Устройство для управления манипулятором
Номер патента: 7239
Опубликовано: 30.09.2005
Авторы: Дубовский Владимир Андреевич, Маньшин Геральд Григорьевич
Текст
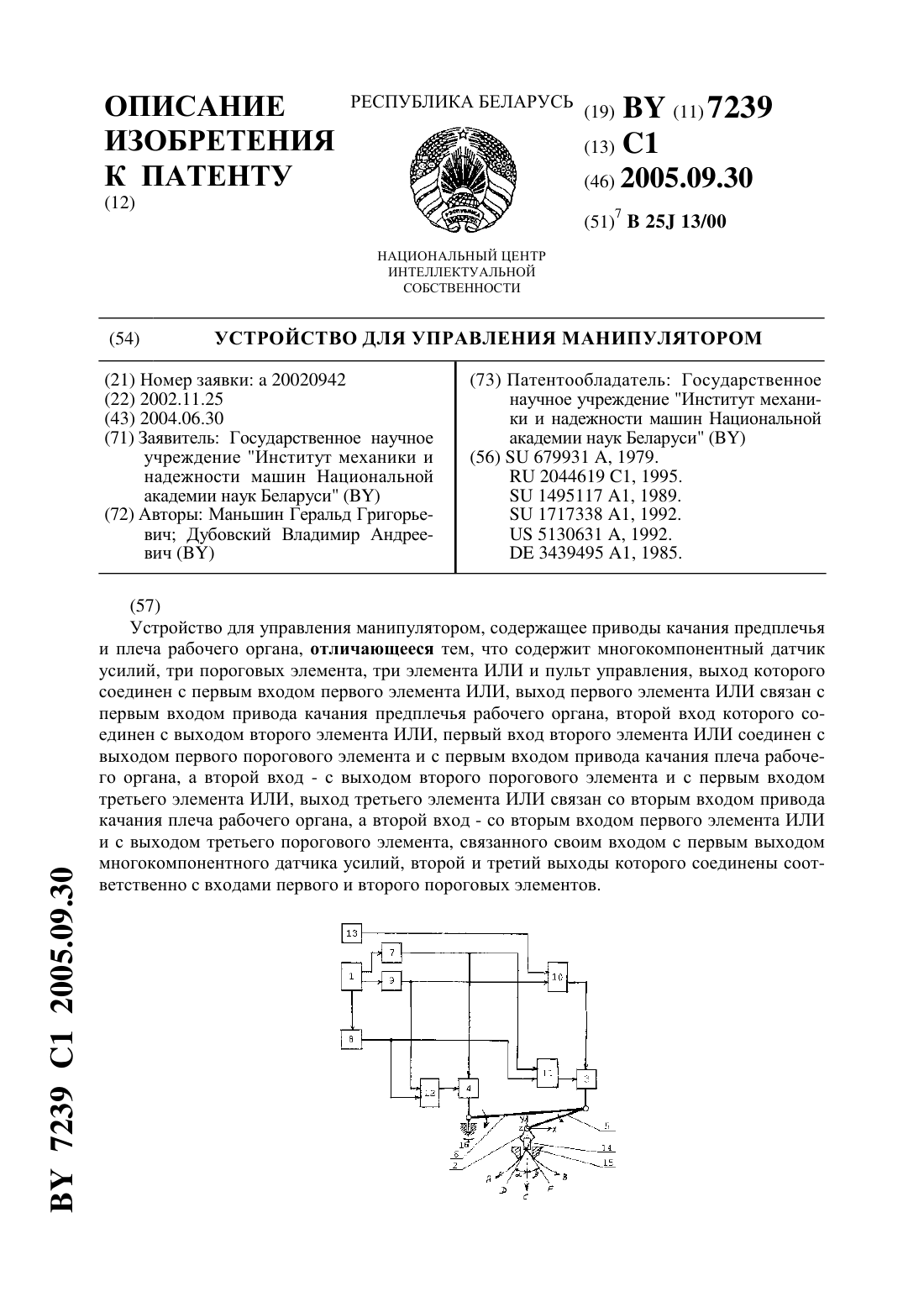
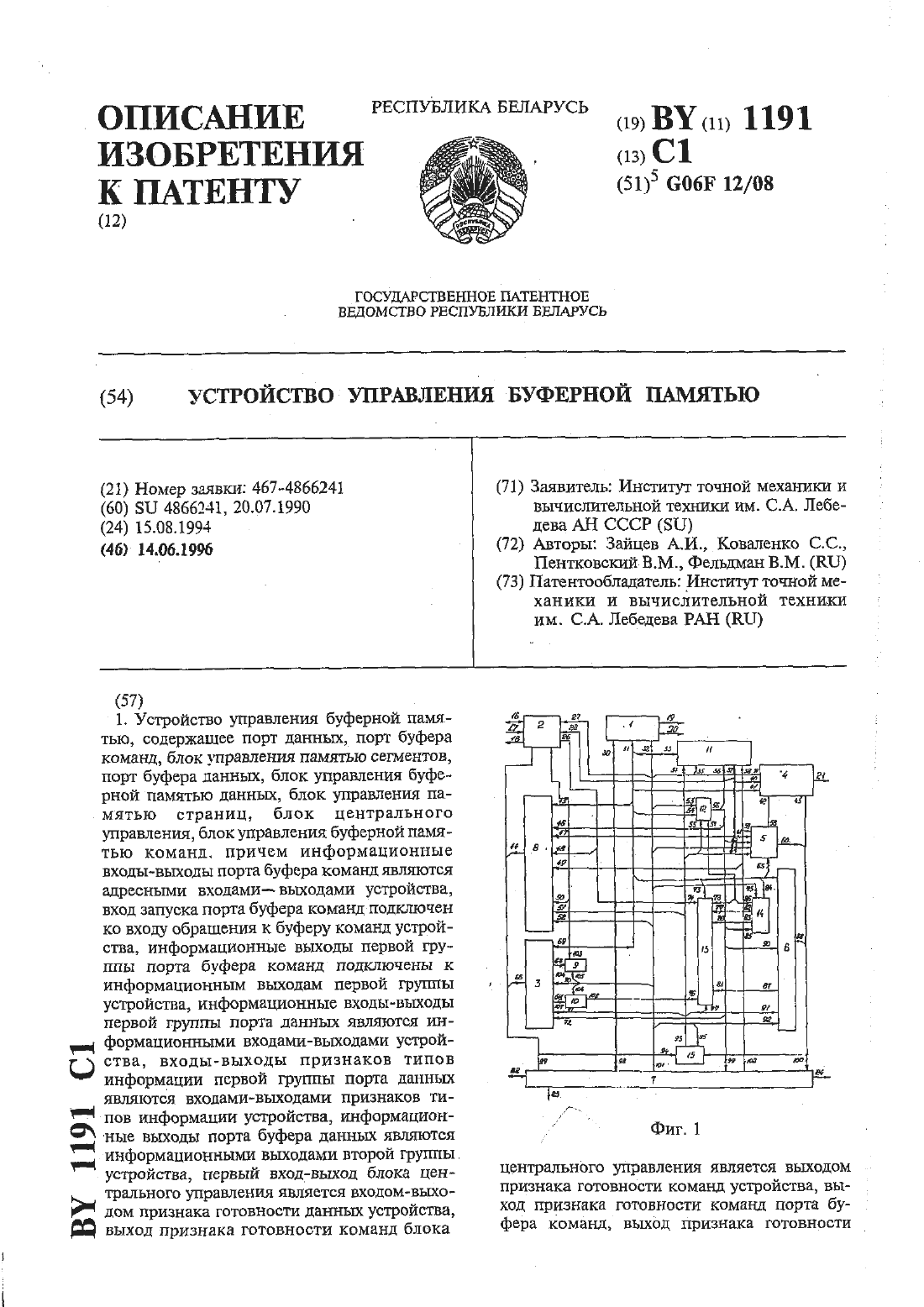
(51)25 13/00 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ(71) Заявитель Государственное научное учреждение Институт механики и надежности машин Национальной академии наук Беларуси(72) Авторы Маньшин Геральд Григорьевич Дубовский Владимир Андреевич(73) Патентообладатель Государственное научное учреждение Институт механики и надежности машин Национальной академии наук Беларуси(57) Устройство для управления манипулятором, содержащее приводы качания предплечья и плеча рабочего органа, отличающееся тем, что содержит многокомпонентный датчик усилий, три пороговых элемента, три элемента ИЛИ и пульт управления, выход которого соединен с первым входом первого элемента ИЛИ, выход первого элемента ИЛИ связан с первым входом привода качания предплечья рабочего органа, второй вход которого соединен с выходом второго элемента ИЛИ, первый вход второго элемента ИЛИ соединен с выходом первого порогового элемента и с первым входом привода качания плеча рабочего органа, а второй вход - с выходом второго порогового элемента и с первым входом третьего элемента ИЛИ, выход третьего элемента ИЛИ связан со вторым входом привода качания плеча рабочего органа, а второй вход - со вторым входом первого элемента ИЛИ и с выходом третьего порогового элемента, связанного своим входом с первым выходом многокомпонентного датчика усилий, второй и третий выходы которого соединены соответственно с входами первого и второго пороговых элементов. 7239 1 2005.09.30 Изобретение относится к машиностроению и может быть использовано для управления манипуляторами при сборке изделий. Известно вычислительное устройство для управления манипулятором, содержащее преобразователь полярных координат в декартовые, три функциональных преобразователя и пять сумматоров А.с. СССР 840801, МПК 25 15/00, 1981. Недостатком известного устройства является сложность программирования прямолинейного движения схвата манипулятора, что важно при его использовании в сборочных операциях. Наиболее близким по технической сущности к заявляемому изобретению является устройство для управления манипулятором, содержащее последовательно соединенные блок задания программы, первый сумматор и первый привод, связанный через звено качания предплечья рабочего органа с первым датчиком положения, выход которого подключен ко второму входу первого сумматора, последовательно соединенные второй сумматор и второй привод, связанный через звено качания плеча рабочего органа со вторым датчиком положения, выход которого подключен к первому входу второго сумматора, последовательно соединенные третий сумматор и третий привод, связанный через звено качания кисти рабочего органа с третьим датчиком положения, выход которого подключен к первому входу третьего сумматора, и вычислительный блок, вход которого соединен с выходом первого датчика положения, а выход - со вторыми входами второго и третьего сумматоров А.с. СССР 679931, МПК 05 11/00,25 13/00, 1979. Недостатком этого устройства является его низкая эффективность при управлении сборочными манипуляторами, так как оно не позволяет корректировать движения рабочего органа на основе информации о силовом взаимодействии соединяемых деталей. Задачей технического решения является обеспечение управления манипулятором по сигналам от многокомпонентного датчика усилий для повышения эффективности выполнения им сборочных операций. Решение задачи достигается в устройстве для управления манипулятором, содержащем приводы качания предплечья и плеча рабочего органа тем, что, согласно изобретению, оно содержит многокомпонентный датчик усилий, три пороговых элемента, три элемента ИЛИ и пульт управления, выход которого соединен с первым входом первого элемента ИЛИ, выход первого элемента ИЛИ связан с первым входом привода качания предплечья рабочего органа,второй вход которого соединен с выходом второго элемента ИЛИ, первый вход второго элемента ИЛИ соединен с выходом первого порогового элемента и с первым входом привода качания плеча рабочего органа, а второй вход - с выходом второго порогового элемента и с первым входом третьего элемента ИЛИ, выход третьего элемента ИЛИ связан со вторым входом привода качания плеча рабочего органа, а второй вход - со вторым входом первого элемента ИЛИ и с выходом третьего порогового элемента, связанного своим входом с первым выходом многокомпонентного датчика усилий, второй и третий выходы которого соединены соответственно с входами первого и второго пороговых элементов. На чертеже представлена функциональная схема устройства для управления манипулятором при сборке изделий. Устройство содержит многокомпонентный датчик 1 усилий, установленный в рабочем органе 2, приводы 3 и 4 качания предплечья 5 и плеча 6 соответственно, первый, второй и третий пороговые элементы 7, 8 и 9 соответственно, первый, второй и третий элементы 10, 11 и 12 ИЛИ соответственно и пульт 13 управления, причем рабочий орган 2 связан с валом 14, вставляемым во втулку 15, а плечо 6 манипулятора имеет возможность поворота вокруг вертикальной оси 16. Кроме того, обозначено А и В - траектории движения торца вала 14 при управлении звеньями 6 и 5 соответственно С - направление движения вала 14 и- касательные к траекториям А и В соответственно в точке их пересечения на торце вала 14,иуглы пересечения касательныхисоответственно с линией С. 7239 1 2005.09.30 Многокомпонентный датчик 1 усилий измеряет усилия, действующие на вал 14 со стороны втулки 15 вдоль координатных осей х и у, связанных с рабочим органом 2, и может быть установлен между рабочим органом 2 и предплечьем 5. На его первом выходе,связанном с пороговым элементом 9, формируется сигнал, соответствующий положительной компоненте силы, действующей на вал 14 вдоль оси х. На втором выходе, связанном с пороговым элементом 7, формируется сигнал, соответствующий отрицательной компоненте силы вдоль оси х. На третьем выходе, связанном с пороговым элементом 8, формируется сигнал, соответствующий положительной компоненте силы вдоль оси у. Перед выполнением сборочной операции, например сборки узла вал-втулка, вал 14 находится в рабочем органе 2 манипулятора, а втулка 15 закреплена неподвижно на позиции сборки. Перед вводом вала 14 в отверстие втулки 15 рабочий орган 2 выводят в такое положение, при котором углыиблизки друг к другу. При этом плечо 6 манипулятора имеет возможность свободно поворачиваться вокруг вертикальной оси 16 в пределах малого угла, соизмеримого с погрешностью позиционирования манипулятора. На выходах датчика 1 сигналы равны нулю, и приводы 3 и 4 отключены. Работа устройства осуществляется следующим образом. С пульта управления 13 через элемент 10 ИЛИ подается единичный импульсный сигнал на включение привода 3 перемещения предплечья 5. Последнее начинает вращаться против часовой стрелки, при этом торец вала 14 движется по траектории В. При контакте вала 14 с втулкой 15 на первый действует отрицательная сила вдоль оси х. При этом на выходе датчика 1, связанном с пороговым элементом 7, появляется сигнал, при достижении которым заданного значения срабатывает пороговый элемент 7, единичный сигнал с выхода которого отключает привод 3 и включает привод 4. Предплечье 5 останавливается, а плечо 6 начинает вращаться по часовой стрелке при этом вал 14 перемещается по траектории А к противоположной стенке отверстия втулки 15 и одновременно вглубь отверстия. При этом на выходе датчика 1, связанном с пороговым элементом 7, сигнал уменьшается до нуля, и при контакте вала 14 с противоположной стенкой отверстия втулки 15 на выходе датчика 1, связанном с пороговым элементом 9, появляется сигнал (т.к. на вал 14 теперь действует положительная компонента силы вдоль оси х), при достижении которым некоторого заданного значения срабатывает пороговый элемент 9, единичный сигнал с выхода которого отключает привод 4 и включает привод 3. В последующем работа устройства повторяется, в результате чего совершается колебательное движение вала 14 между противоположными стенками отверстия втулки 15 с одновременным его перемещением вдоль линии С. При этом погрешность позиционирования манипулятора вдоль осикомпенсируется свободным поворотом плеча 6 вокруг вертикальной оси 16 под действием силы вдоль оси , возникающей при соединении деталей. Такое движение вала 14 совершается до тех пор, пока он не достигнет упора, что означает завершение процесса сборки. При этом на вал 14 действует сила вдоль оси у, и на третьем выходе датчика 1, связанном с пороговым элементом 8, появляется соответствующий сигнал. При определенном значении указанной силы срабатывает пороговый элемент 8, единичный сигнал с выхода которого через элементы 11 и 12 ИЛИ отключает приводы 3 и 4, и рабочий орган 2 манипулятора останавливается. Использование предлагаемого устройства по сравнению с известным устройством повышает эффективность выполнения манипулятором сборочных операций, так как позволяет управлять им на основе информации о силовом взаимодействии соединяемых деталей. При этом в процессе сборки рабочий орган сообщает валу как линейные, так и угловые колебательные движения относительно оси отверстия втулки, что снижает вероятность заклинивания вала во втулке, а это повышает, в свою очередь, надежность и производительность сборочных процессов. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20 3
МПК / Метки
МПК: B25J 13/00
Метки: управления, устройство, манипулятором
Код ссылки
<a href="https://by.patents.su/3-7239-ustrojjstvo-dlya-upravleniya-manipulyatorom.html" rel="bookmark" title="База патентов Беларуси">Устройство для управления манипулятором</a>
Устройство числового программного управления
Номер патента: 5128
Опубликовано: 30.06.2003
Авторы: Каштальян Иван Алексеевич, Пархутик Алексей Петрович, Резниченко Владимир Иванович
МПК: G05B 19/18, G05B 19/416
Метки: устройство, управления, числового, программного
Текст:
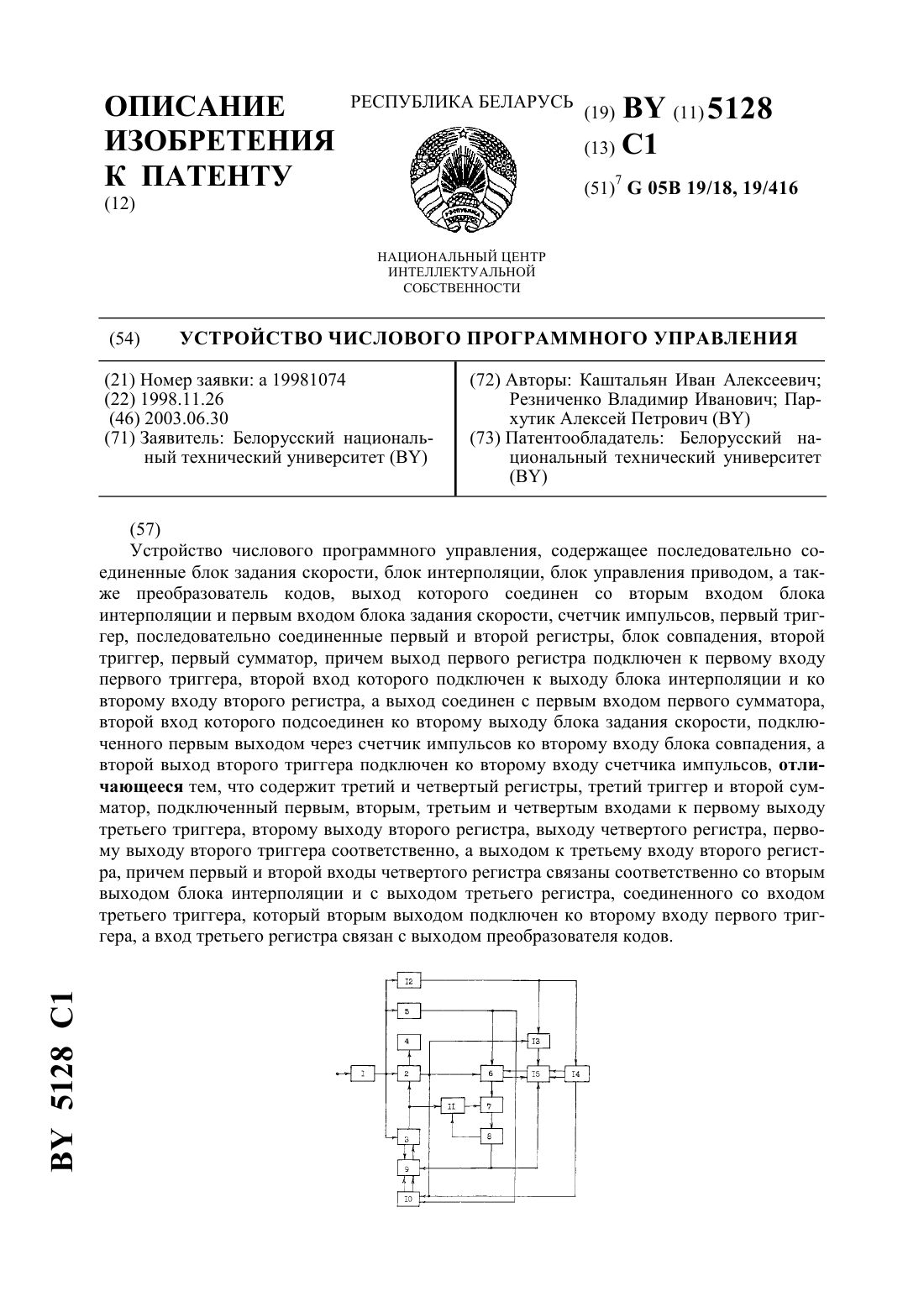
...введены третий и четвертый регистры, третий триггер и второй сумматор, подключенный первым, вторым, третьим и четвертым входами к первому выходу третьего триггера, второму выходу второго регистра, выходу четвертого регистра,2 5128 1 первому выходу второго триггера соответственно, а выходом к третьему входу второго регистра, причем первый и второй входы четвертого регистра связаны соответственно со вторым выходом блока интерполяции и с...
Устройство управления буферной памятью
Номер патента: 1191
Опубликовано: 14.06.1996
Авторы: Фельдман Владимир Марткович, Коваленко Сергей Саввич, Пентковский Владимир Мстиславович, Зайцев Александр Иванович
МПК: G06F 12/08
Метки: буферной, управления, памятью, устройство
Текст:
...второго мультиплексора адреса подключены к адресным входам второй группы соответственно первого, второго, третьего и четвертого узлов памяти адресных признаков и адресному входу второго мультиплексора данных, выход формирователя признаков значимости подключен к адресным входам третьейгруппы первого, второго, третьего и четвертого узлов памяти адресных признаков, выход мультигшексора данных признаков старения соединен с информационным входом...
Способ управления манипулятором промышленного робота
Номер патента: 2020
Опубликовано: 30.03.1998
Авторы: Филонов Игорь Павлович, Курч Леонид Витальевич, Герасимов Юрий Борисович, Черкас Александр Адамович
МПК: B25J 9/16, B25J 11/00
Метки: промышленного, робота, управления, манипулятором, способ
Текст:
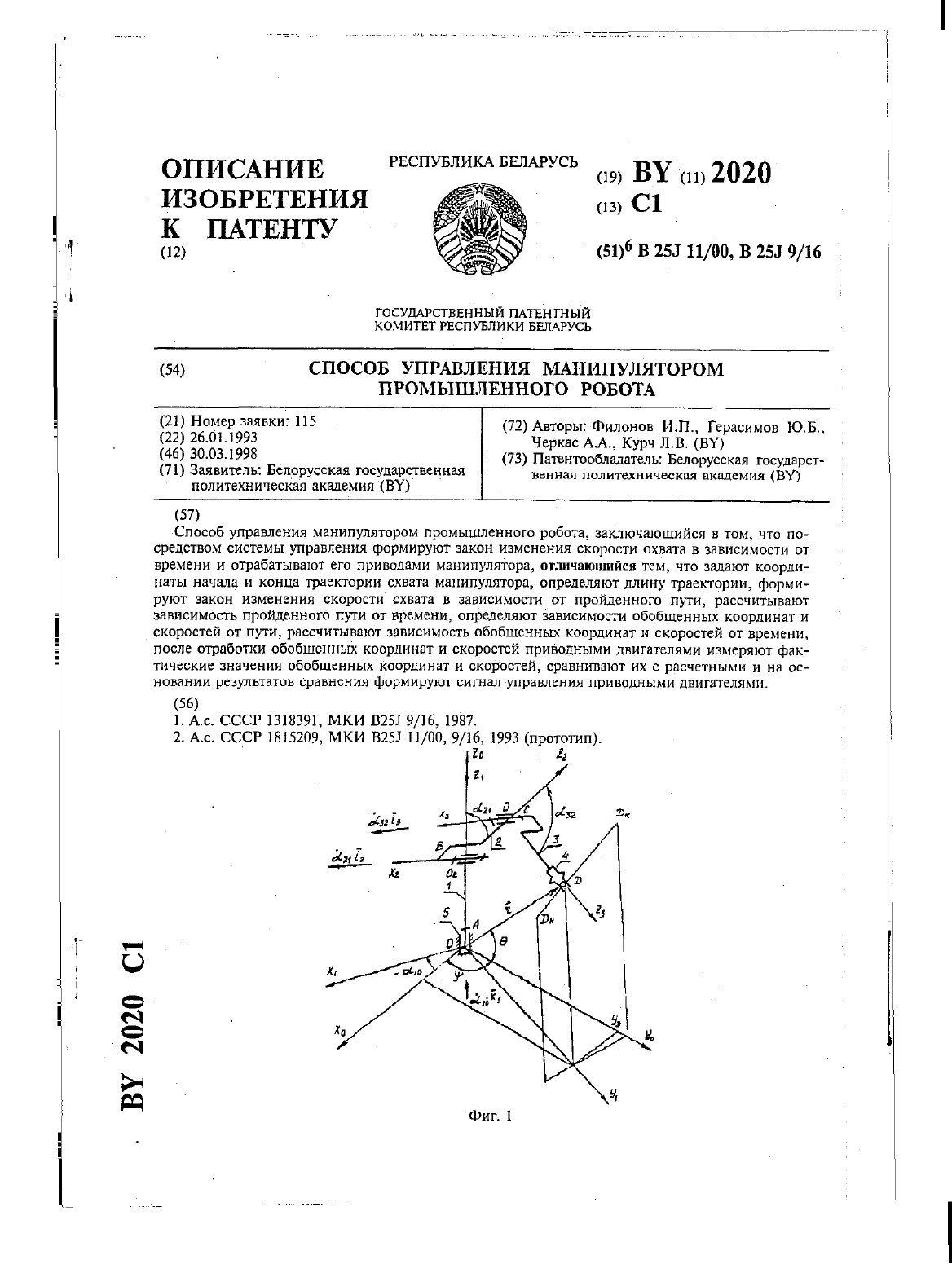
...от времени фиг.17, 18, 19 - представлены законы изменения обобщенных скоростей от времени на фиг.20 - представлена блок-схема системы управления по обобщенной координате и скорости.Предложенный способ управления манипулятором может быть реализован, например, манипулятором, схема которого представлена на фиг.1. Манипулятор содержит подвижные звенья 1, 2, 3, и схват 4, установленный неподвижно на звене 3, станину 5, а также перемещаемую...
Устройство числового программного управления
Номер патента: 5129
Опубликовано: 30.06.2003
Авторы: Романчук Сергей Иванович, Резниченко Владимир Иванович, Каштальян Иван Алексеевич
МПК: G05B 19/18, G05B 19/416
Метки: устройство, программного, числового, управления
Текст:
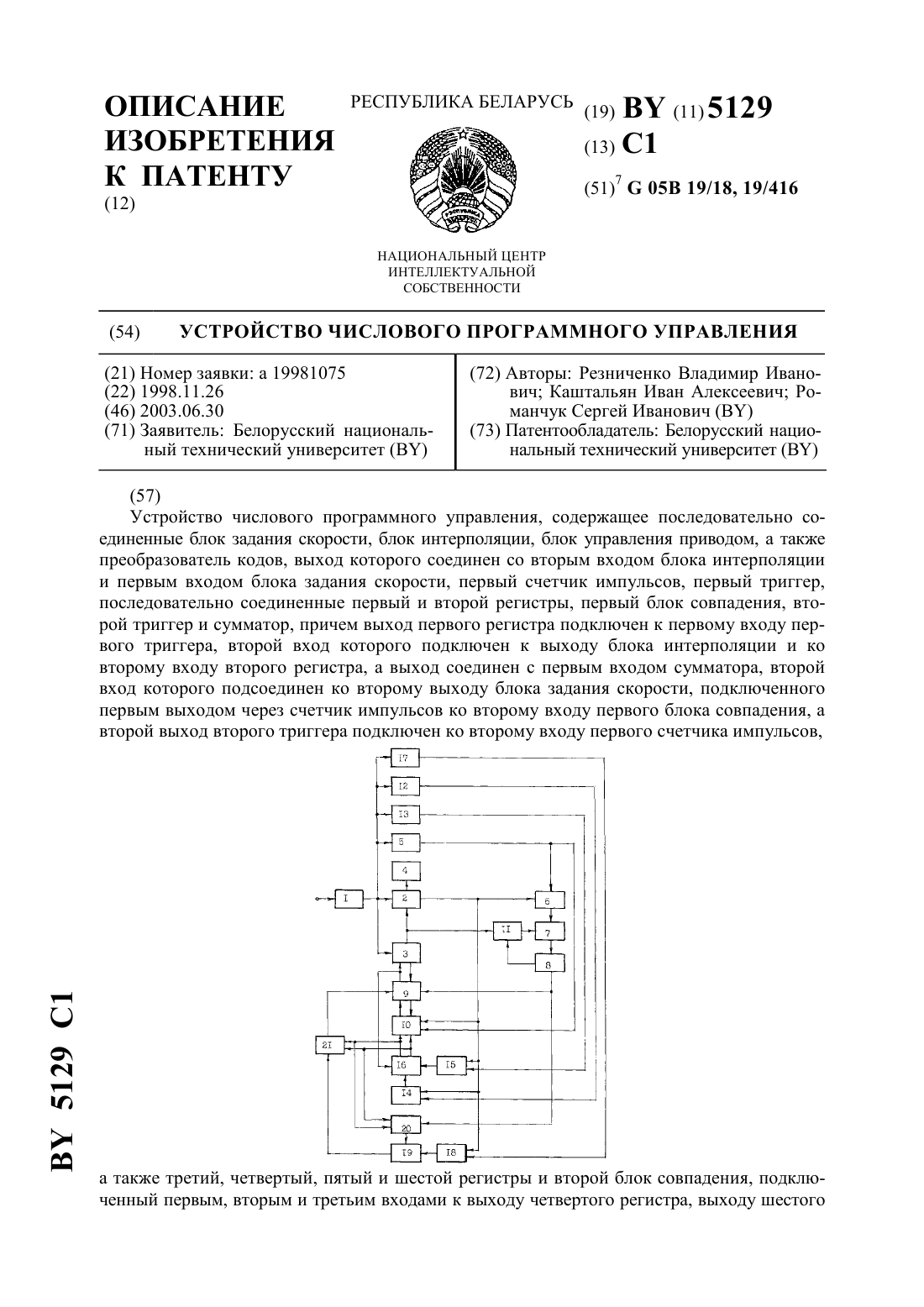
...совпадения соответственно, а также с первым и вторым входами второго счетчика, подключенного третьим входом к первому выходу второго триггера, а выход третьего триггера подключен к четвертому входу сумматора, причем первый вход восьмого регистра связан с выходом блока интерполяции, а второй вход с выходом седьмого регистра, соединенного входом с выходом преобразователя кодов. На чертеже представлена блок-схема устройства. Устройство...
Способ управления манипулятором промышленного робота

Номер патента: 4972
Опубликовано: 30.03.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: управления, робота, промышленного, манипулятором, способ
Текст:
...схема манипулятора с шестью степенями подвижности фиг. 3 представлены зависимости скорости, аналога скорости, ускорения схвата и обобщенных ускорений звеньев манипулятора от пути фиг. 4 представлена блок-схема алгоритма управления манипулятором. 3 4972 1 Блок-схема системы управления манипулятором промышленного робота представлена на фиг. 1. На фиг. 1 обозначены 1 - система управления, 2 - контроллеры приводов, 3 робот и 4 - модуль...
Предыдущий патент: Способ брикетирования металлической стружки
Следующий патент: Легкоплавкое стекло
Случайный патент: Опора роботизированного стационарного пожарного комплекса