Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Герасимов Юрий Борисович, Филонов Игорь Павлович, Черкас Александр Адамович, Курч Леонид Витальевич
Текст
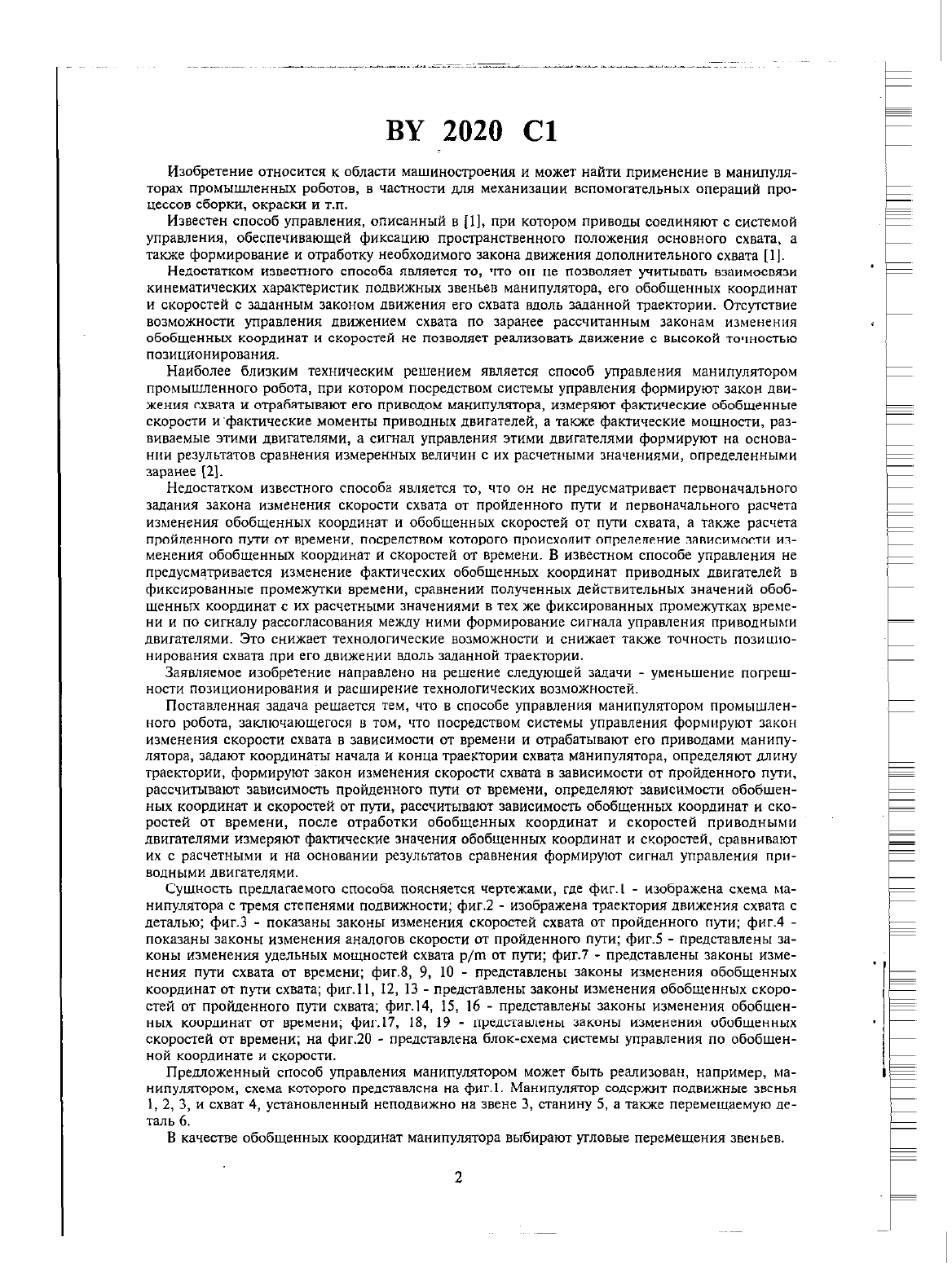
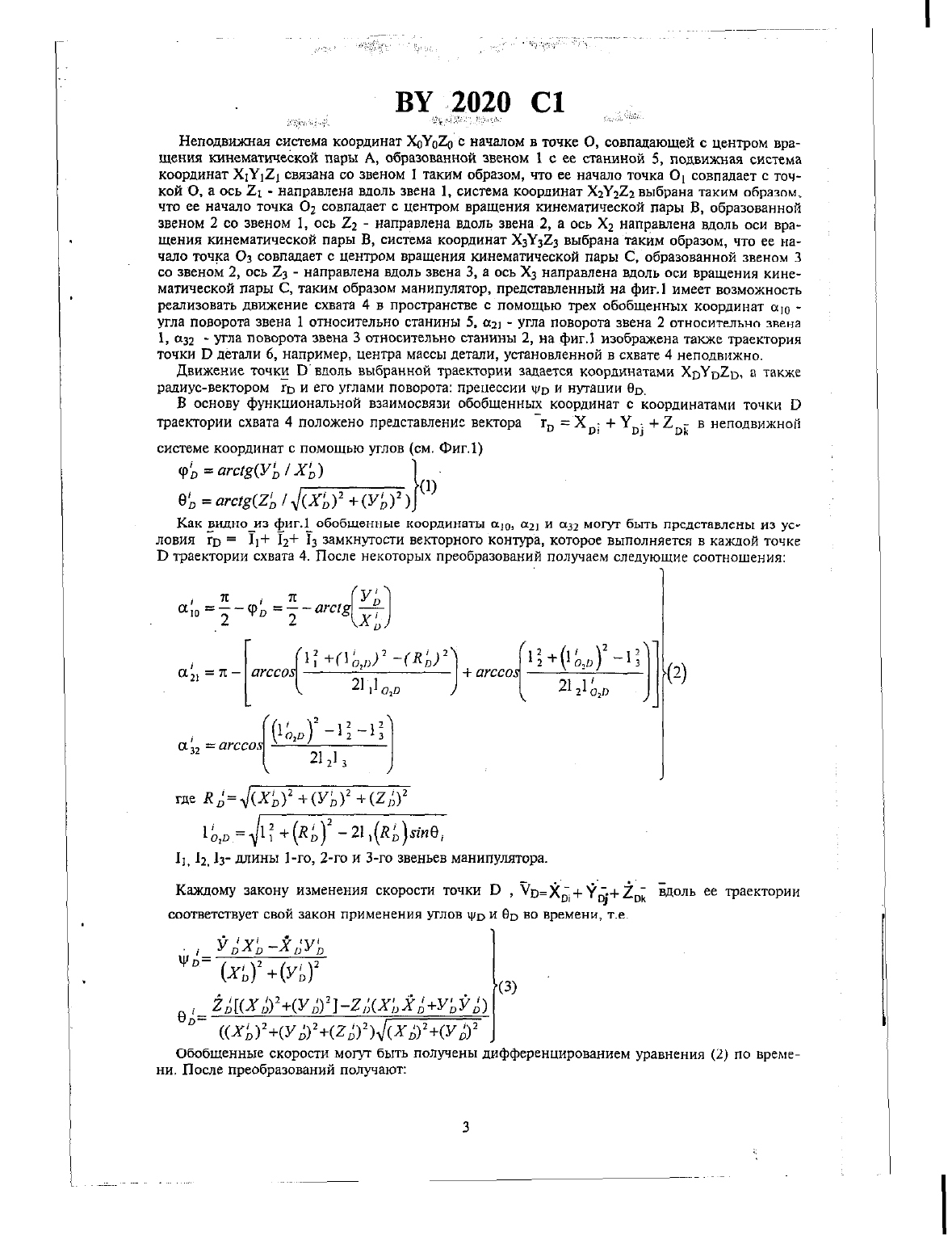
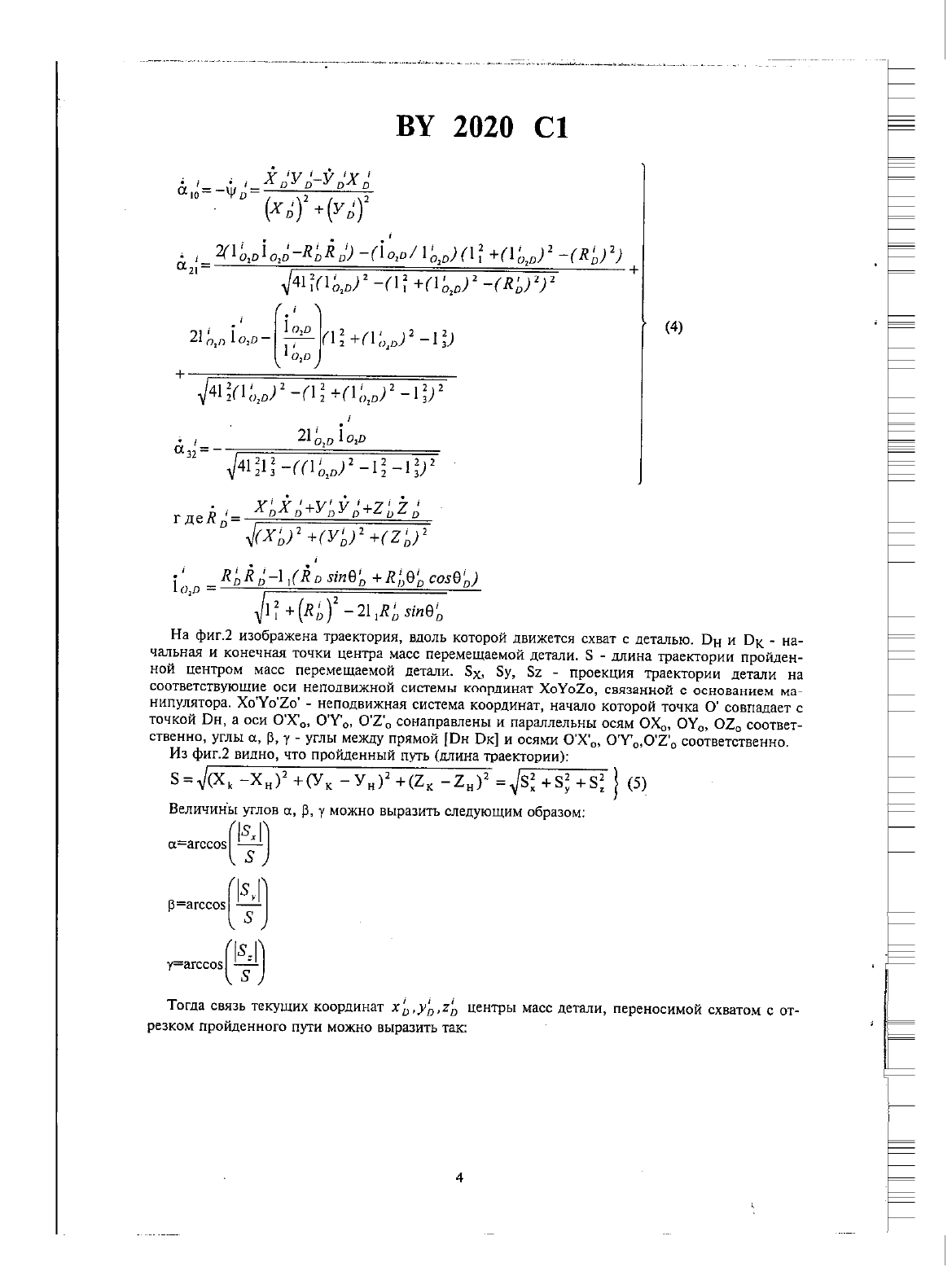
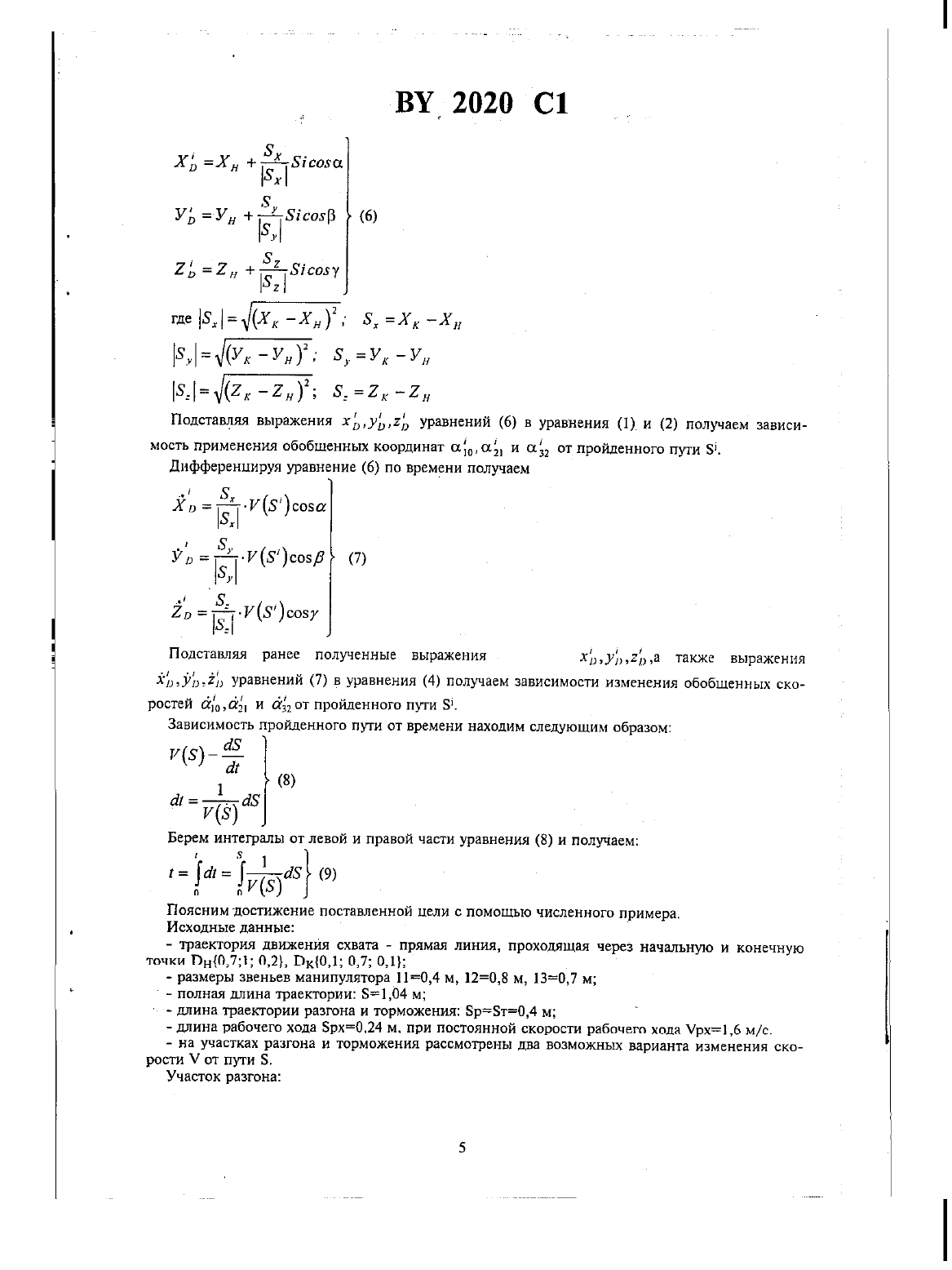
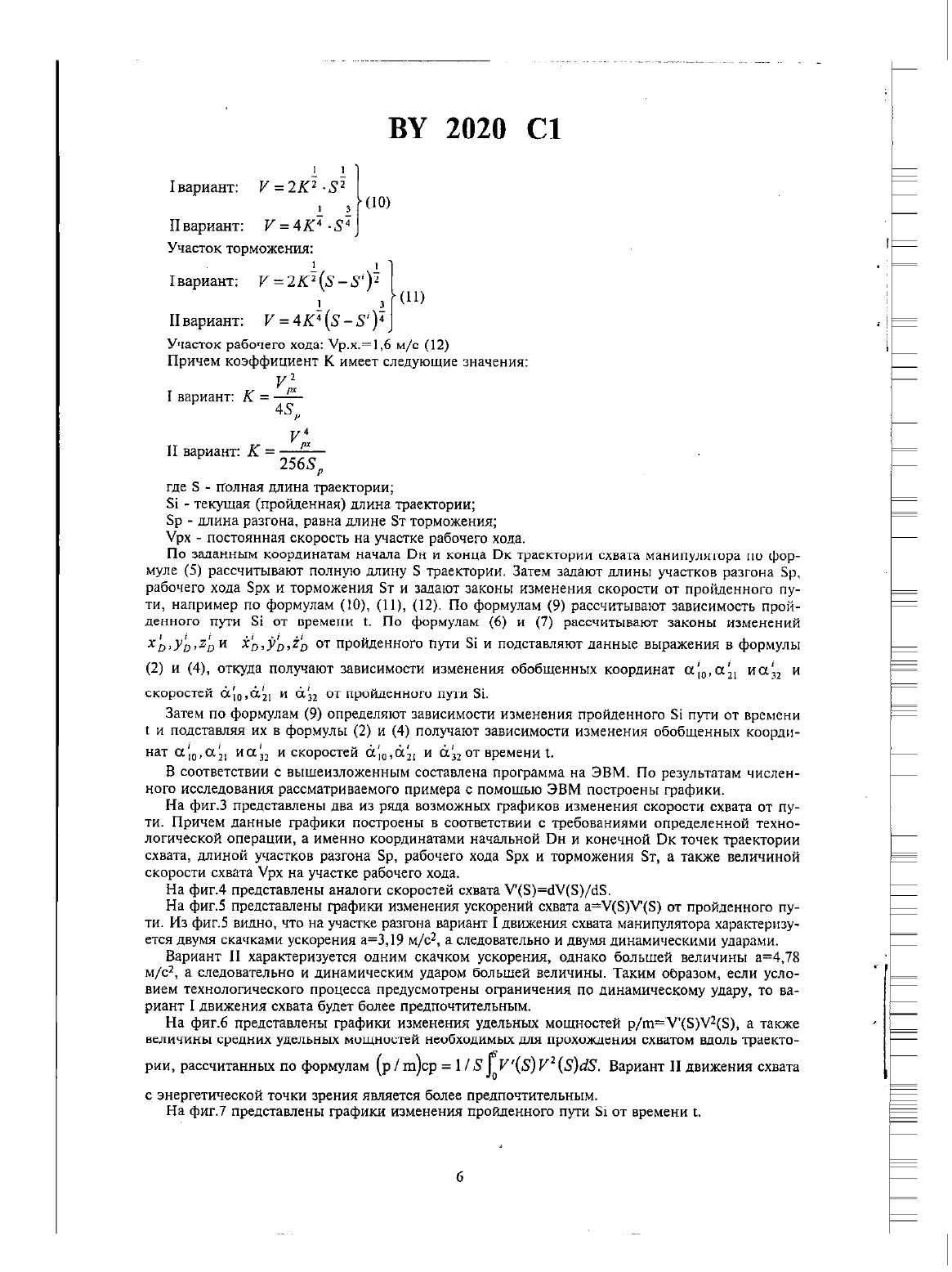
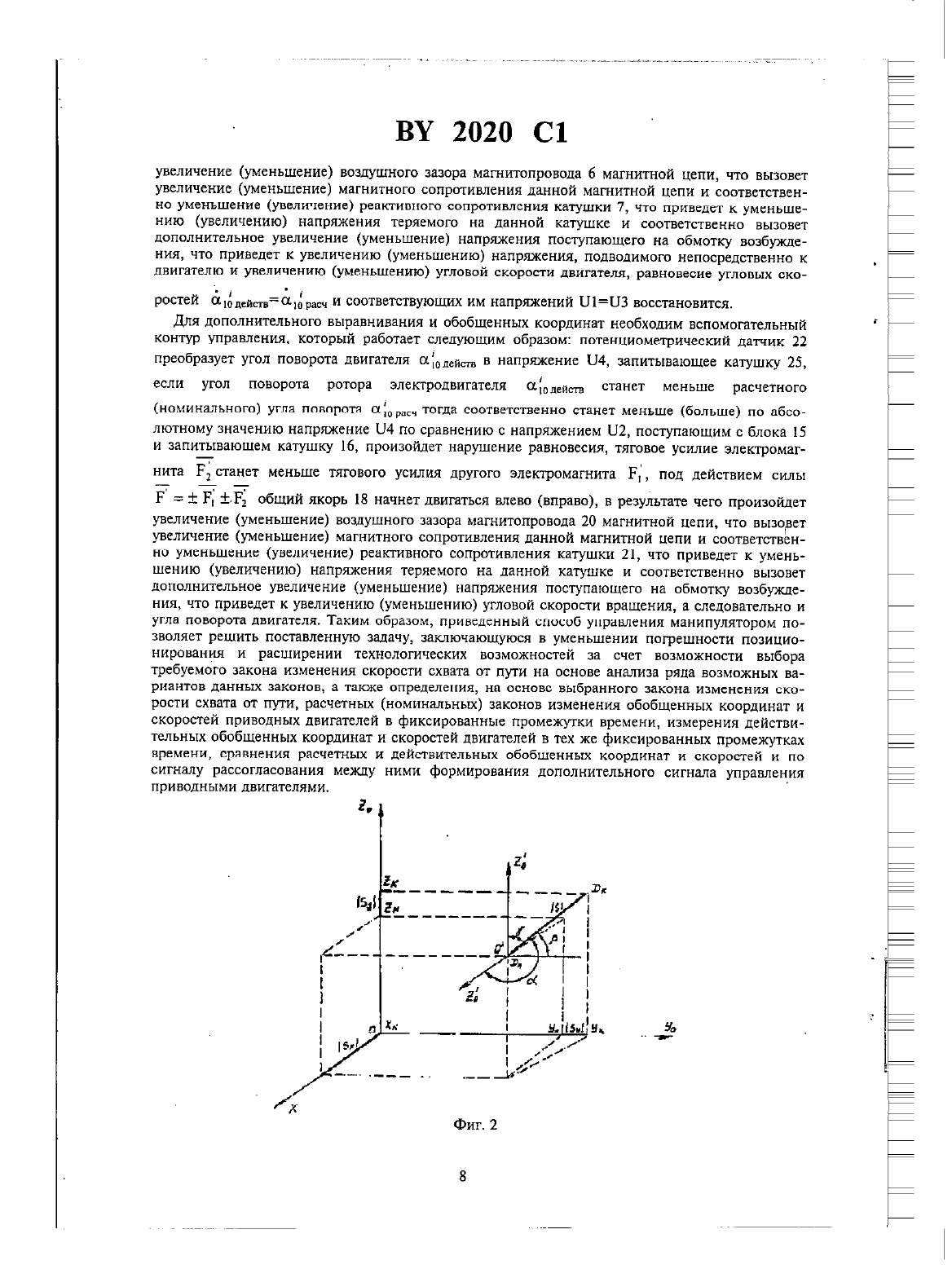
Изобретение относится к области машиностроения и может найти применение в манипуляторах промышленных роботов, в частности для механизации вспомогательных операций процессов сборки, окраски и т.п.Известен способ управления, описанный в 1, при котором приводы соединяют с системой управления, обеспечивающей фиксацию пространственного положения основного схвата, а также формирование и отработку необходимого закона движения дополнительного схвата 1.Недостатком известного способа является то, что он не позволяет учитывать взаимосвязи кинематических характеристик подвижных звеньев манипулятора, его обобщенных координат и скоростей с заданным законом движения его схвата вдоль заданной траектории. Отсутствие возможности управления движением схвата по заранее рассчитанным законам изменения обобщенных координат и скоростей не позволяет реализовать движение с высокой точностью позиционирования.Наиболее близким техническим решением является способ управления манипулятором промышленного робота, при котором посредством системы управления формируют закон движения схвата и отрабатывают его приводом манипулятора, измеряют фактические обобщенные скорости ифактические моменты приводных двигателей, а таюке фактические мощности, развиваемые этими двигателями, а сигнал управления этими двигателями формируют на основании результатов сравнения измеренных величин с их расчетными значениями, определенными заранее 2.Недостатком известного способа является то, что он не предусматривает первоначального задания закона изменения скорости схвата от пройденного пути и первоначального расчета изменения обобщенных координат и обобщенных скоростей от пути схвата, а также расчета пройденного пути от времени, посредством которого происходит определение зависимости изменения обобщенных координат и скоростей от времени, В известном способе управления не предусматривается изменение фактических обобщенных координат приводных двигателей в фиксированные промежутки времени, сравнении Полученных действительных значений обобщенных координат с их расчетными значениями в тех же фиксированных промежутках времени и по сигналу рассогласования гиежду ними формирование сигнала управления приводными двигателями. Это снижает технологические возможности и снижает таюке точность позиционирования схвата при его движении вдоль заданной траектории.Заявляемое изобретение направлено на решение следующей задачи - уменьшение погрешности позиционирования и расширение технологических возможностей.Поставленная задача решается тем, что в способе управления манипулятором промышленного робота, заключающегося в том, что посредством системы управления формируют закон изменения скорости схвата в зависимости от времени и отрабатывают его приводами манипулятора, задают координаты начала и конца траектории схвата манипулятора, определяют длину траектории, формируют закон изменения скорости схвата в зависимости от пройденного пути,рассчитывают зависимость пройденного пути от времени, определяют зависимости обобщенных координат и скоростей от пути, рассчитывают зависимость обобщенных координат и скоростей от времени, после отработки обобщенных координат и скоростей приводными двигателями измеряют фактические значения обобщенных координат и скоростей, сравнивают их с расчетными и на основании результатов сравнения формируют сигнал управления приводными двигателями.Сущность предлагаемого способа поясняется чертежами, где фиг.1 - изображена схема манипулятора с тремя степенями подвижности фиг.2 - изображена траектория движения схвата с деталью фиг.3 - показаны законы изменения скоростей схвата от пройденного пути фиг.4 показаны законы изменения аналогов скорости от пройденного пути фиг.5 - представлены законы изменения удельных мощностей схвата р/т от пути фиг.7 - представлены законы изменения пути схвата от времени фиг.8 9, 10 - представлены законы изменения обобщенных координат от пути схвата фиг.11, 12, 13 - представлены законы изменения обобщенных скоростей от пройденного пути схвата фиг 14 15, 16 - представлены законы изменения обобщенных координат от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую деталь 6.В качестве обобщенных координат манипулятора выбирают угловые перемещения звеньев.Неподвижная система координат ХдУо 2 о с началом в точке О, совпадающей с центром вращения асинематической пары А, образованной звеном 1 с ее станиной 5, подвижная система координат Х 1 У 121 связана со звеном 1 таким образом, что ее начало точка 01 совпадает с точкой О, а ось 21 - направлена вдоль звена 1, система координат ХУ 22 выбрана таким образом,что ее начало точка О совпадает с Центром вращения кинематической пары В, образованной звеном 2 со звеном 1, ось 22 - направлена вдоль звена 2, а ось Х направлена вдоль оси вращения кинематической пары В, система координат Х 3 У 323 выбрана таким образом, что ее начало точка 03 совпадает с центром вращения кинематической пары С, образованной звеном 3 со звеном 2, ось 23 - направлена вдоль звена 3, а ось Х направлена вдоль оси вращения кинематической пары С, таким образом манипулятор, представленный на фиг.1 имеет возможность реализовать движение схвата 4 в пространстве с помощью трех обобщенных координат осш угла поворота звена 1 относительно станины 5, ад - угла поворота звена 2 относительно звена 1, 0.32 - угла поворота звена 3 относительно станины 2, на фил изображена также траектория точки 1) детали 6, например, центра массы детали, установленной в охвате 4 неподвижно.Движение точки П вдоль выбранной траектории задается координатами ХрУд 2 р, а также радиус-вектором Гр и его углами поворота прецессии жид и нутации едВ основу функциональной взаимосвязи обобщенных координат с координатами точки Втраектории охвата 4 положено представление вектора гв Х В УВ 21) в неподвижнойКак видноизобобщенные координаты всю, сед и 032 могут быть представлены из условия гр 1 д 12 13 замкнутости векторного контура, которое выполняется в каждой точке В траектории схвата 4. После некоторых преобразований получаем следующие соотношенияос Ер Еагс 13(Х ю в ХКаждому закону изменения скорости точки В ЪХЕЪЕВ вдоль ее траектории соответствует свой закон применения углов кип и 633 во времени, т.еОбобщенные скорости могут быть получены дифференцированием уравнения (2) по времени. После преобразований получают1(1 г,)2-2111 г,лпе, На фиг.2 изображена траектория, вдоль которой движется охват с деталью. Вы и Пк - на- 1 чальная и конечная точки центра масс перемещаемой детали. 5 - длина траектории пройден- ной центром масс перемещаемой детали. Зх, Бу, 2 - проекция траектории детали на соответствующие оси неподвижной системы координат ХоУо 2 о, связанной с основанием манипулятора. Хоо 2 о - неподвижная система координат, начало которой точка О совпадает с точкой Вн, а оси ОХ 0 02, сонаправленьт и параллельны осям ОХд, ОУО, 020 соответственно, углы ос, В, у - углы между прямой Вн Вк и осями ОХ, ОУО 2 соответственно.Из фиг.2 видно, что пройденный путь (длина траектории)Величины углов а, 13, у можно выразить следующим образомТОГДЗ. СВЯЗЬ ТЕКУЩИХ КООРДИНЗТ хЬуЬ 2 Ь ЦСНТРЫ масс ДЕТЭЛИ, переносимой СХВЗТОМ С ОТРВЗКОМ ПРОЙДЕННОГО ПУТИ МОЖНО ВЫрЗЗИТЬ так А 1Подставляя выражения хьуьдь уравнений (б) в уравнения (1) и (2) получаем зависи мость применения обобщенных координат оцшосз, и осад от пройденного пути 5. Дифференцируя уравнение (6) по времени получаемПодставляя ранее полученные выражения ху,2 а также выраженияХьдьдя, уравнений (7) в уравнения (4) получаем зависимости изменения обобщенных скоростей Щшо, и 6952 от пройденного пути 5. Зависимость пройденного пути от времени находим следующим образомБерем интегралы от левой и правой части уравнения (8) и получаемПоясним достижение поставленной цели с помощью численного примера. Исходные данные- траектория движения охвата - прямая линия, проходящая через начальную и конечную- размеры звеньев манипулятора 11 О,4 м, 12 О 8 м, 13 О,7 м- полная длина траектории 51,04 мо - длина траектории разгона и торможения 5 ртО,4 м- длина рабочего хода 5 рх 024 м, при постоянной скорости рабочего хода /рх 16 м/с.- на участках разгона и торможения рассмотрены два возможных варианта изменения скорости У от пути 5, Участок разгона
МПК / Метки
МПК: B25J 11/00, B25J 9/16
Метки: манипулятором, робота, способ, управления, промышленного
Код ссылки
<a href="https://by.patents.su/14-2020-sposob-upravleniya-manipulyatorom-promyshlennogo-robota.html" rel="bookmark" title="База патентов Беларуси">Способ управления манипулятором промышленного робота</a>
Способ автоматического управления процессом ввода добавок в готовый продукт
Номер патента: 703
Опубликовано: 30.06.1995
Авторы: Бурштейн С. М., Вишняк Б. А.
МПК: G05D 7/00
Метки: способ, процессом, автоматического, ввода, добавок, управления, продукт, готовый
Текст:
...на коэффициент, отражающий удельную норму добавки на единицу продукта. Полученный сигнал расхода добавки .Т является заданием алгоблоку МПК. управляющего исполнительным механизмом 7 изменения расхода добавки. Сигнал управления исполнительным механизмом 7 формируется при сравнении в МПК сигнала расхода добавки 11 и продифферснцированного сигнала датчика уровня 12. Регулирующий орган 8 изменяет свое положение в зависимости от величины и знака...
Способ управления процессом обезвоживания суспензии
Номер патента: 105
Опубликовано: 30.09.1994
Авторы: Аношин А. И., Бурштейн С. М., Вишняк Б. А., Лемещенко В. С.
МПК: B01D 21/00, B01D 37/00
Метки: обезвоживания, управления, суспензии, способ, процессом
Текст:
...к отрицательному скорость ленты снижается ниже этого значениям при увеличенииабсоПЮТНОГО значения отрицательного сигнала до максимальной величины скорость снижается ДО МИНИМЭПЬНО допустимого-значения. Подачу теплоносителя в паровую рубашку выполняют регулятором 22 в зависиМОСТИ 01 сигнала датчика 21 ВЛЗЖНОСТИ КЕКЭ и корректирующего сигнала скорости движения ленты вакуум-фильтра. Последний сигнал. поступающий на регулятор 22 с выхода...
Способ автоматического управления параллельно работающими сушильными агрегатами
Номер патента: 106
Опубликовано: 30.09.1994
Авторы: Аношин А. И., Вишняк Б. А., Бурштейн С. М., Сорокин В. Г., Волчок С. Ф.
МПК: F26B 25/22
Метки: автоматического, параллельно, сушильными, управления, работающими, агрегатами, способ
Текст:
...25 и регули рующие органы 20. 26. обеспечивающие изме нение расхода топлива и исходноГО МЭТЕРИЭЛЭ. компенсирующихотклонениятекущихзначений. Ълажностей высушенного материала от заданного значения на каждом сушильном агрегате. Способ управления испытан в промышленных условиях на трех параллельно работающих барабанных сушилках на СОФ 4 РУ но. Бепорускалий. в Схема автоматизации смонтирована на базе микропроцессорного контроллера Р 110 и...
Способ автоматического управления процессом сушки
Номер патента: 674
Опубликовано: 30.06.1995
Авторы: Вишняк Б. А., Бурштейн С. М., Аношин А. И.
МПК: F26B 21/06
Метки: сушки, управления, процессом, способ, автоматического
Текст:
...на последующем технологическом процессе продукта с учетом сигнала расхода высушенного продукта и заданного значения сигнала температуры смешанного продуктаСуть решения задачи управления температурой в кипящем слое сводится к следУЮЩему. Уравнение теплового баланса процесса смешивания по текущим значениям расходов высушенного продукта Рви и отработавшего на последующем технологическом процессе продукта Бди с учетом их температур, расхода и...
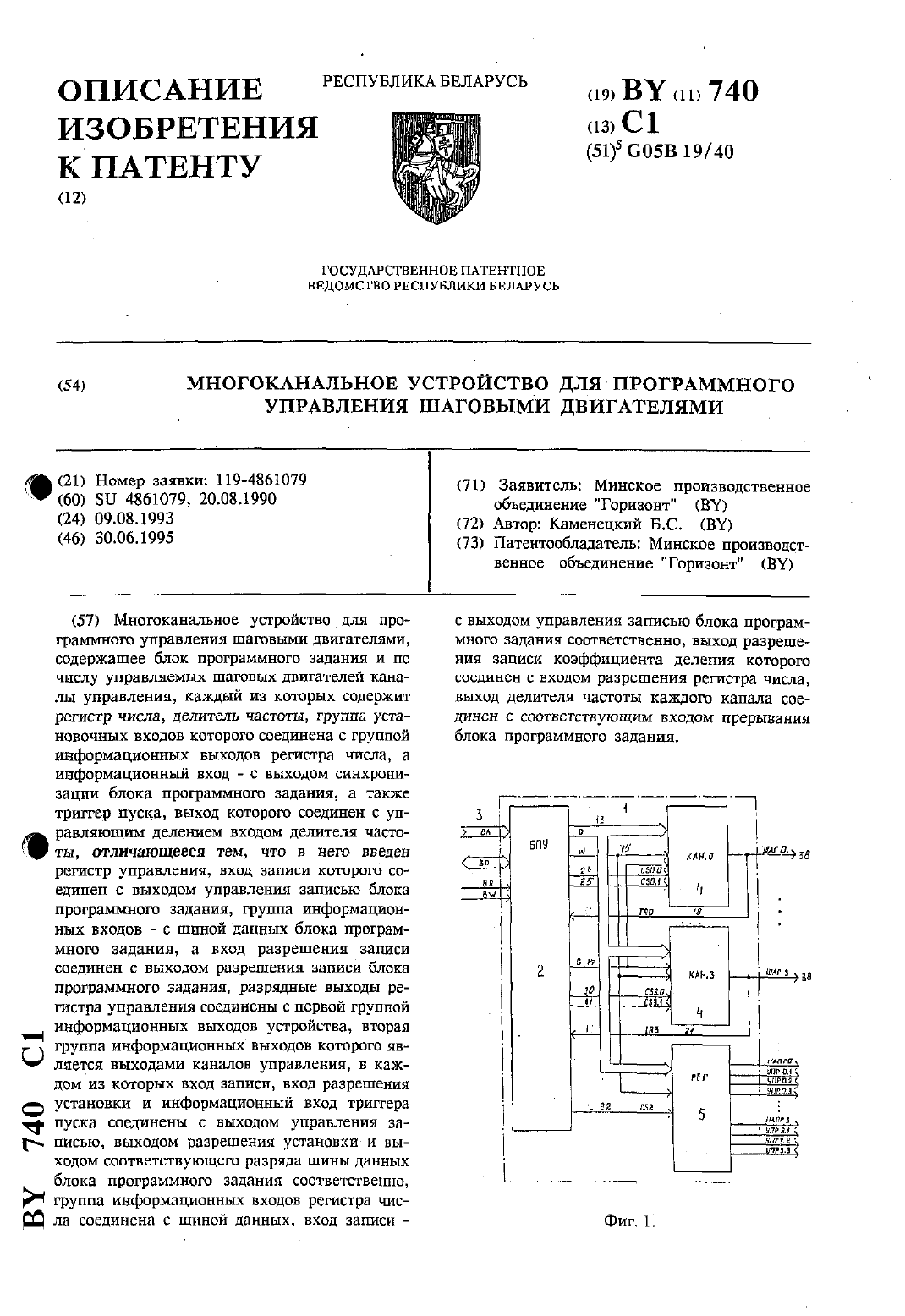
Многоканальное устройство для программного управления шаговыми двигателями
Номер патента: 740
Опубликовано: 30.06.1995
Автор: Каменецкий Б. С.
МПК: G05B 19/40
Метки: программного, двигателями, устройство, многоканальное, управления, шаговыми
Текст:
...канала при поступлении соответствующего прерывания- управление загрузкой регистра 5 управления.Через устройство б ввода-вывода вводится информация, для каждого канала отдельно, о числе шагов, направлении движения, начальной скорости движения, максимальной скорости движения, ускорении, уровне тока в обмотках двигателя и команды управления пользователя (необходимые для привода).Скорость движения двигателя определяется по частоте импульсов,...
Предыдущий патент: Магнитометр
Следующий патент: Электропреобразователь для гальванотехнологии
Случайный патент: Деформационный шов