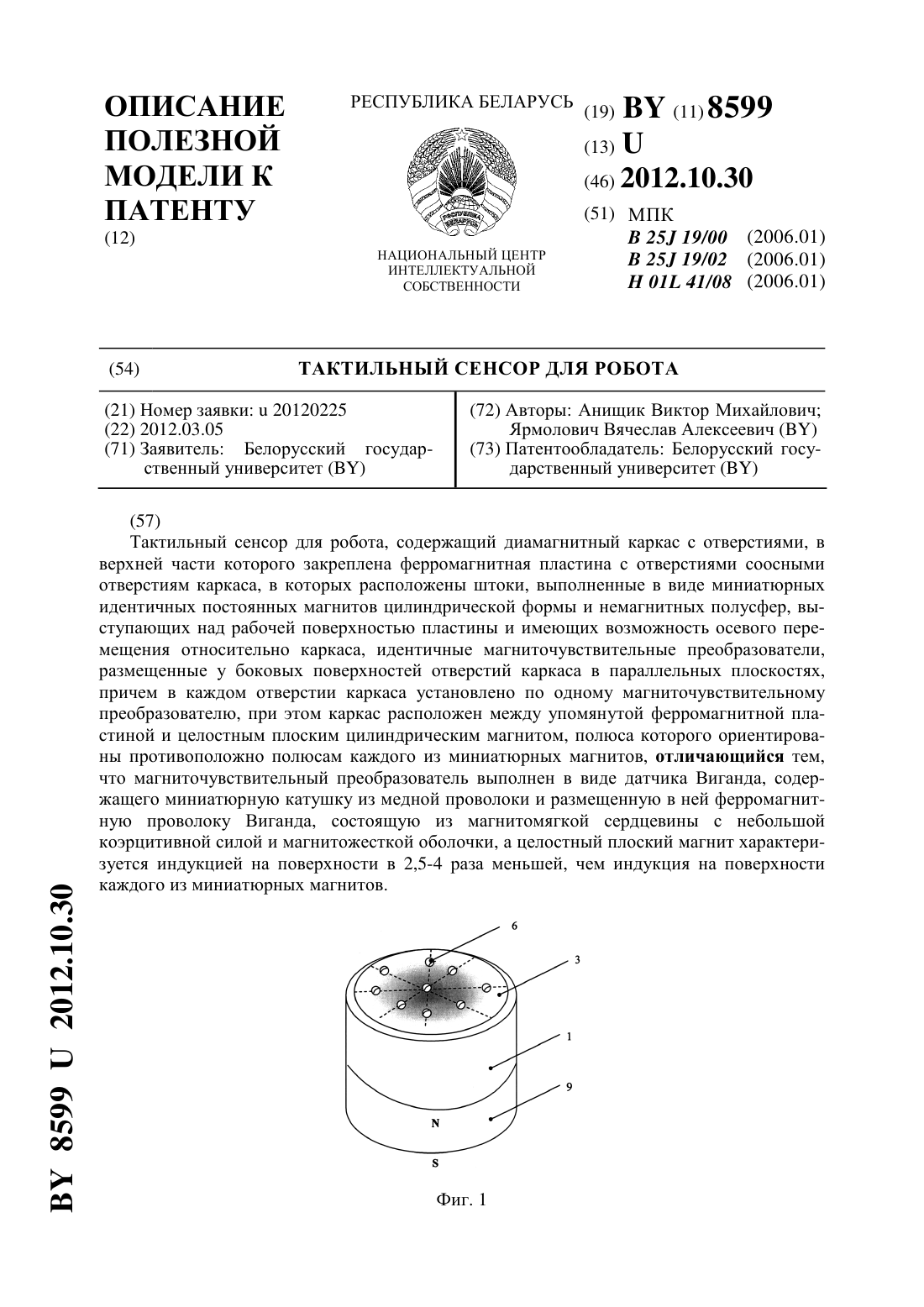
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ПОМЕХОУСТОЙЧИВЫЙ ТАКТИЛЬНЫЙ СЕНСОР ДЛЯ РОБОТА(71) Заявитель Белорусский государственный университет(72) Автор Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) Помехоустойчивый тактильный сенсор для робота, содержащий диамагнитный каркас с отверстиями в верхней части которого закреплена тонкая магнитомягкая пластина с отверстиями, соосными отверстиям каркаса, в которых расположены штоки, выполненные в виде миниатюрных идентичных постоянных магнитов цилиндрической формы и немагнитных полусфер, выступающих над рабочей поверхностью пластины и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи размещены под упомянутым каркасом в параллельных плоскостях, причем в каждом отверстии каркаса установлено по одному магниточувствительному преобразователю, отличающийся тем, что магниточувствительный преобразователь выполнен в виде полупроводниковой структуры типа, обладающей -эффектом с -образной вольт-амперной характеристикой, аналоговым и частотно-импульсным выходными сигналами, которая подключена к постоянной ЭДС, причем плюс питания подключен к -области каждый из указанных штоков выполнен подпружиненным, намагничен диаметрально, т.е. перпендикулярно своему осевому перемещению, и содержит по два Г-образных миниатюрных магнитопровода, установленных с одной стороны вплотную к боковым стенкам цилиндрических штоков, а с другой стороны выполненых с зазором под диаметр указанной полупроводниковой магниточувствительной структуры.(56) 1. А.с. СССР 1781029, МПК 25 19/00 25 19/02, 1992. 2. Патентна полезную модель 8599, МПК 25 19/00 25 19/02 01 41/08,2012 (прототип). 3. Бараночников М.Л. Микромагнитоэлектроника. Т. 1. - М. ДМК Пресс, 2001. - 544 с. 4. А.с. СССР 1739402, МПК 01 29/06, 1992. Заявляемая полезная модель относится к робототехнике и может быть использована для получения информации об определении положения объекта в схвате робота и о форме контактирования поверхности губок захвата при удержании предмета. Известен тактильный сенсор, приведенный в 1. Устройство содержит каркас с магнитной системой, расположенные на его рабочей поверхности штоки, имеющие возможность осевого перемещения относительно каркаса, и магниточувствительные преобразователи,выполненные из тонких пленок магнитомягкого материала, например пермаллоя, функционирующие на планарном эффекте Холла. Магниточувствительные преобразователи расположены в плоскостях, проходящих через оси симметрии плоского магнита и каждого из штоков. Магнитная система выполнена в виде плоского магнита и ферромагнитной пластины, расположенных параллельно друг другу с зазором, при этом штоки выполнены в виде постоянных миниатюрных магнитов, обращенных одноименными полюсами к аналогичному полюсу плоского магнита. На штоках закреплены неферромагнитные части в виде полусфер, выступающих над пластиной, в которой выполнены отверстия, соосные с отверстиями каркаса, и в которых размещены штоки. Устройство работает следующим образом при контакте штока (немагнитной полусферы) с поверхностью предмета под действием силы, составляющая которой параллельна оси штока, происходит отрывание миниатюрного магнита от ферромагнитной пластины и движение в отверстии немагнитного каркаса. По ЭДС электрических сигналов от магниточувствительных преобразователей судят о величинах перемещений штоков в каркасе,следовательно, о контактировании поверхности губок захвата при удержании предмета и силе воздействия схвата на участки предмета. После прекращения силового воздействия на предмет штоки возвращаются в исходное состояние благодаря силам отталкивания миниатюрных магнитов от плоского магнита и фиксируются притяжением ферромагнитной пластины к миниатюрным магнитам, что придает устойчивость сенсору при ускорении,случайных толчках и тряске. Тем не менее, описанное устройство обладает повышенными габаритами и низкой помехоустойчивостью в связи с недостаточно высоким уровнем выходных сигналов, величины которых составляют менее 10 мВ для среднестатистических элементов, функционирующих на планарном эффекте Холла. Поэтому требуется использование усилителей сигналов, а также, естественно, источников питающих напряжений. Другим недостатком 1 является сложность конструкции, которая обусловлена большим количеством электрических проводов. Наиболее близким по технической сущности к предлагаемому техническому решению является тактильный сенсор для робота, описанный в 2 (прототип). Тактильный сенсор для робота содержит диамагнитный каркас с отверстиями, в верхней части которого закреплена ферромагнитная пластина с отверстиями, соосными отверстиям каркаса, в которых расположенные штоки, выполненные в виде миниатюрных идентичных постоянных магнитов цилиндрической формы и немагнитных полусфер, выступающих над рабочей поверхностью пластины и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи размещены у боковых поверхностей отверстий каркаса в параллельных плоскостях, причем в каждом отверстии каркаса установлено по одному магниточувствительному преоб 2 100962014.06.30 разователю, при этом каркас расположен между упомянутой ферромагнитной пластиной и целостным плоским цилиндрическим магнитом, полюса которого ориентированы противоположно полюсам каждого из миниатюрных магнитов. Магниточувствительный преобразователь выполнен в виде датчика Виганда, содержащего миниатюрную катушку из медной проволоки и размещенную в ней ферромагнитную проволоку Виганда, состоящую из магнитомягкой сердцевины с небольшой коэрцитивной силой и магнитожесткой оболочки, а целостный плоский магнит характеризуется индукцией на поверхности в 2,5-4 раза меньшей, чем индукция на поверхности каждого из миниатюрных магнитов. Недостатком настоящего устройства является низкая помехоустойчивость, связанная с тем, что магниточувствительный преобразователь, выполненный в виде датчика Виганда,генерирует одиночный импульс при движении штока в условиях контакта штока (немагнитной полусферы) с поверхностью предмета под действием силы, составляющая которой параллельна оси штока. Поэтому случайно наведенный одиночный импульс помехи, например, от соседнего штока с магнитом будет восприниматься сенсором как устойчивый контакт с поверхностью губок схвата без возможности повторной проверки этого состояния. Кроме того, наличие миниатюрных катушек с большим числом витком в каждой усложняет изготовление конструкции устройства и увеличивает его габариты. Задачей, решаемой в настоящей полезной модели, является повышение помехоустойчивости и упрощение конструкции. Для решения поставленной комплексной задачи предлагается следующее техническое решение. Помехоустойчивый тактильный сенсор для робота содержит диамагнитный каркас с отверстиями, в верхней части которого закреплена тонкая магнитомягкая пластина с отверстиями, соосными отверстиям каркаса, в которых расположены штоки, выполненные в виде миниатюрных идентичных постоянных магнитов цилиндрической формы и немагнитных полусфер, выступающих над рабочей поверхностью пластины и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи размещены под упомянутым каркасом в параллельных плоскостях,причем в каждом отверстии каркаса установлено по одному магниточувствительному преобразователю. Он отличается тем, что магниточувствительный преобразователь выполнен в виде полупроводниковой структуры типа, обладающей -эффектом 3, 4 с -образной вольтамперной характеристикой, аналоговым и частотно-импульсным выходными сигналами,которая подключена к постоянной ЭДС, причем плюс питания подключен к -области каждый из указанных штоков выполнен подпружиненным, намагничен диаметрально, т.е. перпендикулярно своему осевому перемещению, и содержит по два Г-образных миниатюрных магнитопровода, установленных с одной стороны вплотную к боковым стенкам цилиндрических штоков, а с другой стороны выполненых с зазором под диаметр указанной полупроводниковой магниточувствительной структуры. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению помехоустойчивости и упрощению конструкции. Проведенный анализ уровня техники позволил установить, что заявителем не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемой полезной модели, а определение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле полезной модели. Таким образом, комплексный анализ изложенных отличительных признаков конструкции помехоустойчивого тактильного сенсора для робота показывает, что они являются 3 100962014.06.30 существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых в совокупности обеспечивают решение поставленной комплексной задачи в заявляемом устройстве, а само устройство содержит новые элементы,следовательно, можно сделать вывод о соответствии заявляемой полезной модели условию патентоспособности новизна. Заявляемая полезная модель поясняется фиг. 1-4. На фиг. 1 изображен внешний вид помехоустойчивого тактильного сенсора для робота. На фиг. 2 - разрез по радиусу сенсора. На фиг. 3 приведена упрощенная электрическая схема подключения матрицы магниточувствительных преобразователей к источнику постоянного напряжения. На фиг. 4 изображен выходной сигнал - ЭДС 1 первого магниточувствительного преобразователя без постоянной составляющей 01, т.е. 1 вых 1-01, снимаемый с резистора н 1, как функция времени , в условиях, когда шток 5 нажат, находится в функциональной зависимости от величины индукции магнитного поля 1 в первом магниточувствительном преобразователе 7. Устройство содержит диамагнитный каркас 1 с отверстиями 2, в верхней части которого закреплена тонкая магнитомягкая пластина 3 с отверстиями 4, соосными отверстиям 2 каркаса 1, в которых расположены штоки, выполненные в виде миниатюрных идентичных постоянных магнитов цилиндрической формы 5 и немагнитных полусфер 6, выступающих над рабочей поверхностью пластины 3 и имеющих возможность осевого перемещения относительно каркаса 1, идентичные магниточувствительные преобразователи 7, размещенные в отверстиях 2 каркаса 1 в параллельных плоскостях на креплениях 8, причем в каждом отверстии 2 каркаса установлено по одному магниточувствительному преобразователю 7, при этом на дне каркаса 1 расположена плата обработки сигнала 9. Каждый из указанных штоков 5 (магнитов) выполнен подпружиненным пружинами 10, намагничен диаметрально, т.е. перпендикулярно своему осевому перемещению, и содержит по два Гобразных миниатюрных магнитопровода 11, установленных с одной стороны вплотную к боковым стенкам цилиндрических штоков 5, а с другой стороны выполненых с зазором под диаметр указанной полупроводниковой магниточувствительной структуры 7. Каждый магниточувствительный преобразователь 7 выполнен в виде полупроводниковой структуры типа, обладающей -эффектом 3, 4 с -образной вольт-амперной характеристикой, аналоговым и частотно-импульсным выходными сигналами, а источник питающего напряжения магниточувствительного преобразователя выполнен с функцией постоянной ЭДС, причем плюс питания постоянного напряжения п 6 подключен к области. Способ формирования - и -областей такой структуры подробно описан в 4. Вектор индукция магнитного поляприкладывается в плоскости, параллельной плоскости раздела - и -областей. Такие структуры поставляются фирмой, Россия,г. Москва (Институт проблем управления). Устройство работает следующим образом. В исходном состоянии немагнитные полусферы 6 штоков 5 (магнитов) устройства находятся над рабочей поверхностью магнитомягкой пластины 3 и удерживаются в исходном состоянии за счет сил магнитного притяжения между пластиной 3 и магнитом 5. При контакте полусферы 6 с поверхностью предмета под действием силы, составляющая которой параллельна оси штока 1, происходит отрывание миниатюрного магнита 5 от магнитомягкой пластины 3 и движение в отверстии 2 немагнитного каркаса 1. Если магниточувствительный преобразователь 7 находится вне магнитопровода 11,значение индукции магнитного поля рассеяния 1 вблизи магниточувствительного элемента 7 менее 50 мТл и полупроводниковая рструктура 7, обладающая -эффектом,функционирует в аналоговом режиме, т.е. ЭДС 1 - пропорционально 1 (на примере 4 100962014.06.30 первого магниточувствительного преобразователя - начало графика, приведенного на фиг. 4) приближенно постоянно. При осевом перемещении 5, вследствие контакта полусферы 6 с поверхностью предмета под действием силы, составляющая которой параллельна оси штока 1, значение 1 возрастает и становится 150 мТл, следовательно магниточувствительный преобразователь 7, находящийся в зазоре магнитопровода 11, переходит в режим работы, при котором выходной сигнал является частотно-импульсным. Все время, пока величина индукции магнитного поля превышает 50 мТл, генерируется пакет импульсов приближенно постоянной амплитуде, частота которых пропорциональна величине индукции магнитного поля В 1 в месте расположения 7. При прекращении принудительного воздействия силына полусферу 6 она с магнитом 5 под действием силы пружины 10 возвращается в исходное положение и фиксируется притяжением магнитомягкой пластины 3 к магниту 5. Значение индукции магнитного поля рассеяния 1 вблизи магниточувствительного элемента 7 становится менее 50 мТл,и полупроводниковая структура 7, обладающая -эффектом, снова переходит в аналоговый режим функционирования. Таким образом, обработка процессором выходных сигналов от всех магниточувствительных преобразователей 7 позволяет получить достоверную информацию об определении положения объекта в схвате робота, о форме контактирования поверхности губок захвата при удержании предмета. Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемый помехоустойчивый тактильный сенсор для робота соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: H01L 41/08, B25J 19/02, B25J 19/00
Метки: робота, сенсор, помехоустойчивый, тактильный
Код ссылки
<a href="https://by.patents.su/6-u10096-pomehoustojjchivyjj-taktilnyjj-sensor-dlya-robota.html" rel="bookmark" title="База патентов Беларуси">Помехоустойчивый тактильный сенсор для робота</a>
Тактильный сенсор для робота
Номер патента: U 8599
Опубликовано: 30.10.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
МПК: B25J 19/02, B25J 19/00, H01L 41/08...
Метки: тактильный, робота, сенсор
Текст:
...на поверхности каждого из миниатюрных магнитов. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению надежности при одновременном исключении энергопотребления. Решение поставленной задачи достигается тем, что в предложенном устройстве магниточувтвительный преобразователь выполнен в виде датчика Виганда 3, и имеет значительно более...
Тактильный сенсор
Номер патента: 18197
Опубликовано: 30.04.2014
Автор: Ярмолович Вячеслав Алексеевич
МПК: B25J 19/02
Метки: тактильный, сенсор
Текст:
...по толщине плоскими пьезоэлектриками равной длины и толщины и различной ширины, на каждый из торцов которых нанесен пленочный электрод, при этом каждая из указанных металлических пластин жестко скреплена с каркасом двумя противоположными торцами с возможностью прогиба в микрометровом диапазоне и соединена с ближайшими друг к другу электродами своего преобразователя, электроды другой пары которого электрически соединены друг с другом. По...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Филонов Игорь Павлович, Вериго Евгений Борисович
МПК: B25J 9/16
Метки: робота, промышленного, управления, манипулятором, способ
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Помехоустойчивый датчик проскальзывания
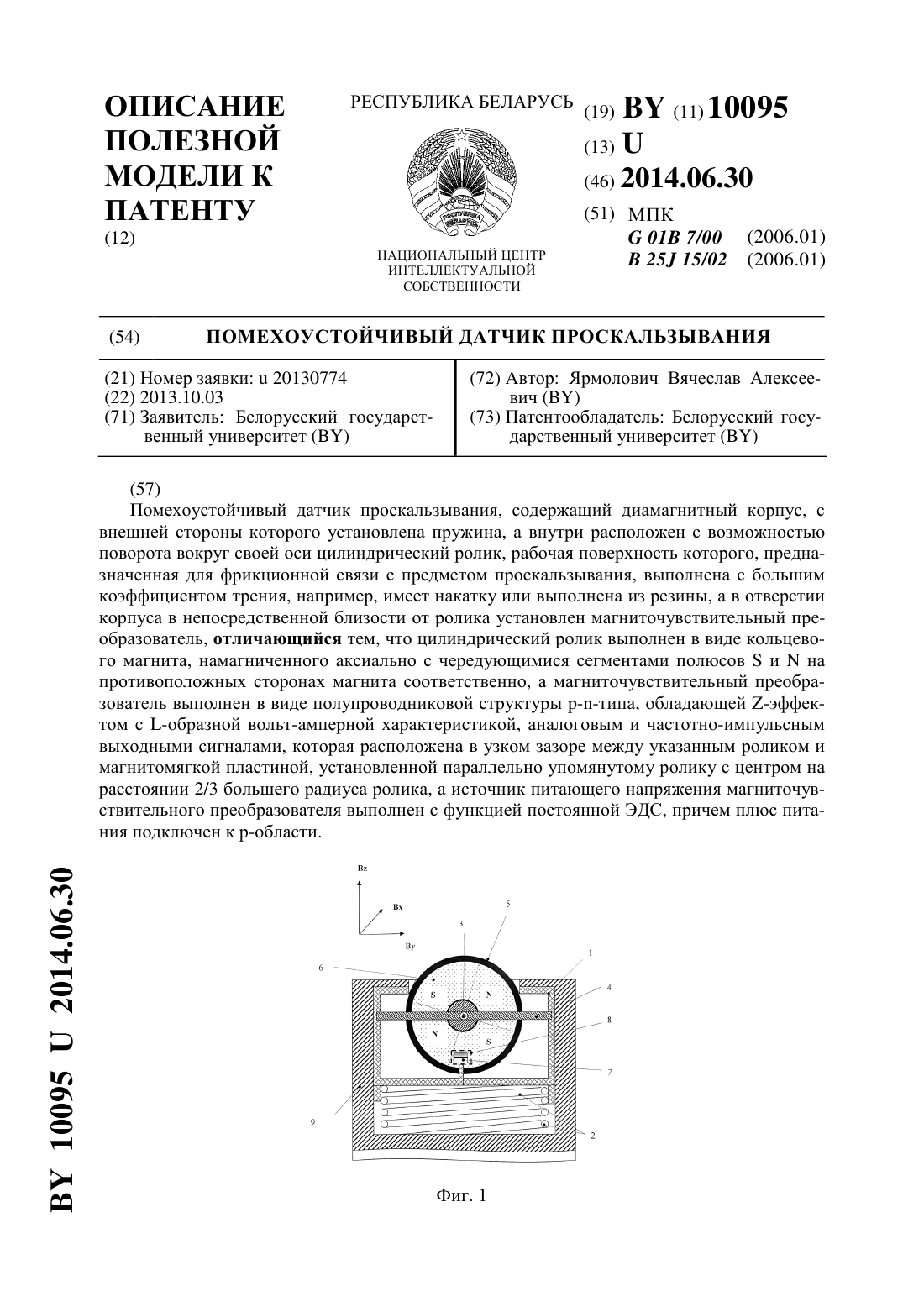
Номер патента: U 10095
Опубликовано: 30.06.2014
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01B 7/00, B25J 15/02
Метки: помехоустойчивый, проскальзывания, датчик
Текст:
...с функцией постоянной ЭДС, причем плюс питания подключен к -области. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению помехоустойчивости при одновременном снижении материалоемкости магнита. Решение поставленной комплексной задачи достигается следующими путями. В предложенном устройстве исключение из конструкции 2 магнита с...
Устройство для испытаний лафетных стволов пожарного робота
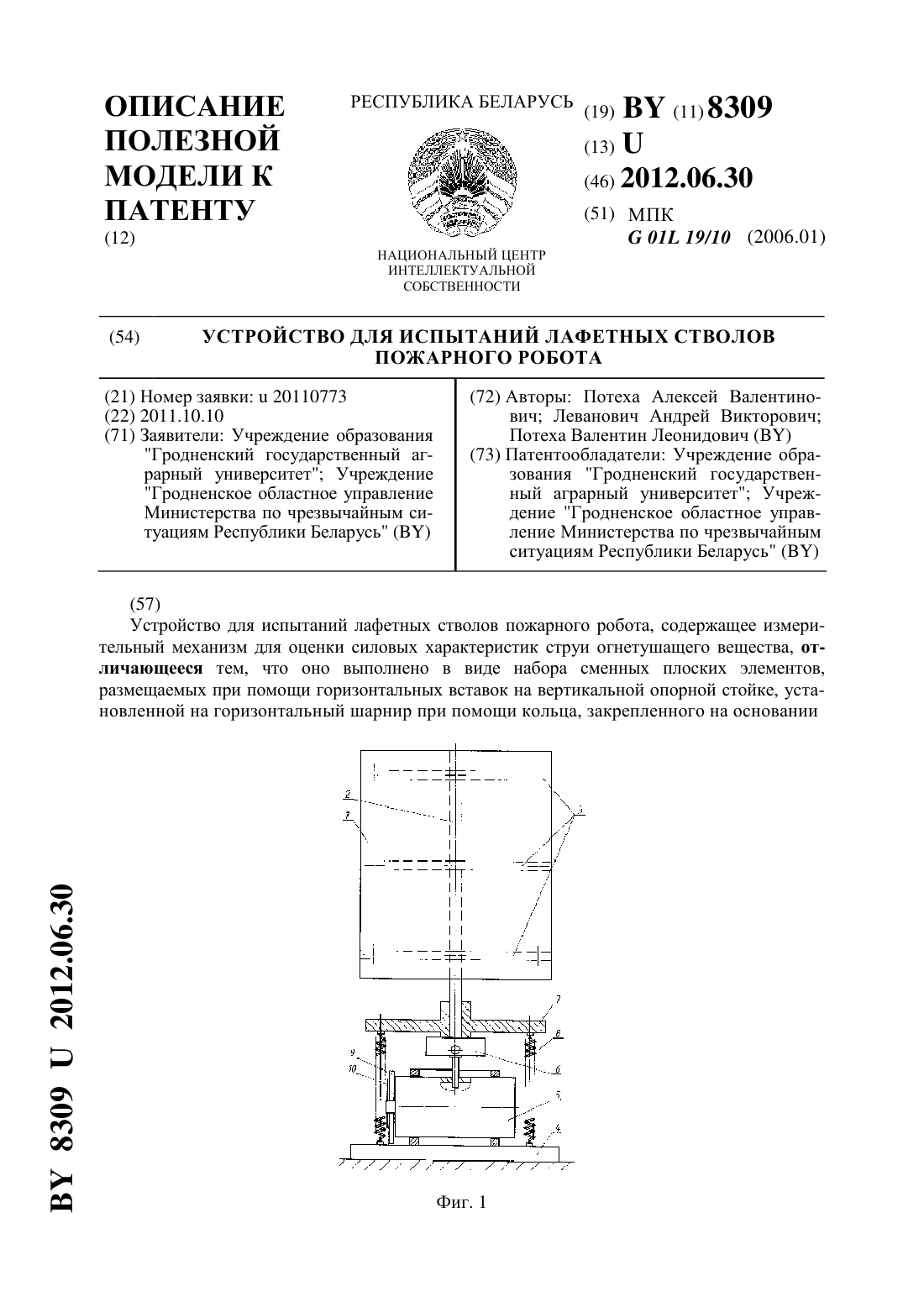
Номер патента: U 8309
Опубликовано: 30.06.2012
Авторы: Леванович Андрей Викторович, Потеха Валентин Леонидович, Потеха Алексей Валентинович
МПК: G01L 19/10
Метки: робота, пожарного, стволов, испытаний, лафетных, устройство
Текст:
...определяющим не только условия труда пожарного, но и саму возможность качественно выполнить им поставленную боевую задачу. Существенным недостатком известного технического устройства для испытаний лафетных стволов является невозможность оценки силового воздействия струи огнетушащего вещества непосредственно на элементы инфраструктуры объекта, полностью или частично охваченного пожаром. При этом можно выделить два аспекта силовое...
Предыдущий патент: Помехоустойчивый датчик проскальзывания
Следующий патент: Установка для определения прочности макаронных изделий
Случайный патент: Штифтовая культевая вкладка для восстановления многокорневых зубов