Тактильный сенсор для робота
Номер патента: U 8599
Опубликовано: 30.10.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
Текст
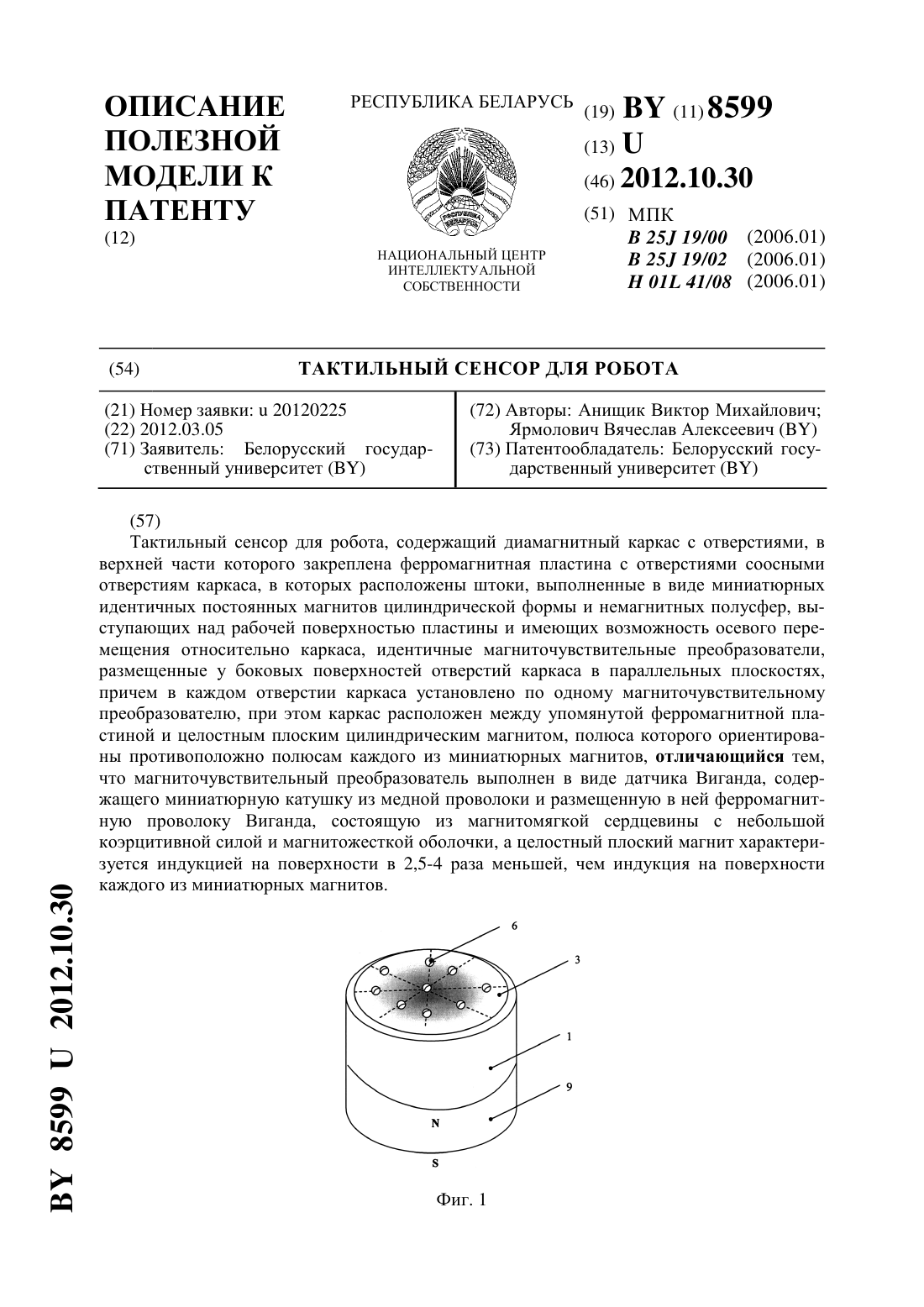
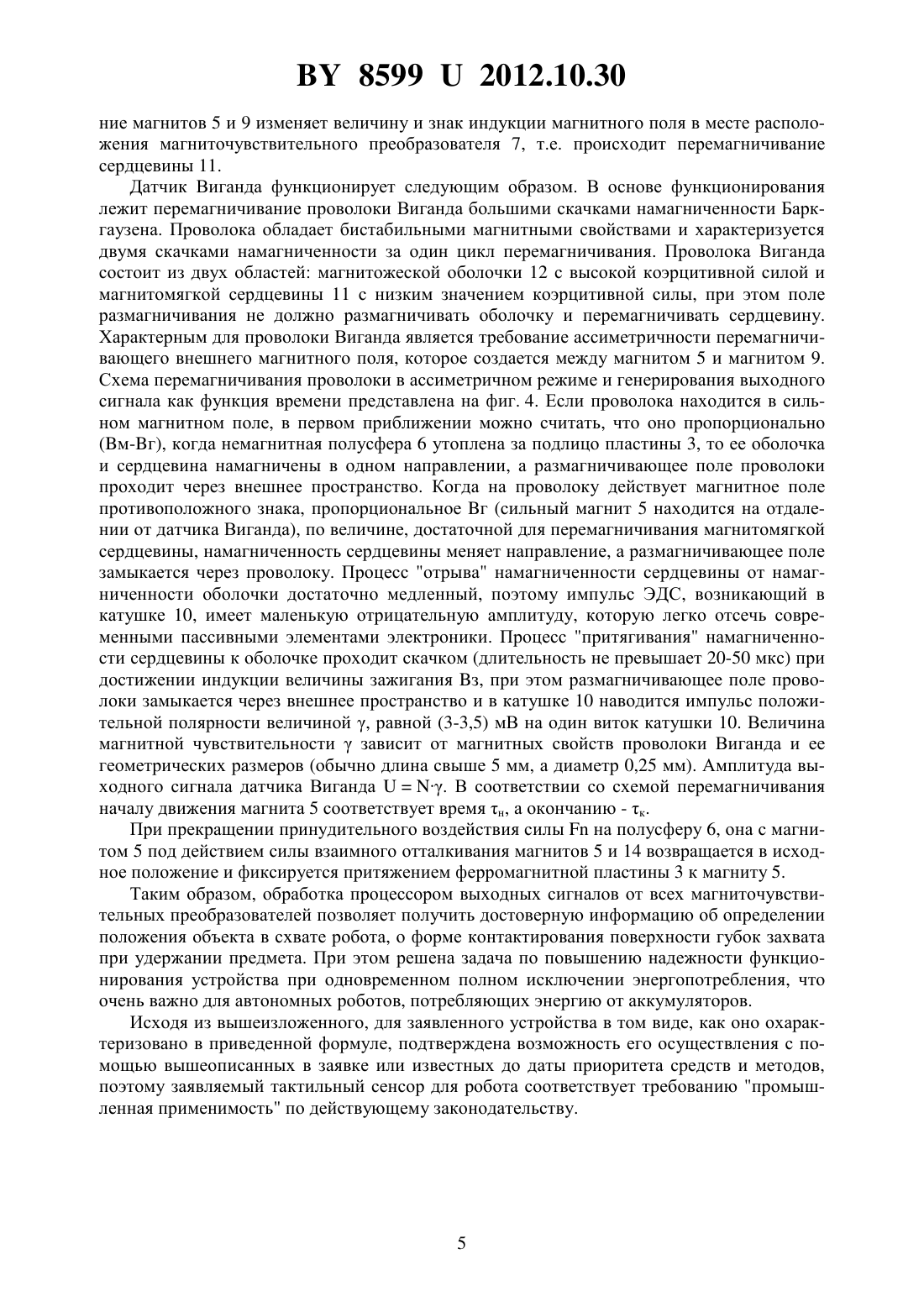
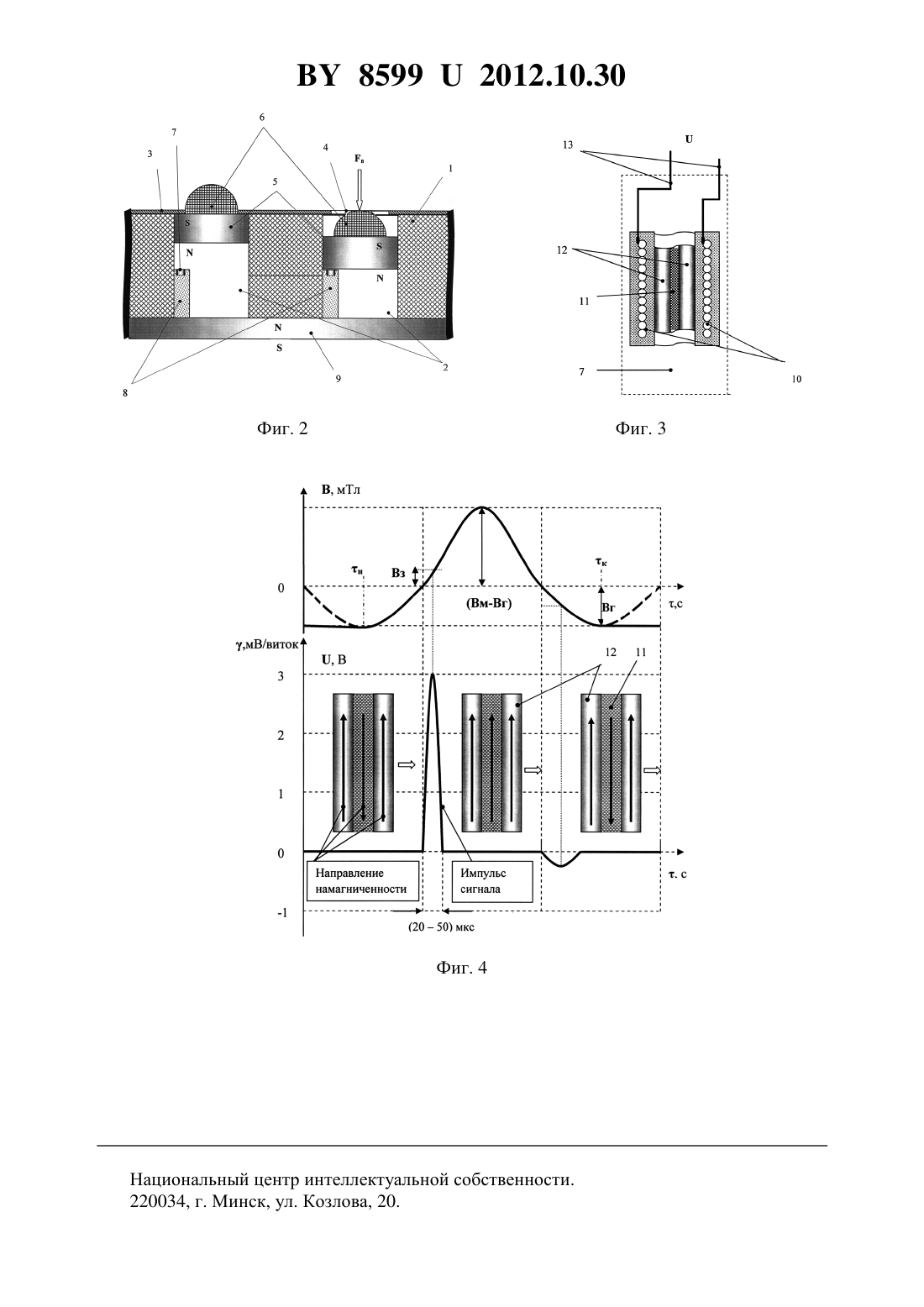
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ТАКТИЛЬНЫЙ СЕНСОР ДЛЯ РОБОТА(71) Заявитель Белорусский государственный университет(72) Авторы Анищик Виктор Михайлович Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) Тактильный сенсор для робота, содержащий диамагнитный каркас с отверстиями, в верхней части которого закреплена ферромагнитная пластина с отверстиями соосными отверстиям каркаса, в которых расположены штоки, выполненные в виде миниатюрных идентичных постоянных магнитов цилиндрической формы и немагнитных полусфер, выступающих над рабочей поверхностью пластины и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи,размещенные у боковых поверхностей отверстий каркаса в параллельных плоскостях,причем в каждом отверстии каркаса установлено по одному магниточувствительному преобразователю, при этом каркас расположен между упомянутой ферромагнитной пластиной и целостным плоским цилиндрическим магнитом, полюса которого ориентированы противоположно полюсам каждого из миниатюрных магнитов, отличающийся тем,что магниточувствительный преобразователь выполнен в виде датчика Виганда, содержащего миниатюрную катушку из медной проволоки и размещенную в ней ферромагнитную проволоку Виганда, состоящую из магнитомягкой сердцевины с небольшой коэрцитивной силой и магнитожесткой оболочки, а целостный плоский магнит характеризуется индукцией на поверхности в 2,5-4 раза меньшей, чем индукция на поверхности каждого из миниатюрных магнитов.(56) 1. А.с. СССР 1323379, МПК 25 19/02, 1987. 2. А.с. СССР 1781029, МПК 25 19/0025 19/02, 1992 (прототип). 3. Бараночников М.Л. Микромагнитоэлектроника. Т. 1. - М. ДМК Пресс, 2001. - 544 с. Заявляемая полезная модель относится к робототехнике, преимущественно для автономных роботов и может быть использована для получения информации об определении положения объекта в схвате робота и о форме контактирования поверхности губок захвата при удержании предмета. Известен тактильный датчик (сенсор) 1, выполненный в виде матрицы элементов,функционирующих на эффекте Холла. Он содержит каркас с магнитной системой, матрицу элементов Холла и расположенные на его рабочей поверхности стержни, имеющие возможность осевого перемещения относительно каркаса. Магнитная система выполнена в виде двух ферромагнитных пластин, установленных с зазором параллельно друг другу,двух постоянных магнитов, направленных одноименными полюсами в одну сторону и расположенных в зазоре между пластинами. Стержни выполнены из ферромагнитного материала, установлены в каркасе из неферромагнитного материала, в каркасе и одной из пластин сделаны соосные отверстия, причем стержни являются подпружиненными относительно каркаса. Регистрация сигналов производится матрицей элементов Холла, расположенных на второй пластине в зазоре между этой пластиной и каркасом, при перемещении стержней в магнитной системе. Это устройство имеет недостаточную надежность определения процесса контактирования с поверхностью предмета произвольной формы, например, в условиях проскальзывания. Так, из-за того, что выступающие на поверхность стержни имеют цилиндрическую форму, в случае контактирования с предметом сложной формы возможно не только утапливание стержней, но и их изгиб при тангенциальных относительно пластины сенсора усилиях. Последнее имеет место при проскальзывании предмета. Кроме того, предмет острыми частями, например углом, может цепляться за выступающие стержни. Силовые воздействия на стержни могут приводить к заклиниванию последних, изменению рабочих характеристик тактильного сенсора. Вторым главным недостатком устройства является достаточно высокое энергопотребление, связанное с тем, что каждый элемент Холла должен запитываться током величиной(10-30) мА, что при большом количестве элементов Холла в матрице приводит к значительному энергопотреблению. Элементы Холла должны подключаться к источнику ЭДС только параллельно (но не последовательно), чтобы исключить возможность одновременного отказа функционирования всей матрицы элементов Холла при поломке одного из них. Наиболее близким по технической реализации к предлагаемому решению является тактильный сенсор, приведенный в 2 (прототип). Устройство содержит каркас с магнитной системой, расположенные на его рабочей поверхности штоки, имеющие возможность осевого перемещения относительно каркаса, и магниточувствительные преобразователи,выполненные из тонких пленок магнитомягкого материала, например пермаллоя, функционирующие на планарном эффекте Холла. Магниточувтвительные преобразователи расположены в плоскостях, проходящих через оси симметрии плоского магнита и каждого из штоков. Магнитная система выполнена в виде плоского магнита и ферромагнитной пластины, расположенных параллельно друг другу с зазором, при этом штоки выполнены в виде постоянных миниатюрных магнитов, обращенных одноименными полюсами к аналогичному полюсу плоского магнита. На штоках закреплены неферромагнитные части в виде полусфер, выступающих над пластиной, в которой выполнены отверстия, соосные с отверстиями каркаса и в которых размещены штоки. 2 85992012.10.30 Устройство работает следующим образом при контакте штока (немагнитной полусферы) с поверхностью предмета под действием силы, составляющая которой параллельна оси штока, происходит отрывание миниатюрного магнита от ферромагнитной пластины и движение в отверстии немагнитного каркаса. По ЭДС электрических сигналов от магниточувствительных преобразователей судят о величинах перемещений штоков в каркасе, следовательно, о контактировании поверхности губок захвата при удержании предмета и силе воздействия схвата на участки предмета. После прекращения силового воздействия на предмет штоки возвращаются в исходное состояние благодаря силам отталкивания миниатюрных магнитов от плоского магнита и фиксируются притяжением ферромагнитной пластины к миниатюрным магнитам, что придает устойчивость сенсору при ускорении, случайных толчках и тряске. Тем не менее описанное устройство (прототип) обладает повышенными габаритами и низкой надежностью в связи с недостаточно высоким уровнем выходных сигналов, величины которых составляют менее десяти милливольт для среднестатистических элементов,функционирующих на планарном эффекте Холла. Поэтому требуется использование усилителей сигналов, а также естественно источников питающих напряжений. Вторым недостатком прототипа 2 является, как и в 1, повышенное энергопотребление вследствие тех же причин, которые были приведены выше. Последнее особенно необходимо в случае энергопотребления от аккумуляторов при использовании устройств в автономных роботах. Задачей, решаемой в настоящей полезной модели, является повышение надежности при одновременном исключении энергопотребления устройства. Тактильный сенсор для робота содержит диамагнитный каркас с отверстиями, в верхней части которого закреплена ферромагнитная пластина с отверстиями, соосными отверстиям каркаса, в которых расположенные штоки, выполненные в виде миниатюрных идентичных постоянных магнитов цилиндрической формы и немагнитных полусфер, выступающих над рабочей поверхностью пластины и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи размещены у боковых поверхностей отверстий каркаса в параллельных плоскостях, причем в каждом отверстии каркаса установлено по одному магниточуствительному преобразователю, при этом каркас расположен между упомянутой ферромагнитной пластиной и целостным плоским цилиндрическим магнитом, полюса которого ориентированы противоположно полюсам каждого из миниатюрных магнитов. Он отличается тем, что магниточувствительный преобразователь выполнен в виде датчика Виганда 3, содержащего миниатюрную катушку из медной проволоки и размещенную в ней ферромагнитную проволоку Виганда, состоящую из магнитомягкой сердцевины с небольшой коэрцитивной силой и магнитожесткой оболочки, а целостный плоский магнит характеризуется индукцией на поверхности в 2,5-4 раза меньшей, чем индукция на поверхности каждого из миниатюрных магнитов. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению надежности при одновременном исключении энергопотребления. Решение поставленной задачи достигается тем, что в предложенном устройстве магниточувтвительный преобразователь выполнен в виде датчика Виганда 3, и имеет значительно более высокий уровень выходного сигнала по сравнению с прототипом (вольты без усиления), и не требует энергопотребления (сам генерирует выходной сигнал), что позволяет изготавливать устройство более надежным и энергонезависимым. Проведенный анализ уровня техники позволил установить, что заявителем не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемого изобретения, а определение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому 3 85992012.10.30 результату отличительных признаков в заявленном устройстве, изложенных в формуле изобретения. Таким образом, комплексный анализ изложенных отличительных признаков конструкции тактильного сенсора для робота показывает, что они являются существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых в совокупности обеспечивают решение поставленной комплексной задачи в заявляемом устройстве, а само устройство содержит новые элементы, следовательно,можно сделать вывод о соответствии заявляемой полезной модели условию патентоспособности новизна. Заявляемая полезная модель поясняется фиг. 1- 4. На фиг. 1 изображен внешний вид тактильного сенсора для робота. На фиг. 2 - сечение устройства по радиусу. На фиг. 3 приведена конструкция датчика Виганда. На фиг. 4 представлена схема перемагничивания проволоки Виганда, как функция временипри изменении индукции внешнего магнитного поля . Началу движения штока соответствует время н, а окончанию - к.- выходной сигнал датчика, а- его магнитная чувствительность (выходной сигнал на один виток катушки). Число витков катушки 1000. Устройство содержит диамагнитный каркас 1 с отверстиями 2, в верхней части которого закреплена ферромагнитная пластина 3 с отверстиями 4, соосными отверстиям 2 каркаса 1, в которых расположены штоки, выполненные в виде миниатюрных идентичных постоянных магнитов цилиндрической формы 5 и немагнитных полусфер 6, выступающих над рабочей поверхностью пластины 3 и имеющих возможность осевого перемещения относительно каркаса 1, идентичные магниточувствительные преобразователи 7, размещенные у боковых поверхностей отверстий каркаса в параллельных плоскостях на подставках 8, причем в каждом отверстии 2 каркаса установлено по одному магниточуствительному преобразователю, при этом каркас расположен между ферромагнитной пластиной 3 и целостным плоским цилиндрическим магнитом 9, полюса которого ориентированы противоположно полюсам каждого из миниатюрных магнитов 5. Целостный плоский магнит 9 характеризуется индукцией на поверхности г в 2,5-4 раза меньшей, чем индукция м на поверхности каждого из миниатюрных магнитов 5. Это может достигаться изготовлением магнитов из разных материалов, например магнита 9 из сплава , магнитов 5 из 5 и подбором их толщин. Последнее необходимо для правильного функционирования магниточувствительного преобразователя 7, работа которого будет рассмотрена далее. Магниточувствительный преобразователь 7 выполнен в виде датчика Виганда. Датчик Виганда содержит миниатюрную катушку 10 из медной проволоки диаметром 0,05-0,1 мм(число витковобычно в диапазоне 1000-3000) и размещенную в ней ферромагнитную проволоку Виганда, состоящую из магнитомягкой сердцевины 11 с небольшой коэрцитивной силой и магнитожесткой оболочки 12. В качестве материалов магнитожесткой оболочки обычно используют сплав 523810. Магнитомягкая сердцевина изготавливается обычно из сплавов 7228, 5848, 70426. Выводы миниатюрной катушки 10, в которой генерируется выходной электрический сигнал амплитудой , обозначены 13. Устройство работает следующим образом. В исходном состоянии немагнитные полусферы 6 штоков устройства находятся над рабочей поверхностью ферромагнитной пластины 3 и удерживаются в исходном состоянии за счет сил магнитного притяжения между пластиной 3 и магнитом 5, а также благодаря магнитному отталкиванию магнита 5 от магнита 9. При контакте полусферы 6 с поверхностью предмета под действием силы, составляющая которой параллельна оси штока , происходит отрывание миниатюрного магнита 5 от ферромагнитной пластины 3 и движение в отверстии немагнитного каркаса 1. Сближе 4 85992012.10.30 ние магнитов 5 и 9 изменяет величину и знак индукции магнитного поля в месте расположения магниточувствительного преобразователя 7, т.е. происходит перемагничивание сердцевины 11. Датчик Виганда функционирует следующим образом. В основе функционирования лежит перемагничивание проволоки Виганда большими скачками намагниченности Баркгаузена. Проволока обладает бистабильными магнитными свойствами и характеризуется двумя скачками намагниченности за один цикл перемагничивания. Проволока Виганда состоит из двух областей магнитожеской оболочки 12 с высокой коэрцитивной силой и магнитомягкой сердцевины 11 с низким значением коэрцитивной силы, при этом поле размагничивания не должно размагничивать оболочку и перемагничивать сердцевину. Характерным для проволоки Виганда является требование ассиметричности перемагничивающего внешнего магнитного поля, которое создается между магнитом 5 и магнитом 9. Схема перемагничивания проволоки в ассиметричном режиме и генерирования выходного сигнала как функция времени представлена на фиг. 4. Если проволока находится в сильном магнитном поле, в первом приближении можно считать, что оно пропорционально(м-г), когда немагнитная полусфера 6 утоплена за подлицо пластины 3, то ее оболочка и сердцевина намагничены в одном направлении, а размагничивающее поле проволоки проходит через внешнее пространство. Когда на проволоку действует магнитное поле противоположного знака, пропорциональное г (сильный магнит 5 находится на отдалении от датчика Виганда), по величине, достаточной для перемагничивания магнитомягкой сердцевины, намагниченность сердцевины меняет направление, а размагничивающее поле замыкается через проволоку. Процесс отрыва намагниченности сердцевины от намагниченности оболочки достаточно медленный, поэтому импульс ЭДС, возникающий в катушке 10, имеет маленькую отрицательную амплитуду, которую легко отсечь современными пассивными элементами электроники. Процесс притягивания намагниченности сердцевины к оболочке проходит скачком (длительность не превышает 20-50 мкс) при достижении индукции величины зажигания з, при этом размагничивающее поле проволоки замыкается через внешнее пространство и в катушке 10 наводится импульс положительной полярности величиной , равной (3-3,5) мВ на один виток катушки 10. Величина магнитной чувствительностизависит от магнитных свойств проволоки Виганда и ее геометрических размеров (обычно длина свыше 5 мм, а диаметр 0,25 мм). Амплитуда выходного сигнала датчика Виганда. В соответствии со схемой перемагничивания началу движения магнита 5 соответствует время н, а окончанию - к. При прекращении принудительного воздействия силына полусферу 6, она с магнитом 5 под действием силы взаимного отталкивания магнитов 5 и 14 возвращается в исходное положение и фиксируется притяжением ферромагнитной пластины 3 к магниту 5. Таким образом, обработка процессором выходных сигналов от всех магниточувствительных преобразователей позволяет получить достоверную информацию об определении положения объекта в схвате робота, о форме контактирования поверхности губок захвата при удержании предмета. При этом решена задача по повышению надежности функционирования устройства при одновременном полном исключении энергопотребления, что очень важно для автономных роботов, потребляющих энергию от аккумуляторов. Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемый тактильный сенсор для робота соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: H01L 41/08, B25J 19/00, B25J 19/02
Метки: сенсор, робота, тактильный
Код ссылки
<a href="https://by.patents.su/6-u8599-taktilnyjj-sensor-dlya-robota.html" rel="bookmark" title="База патентов Беларуси">Тактильный сенсор для робота</a>
Сенсор поверхности для сканирующего ближнеполевого оптического микроскопа
Номер патента: U 7345
Опубликовано: 30.06.2011
Авторы: Смирнов Андрей Геннадьевич, Рыжевич Анатолий Анатольевич, Ясинский Валерий Маркович
МПК: G01L 1/16
Метки: сканирующего, оптического, сенсор, поверхности, микроскопа, ближнеполевого
Текст:
...сенсор поверхности для сканирующего ближнеполевого оптического микроскопа включает следующие элементы пьезоэлектрический камертон, зонд, выполненный из оптоволокна с наноразмерным острием на конце, покрытым тонким слоем алюминия, и жестко прикрепленный к кожуху камертона вдоль оси камертона в плоскости зубцов камертона, жесткая перемычка, соединяющая зонд и ближайший к нему зубец камертона для передачи колебаний от камертона к колеблющейся...
Устройство для испытаний лафетных стволов пожарного робота
Номер патента: U 8309
Опубликовано: 30.06.2012
Авторы: Потеха Алексей Валентинович, Потеха Валентин Леонидович, Леванович Андрей Викторович
МПК: G01L 19/10
Метки: устройство, робота, стволов, пожарного, лафетных, испытаний
Текст:
...определяющим не только условия труда пожарного, но и саму возможность качественно выполнить им поставленную боевую задачу. Существенным недостатком известного технического устройства для испытаний лафетных стволов является невозможность оценки силового воздействия струи огнетушащего вещества непосредственно на элементы инфраструктуры объекта, полностью или частично охваченного пожаром. При этом можно выделить два аспекта силовое...
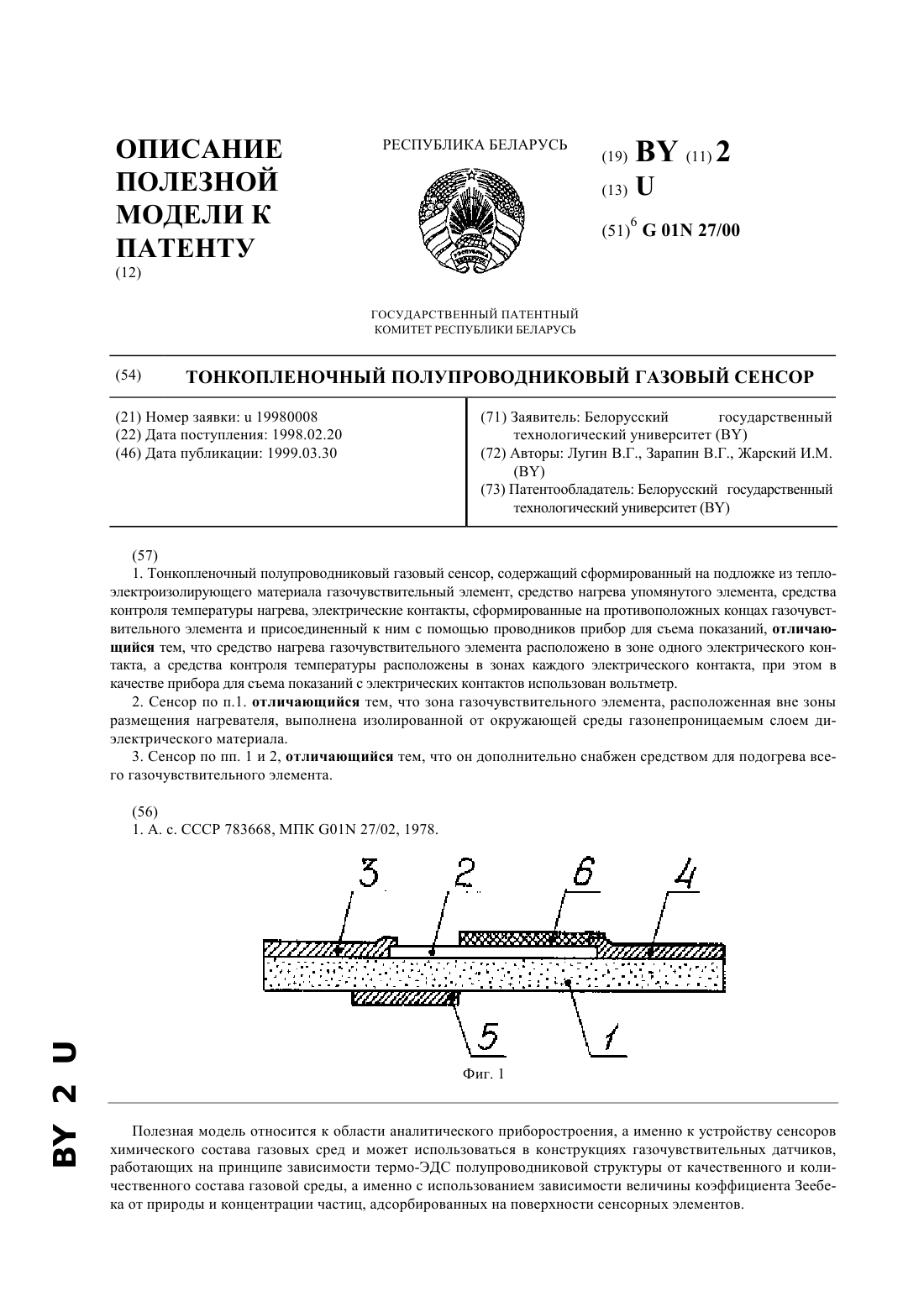
Тонкопленочный полупроводниковый газовый сенсор
Номер патента: U 2
Опубликовано: 30.03.1999
Авторы: Зарапин Виталий Георгиевич, Жарский Иван Михайлович, Лугин Валерий Геннадьевич
МПК: G01N 27/00
Метки: тонкопленочный, полупроводниковый, сенсор, газовый
Текст:
...дополнительно снабжен средством подогрева всего газочувствительного элемента для стабилизации температурных условий при необходимости повышения температуры газочувствительного элемента. Реализация предложенной полезной модели позволяет простыми, доступными и надежными средствами без усложнения отработанной тонкопленочной технологии повысить удобство измерений, снизить дрейф показаний, релаксацию, неконтролируемый перенос вещества, что...
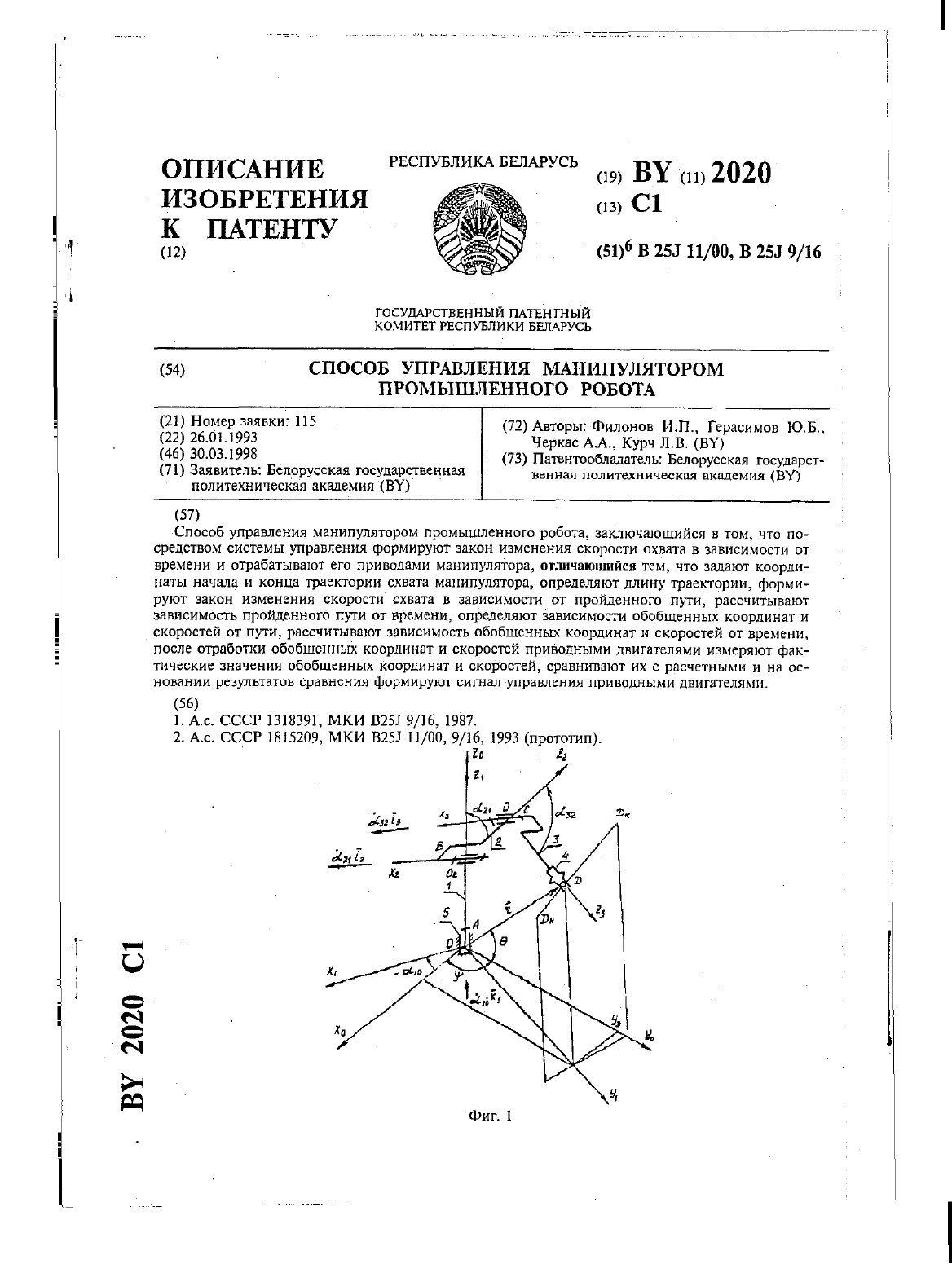
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Герасимов Юрий Борисович, Курч Леонид Витальевич, Черкас Александр Адамович, Филонов Игорь Павлович
МПК: B25J 9/16, B25J 11/00
Метки: способ, промышленного, управления, манипулятором, робота
Текст:
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: манипулятором, способ, промышленного, управления, робота
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Предыдущий патент: Устройство для очистки и обеззараживания воздуха в помещениях птицеводческих предприятий
Следующий патент: Копровая установка
Случайный патент: Брызгальная градирня