B25J 11/00 — Манипуляторы, не отнесенные к другим рубрикам
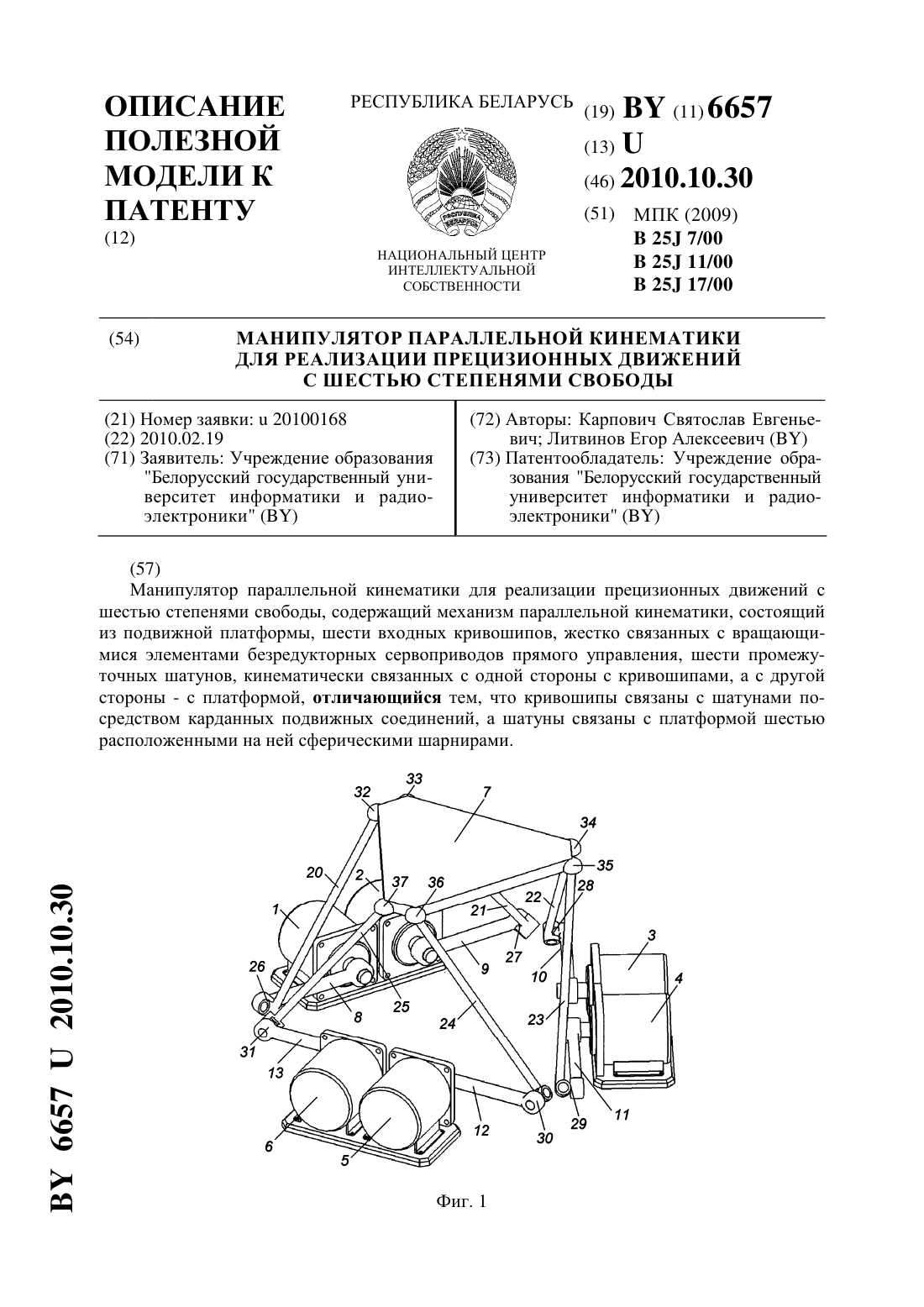
Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы
Номер патента: U 6657
Опубликовано: 30.10.2010
Авторы: Литвинов Егор Алексеевич, Карпович Святослав Евгеньевич
МПК: B25J 11/00, B25J 17/00, B25J 7/00...
Метки: движений, кинематики, прецизионных, манипулятор, свободы, степенями, шестью, параллельной, реализации
Текст:
...связаны с шатунами посредством карданных подвижных соединений, а шатуны связаны с платформой шестью расположенными на ней сферическими шарнирами. Технический результат состоит в объективной способности формирования манипулятором прецизионных, одновременно по трем координатным направлениям и трем ориентациям, с высокими динамическими характеристиками, движений с шестью степенями свободы объекта в пространстве. 66572010.10.30 Данный...
Способ определения положения измерительной головки манипулятора

Номер патента: 5419
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 11/00
Метки: манипулятора, определения, головки, способ, измерительной, положения
Текст:
...(2) преобразуют выражения (3) и (4) к виду х 23( 23 ) 3(6) Выражения (5) и (6) в матричной форме имеют вид где 2 - ошибка отработки обобщенной координаты 2 3 - ошибка отработки обобщенной координаты 3 х - ошибка положения измерительной головки относительно базовой оси х 0 системы координат робота у - ошибка положения измерительной головки относительно базовой оси у 0 системы координат робота. Матрица 22 в правой части матричной записи...
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Черкас Александр Адамович, Филонов Игорь Павлович, Курч Леонид Витальевич, Герасимов Юрий Борисович
МПК: B25J 11/00, B25J 9/16
Метки: манипулятором, управления, способ, промышленного, робота
Текст:
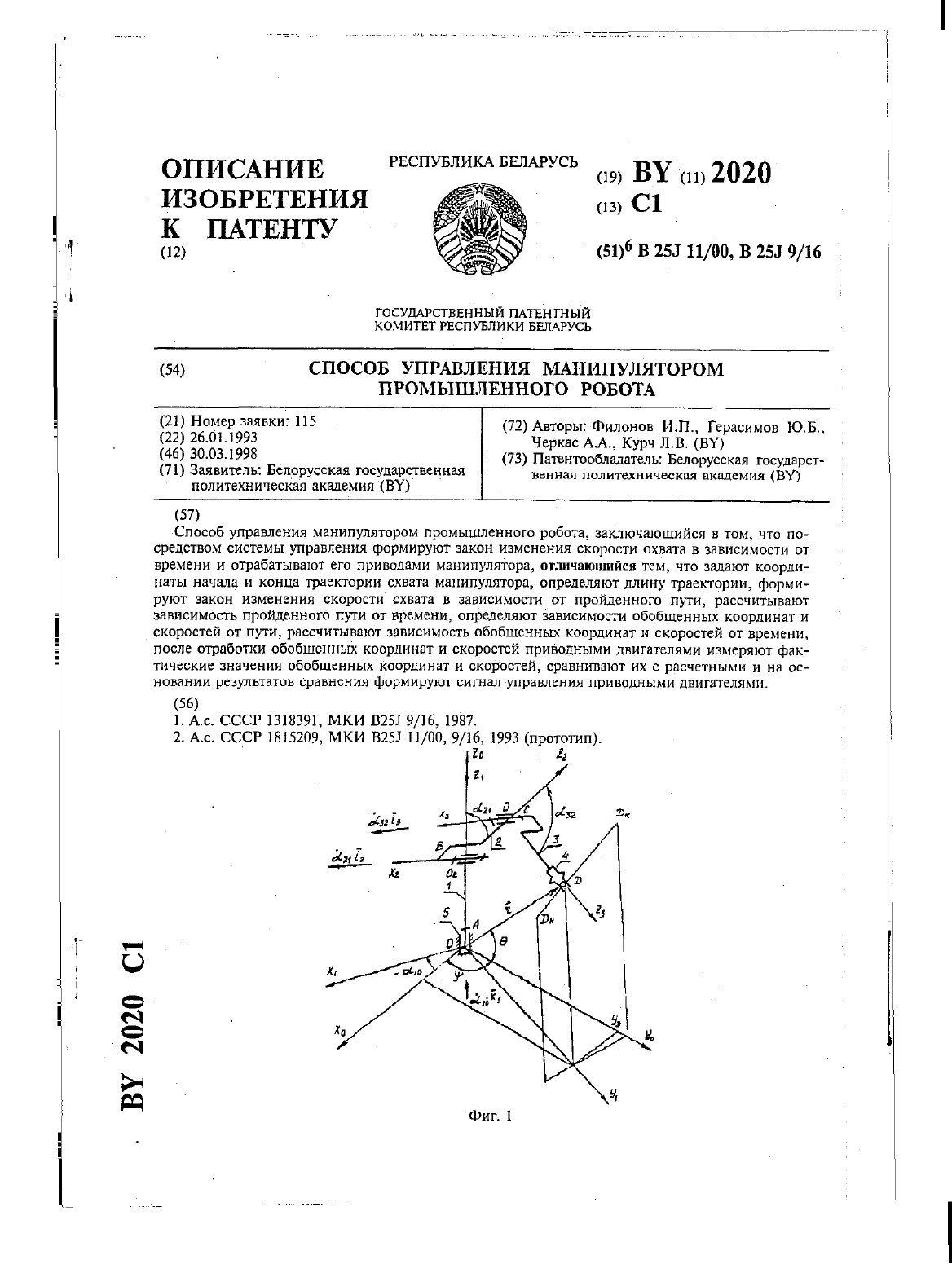
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...