Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы
Номер патента: U 6657
Опубликовано: 30.10.2010
Авторы: Карпович Святослав Евгеньевич, Литвинов Егор Алексеевич
Текст
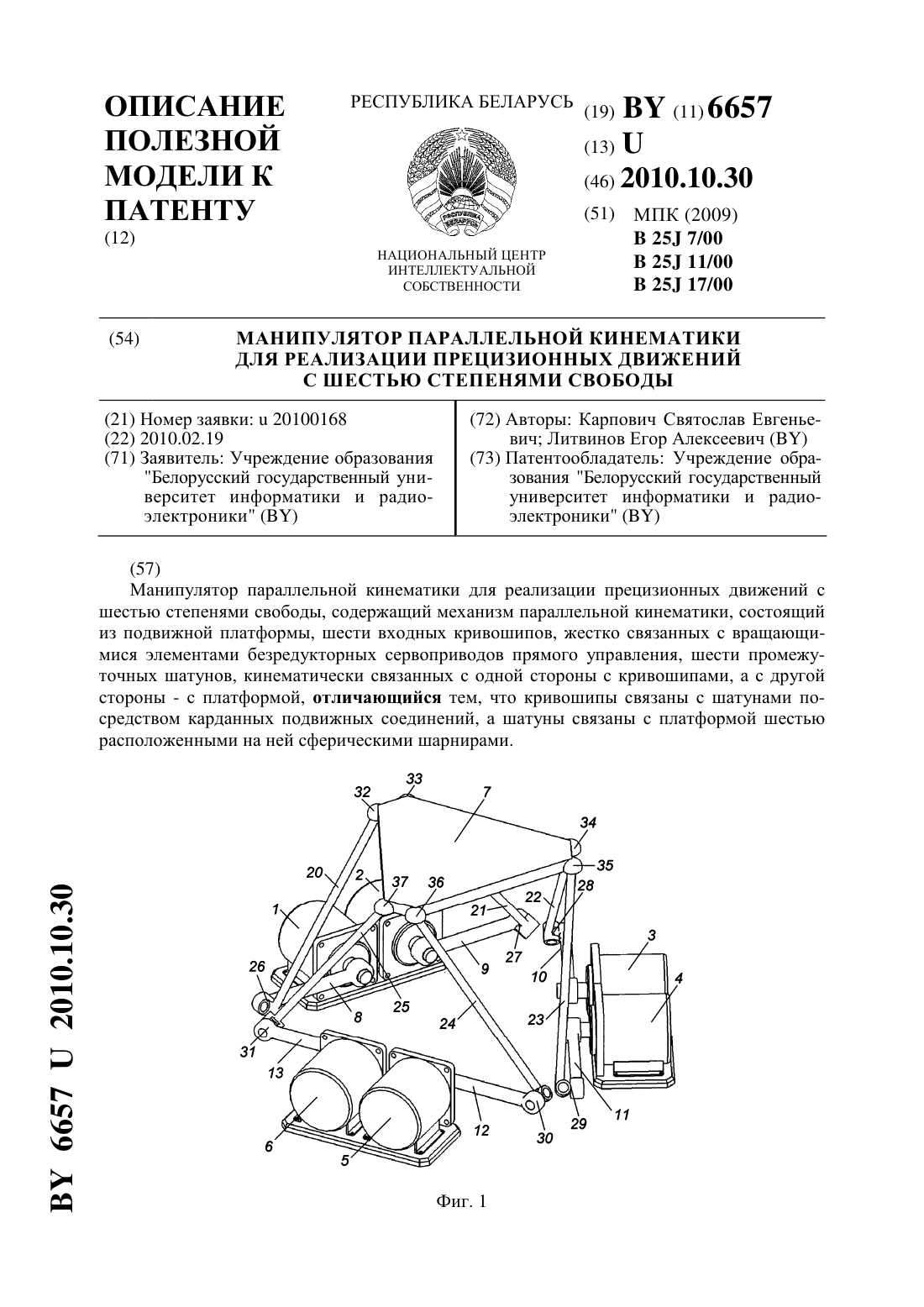
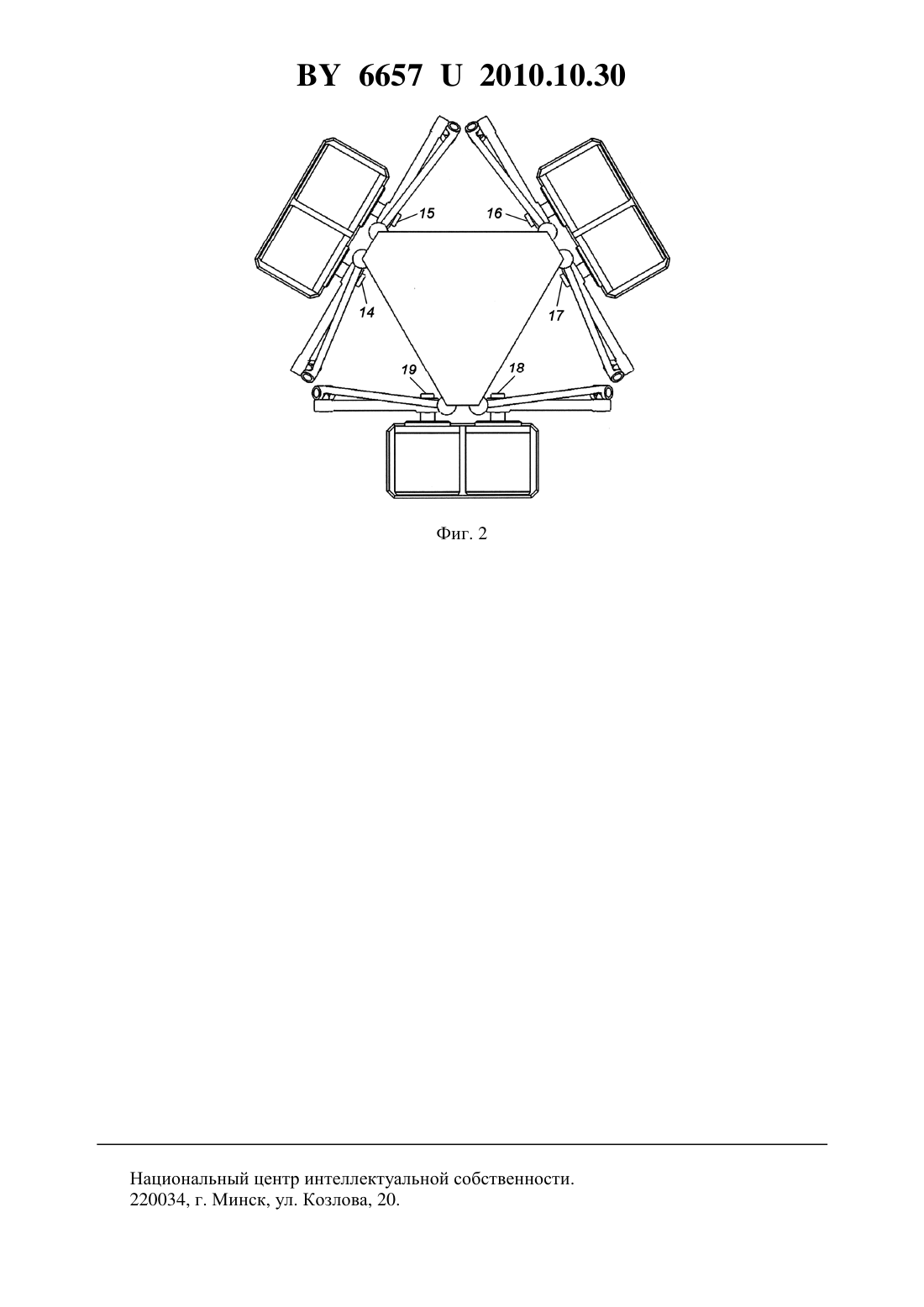
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ КИНЕМАТИКИ ДЛЯ РЕАЛИЗАЦИИ ПРЕЦИЗИОННЫХ ДВИЖЕНИЙ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ(71) Заявитель Учреждение образования Белорусский государственный университет информатики и радиоэлектроники(72) Авторы Карпович Святослав Евгеньевич Литвинов Егор Алексеевич(73) Патентообладатель Учреждение образования Белорусский государственный университет информатики и радиоэлектроники(57) Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы, содержащий механизм параллельной кинематики, состоящий из подвижной платформы, шести входных кривошипов, жестко связанных с вращающимися элементами безредукторных сервоприводов прямого управления, шести промежуточных шатунов, кинематически связанных с одной стороны с кривошипами, а с другой стороны - с платформой, отличающийся тем, что кривошипы связаны с шатунами посредством карданных подвижных соединений, а шатуны связаны с платформой шестью расположенными на ней сферическими шарнирами. Полезная модель относится к области приборостроения и может быть использована для построения оборудования с возможностью реализации прецизионных движений с шестью степенями свободы объекта в пространстве. Известен параллельный манипулятор 1, состоящий из платформы, набора жестких продольных кинематических звеньев, каждое из которых соединено посредством сферических шарниров одним концом с платформой, а другим с исполнительным элементом соответствующего силового привода. Каждый из силовых приводов, установленных в основании системы, выполняя программные команды управляющего контроллера параллельного манипулятора, реализует прямолинейные вертикальные возвратно-поступательные перемещения исполнительного элемента, обеспечивая, совместно с другими силовыми приводами, движение с шестью степенями свободы мобильной платформы. Недостатками данного манипулятора являются сложное конструктивное решение и малая рабочая область. Наиболее близким аналогом к предлагаемому решению по совокупности признаков является микроманипулятор параллельной кинематики с пьезоэлектрическими линейными приводами 2, содержащий жесткое кольцеобразное основание, установленные на нем с помощью сферических шарниров шесть опорных активных кинематических звеньев, удлиняемых посредством управляемых пьезоэлектрических линейных приводов, кольцеобразной платформы, связанной с опорными кинематическими звеньями посредством шарнирных соединений. Конструктивно-технологические особенности данного микроманипулятора позволяют реализовывать прецизионные движения платформы с шестью степенями свободы. Недостатками этого манипулятора являются высокая инерционность системы и низкие динамические характеристики движения платформы ввиду конструктивного расположения управляющих приводов непосредственно на подвижных кинематических звеньях. Задачей, на решение которой направлена заявляемая полезная модель, является создание манипулятора с возможностью реализации прецизионных движений с шестью степенями свободы. Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы, содержащий механизм параллельной кинематики, состоящий из подвижной платформы, шести входных кривошипов, жестко связанных с вращающимися элементами безредукторных сервоприводов прямого управления, шести промежуточных шатунов, кинематически связанных с одной стороны с кривошипами, а с другой стороны - с платформой, отличающейся тем, что кривошипы связаны с шатунами посредством карданных подвижных соединений, а шатуны связаны с платформой шестью расположенными на ней сферическими шарнирами. Технический результат состоит в объективной способности формирования манипулятором прецизионных, одновременно по трем координатным направлениям и трем ориентациям, с высокими динамическими характеристиками, движений с шестью степенями свободы объекта в пространстве. 66572010.10.30 Данный технический результат достигается за счет конструктивно-технологических особенностей манипулятора параллельной кинематики для реализации прецизионных движений с шестью степенями свободы, заключающихся в использовании шести безредукторных сервоприводов прямого управления с их работой в микрошаговом режиме, установленных попарно в основании системы, механизма параллельной кинематики заданной конфигурации, состоящего из подвижной платформы, шести входных кривошипов, жестко связанных с вращающимися элементами приводов, шести промежуточных шатунов, кинематически связанных с одной стороны с кривошипами посредством карданных подвижных соединений, а с другой стороны - с платформой посредством расположенных на ней соответствующих сферических шарниров. Применение в решении механизма параллельной кинематики выбранной конфигурации обеспечивает высокую жесткость всей конструкции и устойчивость к инерционным механическим колебаниям за счет особенностей замкнутых кинематических цепей механизма, что существенно повышает динамическую точность манипулятора. Расположение сервоприводов в основании системы манипулятора и использование тонких рычагов в кинематических цепях параллельного механизма обеспечивает низкую инерционность системы, что позволяет повысить, в сравнении с выбранным аналогом,точность позиционирования системы на высоких скоростях и уменьшить динамическую ошибку. Сервоприводы прямого управления манипулятора за счет электронного дробления шага позволяют реализовывать микрошаговые поворотные движения кривошипов механизма параллельной кинематики без использования механических редукторов, тем самым обеспечивая высокие выходные характеристики точности манипулятора. На фиг. 1 показан общий вид манипулятора параллельной кинематики для реализации прецизионных движений с шестью степенями свободы. На фиг. 2 показан вид сверху манипулятора параллельной кинематики для реализации прецизионных движений с шестью степенями свободы. Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы (см. фиг. 1 и фиг. 2) состоит из безредукторных сервоприводов прямого управления 1, 2, 3, 4, 5, 6, попарно расположенных в основании системы, подвижной платформы 7, входных кривошипов 8, 9, 10, 11, 12, 13, жестко связанных с вращающимися элементами 14, 15, 16, 17, 18, 19 приводов соответственно, промежуточных шатунов 20, 21, 22, 23, 24, 25, причем кривошипы связаны с шатунами посредством карданных подвижных соединений 26, 27, 28, 29, 30, 31, а шатуны связаны с платформой шестью расположенными на ней сферическими шарнирами 32, 33, 34, 35, 36, 37. Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы работает следующим образом. При вращении кривошипов 8,9, 10, 11, 12, 13, законы движения которых задаются управляющими сервоприводами 1, 2,3, 4, 5, 6 соответственно, через карданные подвижные соединения 26, 27, 28, 29, 30, 31,промежуточные шатуны 20, 21, 22, 23, 24, 25 и сферические шарниры 32, 33, 34, 35, 36, 37 приводится в движение платформа 7. В зависимости от задаваемых углов поворота кривошипов 8, 9, 10, 11, 12, 13 платформа 7 принимает однозначно соответствующие им положение и ориентацию в пространстве. Предложенный параллельный манипулятор позволяет реализовывать движения с шестью степенями свободы подвижной платформы в соответствии с задаваемыми на входе законами поворота кривошипов. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B25J 7/00, B25J 11/00, B25J 17/00
Метки: степенями, движений, шестью, кинематики, прецизионных, манипулятор, параллельной, реализации, свободы
Код ссылки
<a href="https://by.patents.su/4-u6657-manipulyator-parallelnojj-kinematiki-dlya-realizacii-precizionnyh-dvizhenijj-s-shestyu-stepenyami-svobody.html" rel="bookmark" title="База патентов Беларуси">Манипулятор параллельной кинематики для реализации прецизионных движений с шестью степенями свободы</a>
Манипулятор
Номер патента: U 1137
Опубликовано: 30.12.2003
Авторы: Коничев Алексей Викторович, Колесников Иван Федорович
МПК: B66C 23/10
Метки: манипулятор
Текст:
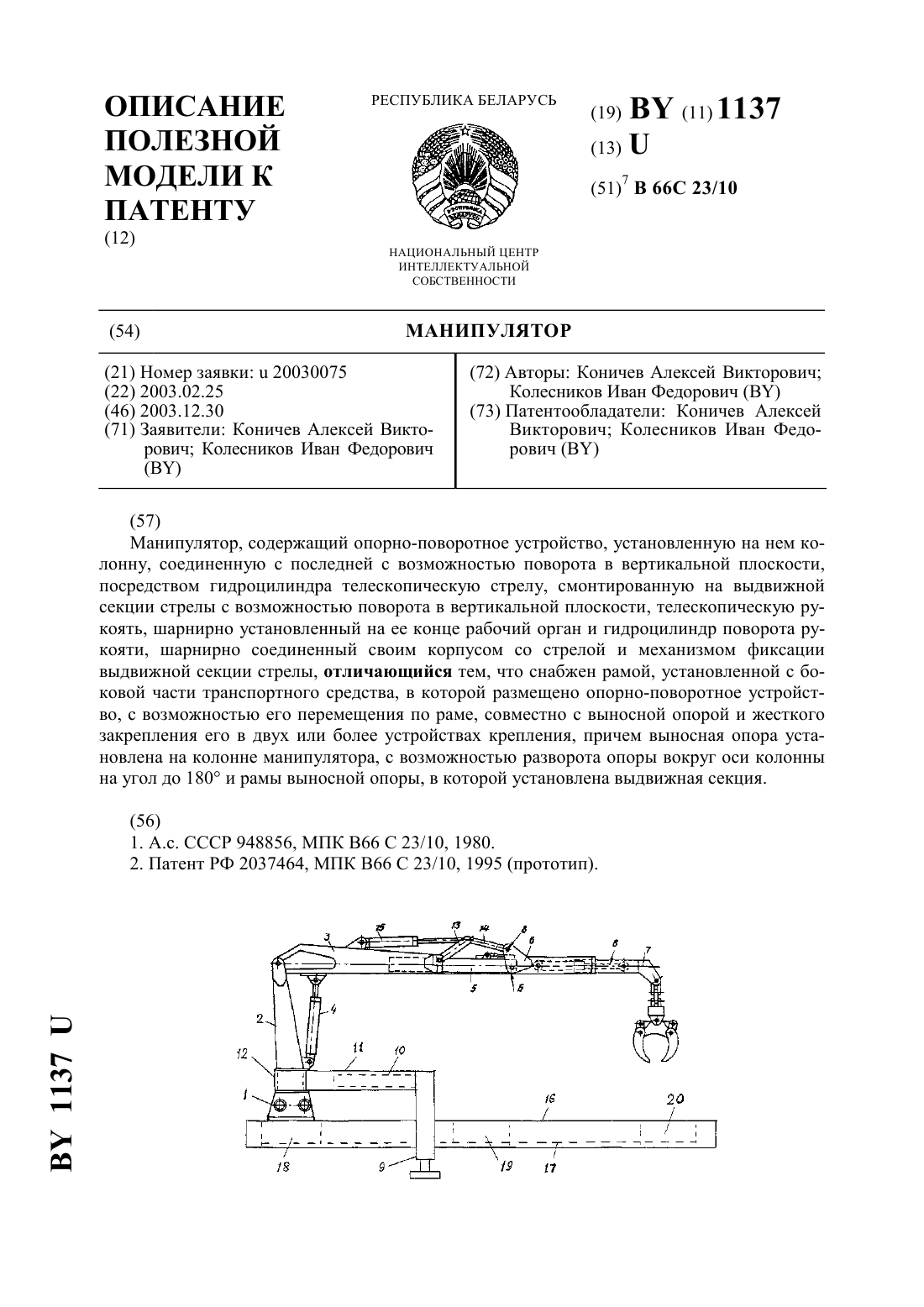
...установленную на нем колонну,соединенную с последней с возможностью поворота в вертикальной плоскости, посредством гидроцилиндра телескопическую стрелу, смонтированную на выдвижной секции стрелы с возможностью поворота в вертикальной плоскости, телескопическую рукоять,шарнирно установленный на ее конце рабочий орган и гидроцилиндр поворота рукояти,шарнирно соединенный своим корпусом со стрелой и механизмом фиксации выдвижной секции стрелы,...
Манипулятор

Номер патента: U 3066
Опубликовано: 30.10.2006
Авторы: Дашков Владимир Николаевич, Пунько Андрей Иванович, Китиков Вадим Олегович, Сорокин Эдуард Петрович
МПК: A01J 7/00
Метки: манипулятор
Текст:
...повышение скорости молокоотдачи, а также надежности работы доильной установки за счет упрощения конструкции манипулятора, исключение необходимости процесса додоя коровы. Указанный технический результат достигается тем, что в манипуляторе, содержащим доильный аппарат, пневмоцилиндр снятия доильного аппарата с гибкой связью, водило,которое свободно посажено одним концом во внутреннюю трубу и соединено с ней при помощи троса, перекинутого...
Манипулятор для автоматического снятия подвесной части доильного аппарата
Номер патента: U 381
Опубликовано: 30.12.2001
Авторы: Передня Владимир Иванович, Сорокин Эдуард Петрович, Китиков Вадим Олегович
МПК: A01J 7/00
Метки: автоматического, манипулятор, части, доильного, аппарата, снятия, подвесной
Текст:
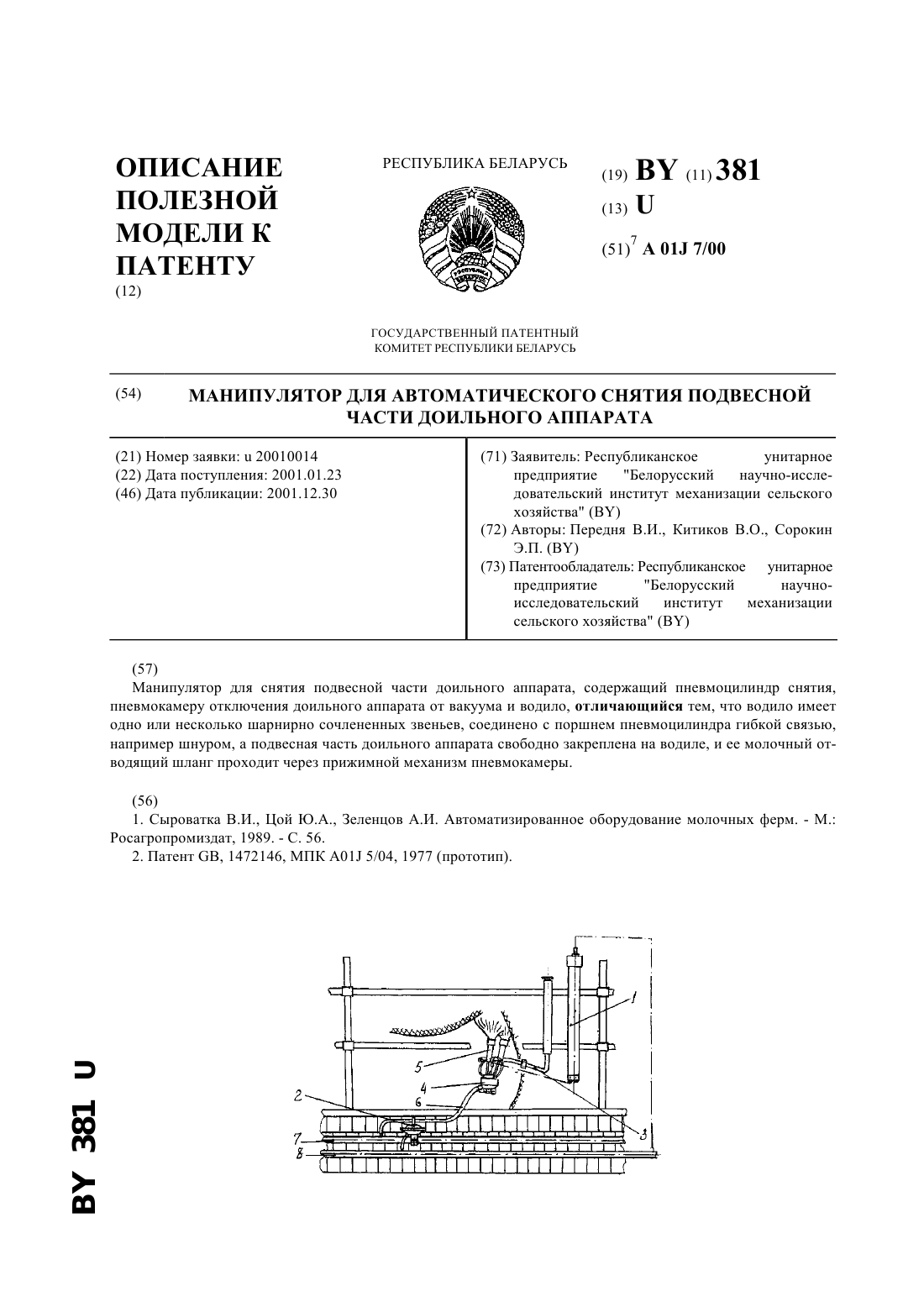
...(стягивания) подвесной части доильного аппарата. 2. Возможность падения и загрязнения доильных стаканов во время снятия вследствие незначительного нарушения регулировки манипулятора. Задачей полезной модели является ликвидация передачи болевызывающих усилий на соски вымени и исключение падения и загрязнения доильных стаканов во время их автоматического снятия. Указанный результат достигается тем, что манипулятор включает пневмоцилиндр...
Манипулятор
Номер патента: U 6028
Опубликовано: 28.02.2010
Авторы: Лосик Сергей Викторович, Китиков Вадим Олегович, Сорокин Эдуард Петрович
МПК: A01J 5/00
Метки: манипулятор
Текст:
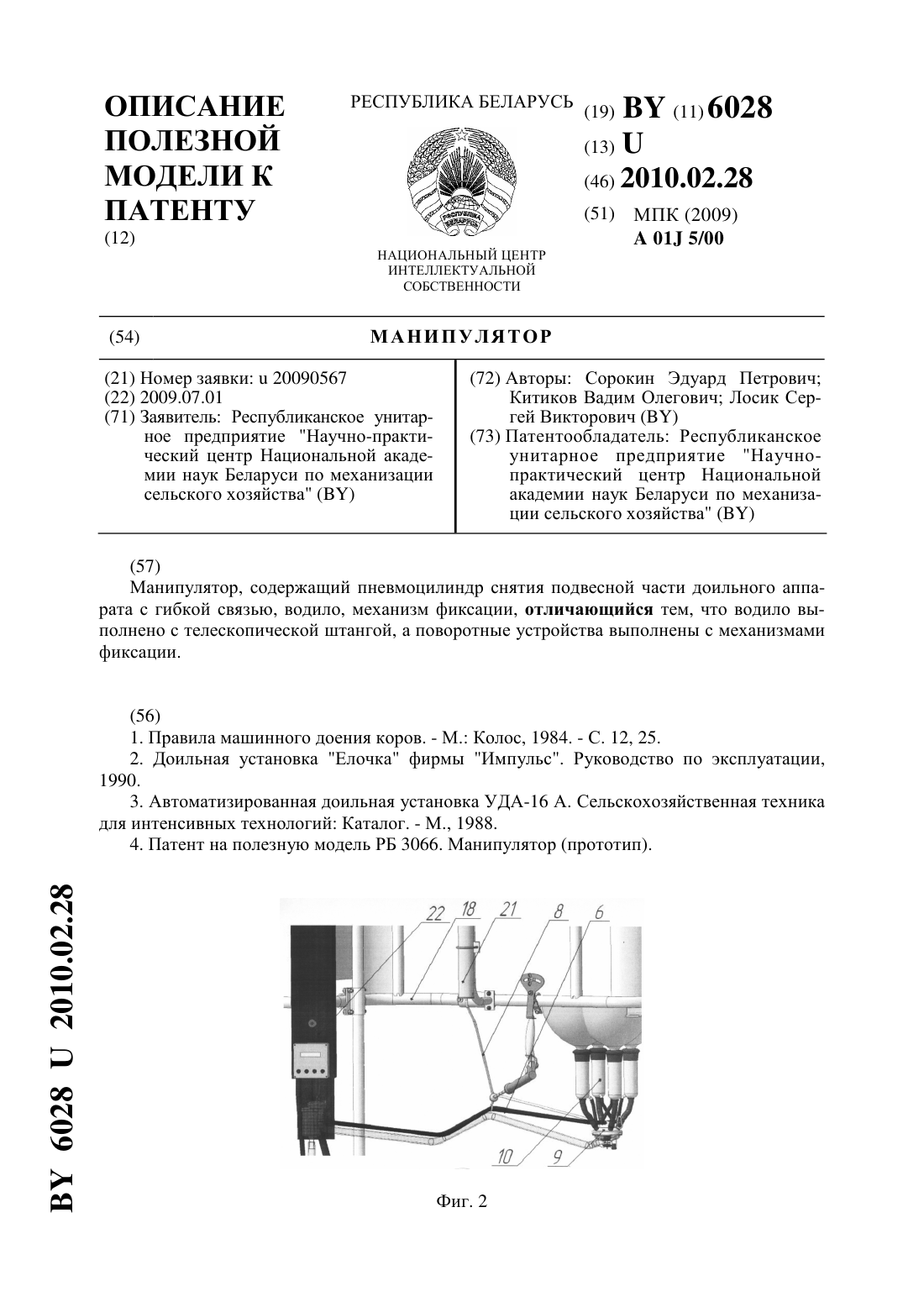
...доильного аппарата с гибкой связью, водило, механизм фиксации, водило выполнено с телескопической штангой, а поворотные устройства выполнены с механизмами фиксации. Телескопическая штанга с фиксирующими канавками, перемещаясь внутри водила,позволяет автоматически укорачивать длину манипулятора, поворотные устройства дают возможность регулировать положение манипулятора относительно вымени, а поворотные соединения - располагать манипулятор...
Манипулятор телеграфного ключа
Номер патента: U 3920
Опубликовано: 30.10.2007
Автор: Кузнецкий Дмитрий Анатольевич
МПК: H01H 21/00
Метки: телеграфного, манипулятор, ключа
Текст:
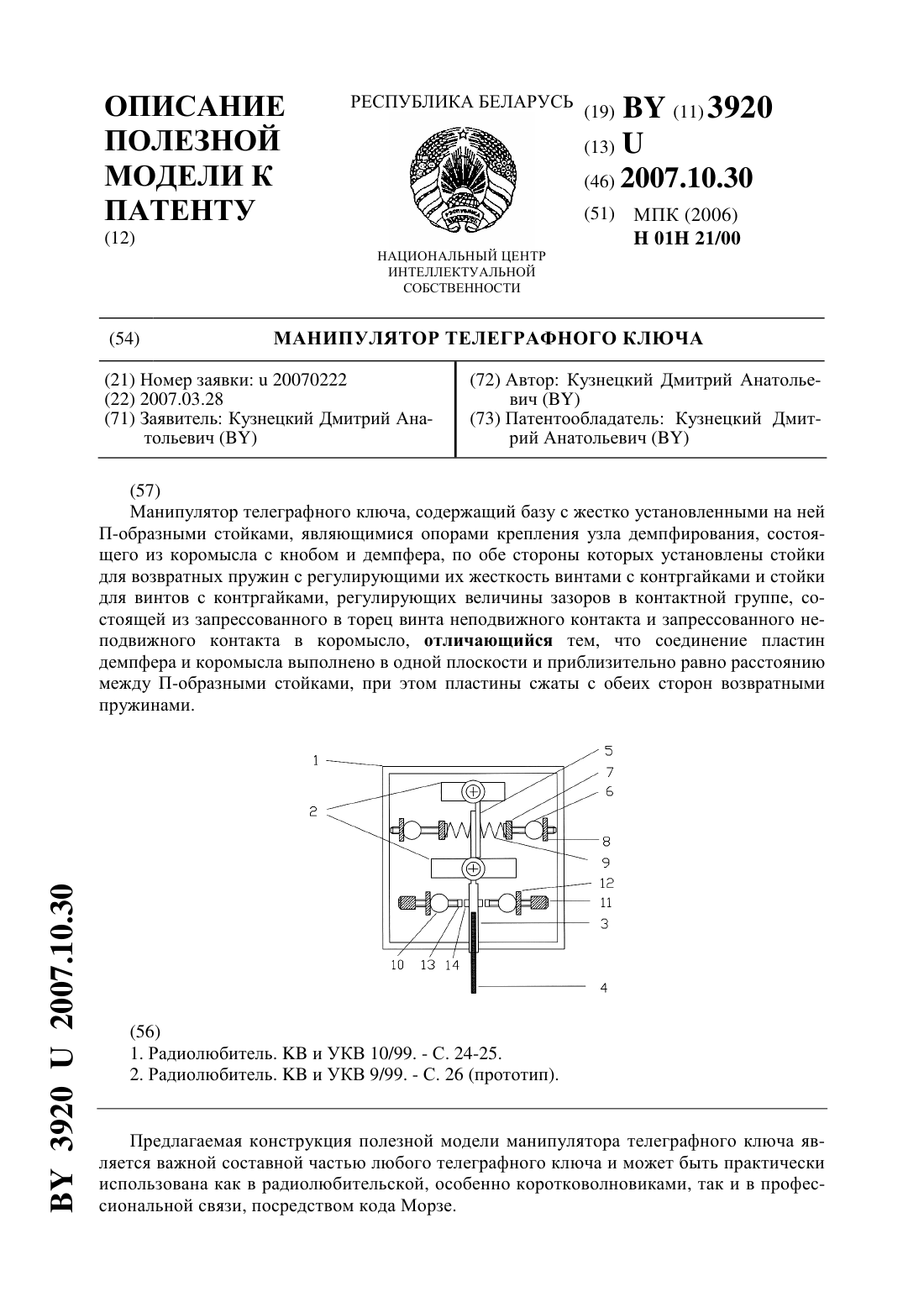
...пружин с регулирующими их жесткость винтами с контргайками и стойки для винтов с контргайками, регулирующих величины зазоров в контактной группе, состоящей из запрессованного в торец винта неподвижного контакта и запрессованного неподвижного контакта в коромысло. Согласно полезной модели, соединение пластин демпфера и коромысла выполнено в одной плоскости и приблизительно равно расстоянию между П-образными стойками, при этом пластины сжаты с...
Предыдущий патент: Центробежно-струйная форсунка
Следующий патент: Узел соединения пространственного каркаса из полых стержней
Случайный патент: Колесно-гусеничный движитель транспортного средства