Способ управления манипулятором промышленного робота
Номер патента: 5824
Опубликовано: 30.12.2003
Авторы: Вериго Евгений Борисович, Мурашко Виталий Николаевич
Текст
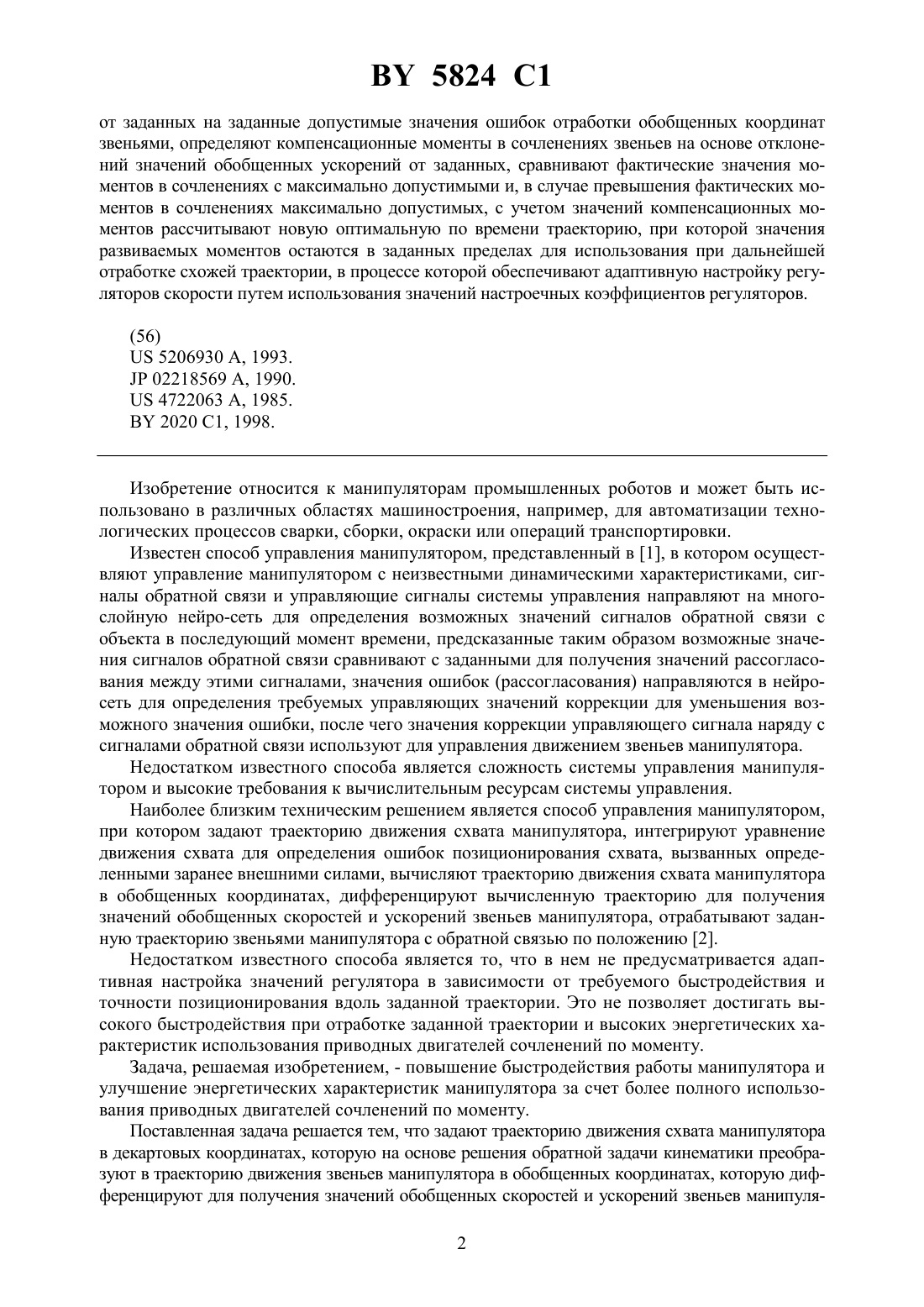
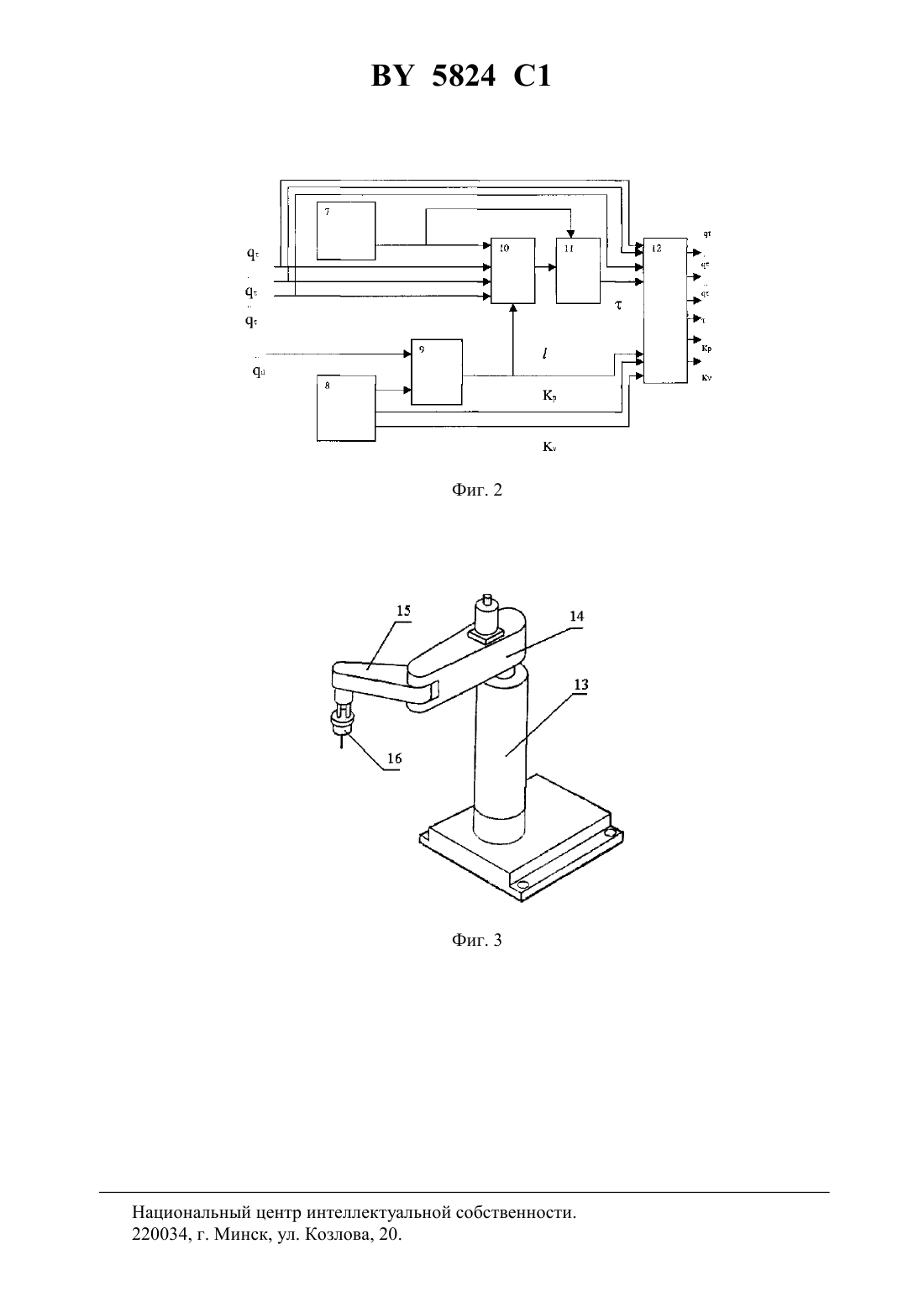
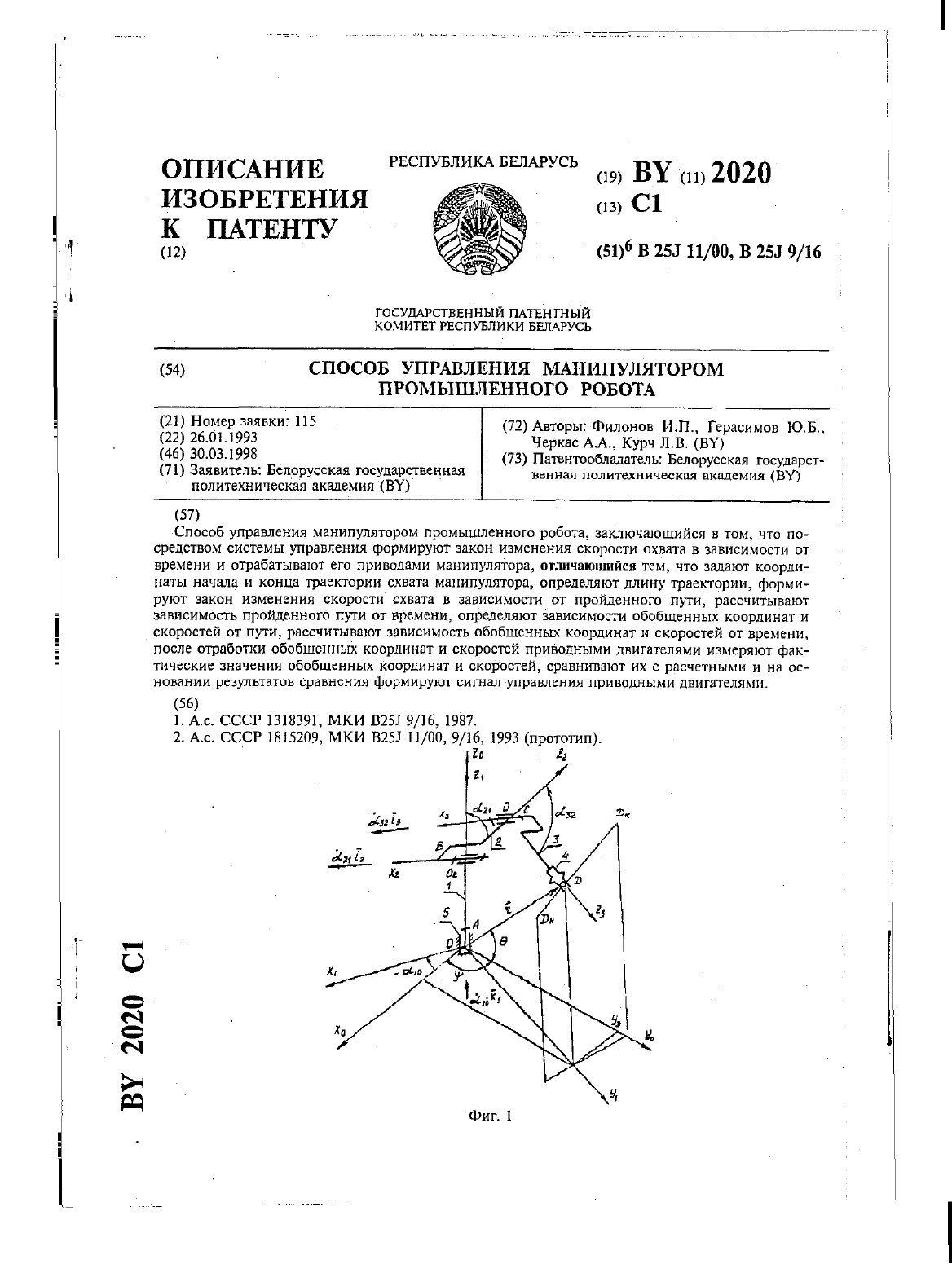
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(54) СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ ПРОМЫШЛЕННОГО(71) Заявители Вериго Евгений Борисович Мурашко Виталий Николаевич(72) Авторы Вериго Евгений Борисович Мурашко Виталий Николаевич(73) Патентообладатели Вериго Евгений Борисович Мурашко Виталий Николаевич(57) Способ управления манипулятором промышленного робота, заключающийся в том, что задают траекторию движения схвата манипулятора в декартовых координатах, которую на основе решения обратной задачи кинематики преобразуют в траекторию движения звеньев манипулятора в обобщенных координатах, которую дифференцируют для получения значений обобщенных скоростей и ускорений звеньев манипулятора, а управление манипулятором осуществляют путем корректировки заданной траектории, отрабатываемой звеньями манипулятора, в зависимости от ошибок отработки, отличающийся тем, что задают оптимальную по времени траекторию движения схвата с учетом заданных ограничений на развиваемые моменты приводных двигателей сочленений манипулятора, после преобразования которой в траекторию движения звеньев манипулятора в обобщенных координатах задают допустимые значения ошибок отработки обобщенных координат звеньями, осуществляют предварительную отработку заданной траектории приводными двигателями сочленений с коэффициентами регулятора скорости, выбранными оптимальными по быстродействию при заданных ограничениях на развиваемые приводными двигателями сочленений моменты, в процессе которой определяют отклонения значений обобщенных ускорений от заданных вдоль всей траектории движения схвата, а также значения ошибок отработки обобщенных координат звеньями манипулятора, определяют значения настроечных коэффициентов регуляторов скорости приводных двигателей на основе деления значений отклонений обобщенных ускорений 5824 1 от заданных на заданные допустимые значения ошибок отработки обобщенных координат звеньями, определяют компенсационные моменты в сочленениях звеньев на основе отклонений значений обобщенных ускорений от заданных, сравнивают фактические значения моментов в сочленениях с максимально допустимыми и, в случае превышения фактических моментов в сочленениях максимально допустимых, с учетом значений компенсационных моментов рассчитывают новую оптимальную по времени траекторию, при которой значения развиваемых моментов остаются в заданных пределах для использования при дальнейшей отработке схожей траектории, в процессе которой обеспечивают адаптивную настройку регуляторов скорости путем использования значений настроечных коэффициентов регуляторов.(56)5206930 , 1993.02218569 , 1990.4722063 , 1985.2020 1, 1998. Изобретение относится к манипуляторам промышленных роботов и может быть использовано в различных областях машиностроения, например, для автоматизации технологических процессов сварки, сборки, окраски или операций транспортировки. Известен способ управления манипулятором, представленный в 1, в котором осуществляют управление манипулятором с неизвестными динамическими характеристиками, сигналы обратной связи и управляющие сигналы системы управления направляют на многослойную нейро-сеть для определения возможных значений сигналов обратной связи с объекта в последующий момент времени, предсказанные таким образом возможные значения сигналов обратной связи сравнивают с заданными для получения значений рассогласования между этими сигналами, значения ошибок (рассогласования) направляются в нейросеть для определения требуемых управляющих значений коррекции для уменьшения возможного значения ошибки, после чего значения коррекции управляющего сигнала наряду с сигналами обратной связи используют для управления движением звеньев манипулятора. Недостатком известного способа является сложность системы управления манипулятором и высокие требования к вычислительным ресурсам системы управления. Наиболее близким техническим решением является способ управления манипулятором,при котором задают траекторию движения схвата манипулятора, интегрируют уравнение движения схвата для определения ошибок позиционирования схвата, вызванных определенными заранее внешними силами, вычисляют траекторию движения схвата манипулятора в обобщенных координатах, дифференцируют вычисленную траекторию для получения значений обобщенных скоростей и ускорений звеньев манипулятора, отрабатывают заданную траекторию звеньями манипулятора с обратной связью по положению 2. Недостатком известного способа является то, что в нем не предусматривается адаптивная настройка значений регулятора в зависимости от требуемого быстродействия и точности позиционирования вдоль заданной траектории. Это не позволяет достигать высокого быстродействия при отработке заданной траектории и высоких энергетических характеристик использования приводных двигателей сочленений по моменту. Задача, решаемая изобретением, - повышение быстродействия работы манипулятора и улучшение энергетических характеристик манипулятора за счет более полного использования приводных двигателей сочленений по моменту. Поставленная задача решается тем, что задают траекторию движения схвата манипулятора в декартовых координатах, которую на основе решения обратной задачи кинематики преобразуют в траекторию движения звеньев манипулятора в обобщенных координатах, которую дифференцируют для получения значений обобщенных скоростей и ускорений звеньев манипуля 2 5824 1 тора, а управление манипулятором осуществляют путем корректировки заданной траектории,отрабатываемой звеньями манипулятора, в зависимости от ошибок отработки, задают оптимальную по времени траекторию движения схвата с учетом заданных ограничений на развиваемые моменты приводных двигателей сочленений манипулятора, после преобразования которой в траекторию движения звеньев манипулятора в обобщенных координатах задают допустимые значения ошибок отработки обобщенных координат звеньями, осуществляют предварительную отработку заданной траектории приводными двигателями сочленений с коэффициентами регулятора скорости, выбранными оптимальными по быстродействию при заданных ограничениях на развиваемые приводными двигателями сочленений моменты, в процессе которой определяют отклонения значений обобщенных ускорений от заданных вдоль всей траектории движения схвата, а также значения ошибок отработки обобщенных координат звеньями манипулятора, определяют значения настроечных коэффициентов регуляторов скорости приводных двигателей на основе деления значений отклонений обобщенных ускорений от заданных на заданные допустимые значения ошибок отработки обобщенных координат звеньями, определяют компенсационные моменты в сочленениях звеньев на основе отклонений значений обобщенных ускорений от заданных, сравнивают фактические значения моментов в сочленениях с максимально допустимыми и, в случае превышения фактических моментов в сочленениях максимально допустимых, с учетом значений компенсационных моментов рассчитывают новую оптимальную по времени траекторию, при которой значения развиваемых моментов остаются в заданных пределах для использования при дальнейшей отработке схожей траектории, в процессе которой обеспечивают адаптивную настройку регуляторов скорости путем использования значений настроечных коэффициентов регуляторов. Сущность предлагаемого способа поясняется чертежами, где на фиг. 1 -представлена блок-схема системы управления манипулятором промышленного робота, фиг. 2 - блоксхема модуля формирования сигналов управления манипулятором по вычисляемому моменту, фиг. 3 - схема исполнительного механизма робота семейства . Предложенный способ управления манипулятором промышленного робота основан на задании коэффициентов адаптивных регуляторов скорости в зависимости от значений функции отклонений фактических обобщенных ускорений от заданных и требуемой точности позиционирования соответствующих звеньев манипулятора. На фиг. 1 представлена блок-схема системы управления манипулятором по вычисляемому моменту. Блок-схема содержит систему управления 1, модуль задания траектории 2, модуль определения отклонений фактических обобщенных ускорений звеньев манипулятора от заданных при предварительном проходе заданной траектории 3, модуль формирования сигналов управления манипулятором 4, серво-контроллеры приводов 5 с адаптивными регуляторами, робот 6. Суть рассматриваемого способа заключается в следующем. Формируют оптимальную по времени траекторию , в базовой системе координат, например, по алгоритму, представленному в 3, учитывая ограничения по моменту приводных двигателей сочленений. Решают обратную задачу кинематики для манипулятора, определяемую выражением, где - обобщенные координаты сочленений манипулятора. Тогда для приводных двигателей сочленений манипулятора для развиваемых моментов записывают где(,) ,(, ) - нижнее предельное значение момента, развиваемого приводным двигателем -го сочленения момента, являющееся нижней границей области насыщения приводных двигателей(,),(, ) - верхнее предельное значение момента, развиваемого приводным двигателем -го сочленения момента, являющееся верхней границей области насыщения приводных двигателей- текущее значение момента, развиваемого двигателем -го сочленения. Уравнение динамики манипулятора промышленного робота может быть представляют в следующем виде, в соответствии с 3 где( )(,) - представляет номинальную динамическую модель манипулятора( ) - матрица инерционных масс(,) - матрица, учитывающая действие сил Кориолиса, трения и гравитации- вектор ускорений обобщенных координат- вектор отклонений фактических обобщенных ускорений от заданных( )- представляет моменты, возникающие в узлах манипулятора и не учитываемые номинальной моделью- моменты в сочленениях. Из уравнения (1) вектор отклонений фактических обобщенных ускорений от заданных 1 ( )(( )(,,где- представляет непосредственно действующие в узлах манипулятора моменты 3. Экспериментально доказано, что значение отклонений фактических обобщенных ус коренийявляется практически одинаковым для схожих траекторий, отрабатываемых манипулятором 3. Уравнение (1) записывают в виде(2)( )(,),где- вектор заданных значений обобщенных координат- компенсационные моменты в сочленениях манипулятора. Значенияопределяют выражением 3( )( )( ) ,Задают максимальные значения ошибок 3 прохождения заданной траекториизвеньями манипулятора. Функцию ошибки представляют в виде 3,уравнение (4) в этом случае записывают, как(5) где- представляет собой переменную составляющую ошибки положения обобщенной координаты. Рассматриваемый способ управления манипулятором заключается в том, что сформи(, ) рованную с учетом ограниченийи(, ) оптимальную по времени траекторию, соответственно для каждого звена, отрабатывают предварительно приводными двигателями сочленений один раз, после чего задают ошибку прохождения траектории 3, соответственно для каждого звена в процессе предварительного прохождения траектории определяют функцию отклонений фактических обобщенных ускорений от заданных,5824 1 соответственно для каждого звена, которые используют затем для отработки звеньями манипулятора схожих траекторий. Для настройки регуляторов на критическое демпфирование, в соответствии с 3, значения коэффициентов регуляторов находят по зависимости( )2( ) ,где- номер участка траектории. Для адаптивного регулятора значения его коэффициентов изменяют в процессе работы. Изменение значений К и К регуляторов приводных двигателей выражают зависимостями в соответствии с (6). 3 В случае вышеуказанной настройки коэффициентов регуляторов на критическое 2 демпфирование из (5) очевидно, что выражениебудет равно нулю и при этом выполняется условие оптимальности, когда ошибка позиционирования звена не превышает заданную, и при этом обеспечивается максимальное быстродействие системы. Значения отклонений фактических обобщенных ускоренийпропускают предварительно через низкочастотный фильтр для гашения высокочастотных шумов. Из уравнения(3) определяют значения компенсационных моментов , принимая с учетом вышесказанного, что( ) ляют пределы( ( ) и( ) , ограничивающие компенсационные моменты сочленений. В этом случае, если робот отрабатывает схожую траекторию с коэффициентами регулятора, определяемыми как указано выше, с управлением по вычисляемому моменту и учетом условия для компенсационного момента, тонаходится в пределах При этом точность прохождения траектории звеньями манипулятора будет не ниже 3,если при отработке траектории приводные двигатели не попадают в зону насыщения по моменту . В случае, если при отработке оптимальной по времени траекториив системе управления фиксировалось попадание приводных двигателей в зону насыщения, то ограничения по моменту приводных двигателей пересчитывают в соответствии с Затем с учетом новых ограничений по моменту определяют оптимальную по времени траекториюв соответствии с 3 снова и с учетом того, что значенияостаются неизменными, отрабатывают новую траекториюв рабочем режиме с ранее определенными параметрами системы. В соответствии со способом управления манипулятором на фиг. 2 приведена блоксхема модуля формирования сигналов управления манипулятором по вычисляемому моменту. Модуль содержит блок 7 (блок модели динамики манипулятора робота), блок 8(блок задания значений коэффициентов регуляторов), блок 9 (блок вычисления значений ошибки положения звеньев), блок 10 (блок определения значений компенсационных моментов (, блок 11 (блок вычисления значений управляющих моментов приводных двигателей манипулятора) и блок 12 (блок контроля выходных значений модуля). В случае нахождения выходных параметров модуля за заданными пределами блок контроля 5 5824 1 блокирует выходы, после чего осуществляется перерасчет значений в соответствии с данным способом управления до получения оптимальных управляющих моментови значений коэффициентов регуляторов. Предложенный способ управления может быть реализован, например, манипулятором робота семейства , схема исполнительного механизма которого представлена на фиг. 3. Манипулятор содержит подвижные звенья 13, 14 и 15. На звене 15 закреплено исполнительное устройство (сварочный электрод) 16. Манипулятор содержит одну поступательную и две вращательные кинематические пары. По сравнению с прототипом повышается быстродействие системы, так как коэффициенты настройки регуляторов являются оптимальными на всем протяжении траектории, в отличие от прототипа, где они определяются единожды и в процессе работы не изменяются. В случае использования адаптивной настройки регуляторов приводных двигателей обеспечивается наилучшее использование приводов по моменту, улучшаются энергетические характеристики системы и при этом обеспечивается высокое быстродействие и требуемая точность прохождения траектории. Таким образом, приведенный способ управления манипулятором позволяет решить поставленную задачу, заключающуюся в повышении быстродействия работы манипулятора и улучшении энергетических характеристик манипулятора, за счет того, что задают траекторию движения схвата манипулятора в декартовых координатах, которую на основе решения обратной задачи кинематики преобразуют в траекторию движения звеньев манипулятора в обобщенных координатах, которую дифференцируют для получения значений обобщенных скоростей и ускорений звеньев манипулятора, а управление манипулятором осуществляют путем корректировки заданной траектории, отрабатываемой звеньями манипулятора, в зависимости от ошибок отработки, задают оптимальную по времени траекторию движения схвата с учетом заданных ограничений на развиваемые моменты приводных двигателей сочленений манипулятора, после преобразования которой в траекторию движения звеньев манипулятора в обобщенных координатах задают допустимые значения ошибок отработки обобщенных координат звеньями, осуществляют предварительную отработку заданной траектории приводными двигателями сочленений с коэффициентами регулятора скорости, выбранными оптимальными по быстродействию при заданных ограничениях на развиваемые приводными двигателями сочленений моменты, в процессе которой определяют отклонения значений обобщенных ускорений от заданных вдоль всей траектории движения схвата, а также значения ошибок отработки обобщенных координат звеньями манипулятора, определяют значения настроечных коэффициентов регуляторов скорости приводных двигателей на основе деления значений отклонений обобщенных ускорений от заданных на заданные допустимые значения ошибок отработки обобщенных координат звеньями, определяют компенсационные моменты в сочленениях звеньев на основе отклонений значений обобщенных ускорений от заданных, сравнивают фактические значения моментов в сочленениях с максимально допустимыми и, в случае превышения фактических моментов в сочленениях максимально допустимых, с учетом значений компенсационных моментов рассчитывают новую оптимальную по времени траекторию, при которой значения развиваемых моментов остаются в заданных пределах для использования при дальнейшей отработке схожей траектории, в процессе которой обеспечивают адаптивную настройку регуляторов скорости путем использования значений настроечных коэффициентов регуляторов. Источники информации 1. Патент США 5428559, МПК 05 13/04, 1995. 2. Патент США 5206930, МПК 05 19/18, 1993. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: B25J 9/16
Метки: промышленного, манипулятором, способ, управления, робота
Код ссылки
<a href="https://by.patents.su/7-5824-sposob-upravleniya-manipulyatorom-promyshlennogo-robota.html" rel="bookmark" title="База патентов Беларуси">Способ управления манипулятором промышленного робота</a>
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: промышленного, робота, манипулятором, способ, управления
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Способ управления манипулятором промышленного робота

Номер патента: 4972
Опубликовано: 30.03.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: управления, робота, манипулятором, способ, промышленного
Текст:
...схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль...
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Курч Леонид Витальевич, Герасимов Юрий Борисович, Черкас Александр Адамович, Филонов Игорь Павлович
МПК: B25J 11/00, B25J 9/16
Метки: робота, промышленного, манипулятором, способ, управления
Текст:
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...
Способ управления перемещением удлиненного элемента
Номер патента: 4300
Опубликовано: 30.03.2002
Авторы: Вильфрид БОДЕН, Карстен КЛЕЙЕ
МПК: F28G 1/16
Метки: способ, перемещением, управления, удлиненного, элемента
Текст:
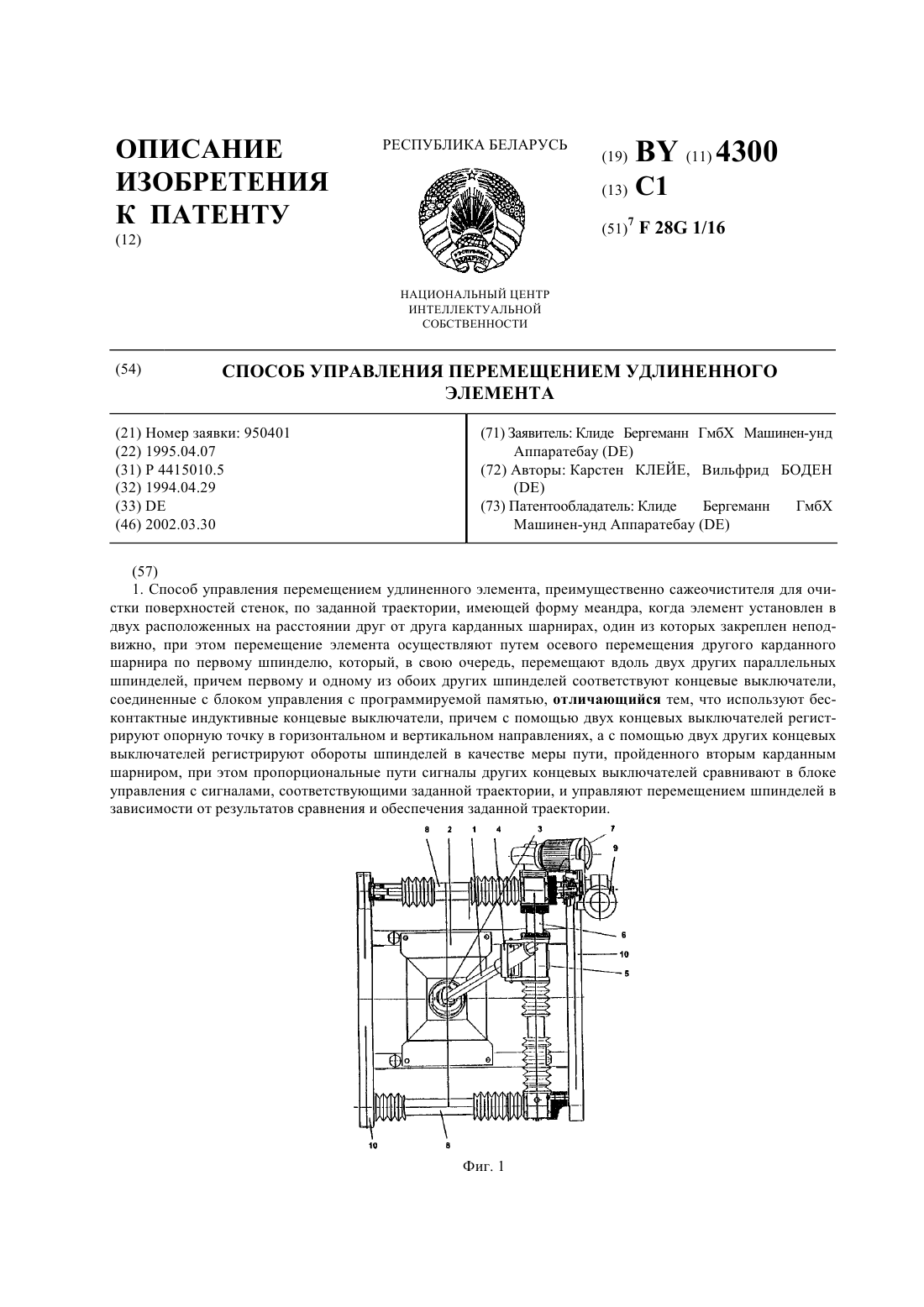
...траектории, и управляют перемещением шпинделей в зависимости от результатов сравнения и обеспечения заданной траектории. Предпочтительно шпиндели приводят во вращение посредством тормозных двигателей трехфазного тока с регулируемой частотой вращения, при этом частоту вращения тормозных двигателей трехфазного тока следует изменять по сигналам с блока управления. За счет подобного регулирования частоты вращения можно варьировать...
Способ управления антиблокированием колеса при торможении
Номер патента: 5566
Опубликовано: 30.09.2003
Авторы: Лещинский Андрей Иосифович, Бутылин Владимир Григорьевич, Лепешко Иосиф Иосифович, Иванов Валентин Георгиевич
МПК: B60T 8/58
Метки: управления, колеса, способ, антиблокированием, торможении
Текст:
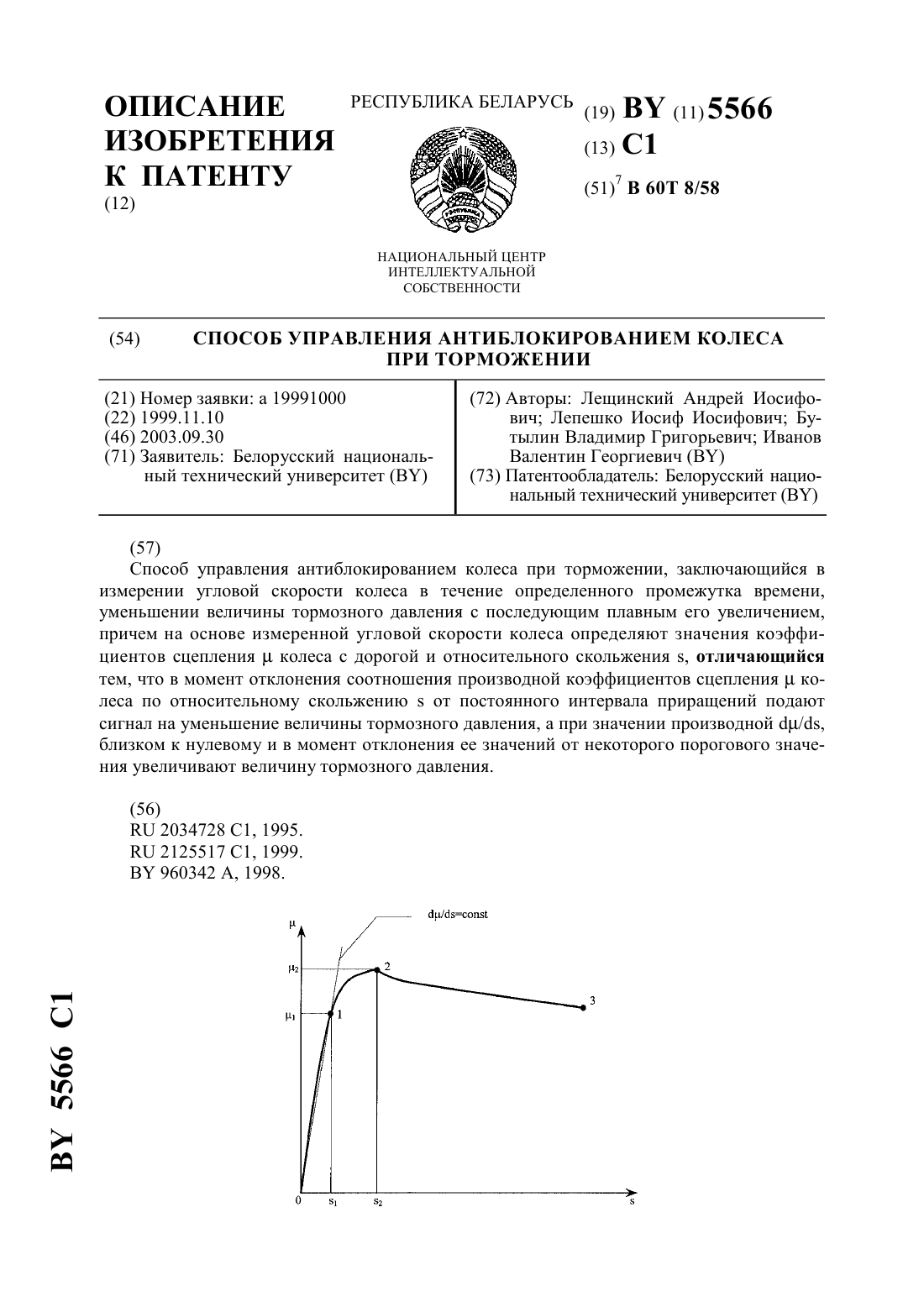
...тормозного давления от момента начала периода управления. Сравнивают промежуток времениот момента увеличения скорости 1 до скорости , которая увеличилась только на заданную величину, соответствующую первой доли от разности А. В случае превышения промежутком временизаданного промежутка времениопределяют на основе среднего ускорения за этот промежутокпервый промежуток времени Тх плавного увеличения тормозного давления. В случае, если...
Предыдущий патент: Пункционная игла
Следующий патент: Способ управления приводом машины
Случайный патент: Установка перегруппировки циклогексаноноксима в капролактам