Вериго Евгений Борисович
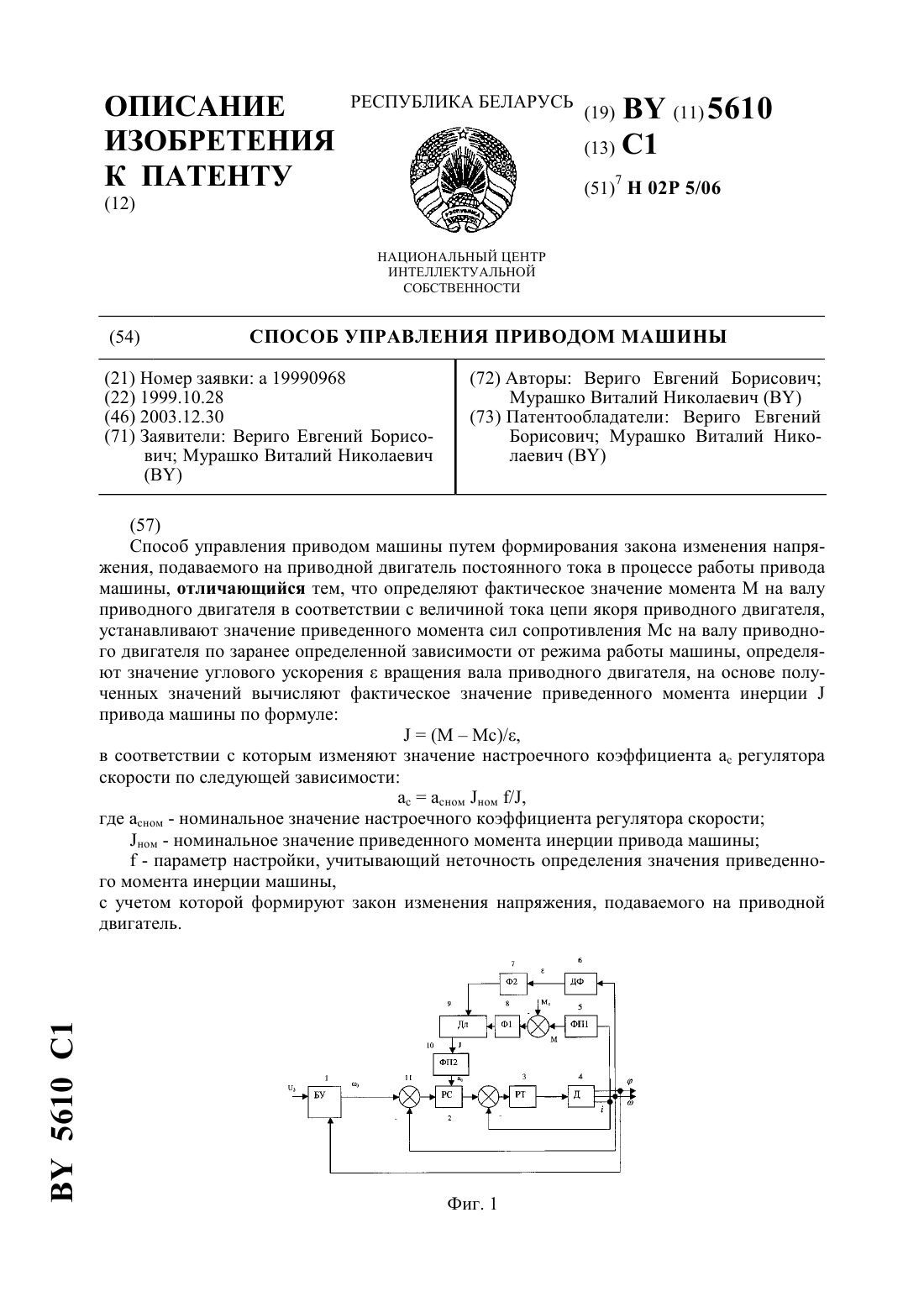
Способ управления приводом машины
Номер патента: 5610
Опубликовано: 30.12.2003
Авторы: Мурашко Виталий Николаевич, Вериго Евгений Борисович
МПК: H02P 5/06
Метки: управления, машины, приводом, способ
Текст:
...системы, при постоянном значении настроечного коэффициента регулятора скорости ас.ном, в случае изменения приведенного момента инерции, не будет обеспечиваться оптимальная настройка системы, такая, что значение времени регулирования и уровень колебательности механической части системы оставались бы оптимальными. Для обеспечения инвариантности контура скорости относительно значения приведенного момента инерции значение настроечного...
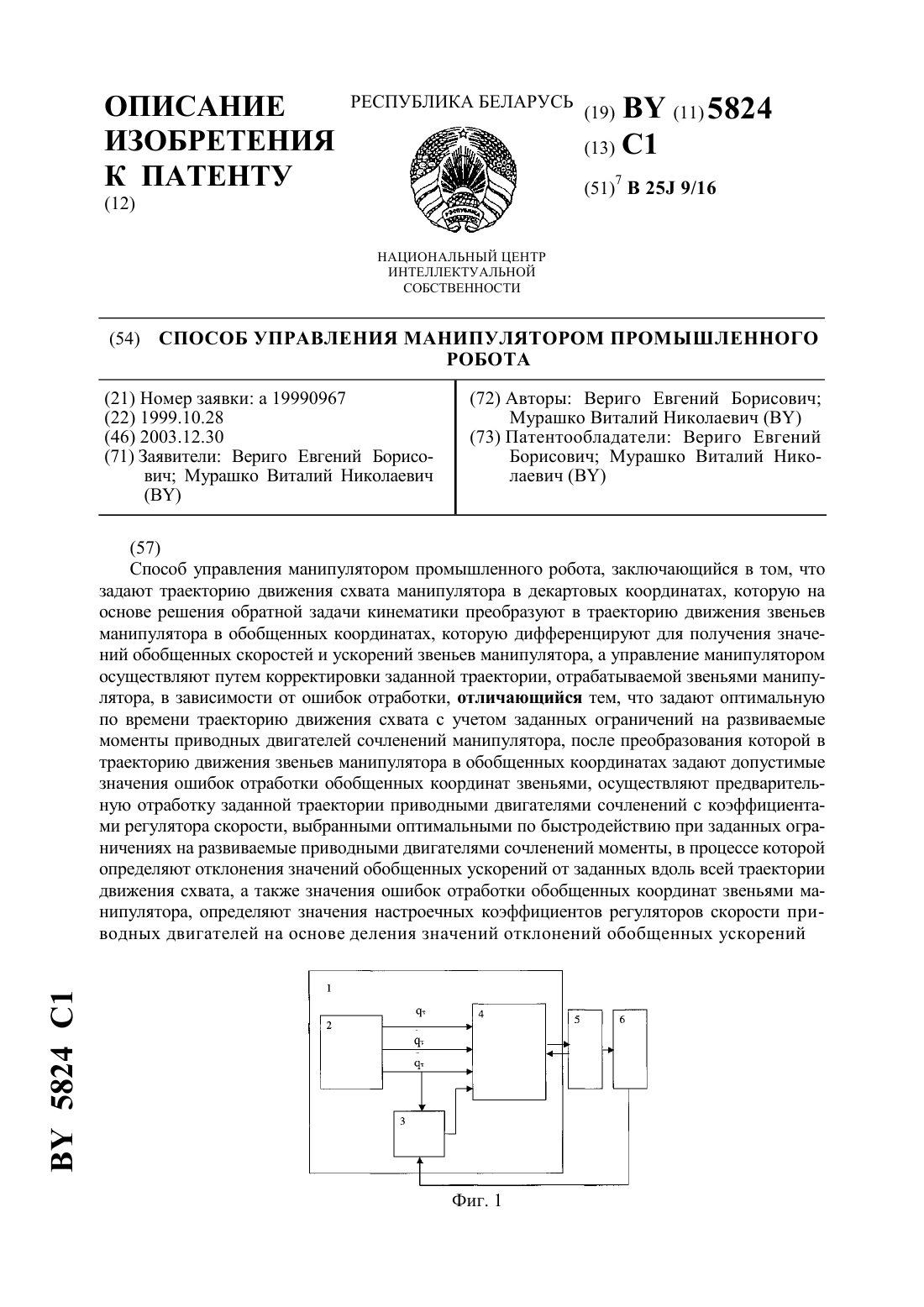
Способ управления манипулятором промышленного робота
Номер патента: 5824
Опубликовано: 30.12.2003
Авторы: Мурашко Виталий Николаевич, Вериго Евгений Борисович
МПК: B25J 9/16
Метки: управления, робота, способ, манипулятором, промышленного
Текст:
...по алгоритму, представленному в 3, учитывая ограничения по моменту приводных двигателей сочленений. Решают обратную задачу кинематики для манипулятора, определяемую выражением, где - обобщенные координаты сочленений манипулятора. Тогда для приводных двигателей сочленений манипулятора для развиваемых моментов записывают где(,) ,(, ) - нижнее предельное значение момента, развиваемого приводным двигателем -го сочленения момента,...
Способ определения положения измерительной головки манипулятора

Номер патента: 5419
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 11/00
Метки: головки, способ, положения, измерительной, манипулятора, определения
Текст:
...(2) преобразуют выражения (3) и (4) к виду х 23( 23 ) 3(6) Выражения (5) и (6) в матричной форме имеют вид где 2 - ошибка отработки обобщенной координаты 2 3 - ошибка отработки обобщенной координаты 3 х - ошибка положения измерительной головки относительно базовой оси х 0 системы координат робота у - ошибка положения измерительной головки относительно базовой оси у 0 системы координат робота. Матрица 22 в правой части матричной записи...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: управления, способ, промышленного, робота, манипулятором
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Шарнир манипулятора

Номер патента: 5083
Опубликовано: 30.03.2003
Автор: Вериго Евгений Борисович
МПК: B25J 17/00
Метки: шарнир, манипулятора
Текст:
...уменьшить износ контактирующих поверхностей сферической головки 1 и опоры 2 шарнира манипулятора. Прокладка 6 из пористого материала с микропорами служит для хранения дополнительного запаса смазывающей жидкости 7. Материал пористого тела подбирается таким,что он смачивается жидкостью высокомолекулярного полимера. Пористое тело 6 и смазывающая жидкость 7 находятся в непосредственном контакте, поэтому смазывающая жидкость под...
Способ управления манипулятором промышленного робота

Номер патента: 4972
Опубликовано: 30.03.2003
Авторы: Филонов Игорь Павлович, Вериго Евгений Борисович
МПК: B25J 9/16
Метки: промышленного, управления, манипулятором, робота, способ
Текст:
...схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль...