Устройство для перемещения по вертикальным поверхностям, содержащее вакуумный захват, и вакуумный захват

Текст
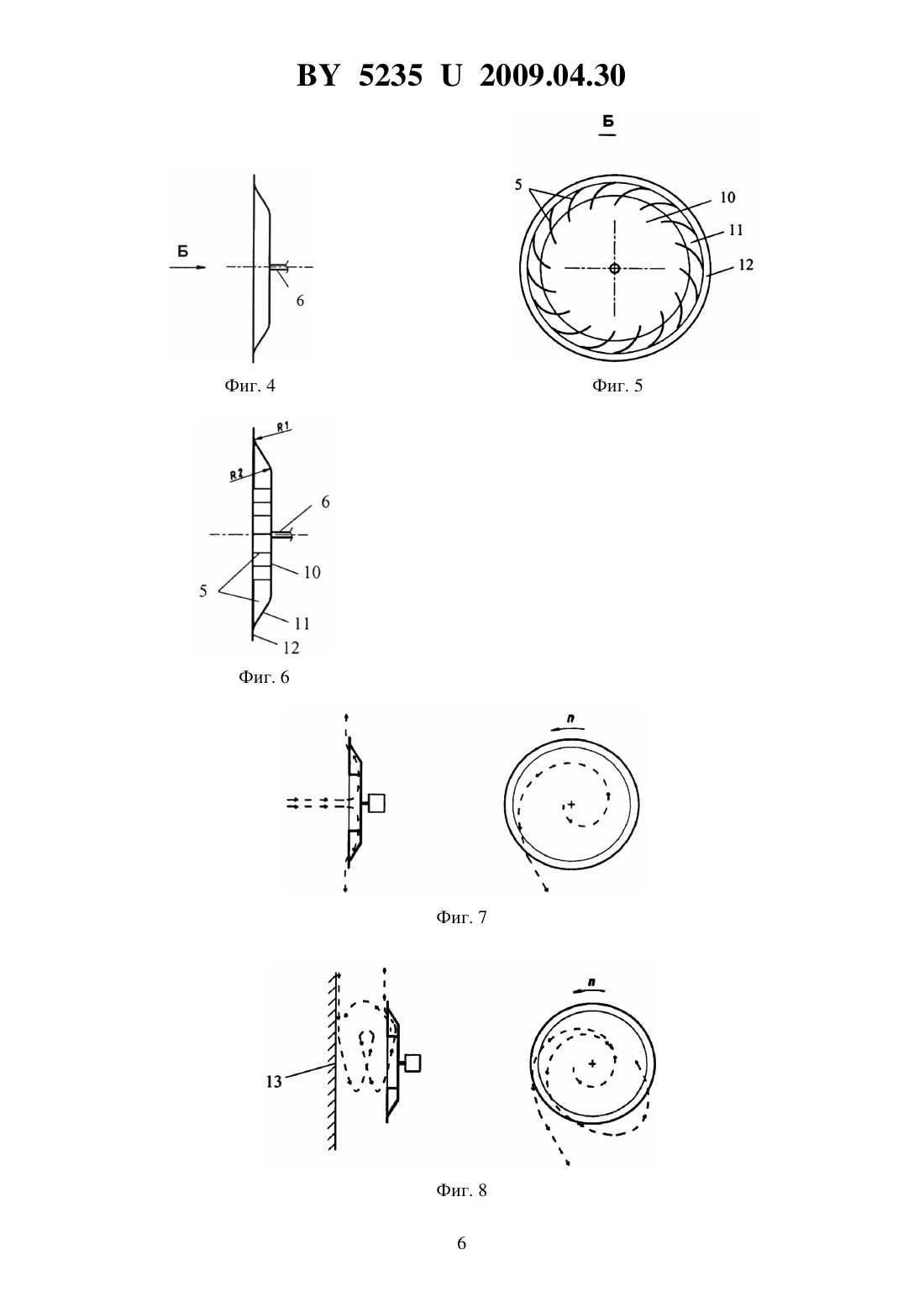
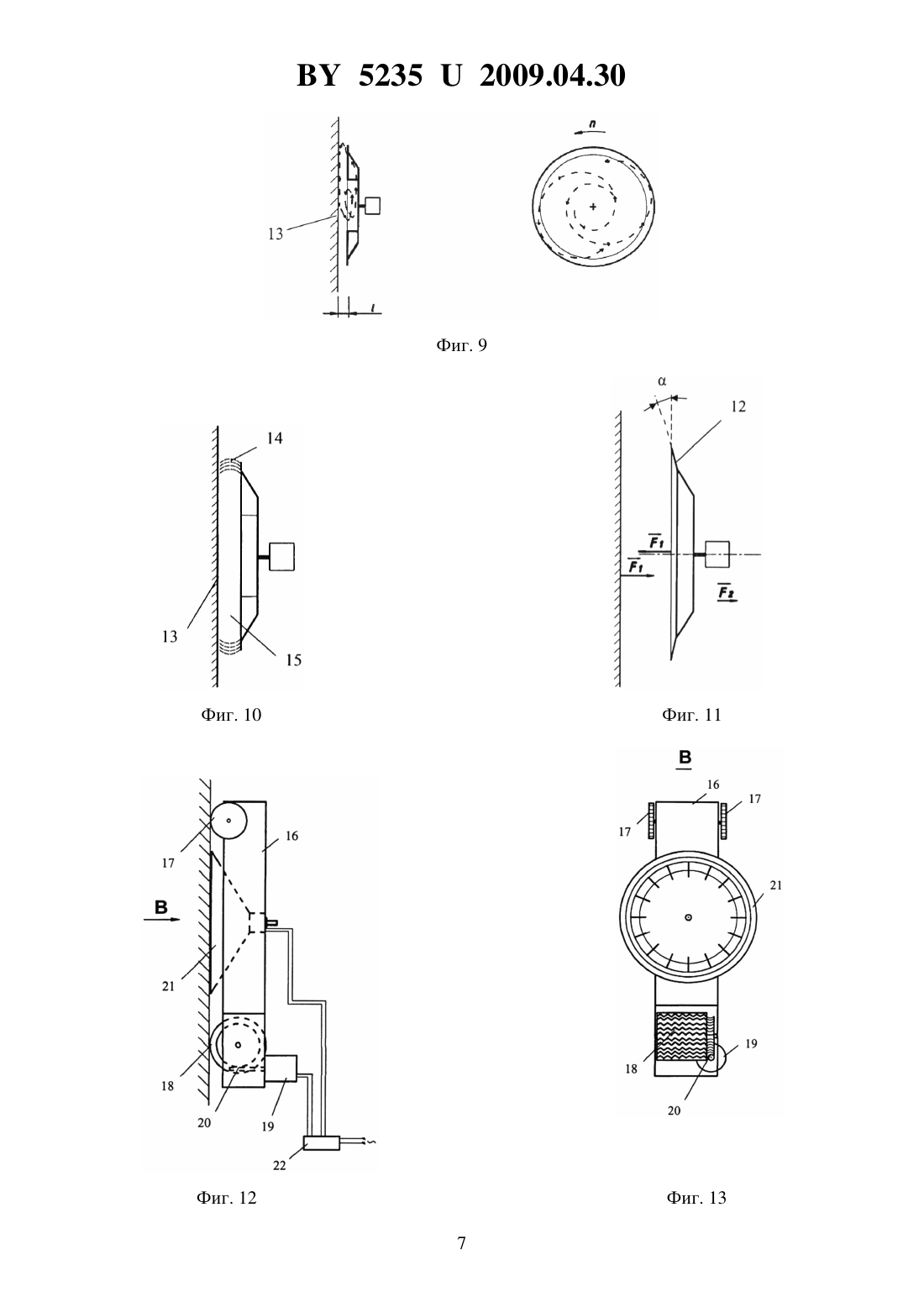
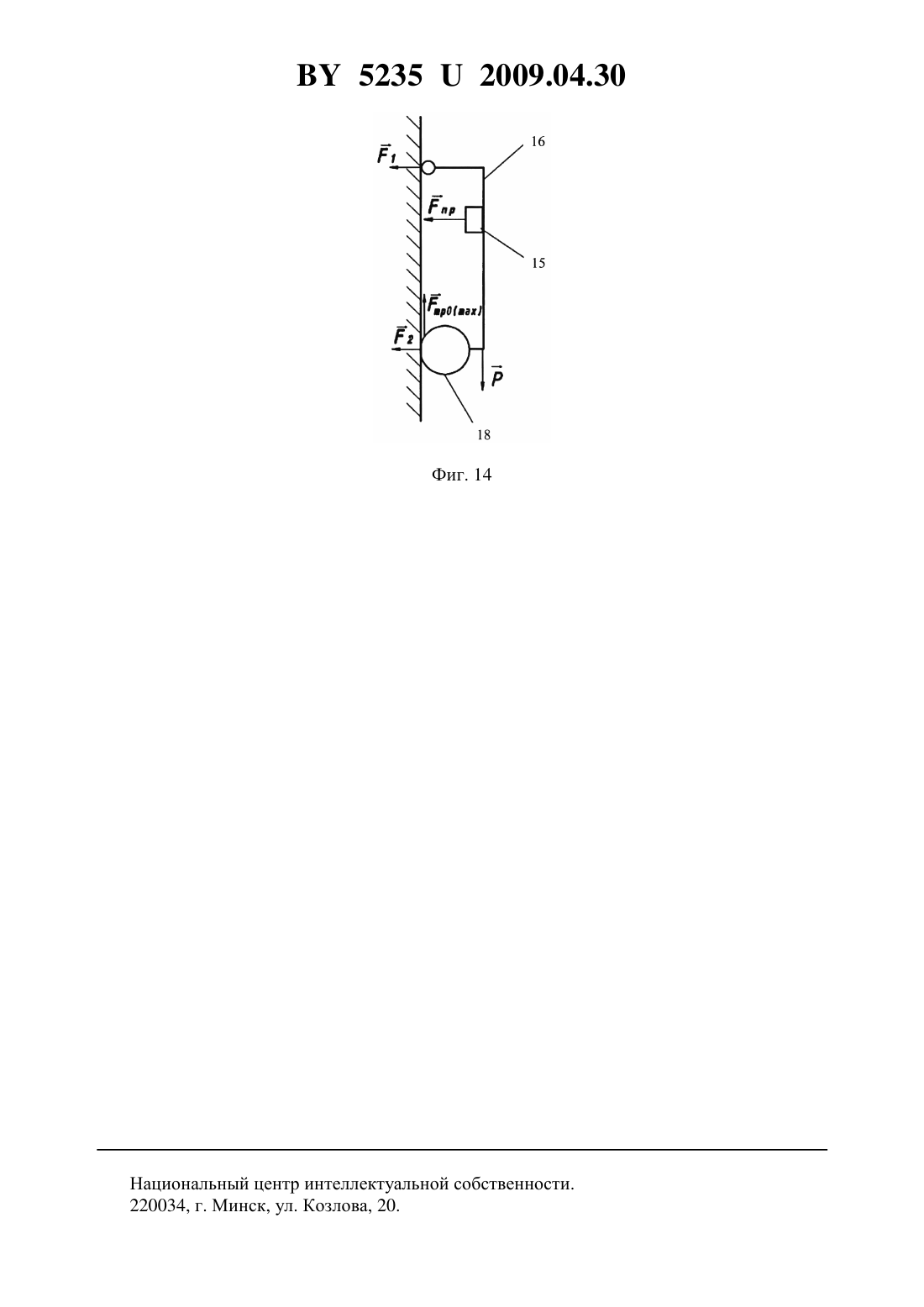
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ВЕРТИКАЛЬНЫМ ПОВЕРХНОСТЯМ, СОДЕРЖАЩЕЕ ВАКУУМНЫЙ ЗАХВАТ,И ВАКУУМНЫЙ ЗАХВАТ(71) Заявитель Михальчук Андрей Николаевич(72) Автор Михальчук Андрей Николаевич(73) Патентообладатель Михальчук Андрей Николаевич(57) 1. Вакуумный захват, включающий корпус, в котором размещен модуль создания вакуума, отличающийся тем, что корпус имеет опорную часть, со стороны которой в нем выполнена полость, модуль создания вакуума включает рабочее колесо с ободом и с лопастями, установленное в полости корпуса с возможностью вращения, причем кромка обода рабочего колеса со стороны опорной части корпуса образует торцевое кольцо. 2. Захват по п. 1, отличающийся тем, что торцевое кольцо расположено под углом от 0 до 60 к плоскости опорной части корпуса. 3. Захват по п. 1 или 2, отличающийся тем, что рабочее колесо установлено в полости корпуса таким образом, что отношение максимального расстояния от торцевого кольца до опорной части корпуса к диаметру рабочего колеса составляет около 0,031. 4. Захват по любому из пп. 1-3, отличающийся тем, что опорная часть корпуса частично перекрыта узкими пластинами. 5. Захват по любому из пп. 1-4, отличающийся тем, что лопасти рабочего колеса отклонены от радиального направления в сторону, противоположную направлению вращения. 52352009.04.30 6. Устройство для перемещения по вертикальным поверхностям, включающее раму с направляющими и ведущими колесами, на которой установлен вакуумный захват, отличающееся тем, что вакуумный захват включает корпус, имеющий опорную часть, со стороны которой в нем выполнена полость, в которой с возможностью вращения установлено рабочее колесо с ободом и с лопастями, причем кромка обода рабочего колеса со стороны опорной части корпуса образует торцевое кольцо.(56) 1.2073601 1, опубл. 20.02.1997. 2.2312762 1, опубл. 20.12.2007. 3.2057046 1, опубл. 27.03.1996. 4.2283257 С 1, опубл. 10.09.2006. Полезная модель относится к области машиностроения, в частности к транспортным средствам для перемещения грузов и людей по вертикальным поверхностям, способным перемещаться при помощи вакуумного захвата, а также к устройствам для захвата изделий (например уложенных в стопки) при помощи вакуума с последующим их перемещением и укладкой. Из уровня техники известно вакуумное захватное устройство 1, включающее силовой цилиндр с присоской, соединенной с источником избыточного давления и с источником разрежения. Данное устройство позволяет захватывать и перемещать плоские предметы, однако имеет сложную конструкцию и обладает недостаточным быстродействием, поскольку вакуумный насос выполнен в виде отдельного элемента. Кроме того, известна принятая в качестве прототипа для заявленного вакуумного захвата вакуумная захватная головка 2, содержащая присоску и привод ее возвратнопоступательного перемещения, включающий рычаг с инерционной массой. Данное устройство имеет довольно простую, технологичную конструкцию, однако,также обладает рядом недостатков. При опускании и подъеме присоски инерционная масса может повредить захватываемое изделие, кроме того, известная вакуумная захватная головка не может подаваться сбоку, например в условиях ограниченного пространства. Также следует отметить, что присоска, приводимая в действие инерционной массой, создает лишь незначительную степень разрежения и, следовательно, пригодна для захвата только относительно легких изделий. Также из уровня техники известен мобильный шагающий робот 3, содержащий платформу и закрепленные на ней четыре двусторонних пневмоцилиндра с вакуумными захватами. Этот робот, как и другие устройства шагового перемещения, обладает низкой скоростью движения, а также имеет довольно сложную и дорогостоящую конструкцию. Кроме того, известно принятое в качестве прототипа для устройства для перемещения по вертикальным поверхностям транспортное средство для перемещения по произвольно ориентированной поверхности 4, содержащее платформу с вакуумными захватами, установленными на гусеничных механизмах перемещения и соединенными через распределительный механизм с вакуумным насосом. Данное транспортное средство довольно быстроходно, однако имеет весьма сложную конструкцию, что обусловливает его низкую надежность, также степень создаваемого разрежения незначительна, поскольку вакуумный насос выполнен в виде отдельного элемента. Кроме того, оно обладает большими габаритами, что ограничивает его применение в условиях ограниченного пространства. 2 52352009.04.30 Задачей полезной модели является создание вакуумного захвата, конструкция которого была бы компактной, технологичной в изготовлении и обеспечивала бы значительное усилие захвата, а также создание устройства для перемещения грузов и людей по вертикальным поверхностям, имеющего компактную конструкцию и обладающего большой грузоподъемностью за счет особой конструкции вакуумного захвата с большим усилием захвата. Поставленная задача решается предлагаемым вакуумным захватом, включающим корпус, в котором размещен модуль создания вакуума, причем корпус имеет опорную часть, со стороны которой в нем выполнена полость, модуль создания вакуума включает рабочее колесо с ободом и с лопастями, установленное в полости корпуса с возможностью вращения, причем кромка обода рабочего колеса со стороны опорной части корпуса образует торцевое кольцо. В частном случае выполнения торцевое кольцо может быть расположено под углом от 0 до 60 к плоскости опорной части корпуса. Кроме того, рабочее колесо может быть установлено в полости корпуса таким образом, чтобы отношение максимального расстояния от торцевого кольца до опорной части корпуса к диаметру рабочего колеса составляло около 0,031. Опорная часть корпуса может быть частично перекрыта узкими пластинами. Лопасти рабочего колеса могут быть отклонены от радиального направления в сторону, противоположную направлению вращения. Также поставленная задача решается устройством для перемещения по вертикальным поверхностям, включающим раму с направляющими и ведущими колесами, на которой установлен вакуумный захват, причем вакуумный захват включает корпус, имеющий опорную часть, со стороны которой в нем выполнена полость, в которой с возможностью вращения установлено рабочее колесо с ободом и с лопастями, причем кромка обода рабочего колеса со стороны опорной части корпуса образует торцевое кольцо. Достоинства и преимущества заявляемых вакуумного захвата и устройства для перемещения по вертикальным поверхностям будут рассмотрены ниже на возможных предпочтительных, но не ограничивающих примерах реализации со ссылкой на позиции чертежей, на которых изображены фиг. 1 - вакуумный захват, вид сбоку фиг. 2 - вид А на фиг. 1 фиг. 3 - продольный разрез вакуумного захвата фиг. 4 - рабочее колесо, вид сбоку фиг. 5 - вид Б на фиг. 4 фиг. 6 - продольный разрез рабочего колеса фиг. 7-9 - схемы движения воздуха при функционировании вакуумного захвата фиг. 10 - схема формирования стенки вихря фиг. 11 - схема сил, действующих на вакуумный захват фиг. 12 - вид сбоку устройства для перемещения по вертикальным поверхностям фиг. 13 - вид В на фиг. 12 фиг. 14 - схема сил, действующих на устройство для перемещения по вертикальным поверхностям. Вакуумный захват содержит корпус 1 с опорной частью 2, со стороны которой в нем выполнена полость 3. В полости 3 корпуса 1 установлено рабочее колесо 4 с лопастями 5,которое посажено на вал 6, соединенный с электродвигателем 7, который может быть установлен в корпусе 1. Вал может вращаться в подшипниках 8, либо же, в малогабаритных моделях, подшипники могут отсутствовать, поскольку для сохранения работоспособности устройства достаточно будет подшипников двигателя. Деталь крепления 9 (например шпилька, скоба, кронштейн и т.п.), размещенная на корпусе 1 позволяет устанавливать вакуумный захват на различных механизмах, в частности на устройстве для перемещения по вертикальным поверхностям. 3 52352009.04.30 Рабочее колесо 4 (фиг. 4) включает диск 10 с лопастями 5 и ободом 11. Кромка обода 11,на которой отсутствуют лопасти, образует торцевое кольцо 12. Вакуумный захват предназначен для создания притягивающего усилия между рабочим колесом и любым плоским захватываемым предметом, площадь рабочей поверхности которого больше площади рабочего колеса. Вакуумный захват работает следующим образом. При вращении электродвигателем 7 рабочего колеса 4 в холостом режиме, т.е. вдали от поверхности захватываемого предмета, рабочее колесо 4 вращается в направлениии совершает работу по перемещению воздуха от своей центральной части к периферии и далее за ее пределы (фиг. 7). По мере приближения к предмету, некоторая часть отброшенного рабочим колесом 4 воздуха возвращается к поверхности 13 предмета и движется обратно к центральной части колеса (фиг. 8). Но данные частички воздуха обладают импульсом, направленным по касательной к оси вращения колеса, и как следствие возникает вихрь, замкнутый с одной стороны поверхностью предмета, а с другой стороны рабочим колесом, что приводит к возникновению притягивающего усилия между ними. Если продолжать приближение аппарата к предмету, то на некотором расстояниивесь сброшенный рабочим колесом 4 воздух будет возвращаться к центральной части рабочего колеса(фиг. 9) и захватываться образовавшимся вихрем. Между торцевым кольцом 12 рабочего колеса 4 и поверхностью 13 предмета возникнет плотное кольцо воздуха - стенка вихря 14(фиг. 10). В результате прекращается приток внешнего воздуха к центру вихря, давление воздуха в области межу рабочим колесом и предметом падает - возникает вакуумная подушка 15. При этом работа, совершаемая рабочим колесом 4 по перемещению воздуха,снижается до минимума и оно начинает работать как маховик, вследствие чего скорость вращения значительно возрастает, вихрь усиливается, а притягивающее усилие между рабочим колесом 4 и поверхностью предмета достигает максимального значения. Торцевое кольцо 12 рабочего колеса 4 располагается под определенным углом к плоскости, что позволяет устанавливать требуемый угол сброса воздуха . Наилучший эффект вакуумной подушки достигается при значении данного угла 0, поскольку в этом случае отсутствует реактивная сила 2, отталкивающая вакуумный захват от захватываемого предмета. Однако, поскольку рабочая поверхность захватываемого предмета может иметь значительные неровности, оптимальным является расположение торцевого кольца под углом 060. Это позволяет увеличить расстояние между рабочим колесом 4 и захватываемым предметом, при котором наступает эффект вакуумной подушки. Но необходимо учитывать, что чем больше угол , тем больше реактивная сила 2, т.е. общая притягивающая сила становится меньше. Для предотвращения касания рабочим колесом 4 поверхности 13 захватываемого предмета (захватываемый предмет должен контактировать только с опорной частью корпуса), между плоскостью, которую образует опорная часть 2 корпуса 1, и торцевым кольцом 12 рабочего колеса 4, должно быть определенное расстояние, не превышающее 3 от диаметра рабочего колеса 4. Если захватываемым предметом является тонкий лист, который может деформироваться под воздействием вакуумного захвата, то опорную часть 2 корпуса 1 можно перекрыть одной или несколькими узкими пластинами (на чертеже не показаны). Устройство для перемещения по вертикальным поверхностям содержит несущую раму 16, направляющую пару колес 17 и шипованное ведущее колесо 18 (либо колеса), которое приводится в движение электродвигателем 19 посредством червячной передачи 20. Под рамой установлен вакуумный захват 21, содержащий корпус, имеющий опорную часть, со стороны которой в нем выполнена полость, в которой с возможностью вращения от электродвигателя установлено рабочее колесо с лопастями, причем кромка обода рабочего колеса со стороны опорной части корпуса образует торцевое кольцо. Более подробно конструкция и принцип действия вакуумного захвата описаны выше. Электрический ток к 4 52352009.04.30 электродвигателю 19 и к электродвигателю вакуумного захвата подается с блока питания и управления 22. Ходовая часть при этом может быть как колесной, так и гусеничной,а материал, из которого выполнены колеса или гусеницы ходовой части, должен иметь максимальный коэффициент трения покоя относительно материала поверхности стены. Кроме того, должен отсутствовать свободный ход под действием веса устройства и полезного груза за счет постоянного сцепления с электродвигателем (например с помощью самотормозящей червячной передачи), который, в свою очередь, должен обладать достаточной мощностью, чтобы устройство могло двигаться вертикально вверх. Устройство для перемещения по вертикальным поверхностям пригодно для перемещения грузов и людей, например, в случае строительно-монтажных или ремонтных работ, а также в случае пожара или других чрезвычайных ситуаций в многоэтажных зданиях для эвакуации людей и доставки пожарной техники к месту возгорания. Кроме того, устройство для перемещения по вертикальным поверхностям может выполнять роль детской игрушки. На устройство для перемещения по вертикальным поверхностям действуют следующие основные силы (фиг. 14) сила притяжения (пр), создаваемая вакуумным захватом вес устройства и полезного груза (Р). Через раму сила притяжения (пр) передается на направляющую колесную пару 17(1) и на ведущее колесо 18 (2). Между ведущим колесом и стеной действует сила трения (тр 0), также как и сила притяжения, препятствующая падению аппарата. Таким образом аппарат получает способность двигаться по вертикальной поверхности - стене. Для фиксации ведущего колеса на стене необходимо выполнение следующего условия тр 0 Ртр 00 2,где тр 0 - предельная сила трения покоя 0 - коэффициент трения покоя. Таким образом, имея простую и технологичную конструкцию, вакуумный захват обеспечивает значительное усилие захвата за счет размещения источника вакуума непосредственно в корпусе устройства и особой конструкции рабочего колеса. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: B62D 57/00, B25J 15/06
Метки: содержащее, поверхностям, вертикальным, перемещения, устройство, захват, вакуумный
Код ссылки
<a href="https://by.patents.su/8-u5235-ustrojjstvo-dlya-peremeshheniya-po-vertikalnym-poverhnostyam-soderzhashhee-vakuumnyjj-zahvat-i-vakuumnyjj-zahvat.html" rel="bookmark" title="База патентов Беларуси">Устройство для перемещения по вертикальным поверхностям, содержащее вакуумный захват, и вакуумный захват</a>
Захват пилы
Номер патента: U 35
Опубликовано: 30.06.1999
Авторы: Кореневский Валерий Степанович, Зотов Анатолий Валентинович, Коноплев Петр Васильевич, Алейников Александр Евгеньевич
МПК: B27B 3/32
Текст:
...древесины, что снижает долговечность пил. Осуществляя удары по клиньям в процессе натяжения, снижается долговечность механизмов привода, шарниров. Задачей является повышение долговечности пил, а также механизмов привода, шарниров. Поставленная задача решается так, что в захвате пилы включающим механизм натяжения, рычаг, пластину для удержания полотна, механизм натяжения выполнен в виде винта, который основанием упирается на упор, установленный...
Захват для крепления резинотросовых лент и канатов при испытаниях на разрывной гидравлической машине

Номер патента: U 244
Опубликовано: 30.03.2001
Авторы: Прушак Нина Владимировна, Дворник Александр Петрович, Белько Сергей Леонидович, Щерба Татьяна Павловна, Барановский Анатолий Леонидович, Конопляник Алла Владимировна
МПК: G01N 3/04
Метки: разрывной, гидравлической, захват, машине, крепления, лент, испытаниях, резинотросовых, канатов
Текст:
...лент и канатов при испытаниях на разрывной гидравлической машине, содержащий неподвижную и подвижную зажимные части,размещенные между ними последовательно устанавливаемые вдоль зажимной поверхности неподвижной части элементы, вокруг которых запасовывается испытываемый образец, причем подвижная зажимная часть выполнена в виде рычага с прикрепленной к нему болтами сферической опорой, одним концом рычаг шарнирно крепится к стойке неподвижной...
Опора качения с вертикальным валом
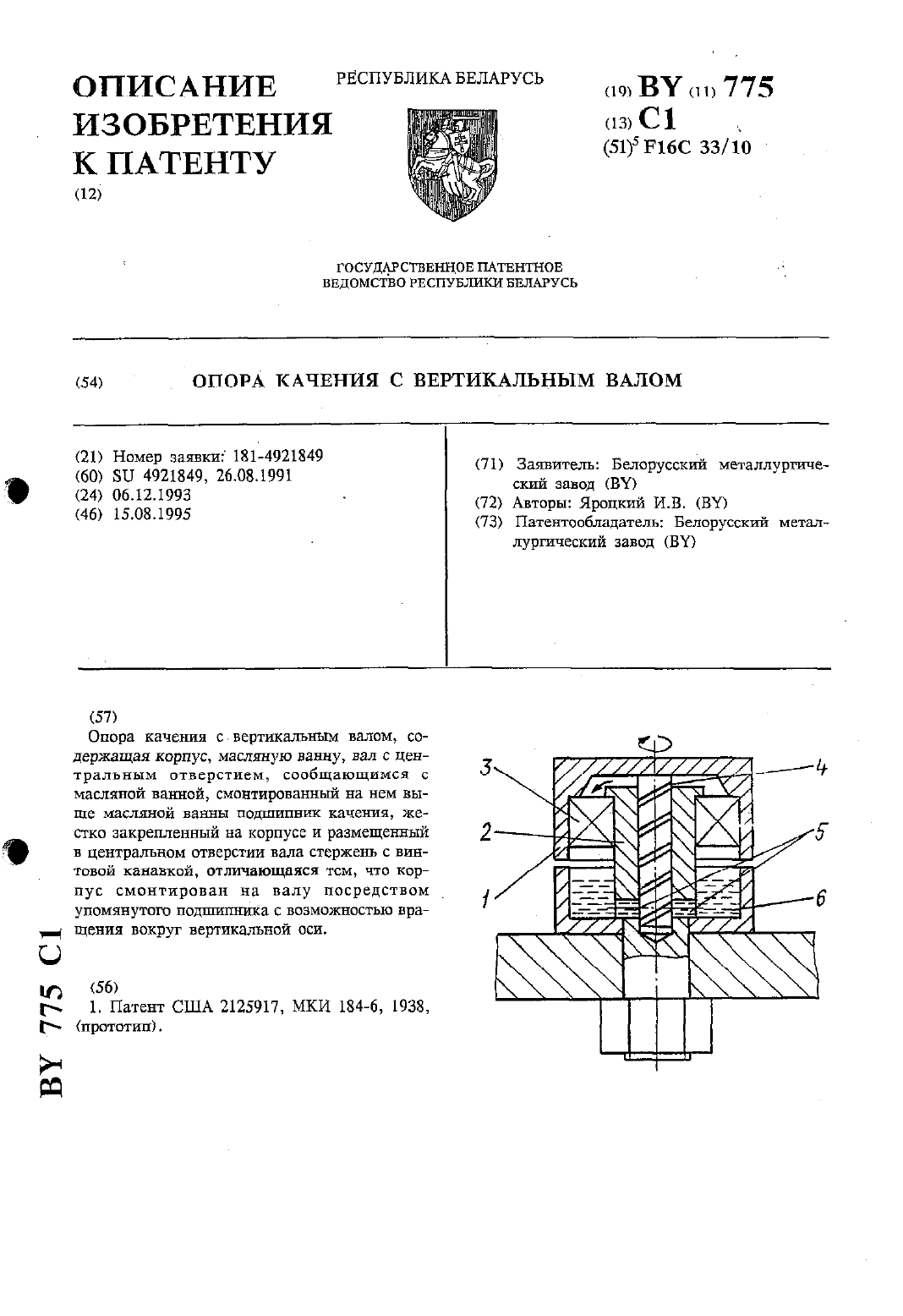
Номер патента: 775
Опубликовано: 15.08.1995
Автор: Яроцкий И. В.
МПК: F16C 33/10
Метки: валом, качения, опора, вертикальным
Текст:
...корпус, смонтированный на валу с помощью подшипников качения и закрытый 2-мя крышками глухой и с проходным отверстием.Недостатком данной конструкции является вытекание смазки из корпуса опоры через упЛОГЦСНИЫ, ЧТО бЗ СС РСГУДШРЦОГО ПОПОЛНЕНИЯ приводит к выходу из строя подшипников опорЫ.В качестве прототипа выбрана конструкция опоры качения с вертикальным валом, содержащая неподвижный корпус, в котором с поМОЩЬЮ ПОДШИПНИК КЗЧЕНИЯ...
Захват для брёвен
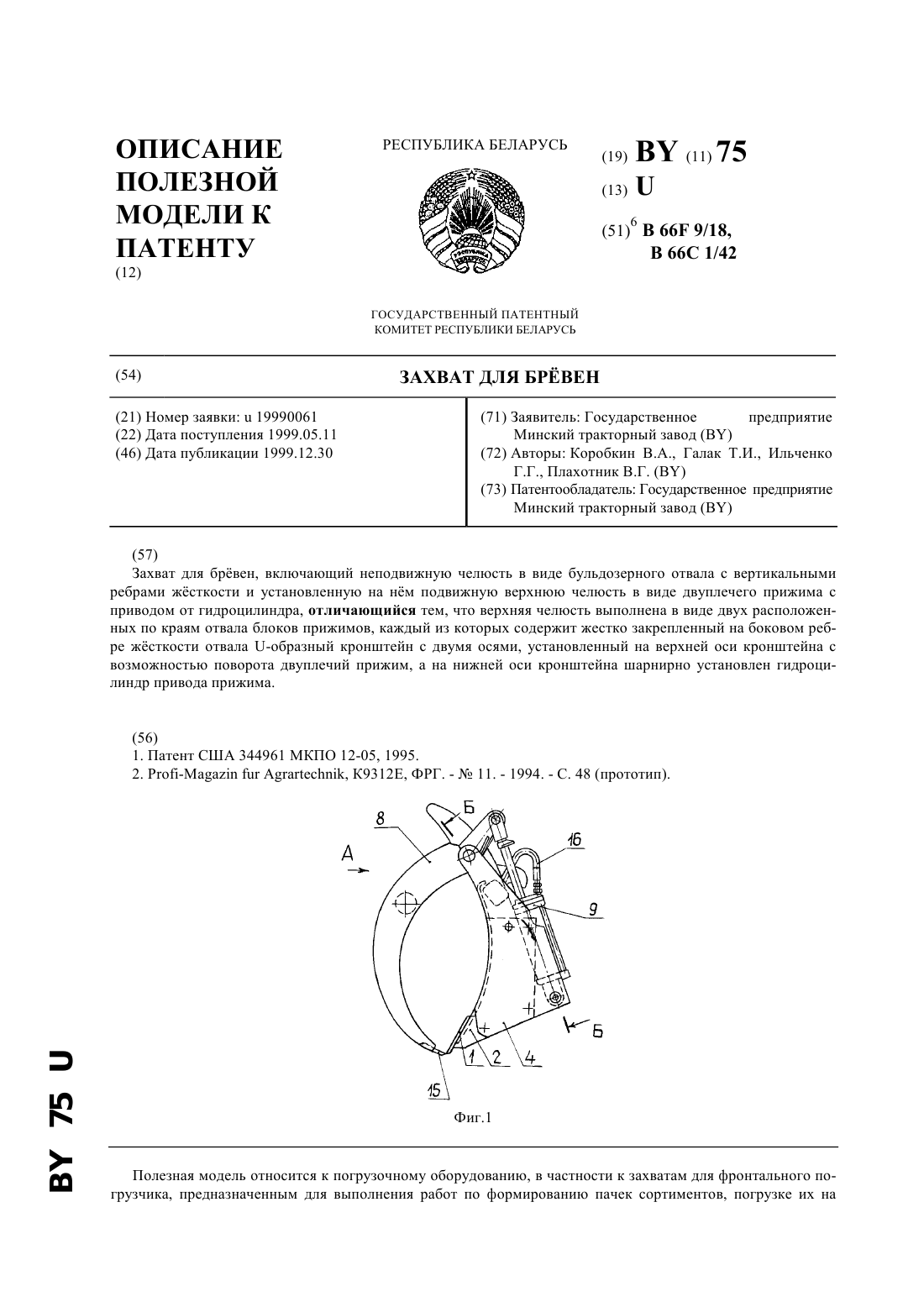
Номер патента: U 75
Опубликовано: 30.12.1999
Авторы: Плахотник Василий Григорьевич, Галак Тамара Иосифовна, Коробкин Владимир Андреевич, Ильченко Георгий Георгиевич
Текст:
...из которых содержит жестко закрепленный на боковом ребре жсткости отвала -образный кронштейн с двумя осями, установленные с возможностью поворота на верхней оси кронштейна двуплечий прижим, а на нижней оси -гидроцилиндр привода, кинематически соединнный с одним плечом прижима. Отличительными признаками предлагаемой полезной модели является выполнение верхней челюсти в виде двух блоков прижимов, включающих жестко закрепленные на боковых...
Автоматический захват для штучных грузов
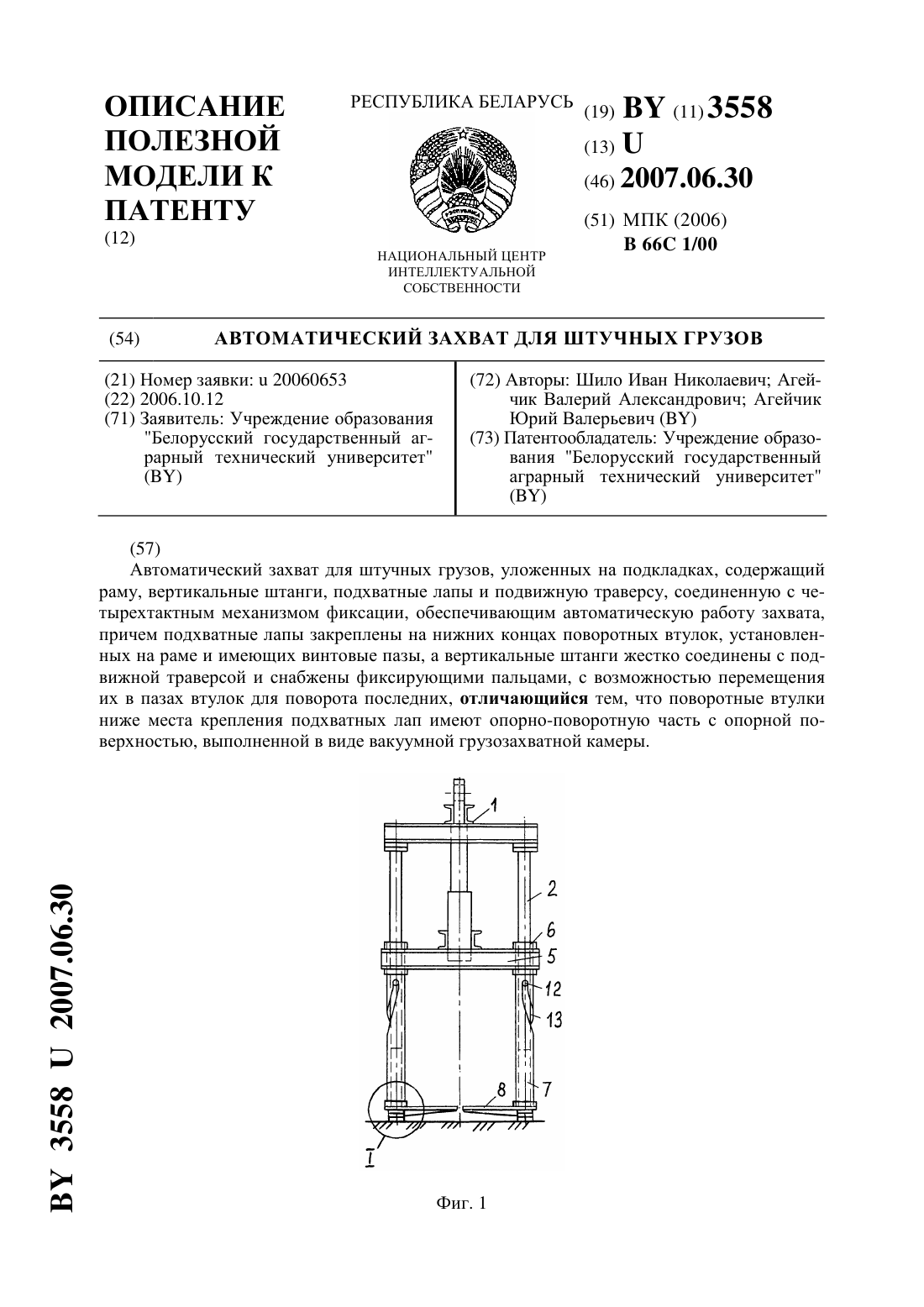
Номер патента: U 3558
Опубликовано: 30.06.2007
Авторы: Шило Иван Николаевич, Агейчик Валерий Александрович, Агейчик Юрий Валерьевич
МПК: B66C 1/00
Метки: штучных, захват, грузов, автоматический
Текст:
...автоматическую работу захвата, причем подхватные лапы закреплены на нижних концах поворотных втулок, установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими пальцами, с возможностью перемещения их в пазах втулок для поворота последних, где поворотные втулки ниже места крепления подхватных лап имеют опорно-поворотную часть с опорной поверхностью,...
Предыдущий патент: Гидродинамическое устройство для движения по воде
Следующий патент: Устройство для холодного формообразования спиралевидных труб
Случайный патент: Автоматизированный дискретный дозатор комбикормов