Герасимов Юрий Борисович
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Курч Леонид Витальевич, Филонов Игорь Павлович, Черкас Александр Адамович, Герасимов Юрий Борисович
МПК: B25J 9/16, B25J 11/00
Метки: управления, манипулятором, робота, промышленного, способ
Текст:
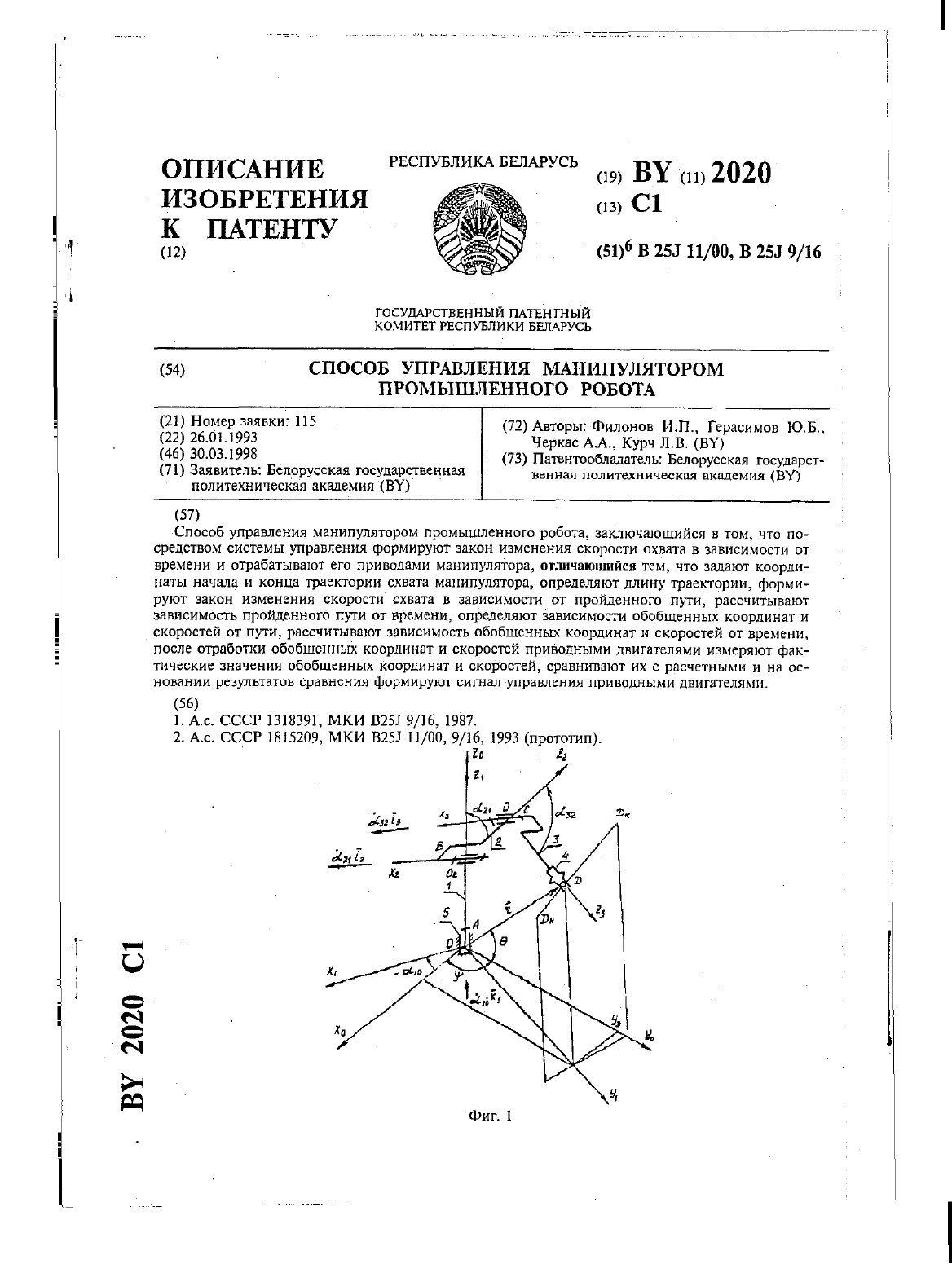
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...