Способ управления манипулятором промышленного робота
Номер патента: 5369
Опубликовано: 30.09.2003

Текст
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ ПРОМЫШЛЕННОГО РОБОТА(71) Заявитель Белорусский национальный технический университет(72) Авторы Филонов Игорь Павлович Вериго Евгений Борисович(73) Патентообладатель Белорусский национальный технический университет(57) Способ управления манипулятором промышленного робота, заключающийся в том,что перемещают схват манипулятора, отрабатывая заданную траекторию схвата приводами звеньев манипулятора, определяют фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата, отличающийся тем, что задают скорость движения схвата как некоторую функцию его перемещения, на основании заданной траектории перемещения и заданной скорости перемещения схвата манипулятора определяют обобщенные координаты и обобщенные скорости звеньев манипулятора в зависимости от перемещения схвата, определяют аналоги обобщенных скоростей звеньев манипулятора, определяют обобщенные ускорения звеньев манипулятора в зависимости от перемещения схвата, задают максимальные отклонения
МПК / Метки
МПК: B25J 9/16
Метки: управления, робота, промышленного, манипулятором, способ
Код ссылки
<a href="https://by.patents.su/9-5369-sposob-upravleniya-manipulyatorom-promyshlennogo-robota.html" rel="bookmark" title="База патентов Беларуси">Способ управления манипулятором промышленного робота</a>
Способ управления манипулятором промышленного робота

Номер патента: 4972
Опубликовано: 30.03.2003
Авторы: Филонов Игорь Павлович, Вериго Евгений Борисович
МПК: B25J 9/16
Метки: промышленного, управления, манипулятором, способ, робота
Текст:
...схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль...
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Курч Леонид Витальевич, Черкас Александр Адамович, Филонов Игорь Павлович, Герасимов Юрий Борисович
МПК: B25J 9/16, B25J 11/00
Метки: робота, манипулятором, способ, управления, промышленного
Текст:
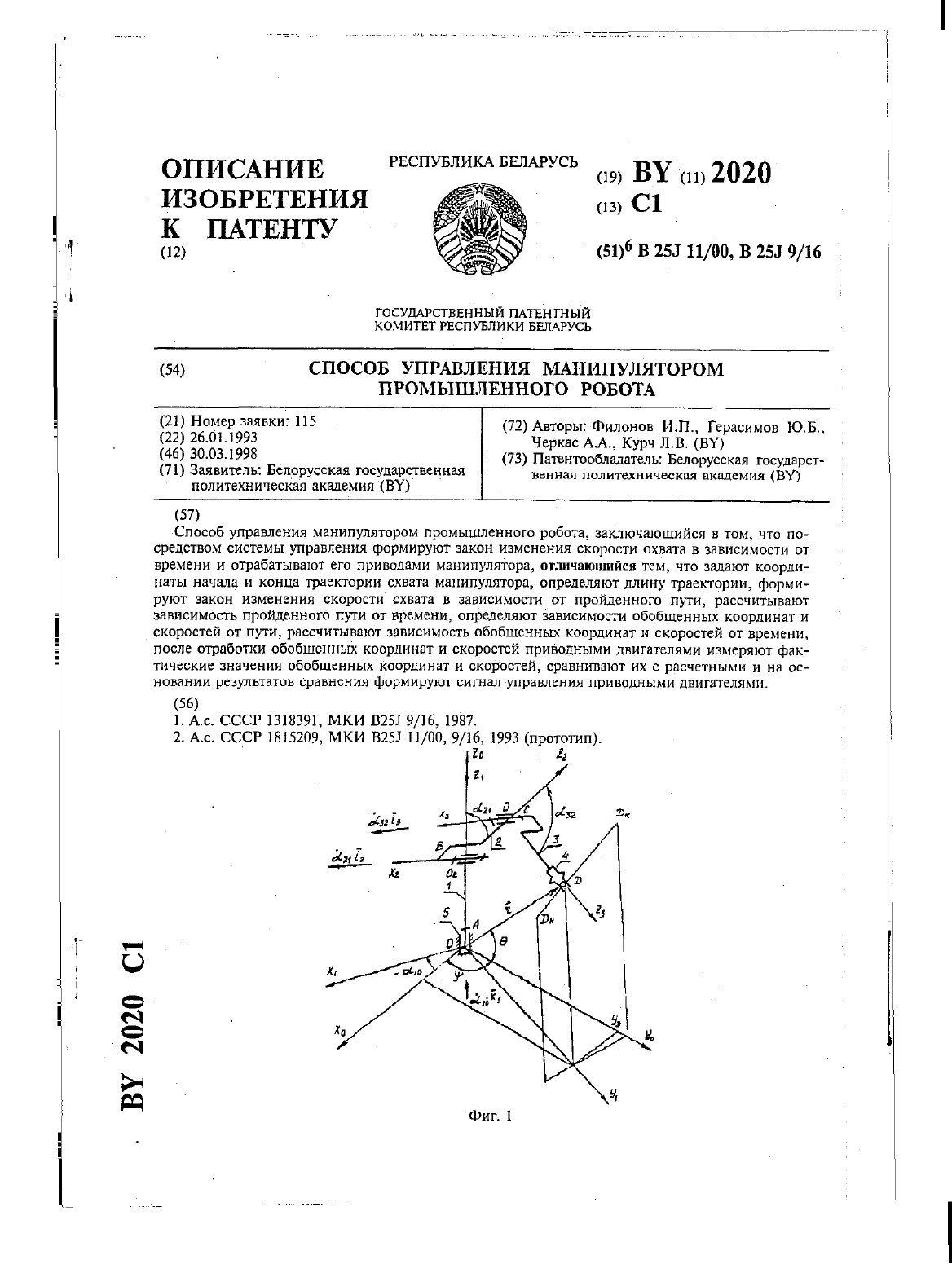
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...
Способ управления электромеханическим приводом машин
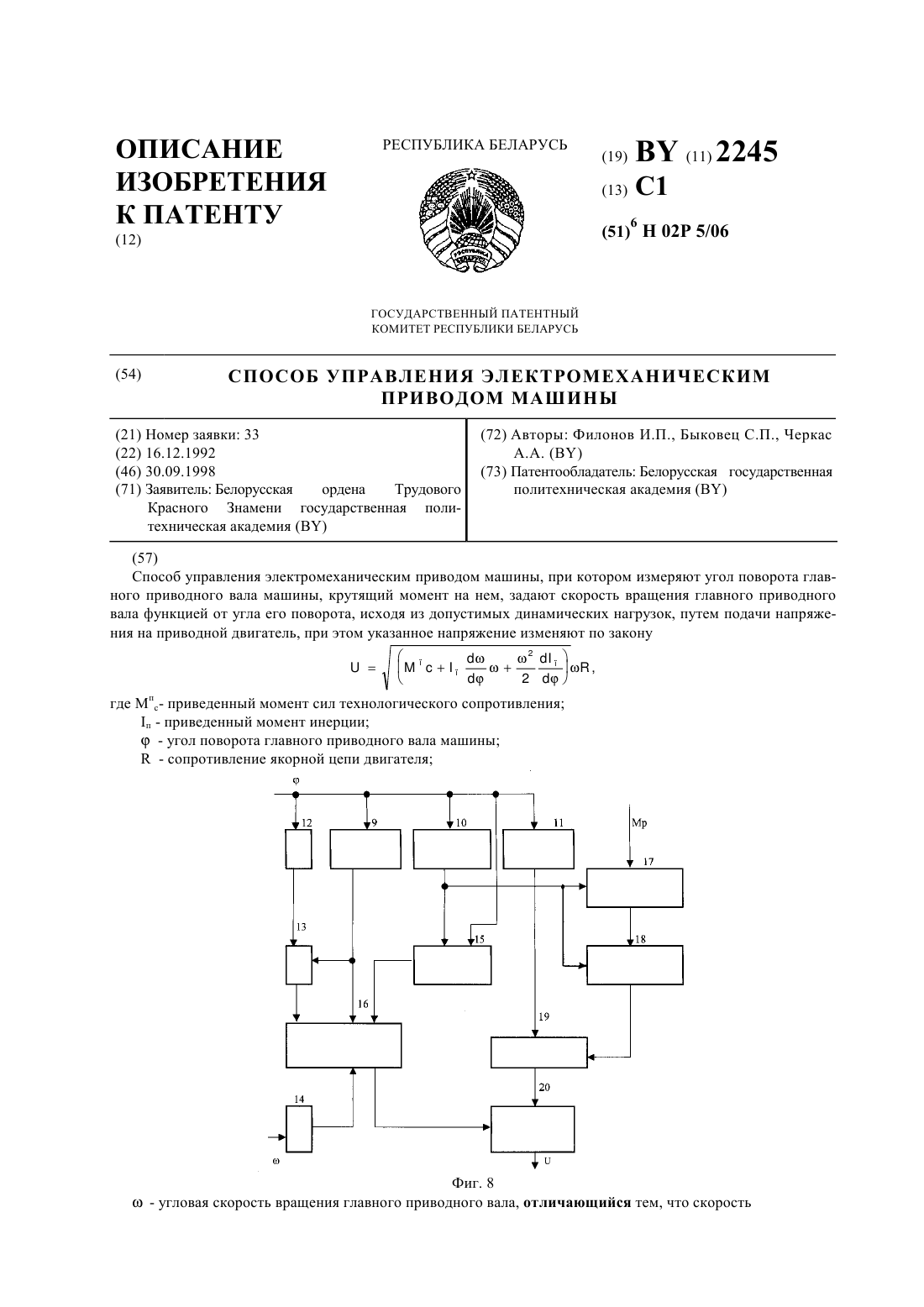
Номер патента: 2245
Опубликовано: 30.09.1998
Авторы: Быкевец С. П., Черкас А. А., Филонов И. П.
МПК: H02P 5/06
Метки: электромеханическим, машин, способ, управления, приводом
Текст:
...скоростиот нуля до ср главного приводного вала машины. 2 и, определяющие суммарное значение привеНа фигуре 5 представлены зависимости,2 денного моментадвижущих сил в функции углаповорота главного приводного вала машины. На фи гуре 6 приведена зависимость, полученная как сумма составляющих, изображенных на фигуре 5. На фиг. 7 представлена структурная схема системы управления, включающая вычислитель 1, регулятор 2,двигатель 3, датчика 4...
Способ управления мощностью роторного вертродвигателя
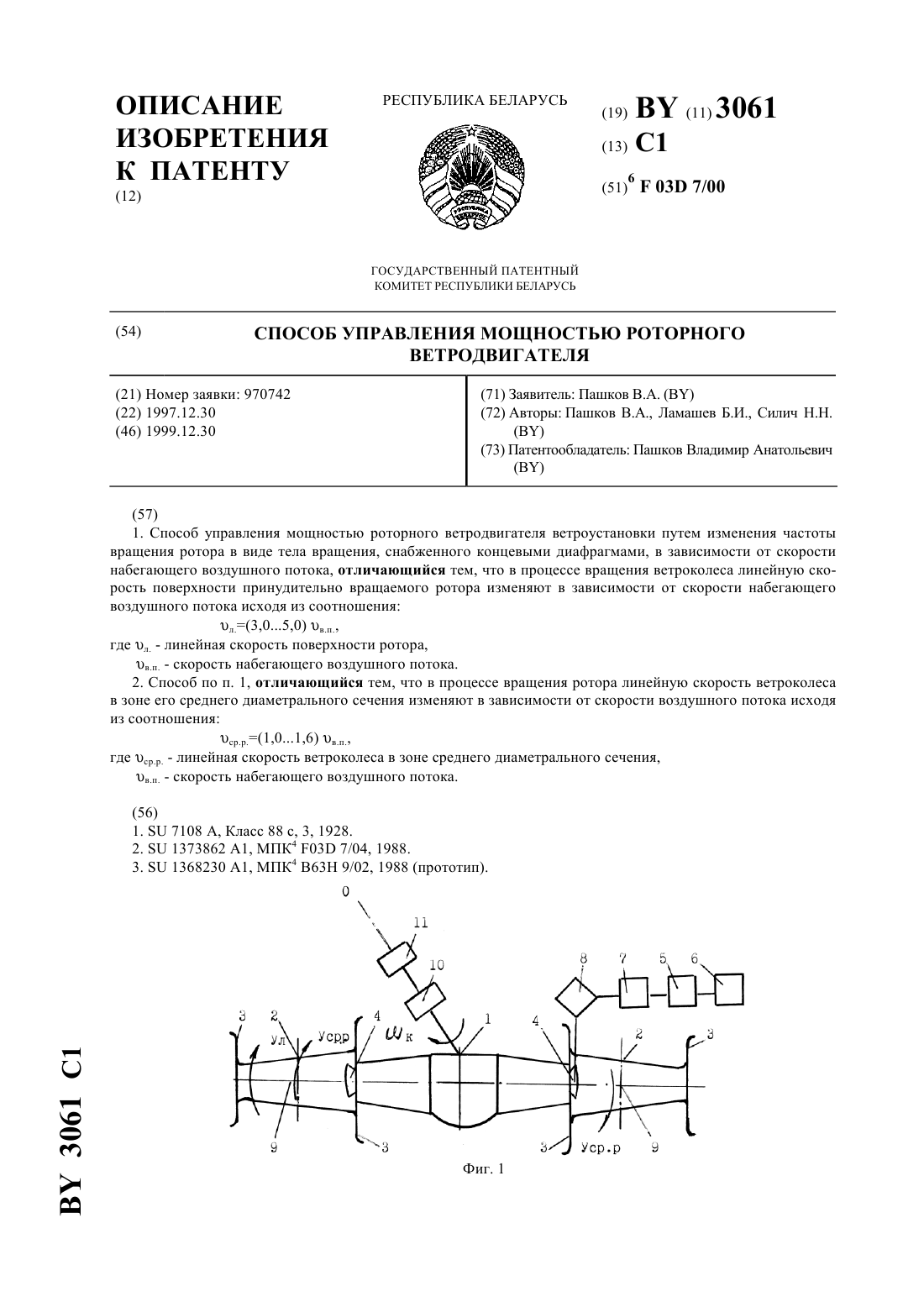
Номер патента: 3061
Опубликовано: 30.12.1999
Авторы: Силич Николай Николаевич, Пашков Владимир Анатольевич, Ламашев Борис Иванович
МПК: F03D 7/00
Метки: мощностью, управления, способ, вертродвигателя, роторного
Текст:
...вращения, снабженного концевыми диафрагмами, в зависимости от скорости набегающего воздушного потока, согласно изобретению, в процессе вращения ветроколеса линейную скорость поверхности принудительно вращаемого ротора изменяют в зависимости от скорости воздушного потока исходя из следующего соотношения л.(3,05,0) в.п.,где л. - линейная скорость поверхности ротора в.п. - скорость набегающего воздушного потока. Задача достигается также и тем,...
Способ автоматического управления процессом выщелачивания спека в мельницах мокрого помола
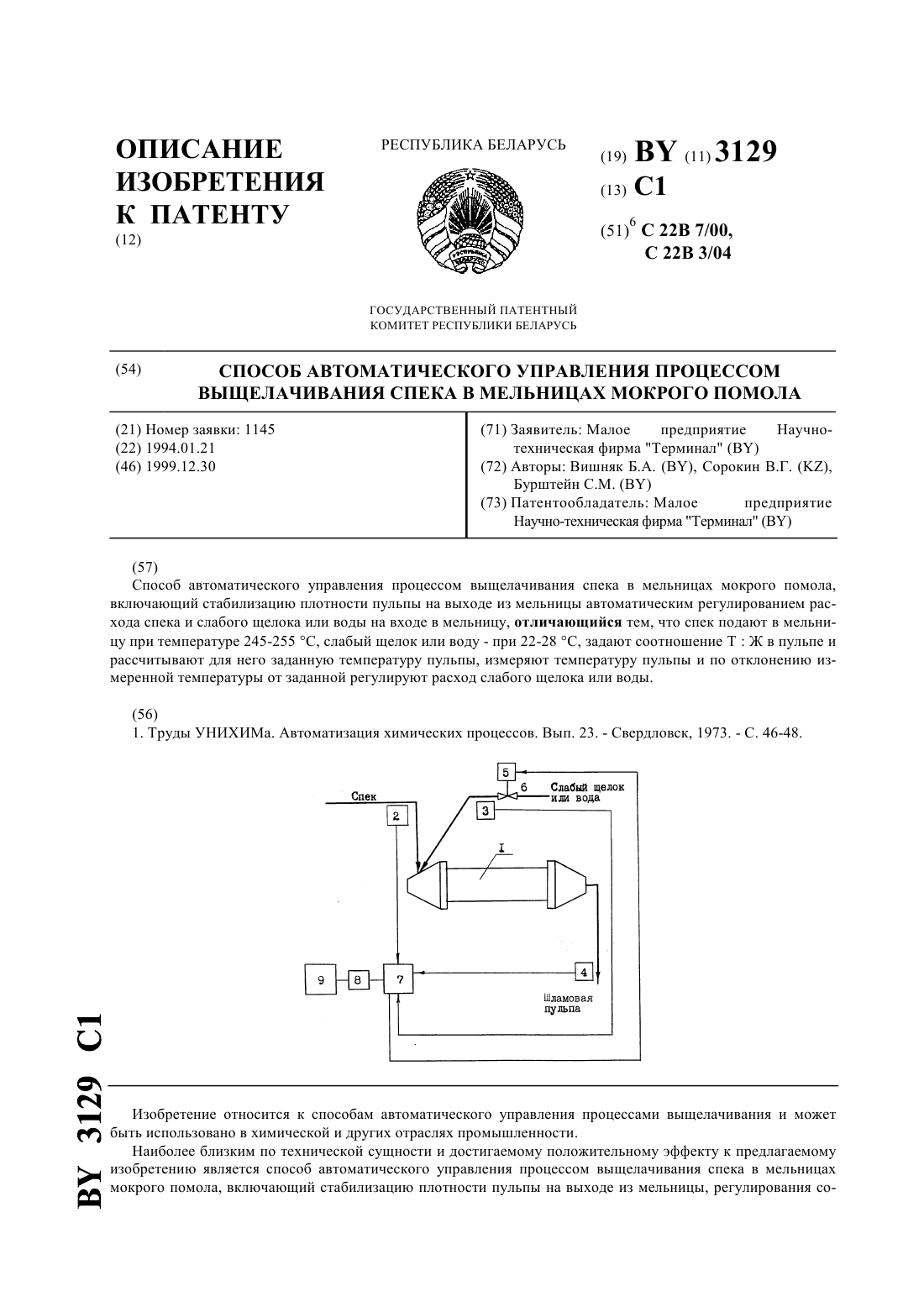
Номер патента: 3129
Опубликовано: 30.12.1999
Авторы: Сорокин Владимир Германович, Вишняк Борис Андреевич, Бурштейн Семен Михайлович
Метки: процессом, помола, мельницах, спека, автоматического, управления, способ, мокрого, выщелачивания
Текст:
...мельницы мокрого помола сп сп спсщ сщ сщшп шп шп ,(1) где п, сщ, шп - соответственно расходы спека, слабого щелока или воды и пульпы, кг/ч Ссп, Ссщ, Сшп - соответственно удельные теплоемкости спека, слабого щелока или воды и пульпы, ккал/кг град. сп, сщ, шп - соответственно температуры спека, слабого щелока или воды и пульпы, С. Учитывая, что шпспсщ , уравнение для определения шп имеет вид спспспсщсщсщ гдеЖ - заданное отношение твердой и...
Предыдущий патент: Способ изготовления малотоксичных древесностружечных плит
Следующий патент: Способ получения шовного материала для хирургии
Случайный патент: Спектрометр с коррекцией астигматизма