Патенты с меткой «робота»
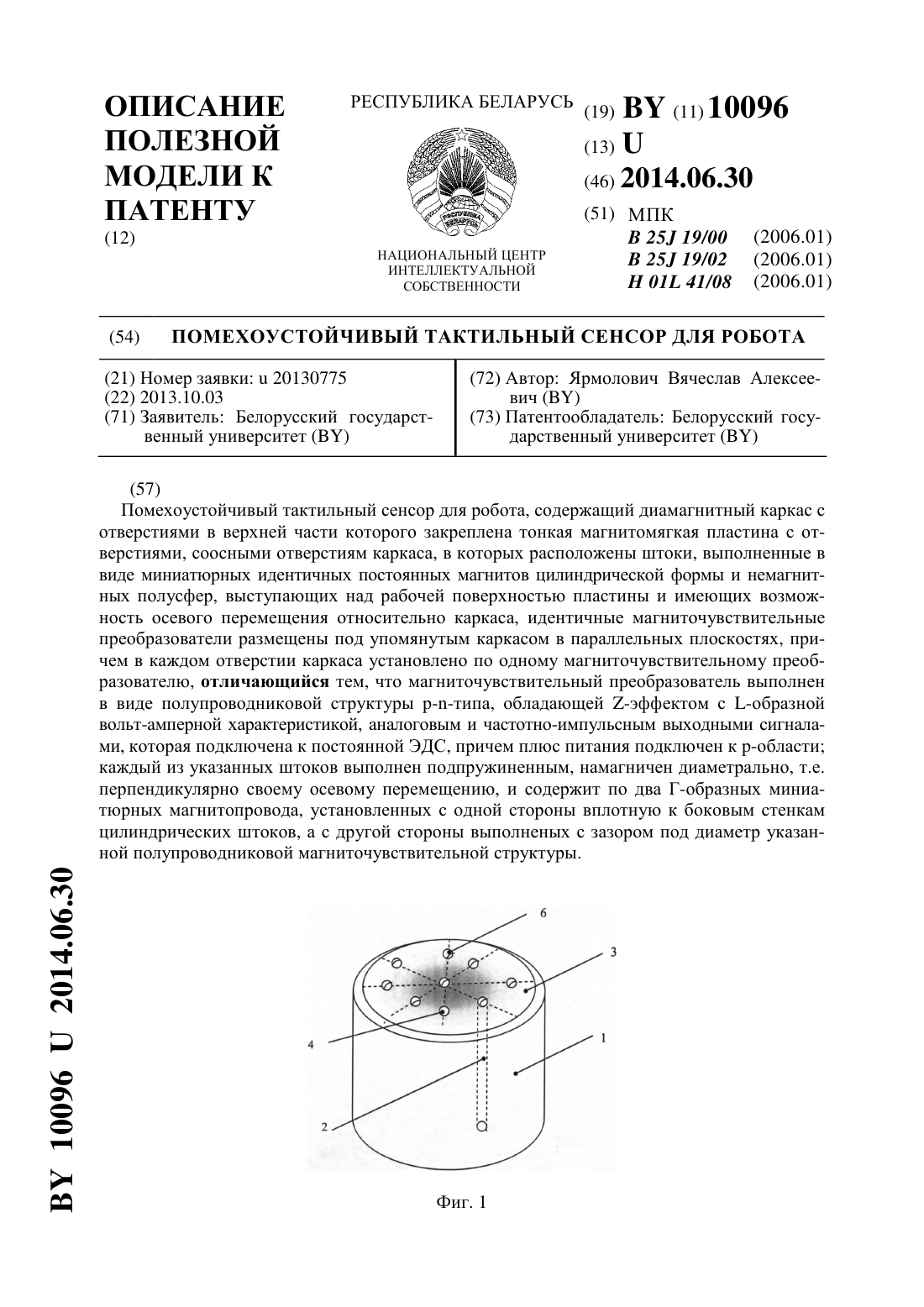
Помехоустойчивый тактильный сенсор для робота
Номер патента: U 10096
Опубликовано: 30.06.2014
Автор: Ярмолович Вячеслав Алексеевич
МПК: B25J 19/00, H01L 41/08, B25J 19/02...
Метки: сенсор, тактильный, помехоустойчивый, робота
Текст:
...цилиндрической формы и немагнитных полусфер, выступающих над рабочей поверхностью пластины и имеющих возможность осевого перемещения относительно каркаса, идентичные магниточувствительные преобразователи размещены под упомянутым каркасом в параллельных плоскостях,причем в каждом отверстии каркаса установлено по одному магниточувствительному преобразователю. Он отличается тем, что магниточувствительный преобразователь выполнен в виде...
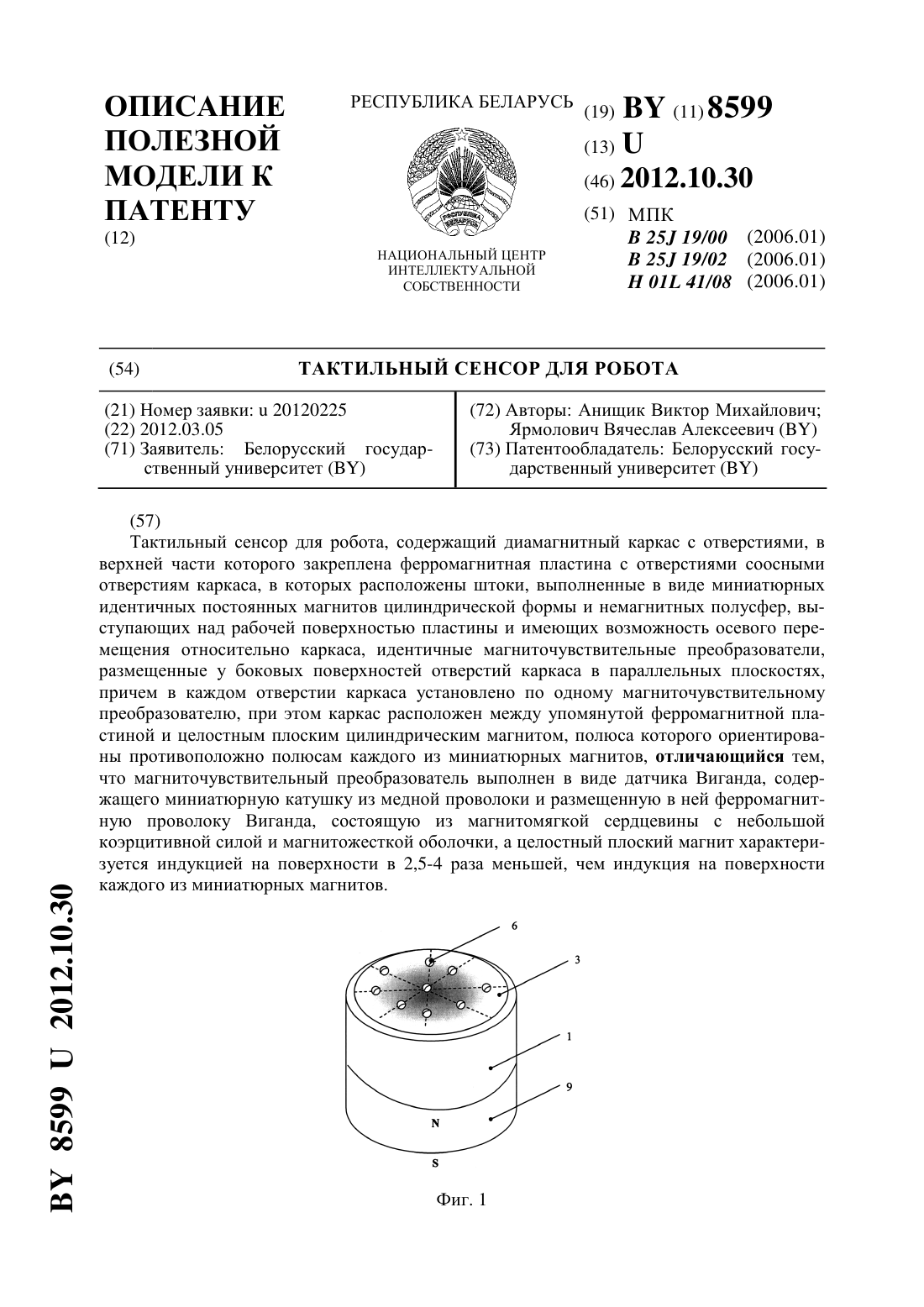
Тактильный сенсор для робота
Номер патента: U 8599
Опубликовано: 30.10.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
МПК: B25J 19/02, B25J 19/00, H01L 41/08...
Метки: тактильный, сенсор, робота
Текст:
...на поверхности каждого из миниатюрных магнитов. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению надежности при одновременном исключении энергопотребления. Решение поставленной задачи достигается тем, что в предложенном устройстве магниточувтвительный преобразователь выполнен в виде датчика Виганда 3, и имеет значительно более...
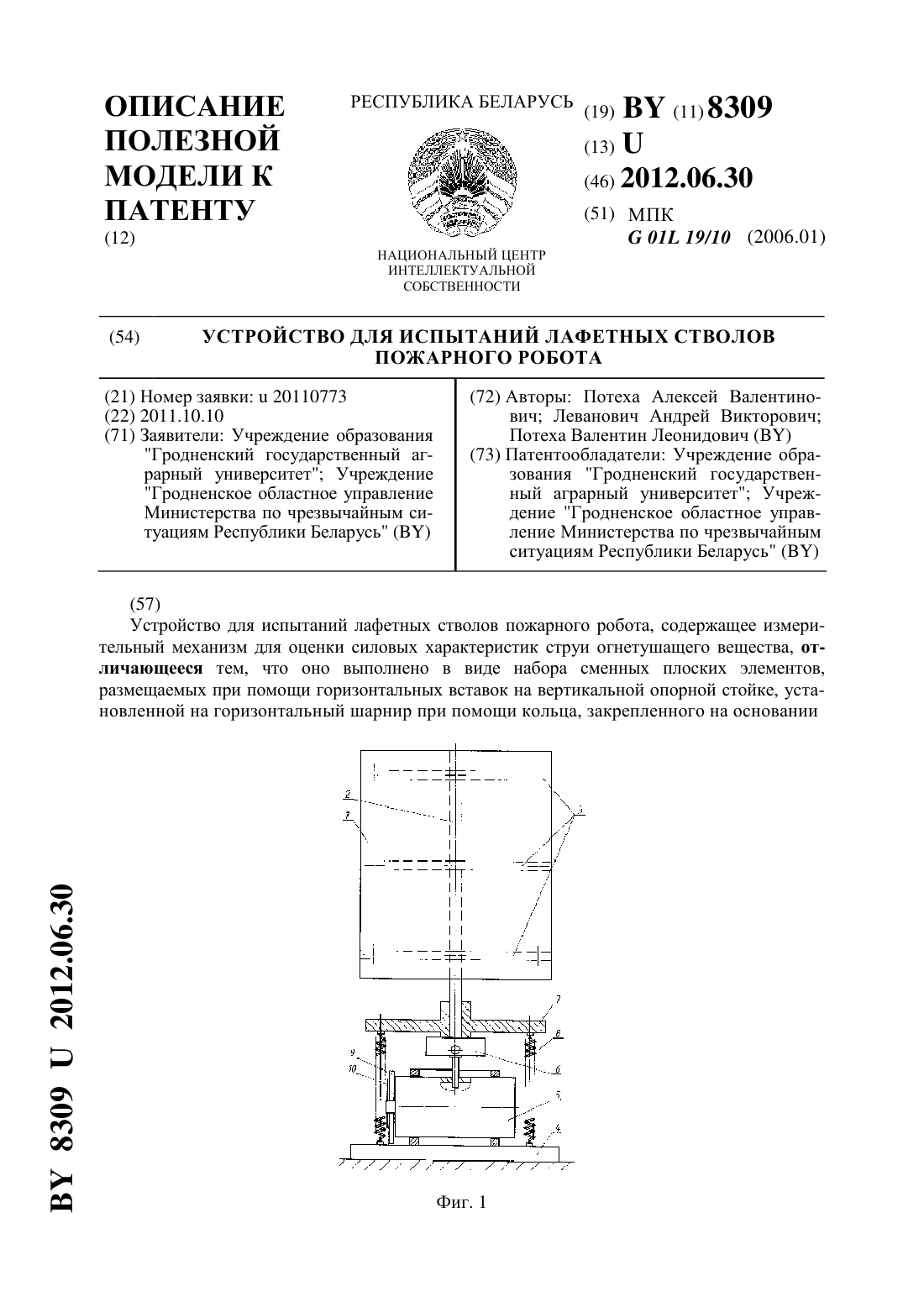
Устройство для испытаний лафетных стволов пожарного робота
Номер патента: U 8309
Опубликовано: 30.06.2012
Авторы: Леванович Андрей Викторович, Потеха Валентин Леонидович, Потеха Алексей Валентинович
МПК: G01L 19/10
Метки: испытаний, стволов, робота, лафетных, пожарного, устройство
Текст:
...определяющим не только условия труда пожарного, но и саму возможность качественно выполнить им поставленную боевую задачу. Существенным недостатком известного технического устройства для испытаний лафетных стволов является невозможность оценки силового воздействия струи огнетушащего вещества непосредственно на элементы инфраструктуры объекта, полностью или частично охваченного пожаром. При этом можно выделить два аспекта силовое...
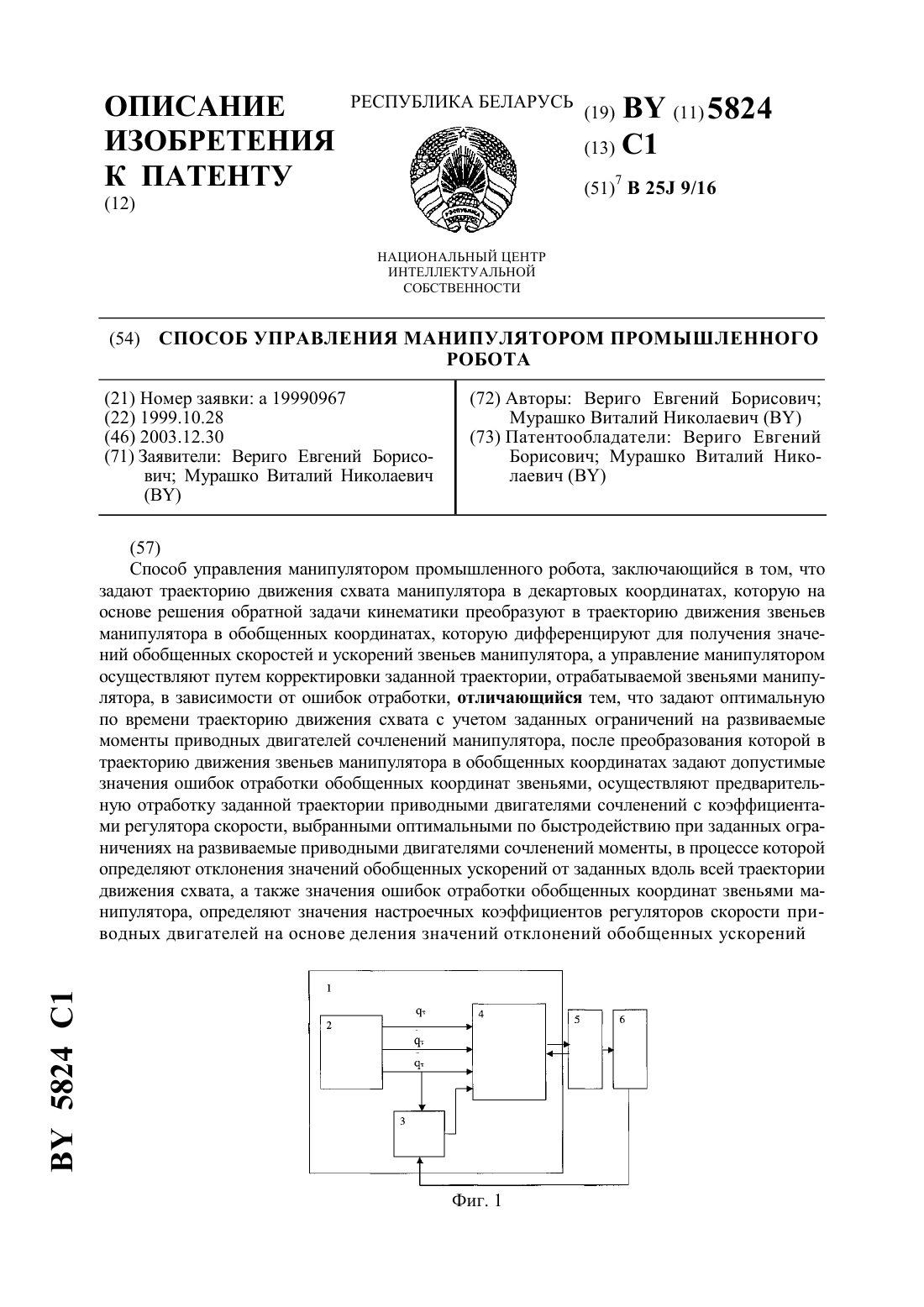
Способ управления манипулятором промышленного робота
Номер патента: 5824
Опубликовано: 30.12.2003
Авторы: Мурашко Виталий Николаевич, Вериго Евгений Борисович
МПК: B25J 9/16
Метки: промышленного, способ, управления, манипулятором, робота
Текст:
...по алгоритму, представленному в 3, учитывая ограничения по моменту приводных двигателей сочленений. Решают обратную задачу кинематики для манипулятора, определяемую выражением, где - обобщенные координаты сочленений манипулятора. Тогда для приводных двигателей сочленений манипулятора для развиваемых моментов записывают где(,) ,(, ) - нижнее предельное значение момента, развиваемого приводным двигателем -го сочленения момента,...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: манипулятором, способ, управления, промышленного, робота
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Способ управления манипулятором промышленного робота

Номер патента: 4972
Опубликовано: 30.03.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: робота, управления, манипулятором, способ, промышленного
Текст:
...схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль...
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Черкас Александр Адамович, Курч Леонид Витальевич, Филонов Игорь Павлович, Герасимов Юрий Борисович
МПК: B25J 11/00, B25J 9/16
Метки: управления, робота, промышленного, манипулятором, способ
Текст:
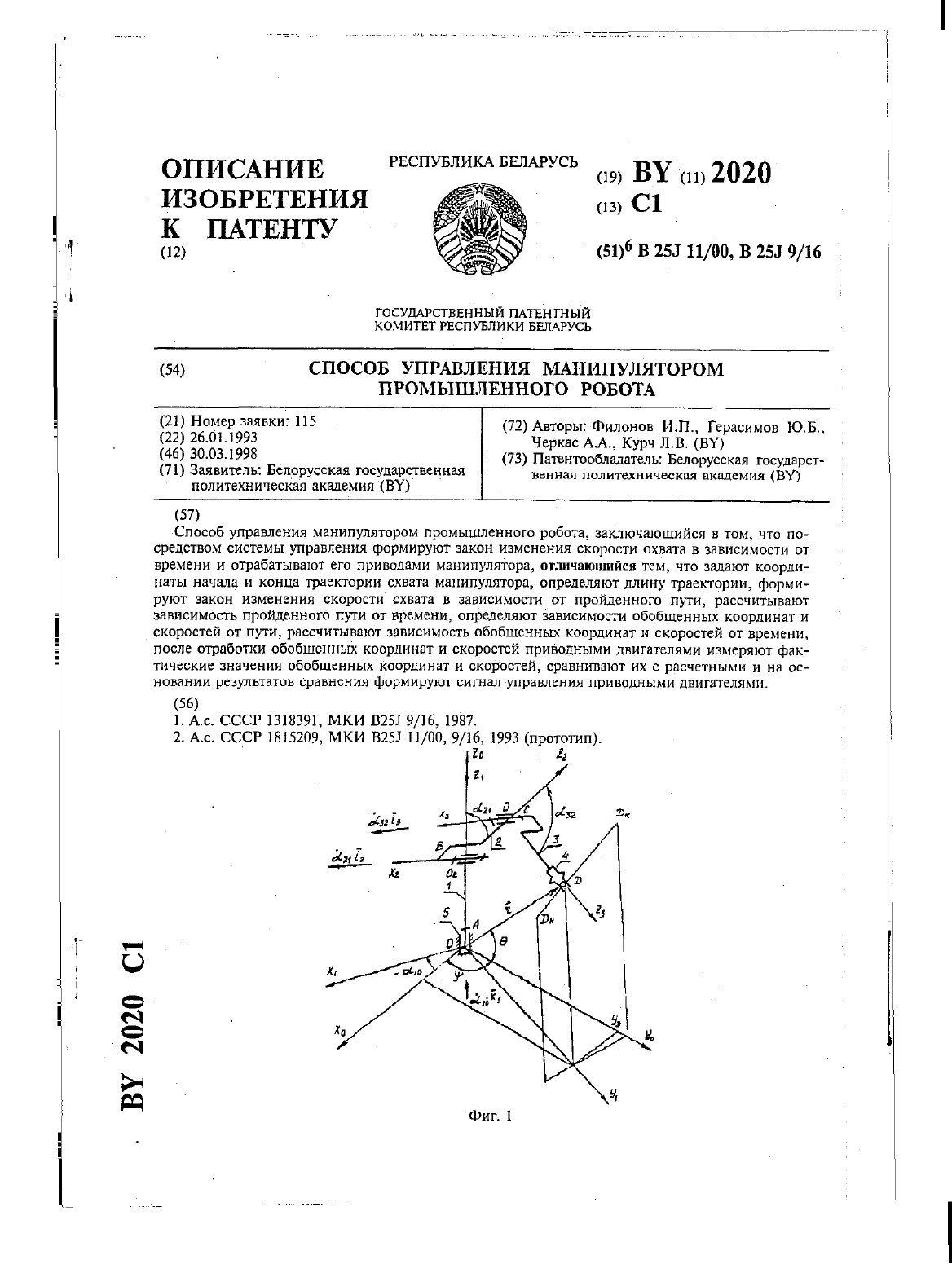
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...