Способ управления манипулятором промышленного робота
Номер патента: 4972
Опубликовано: 30.03.2003

Текст
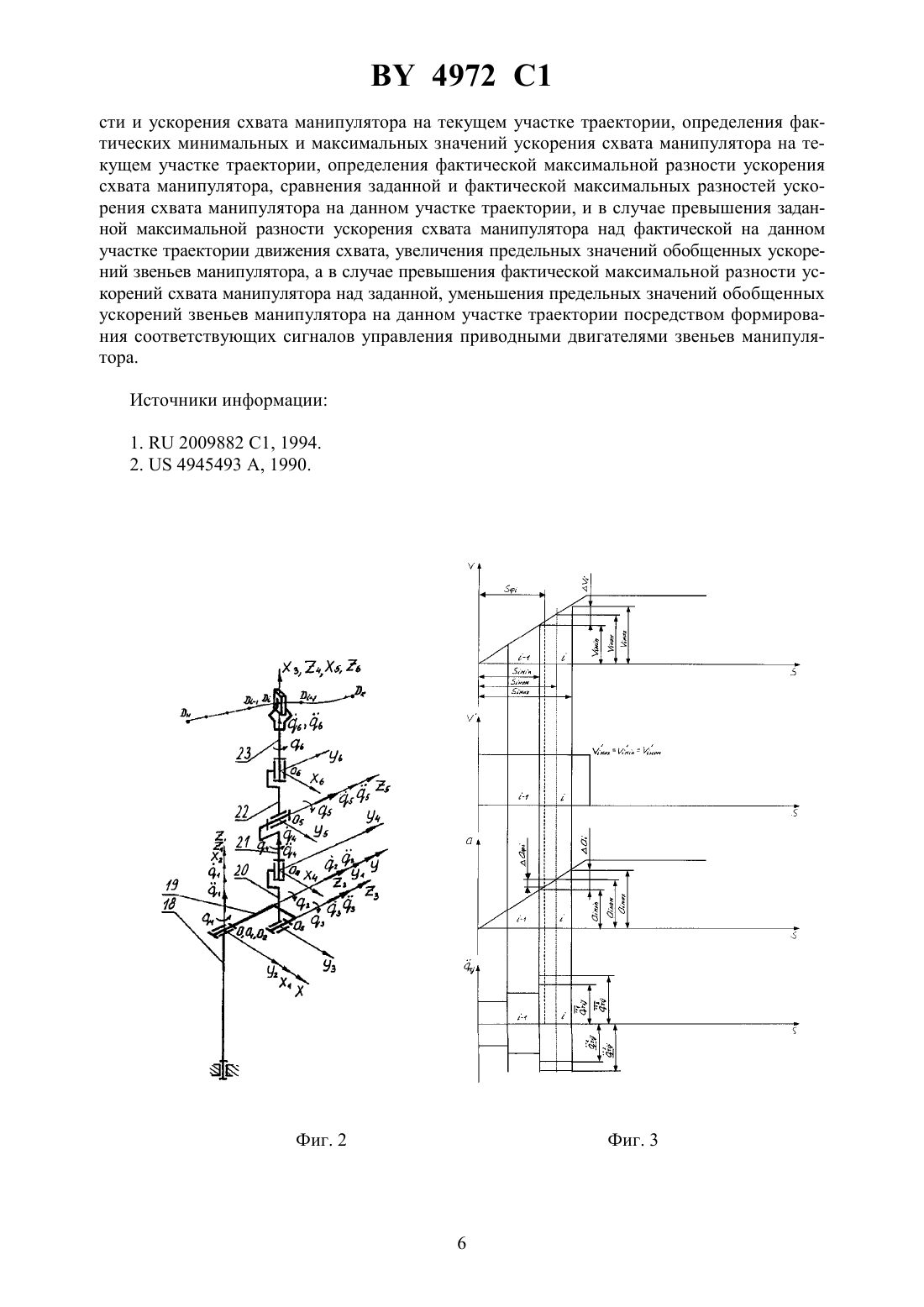
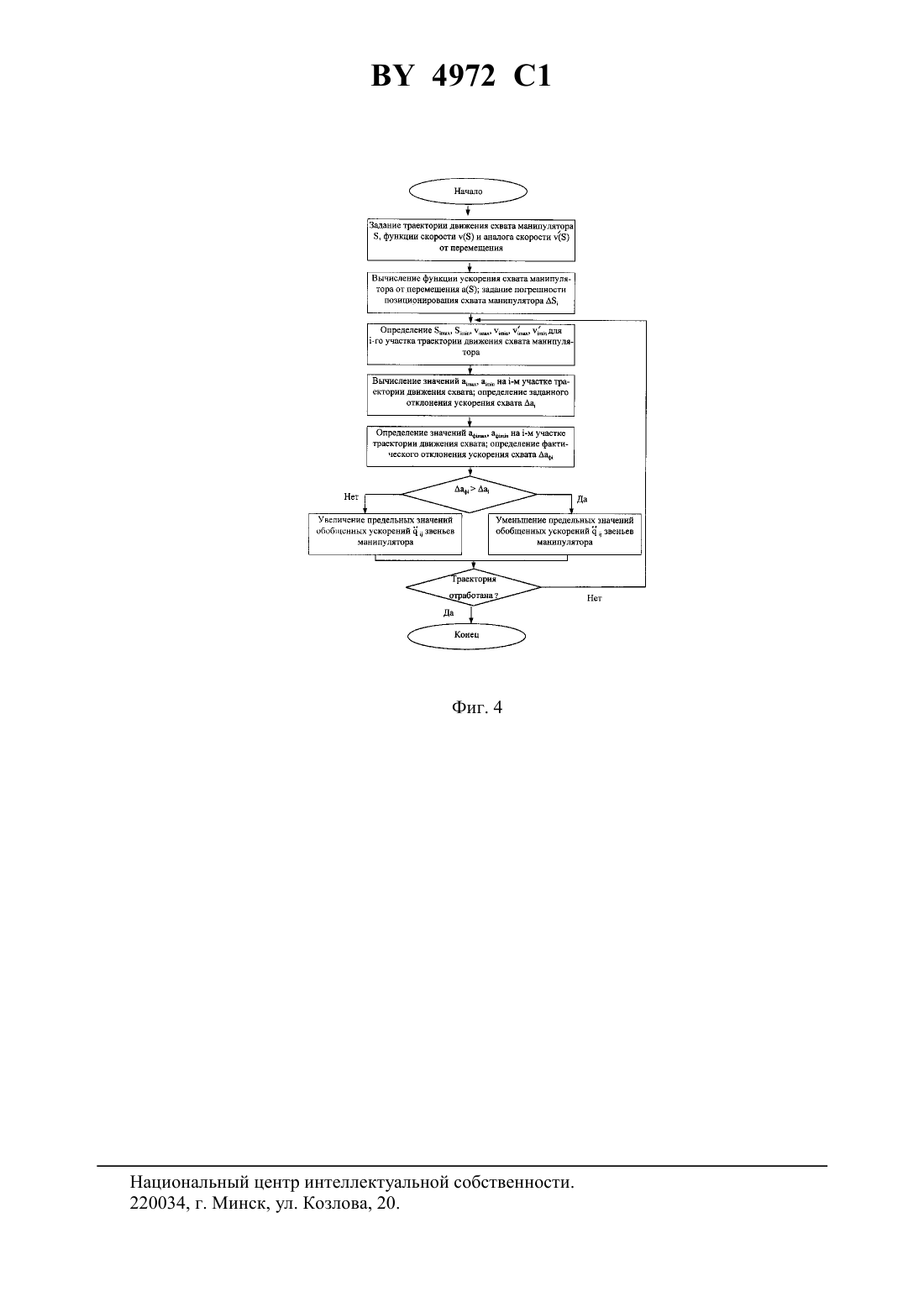
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(54) СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ ПРОМЫШЛЕННОГО(71) Заявитель Белорусский национальный технический университет(72) Авторы Филонов Игорь Павлович Вериго Евгений Борисович(73) Патентообладатель Белорусский национальный технический университет(57) Способ управления манипулятором промышленного робота, заключающийся в том,что измеряют отклонения между заданным и фактическим положением схвата манипулятора промышленного робота вдоль всей траектории движения схвата, определяют линейные и угловые перемещения схвата для перехода в заданное положение, преобразуют координаты схвата в обобщенные координаты звеньев манипулятора, формируют сигналы управления приводными двигателями звеньев манипулятора, отличающийся тем, что задают скорость перемещения схвата , как некоторую функцию его перемещенияпо, определяют аналог скоростии ускорениесхвата в соот ветствии с выражениями 4972 1 разбивают траекторию движения схвата на опорные точки, на каждом из участков траектории движения задают допустимую погрешность позиционирования схвата, максимальное и минимальное отклонения от заданных опорных точек, на текущем участке траектории движения вычисляют максимальное и минимальное заданные значения скорости, аналога скорости и ускорения схвата с последующим вычислением максимальных разностей их заданных значений, после преобразования координат схвата в обобщенные координаты звеньев манипулятора на текущем участке траектории движения вычисляют значения обобщенных скоростей и ускорений звеньев манипулятора и задают предельные значения обобщенных ускорений, при этом на текущем участке траектории движения определяют максимальное и минимальное фактические значения ускорения схвата и вычисляют максимальную разность его фактических значений, а сигналы управления приводными двигателями звеньев манипулятора формируют на основании сравнения максимальных разностей заданных и фактических значений ускорения схвата на текущем участке траектории движения, при этом, если максимальная разность заданных значений ускорения схвата превышает максимальную разность его фактических значений, увеличивают верхние предельные значения и уменьшают нижние предельные значения обобщенных ускорений звеньев манипулятора, а если максимальная разность фактических значений ускорения схвата превышает максимальную разность его заданных значений,уменьшают верхние предельные значения и увеличивают нижние предельные значения обобщенных ускорений звеньев манипулятора.(56)4945493 , 1990.2020 1, 1998.2009882 1, 1994.0375418 2, 1990.0235779 1, 1987.0323278 2, 1989.0223076 1, 1987.2079732 1, 1997.93033311 , 1996. Изобретение относится к области машиностроения и может найти применение в манипуляторах промышленных роботов, в частности для автоматизации технологических процессов, например, сварки или сборки. Известен способ определения положения схвата манипулятора 1, по которому определяют фактическое положение схвата манипулятора в системе координат робота, сравнивают его с заданным и вычисляют отклонение положения схвата манипулятора от заданного. Недостатком известного способа является то, что он не позволяет учитывать взаимосвязи кинематических характеристик манипулятора, обобщенных координат и ускорений манипулятора с заданным законом движения схвата манипулятора. Отсутствие возможности управления движением звеньев манипулятора в зависимости от кинематических характеристик движения схвата манипулятора не обеспечивает высокой стабильности погрешности позиционирования схвата манипулятора в заданной точке. Наиболее близким техническим решением является способ управления манипулятором промышленного робота 2, при котором измеряют отклонения между заданным и фактическим положением схвата, определяют линейные и угловые перемещения в системе координат робота для перехода схвата манипулятора в заданное положение, определяют фактические приращения обобщенных координат, обеспечивающие переход схвата в 2 4972 1 заданное положение и на основании полученных результатов формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата. Недостатком известного способа является то, что он не предусматривает первоначального задания закона изменения ускорения схвата манипулятора от пройденного пути, учета предельных значений ускорения схвата вдоль траектории схвата. В известном способе управления не осуществляется сравнение заданных и фактических значений ускорений схвата манипулятора вдоль заданной траектории и формирования сигналов управления приводными двигателями в зависимости от результата их сравнения. Это снижает стабильность погрешности позиционирования схвата манипулятора вдоль заданной траектории. Задача, решаемая изобретением, - повышение стабильности погрешности позиционирования схвата манипулятора и расширение технологических возможностей за счет учета фактических значений ускорения схвата при управлении манипулятором. Поставленная задача решается тем, что в способе управления манипулятором промышленного робота, заключающемся в том, что измеряют отклонения между заданным и фактическим положением схвата манипулятора промышленного робота вдоль всей траектории движения схвата, определяют линейные и угловые перемещения схвата для перехода в заданное положение, преобразуют координаты схвата в обобщенные координаты звеньев манипулятора, формируют сигналы управления приводными двигателями звеньев манипулятора, задают скорость перемещения схвата , как некоторую функцию его пере мещенияпо формуле, определяют аналог скоростии ускорение,разбивают траекторию движения схвата на опорные точки, на каждом из участков траектории движения задают допустимую погрешность позиционирования схвата, максимальное и минимальное отклонения от заданных опорных точек, на текущем участке траектории движения вычисляют максимальное и минимальное заданные значения скорости, аналога скорости и ускорения схвата с последующим вычислением максимальных разностей их заданных значений, после преобразования координат схвата в обобщенные координаты звеньев манипулятора на текущем участке траектории движения вычисляют значения обобщенных скоростей и ускорений звеньев манипулятора и задают предельные значения обобщенных ускорений, при этом на текущем участке траектории движения определяют максимальное и минимальное фактические значения ускорения схвата и вычисляют максимальную разность его фактических значений, а сигналы управления приводными двигателями звеньев манипулятора формируют на основании сравнения максимальных разностей заданных и фактических значений ускорения схвата на текущем участке траектории движения, при этом, если максимальная разность заданных значений ускорения схвата превышает максимальную разность его фактических значений, увеличивают верхние предельные значения и уменьшают нижние предельные значения обобщенных ускорений звеньев манипулятора, а если максимальная разность фактических значений ускорения схвата превышает максимальную разность его заданных значений,уменьшают верхние предельные значения и увеличивают нижние предельные значения обобщенных ускорений звеньев манипулятора. Сущность предлагаемого способа поясняется чертежами, где на фиг. 1 представлена блок-схема системы управления манипулятором фиг. 2 изображена схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль определения фактических значений ускорения схвата робота. Система управления состоит из блоков блок 5 (блок задания траектории схвата манипулятора ),блок 6 (блок задания зависимостей скорости и аналога скорости от перемещенияи(, блок 7 (блок задания допустимой погрешности позиционирования схвата ), блок 8 (блок преобразования координат робота в обобщенные координатызвеньев манипулятора), блок 9 (блок вычисления значений ускорения схвата манипулятораот перемещения), блок 10 (блок вычисления максимальных разностей скоростии аналога скорости, схвата манипулятора для заданного участка траектории), блок 11 (блок вы числения обобщенных скоростейзвеньев манипулятора), блок 12 (блок вычисления обобщенных ускоренийзвеньев манипулятора), блок 13 (блок определения заданной максимальной разности ускорений схвата манипулятора (, блок 14 (блок ограниче ния значений ускорений обобщенных координат звеньев манипулятораи) и блок 15 (блок сравнения максимальных разностейи ф значений заданных и фактических ускорений схвата манипулятора). Модуль определения фактических значений ускорения схвата робота включает в себя блоки блок 16 (блок вычисления значений ускорения схвата аф манипулятора по заданной динамической модели манипулятора динамическая модель включает в себя геометрические и инерционные параметры звеньев,жесткостные характеристики звеньев, диссипативные свойства и определяется для конкретной конструкции робота в зависимости от требований к точности, вычислительных ресурсов системы управления и других требований) и блок 17 (блок определения значений фактической максимальной разности ускорений аф схвата манипулятора). Индексиспользуется для обозначения -го участка траектории движения схвата, индексиспользуется для обозначения -г звена манипулятора промышленного робота. Принцип работы блок-схемы управления манипулятором промышленного робота состоит в следующем. В соответствии с заданными значениями начальных координат точки н и конечных координат точки к, представленных на фиг. 2, в систему управления на блоки 5, 6 и 7 поступают управляющие сигналы 1, 2,3 для задания соответственно сигнала перемещения схвата , скорости , аналога скоростисхвата манипулятора ипогрешности позиционирования схвата для -х участков траектории схвата. Сигналпоступает на блок 8, на выходе которого формируются сигналыобобщенных координат звеньев манипулятора в результате решения обратной задачи кинематики для заданной конструкции манипулятора. Сигналы ,ипоступают на блоки 9, 10 и 11. На выходе блока 9 формируется сигнал ускорения схвата манипуляторав соответствии с Сигналпоступает на вход блока 10, на выходе которого в соответствии с графиками на фиг. 3 формируются сигналы разности скоростии аналога скорости,где-- . Сигналы а,ипоступают на вход блока 11, на выходе которого фор мируются сигналы обобщенных скоростей звеньев манипулятора. Сигналы ,и поступают на вход блока 12, на выходе которого формируются сигналы обобщенных ускоренийзвеньев манипулятора. Сигналы ,ипоступают на контроллеры приводов звеньев манипулятора, причем сигналпредварительно поступает на блок 14,4 на котором задаются верхняяи нижняяграницы значений обобщенных ускорений звеньев манипулятора, поступающих на контроллеры приводов. Значенияиопре деляются на основе значения сигнала, поступающего с выхода блока 15. В блоке 15 происходит сравнение сигналовзаданной и аф фактической максимальных разностей ускорения схвата манипулятора. Сигнал аф формируется на выходе блока 17. Методика определения а в системе управления поясняется графиками на фиг. 3,где под ном, ном, ном и ном обозначены номинальные значения соответственно положения, скорости, аналога скорости и ускорения схвата манипулятора. Функции скорости, аналога скоростии ускорениясхвата манипулятора от перемещения определяются по формулам. По результатам сравнения в блоке 15 в случае, если аф больше , на выходе блока формируется сигнал об уменьшении верхнего значенияобобщенных ускорений на выходе блока формируется сигнал об увеличении значенияи уменьшении. Ра бота блока 15 поясняется последним графиком на фиг. 3. Когда аф большепри нимаются граничные значения 1 и 1 , в противном случае при аф меньшепринимаются значения 2 и 2 . Как видно из последнего графика на фиг. 3, значение верхней границы обобщенного ускорения -г звена манипулятора 2 больше, чем 1 , азначение нижней границы обобщенного ускорения -г звена манипулятора 2 меньшезначения 1 . Регулирование предельных значений обобщенных ускорений звеньев манипулятора в зависимости от значения отклонения ускорения схвата манипулятора от заданного повышает стабильность погрешности позиционирования схвата, обеспечивая при этом заданную точность позиционирования схвата манипулятора. Блок-схема алгоритма работы системы управления приведена на фиг. 4. Предложенный способ управления может быть реализован, например, манипулятором, схема которого представлена на фиг. 2. Манипулятор содержит подвижные звенья 18, 19, 20, 21, 22 и 23 со схватом. В качестве обобщенных координат манипулятора выбирают угловые перемещения звеньев . Системы координат звеньев манипулятора выбирают в соответствии с соглашениями ДенавитаХартенберга. Неподвижная система координатс центром в точке О, система координат первого звена 111 с центром в точке О 1 и т.д. до системы координат последнего шестого звена Х 666 с охватом в точке 6 показаны на фиг. 2. На фиг. 2 также приведены обобщенные координаты , обобщен 2 ные скоростии обобщенные ускорениязвеньев манипулятора. Таким образом, приведенный способ управления манипулятором промышленного робота позволяет решить поставленную задачу, заключающуюся в повышении стабильности погрешности позиционирования схвата за счет задания скорости перемещения схвата в функции от перемещения, определения аналога скорости и ускорение схвата в функции от перемещения, разделения траектории схвата на опорные точки, задания погрешности позиционирования схвата на каждом из участков траектории, максимального и минимального отклонения от заданных опорных точек, вычисления максимального и минимального значения скорости, аналога скорости, ускорения схвата манипулятора на текущем участке траектории, вычисления максимальных разностей скорости, погрешности аналога скоро 5 4972 1 сти и ускорения схвата манипулятора на текущем участке траектории, определения фактических минимальных и максимальных значений ускорения схвата манипулятора на текущем участке траектории, определения фактической максимальной разности ускорения схвата манипулятора, сравнения заданной и фактической максимальных разностей ускорения схвата манипулятора на данном участке траектории, и в случае превышения заданной максимальной разности ускорения схвата манипулятора над фактической на данном участке траектории движения схвата, увеличения предельных значений обобщенных ускорений звеньев манипулятора, а в случае превышения фактической максимальной разности ускорений схвата манипулятора над заданной, уменьшения предельных значений обобщенных ускорений звеньев манипулятора на данном участке траектории посредством формирования соответствующих сигналов управления приводными двигателями звеньев манипулятора. Источники информации 1.2009882 С 1, 1994. 2.4945493 А, 1990. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: B25J 9/16
Метки: промышленного, манипулятором, способ, управления, робота
Код ссылки
<a href="https://by.patents.su/7-4972-sposob-upravleniya-manipulyatorom-promyshlennogo-robota.html" rel="bookmark" title="База патентов Беларуси">Способ управления манипулятором промышленного робота</a>
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Черкас Александр Адамович, Курч Леонид Витальевич, Филонов Игорь Павлович, Герасимов Юрий Борисович
МПК: B25J 11/00, B25J 9/16
Метки: управления, промышленного, робота, манипулятором, способ
Текст:
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...
Способ управления зенитными комплексами
Номер патента: 3105
Опубликовано: 30.12.1999
Авторы: Шершнев Александр Владимирович, Будиловская Людмила Давыдовна, Чуйкин Анатолий Алексеевич, Карпенко Леонид Васильевич, Солодков Алексей Николаевич, Ольшанский Владимир Иванович, Войцеховский Владимир Юльевич
МПК: G05B 15/00
Метки: зенитными, комплексами, управления, способ
Текст:
...цели используются координаты и составляющие скорости, поступающие от СОЦ 18 одного из огневых комплексов, которые вместе с номером объединенной траектории записываются в выходной буфер запоминающего устройства блока отождествления 6. С огневых комплексов 2 на командный пункт 1 передаются данные о местоположении каждого ОК и сведения о боезапасе - данные о состоянии. Передача данных о состоянии с ОК 2 производится через аппаратуру 12...
Способ управления перемещением удлиненного элемента
Номер патента: 4300
Опубликовано: 30.03.2002
Авторы: Карстен КЛЕЙЕ, Вильфрид БОДЕН
МПК: F28G 1/16
Метки: перемещением, способ, удлиненного, управления, элемента
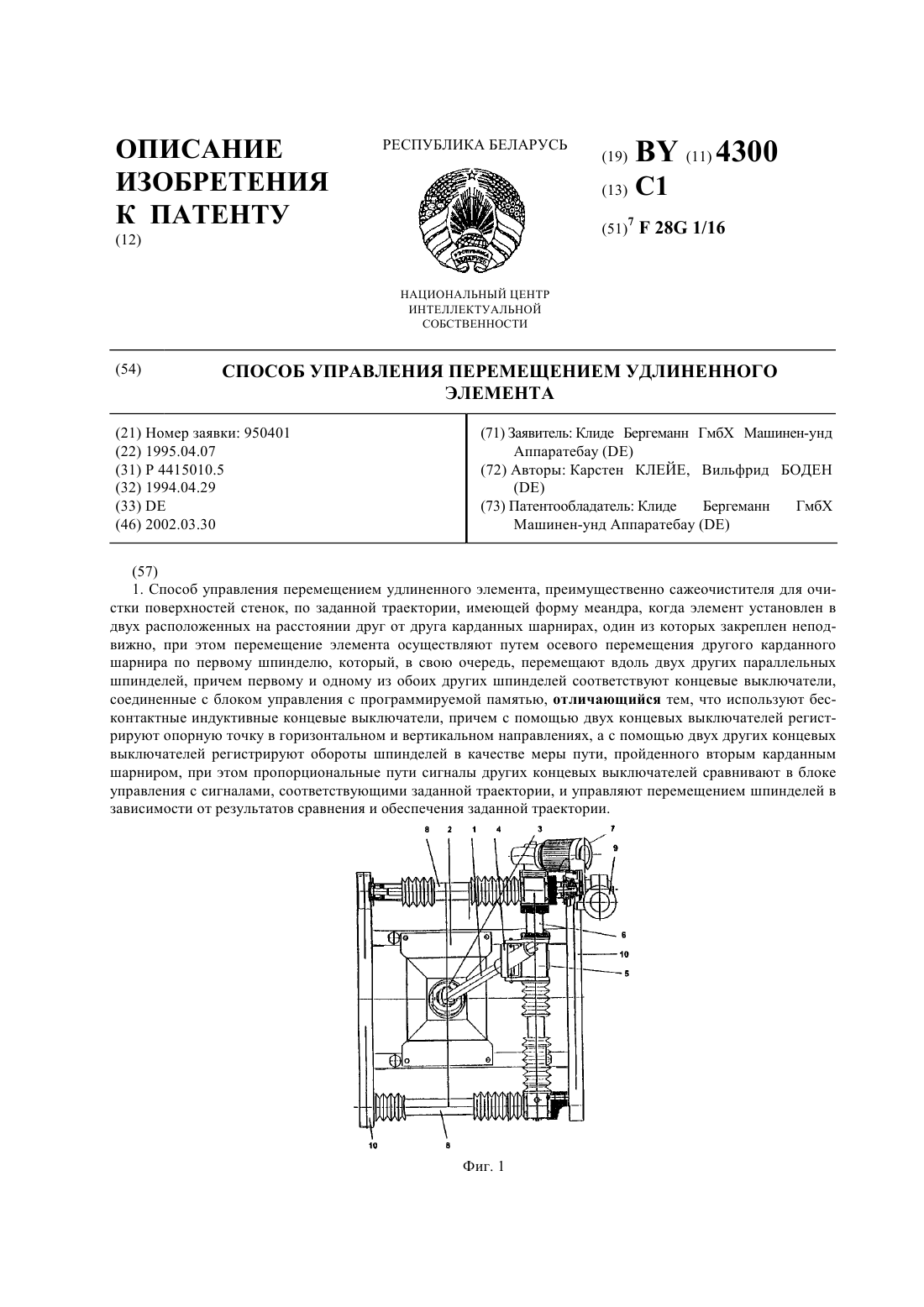
Текст:
...траектории, и управляют перемещением шпинделей в зависимости от результатов сравнения и обеспечения заданной траектории. Предпочтительно шпиндели приводят во вращение посредством тормозных двигателей трехфазного тока с регулируемой частотой вращения, при этом частоту вращения тормозных двигателей трехфазного тока следует изменять по сигналам с блока управления. За счет подобного регулирования частоты вращения можно варьировать...
Способ управления процессом обезвоживания суспензии
Номер патента: 105
Опубликовано: 30.09.1994
Авторы: Вишняк Б. А., Аношин А. И., Бурштейн С. М., Лемещенко В. С.
МПК: B01D 21/00, B01D 37/00
Метки: суспензии, обезвоживания, процессом, способ, управления
Текст:
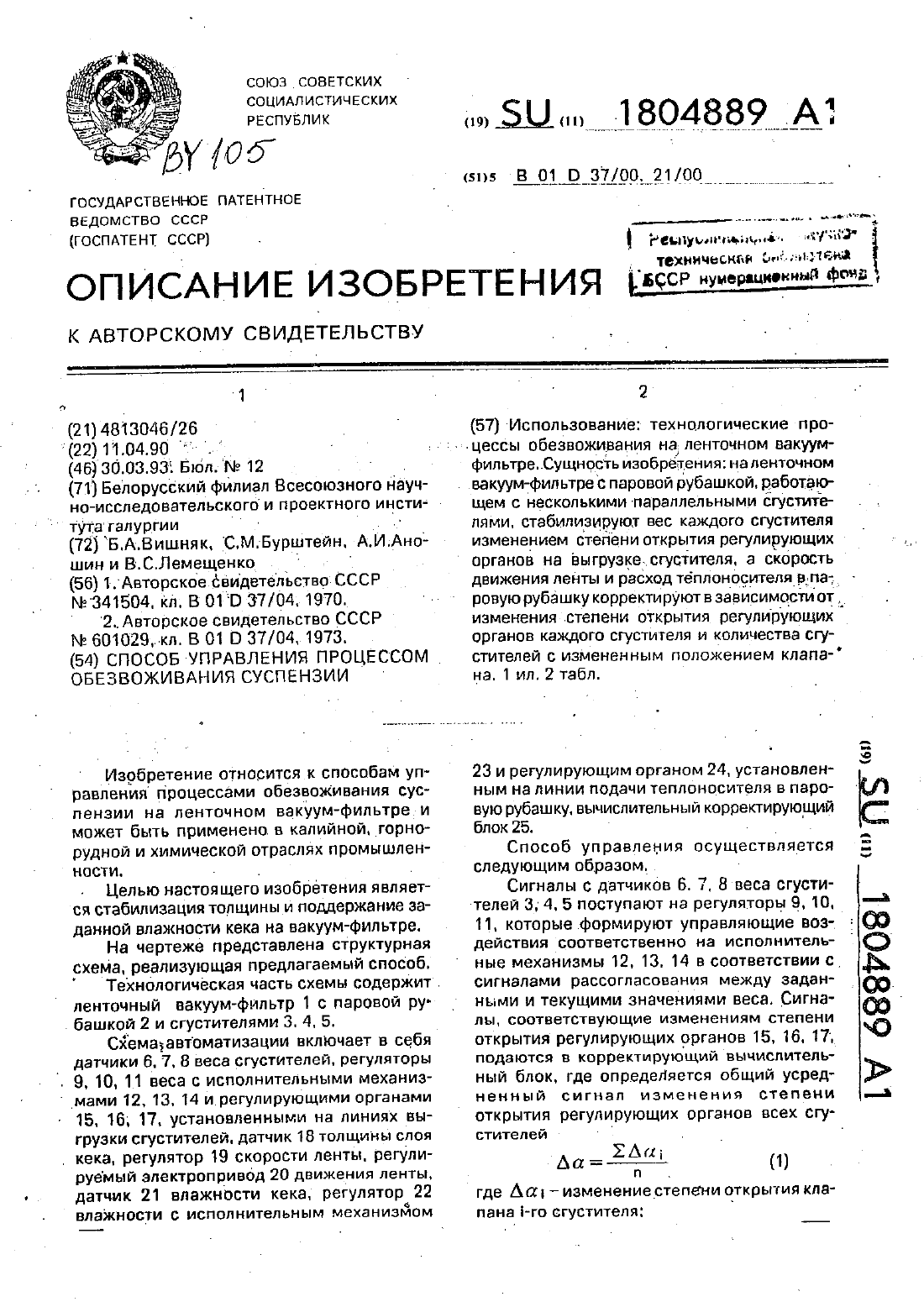
...к отрицательному скорость ленты снижается ниже этого значениям при увеличенииабсоПЮТНОГО значения отрицательного сигнала до максимальной величины скорость снижается ДО МИНИМЭПЬНО допустимого-значения. Подачу теплоносителя в паровую рубашку выполняют регулятором 22 в зависиМОСТИ 01 сигнала датчика 21 ВЛЗЖНОСТИ КЕКЭ и корректирующего сигнала скорости движения ленты вакуум-фильтра. Последний сигнал. поступающий на регулятор 22 с выхода...
Способ управления электромеханическим приводом машин
Номер патента: 2245
Опубликовано: 30.09.1998
Авторы: Быкевец С. П., Филонов И. П., Черкас А. А.
МПК: H02P 5/06
Метки: приводом, управления, способ, электромеханическим, машин
Текст:
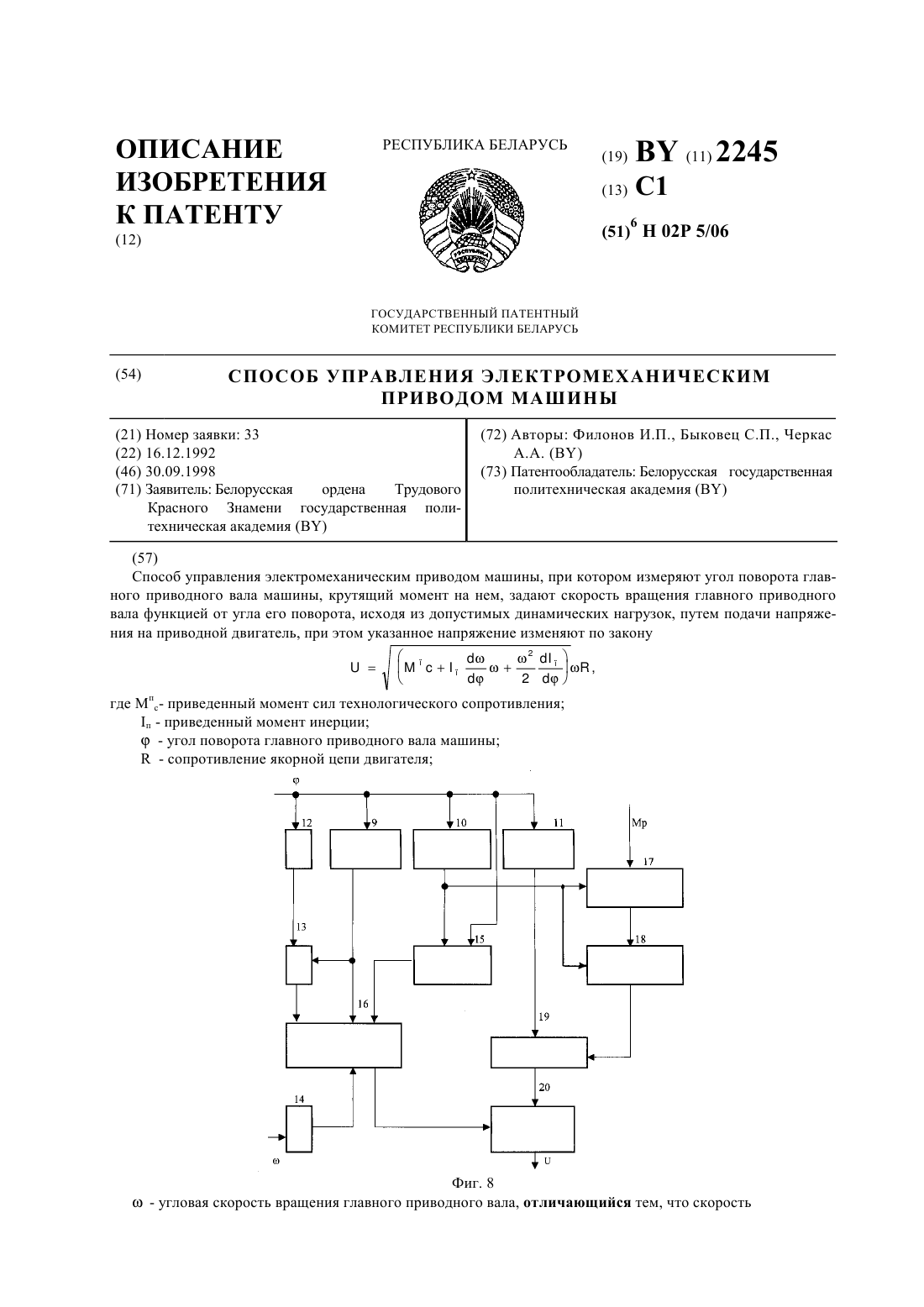
...скоростиот нуля до ср главного приводного вала машины. 2 и, определяющие суммарное значение привеНа фигуре 5 представлены зависимости,2 денного моментадвижущих сил в функции углаповорота главного приводного вала машины. На фи гуре 6 приведена зависимость, полученная как сумма составляющих, изображенных на фигуре 5. На фиг. 7 представлена структурная схема системы управления, включающая вычислитель 1, регулятор 2,двигатель 3, датчика 4...
Предыдущий патент: Протез среднего уха
Следующий патент: Способ получения резистивного слоя
Случайный патент: Роторный массообменный аппарат вентиляторного типа