Курч Леонид Витальевич
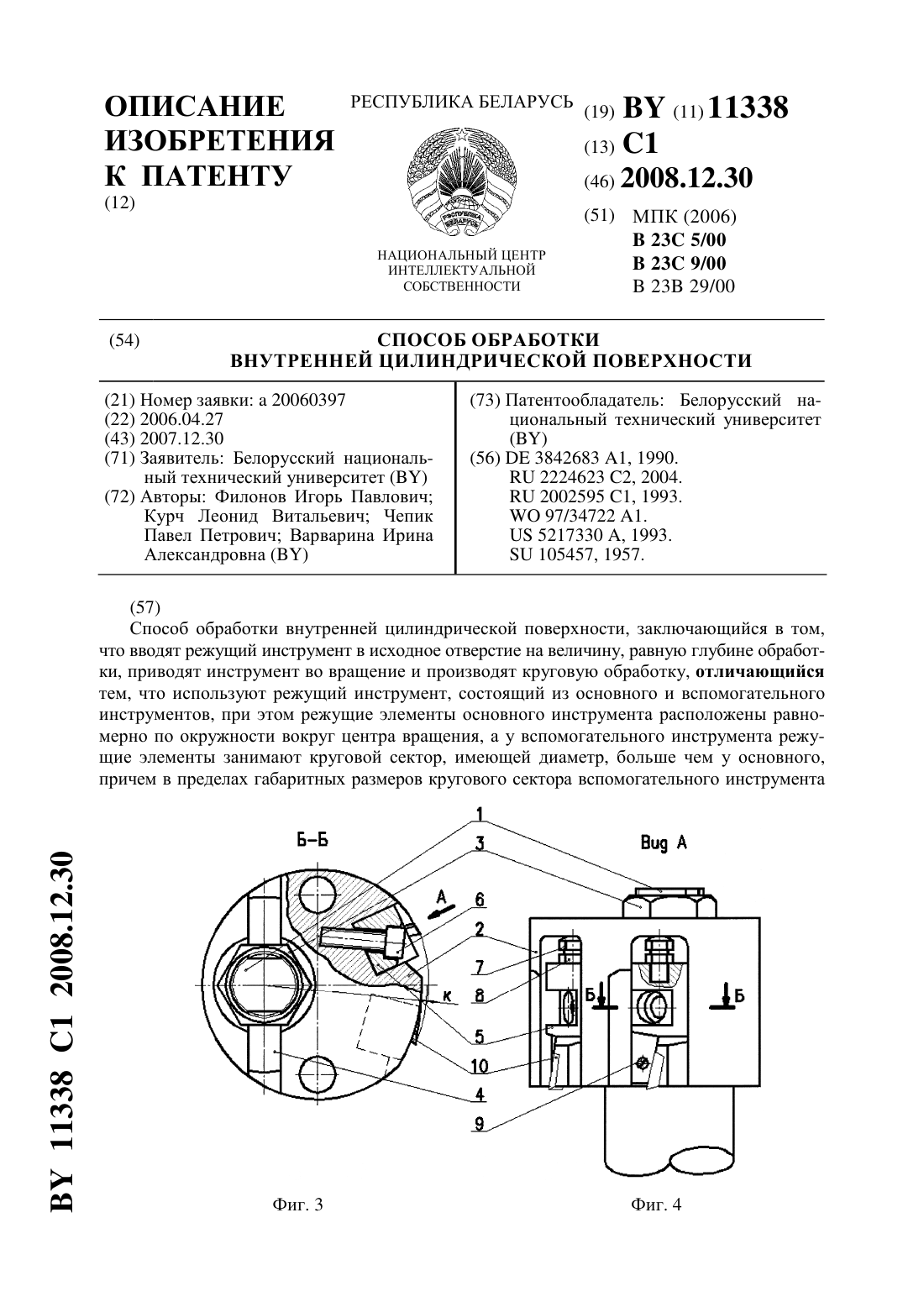
Способ обработки внутренней цилиндрической поверхности
Номер патента: 11338
Опубликовано: 30.12.2008
Авторы: Филонов Игорь Павлович, Курч Леонид Витальевич, Чепик Павел Петрович, Варварина Ирина Александровна
МПК: B23C 5/00, B23B 29/00, B23C 9/00...
Метки: поверхности, цилиндрической, внутренней, обработки, способ
Текст:
...через отверстиев исходное отверстие заготовки с вращением или без него вводят основной инструмент, которым осуществляют предварительную обработку, по ее окончании основной инструмент выводят из отверстия и вводят без вращения дополнительный инструмент (фиг. 3, 4), ось вращения которого совпадает с осью , а режущие элементы 10 направлены к шпинделю станка при вращении инструмента производится круговая обработка рассматриваемых...
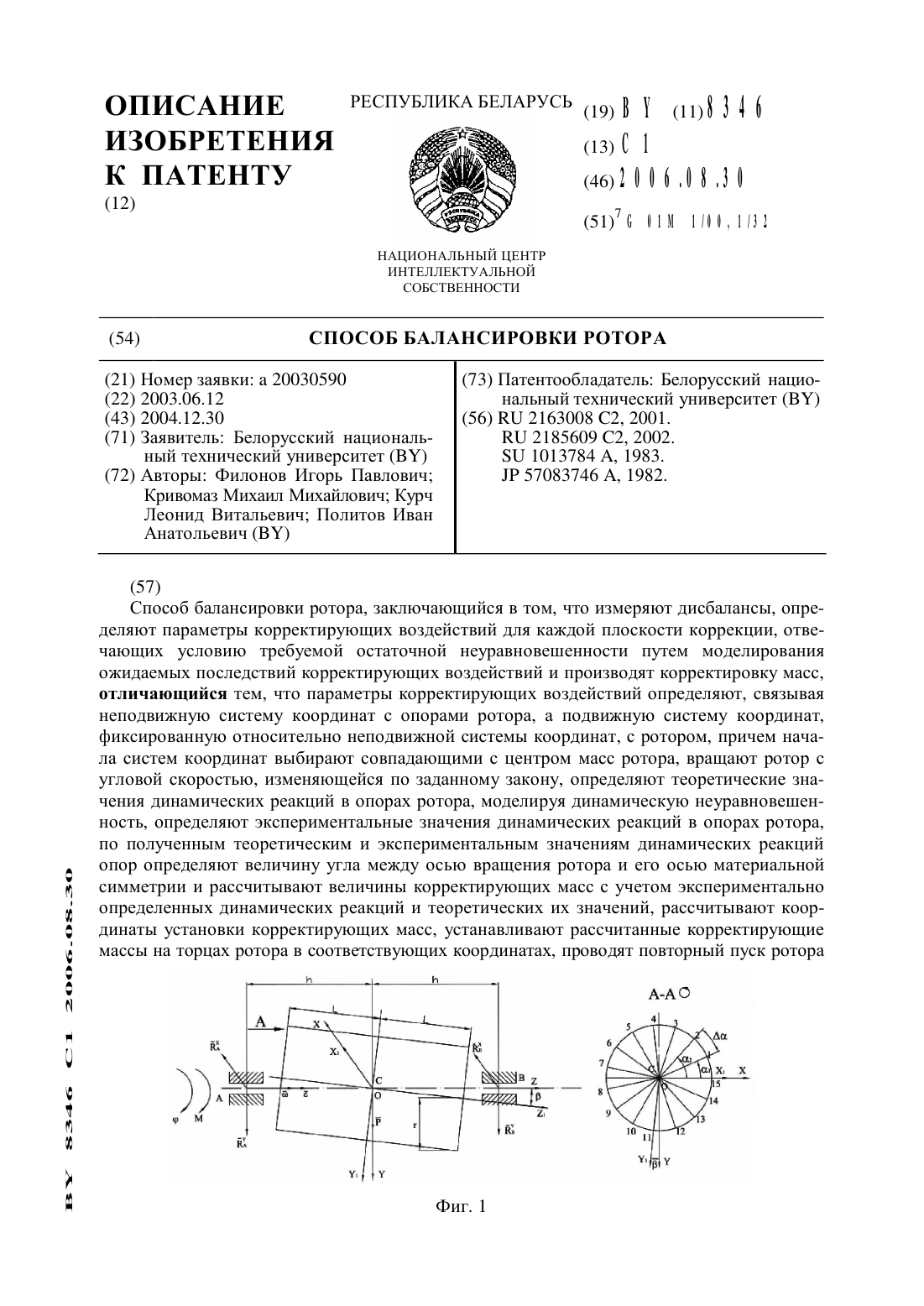
Способ балансировки ротора
Номер патента: 8346
Опубликовано: 30.08.2006
Авторы: Курч Леонид Витальевич, Филонов Игорь Павлович, Кривомаз Михаил Михайлович, Политов Иван Анатольевич
Метки: балансировки, ротора, способ
Текст:
...изменения угла (р поворота ротора от времени г при заданной кинематике ротора, на фиг. 3 - поясняется схема корректировки масс ротора путем добавления соответствующих корректирующих масс в соответствии с расчетной схемойПредлагаемый алгоритм динамической балансировки ротора следующий1. Выбирают две системы координат неподвижную ОХУ и подвижную О 1 Х 1 У 121,связанную с уравновещиваемым звеном (ротором) (фиг. 1). В данном случае оба...
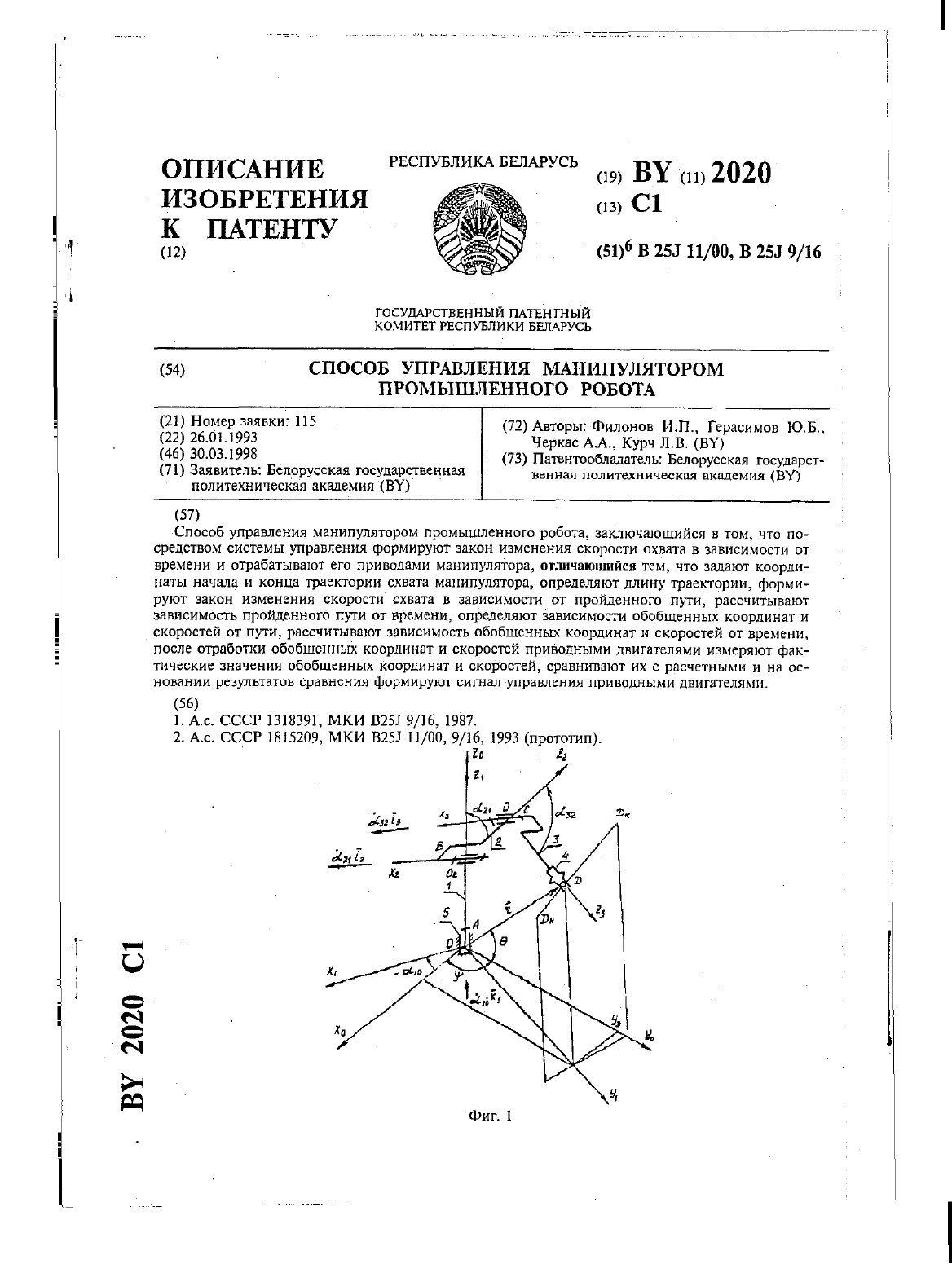
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Филонов Игорь Павлович, Герасимов Юрий Борисович, Черкас Александр Адамович, Курч Леонид Витальевич
МПК: B25J 9/16, B25J 11/00
Метки: манипулятором, способ, робота, управления, промышленного
Текст:
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...