B25J 9/16 — программное управление
Способ управления манипулятором промышленного робота
Номер патента: 5824
Опубликовано: 30.12.2003
Авторы: Вериго Евгений Борисович, Мурашко Виталий Николаевич
МПК: B25J 9/16
Метки: манипулятором, управления, робота, промышленного, способ
Текст:
...по алгоритму, представленному в 3, учитывая ограничения по моменту приводных двигателей сочленений. Решают обратную задачу кинематики для манипулятора, определяемую выражением, где - обобщенные координаты сочленений манипулятора. Тогда для приводных двигателей сочленений манипулятора для развиваемых моментов записывают где(,) ,(, ) - нижнее предельное значение момента, развиваемого приводным двигателем -го сочленения момента,...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: способ, манипулятором, управления, промышленного, робота
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Способ управления манипулятором промышленного робота

Номер патента: 4972
Опубликовано: 30.03.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: робота, управления, способ, промышленного, манипулятором
Текст:
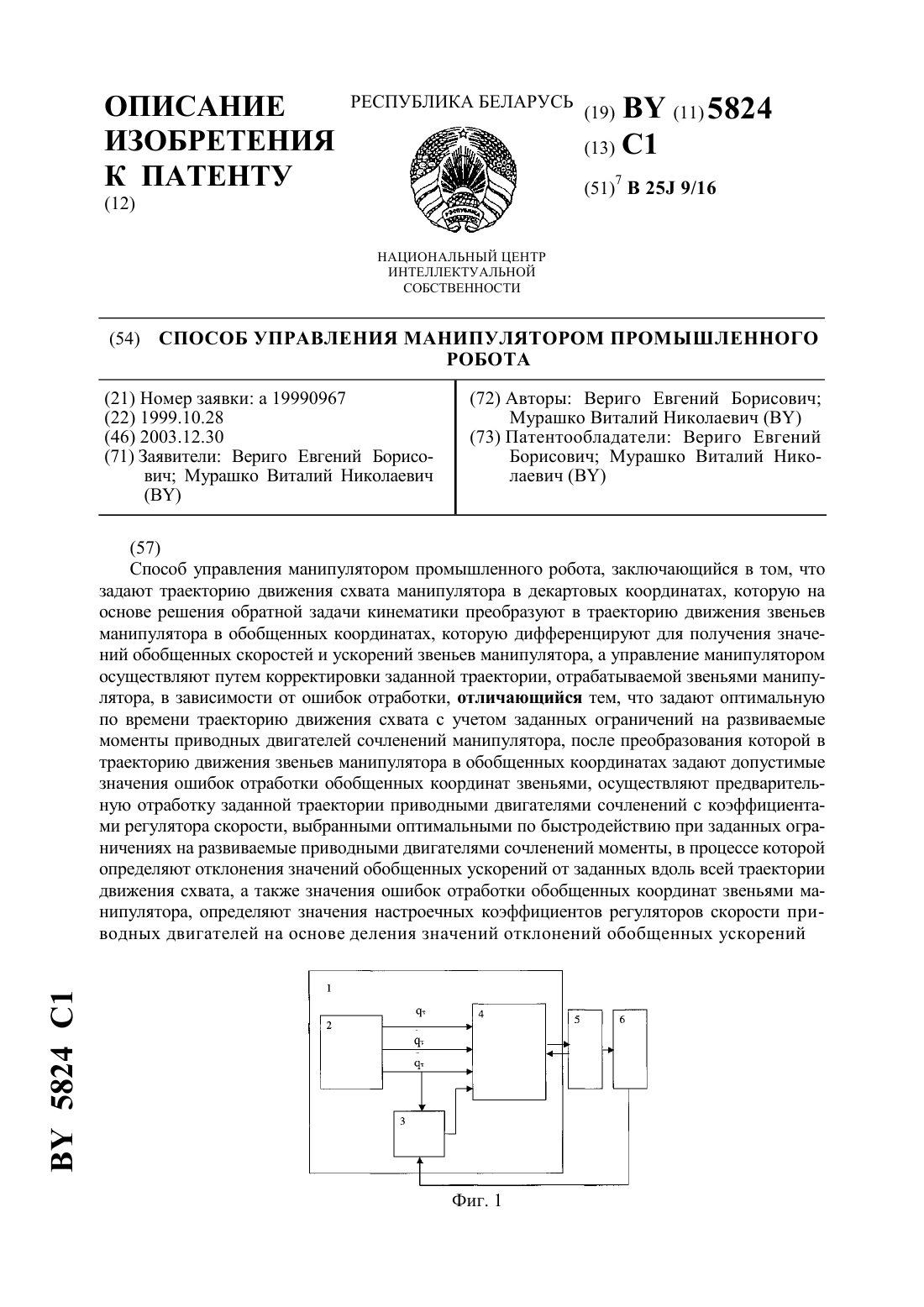
...схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль...
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Курч Леонид Витальевич, Черкас Александр Адамович, Герасимов Юрий Борисович, Филонов Игорь Павлович
МПК: B25J 11/00, B25J 9/16
Метки: управления, манипулятором, робота, промышленного, способ
Текст:
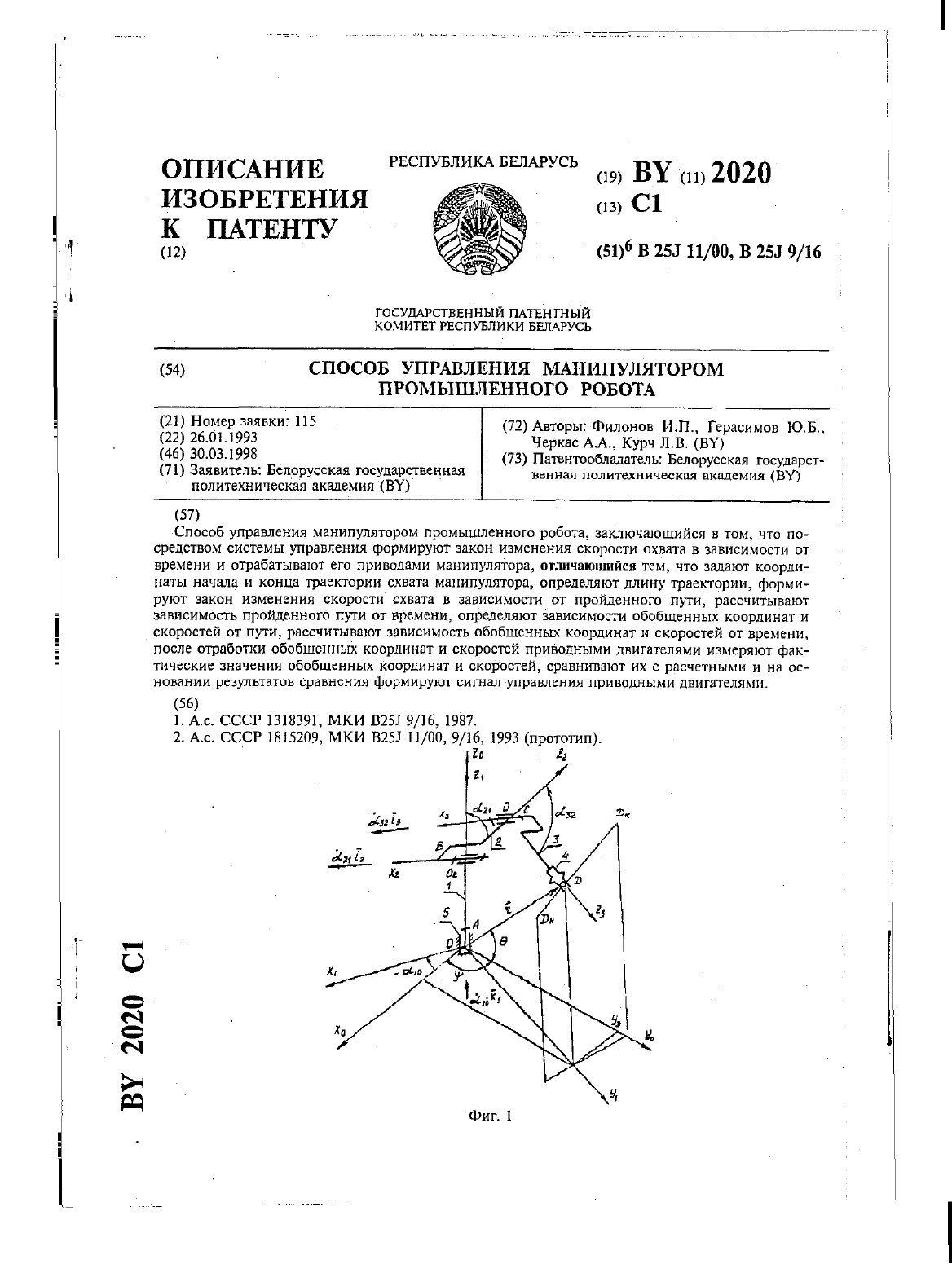
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...