Датчик проскальзывания
Номер патента: U 8540
Опубликовано: 30.08.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
Текст
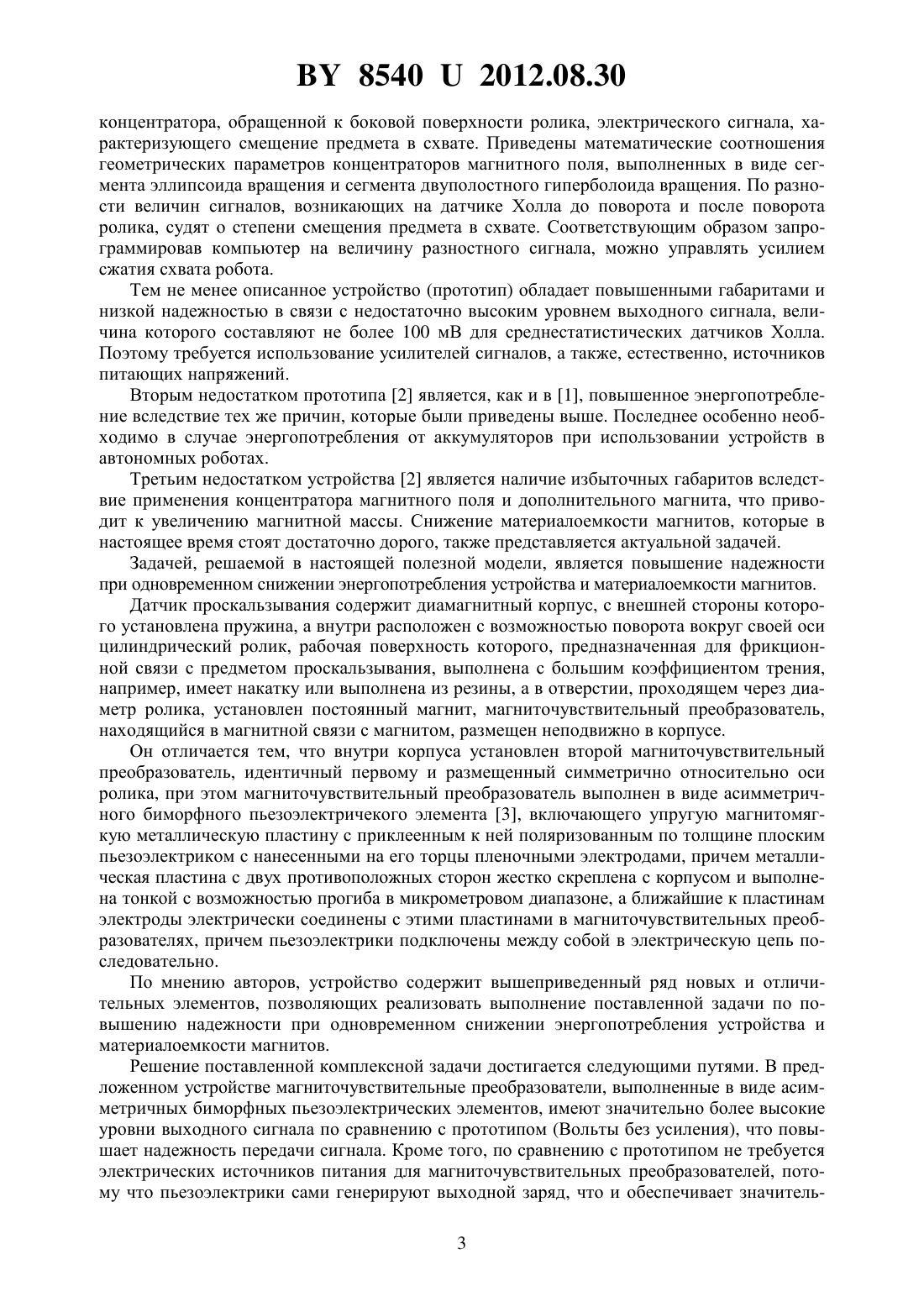
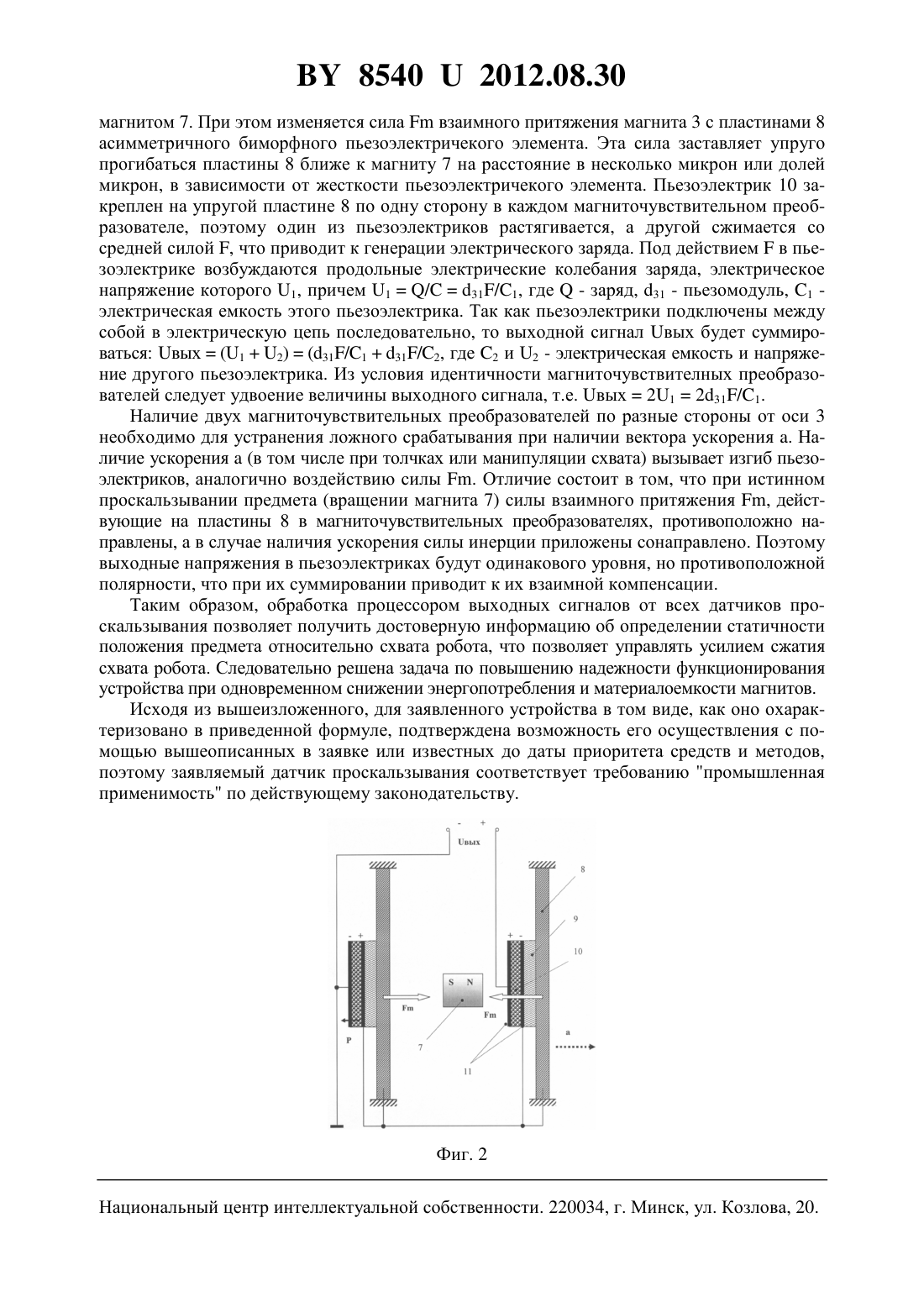
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский государственный университет(72) Авторы Анищик Виктор Михайлович Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) Датчик проскальзывания, содержащий диамагнитный корпус, с внешней стороны которого установлена пружина, а внутри расположен с возможностью поворота вокруг своей оси цилиндрический ролик, рабочая поверхность которого, предназначенная для фрикционной связи с предметом проскальзывания, выполнена с большим коэффициентом трения,например, имеет накатку или выполнена из резины, а в отверстии, проходящем через диаметр ролика, установлен постоянный магнит, магниточувствительный преобразователь, находящийся в магнитной связи с магнитом, размещен неподвижно в корпусе, отличающийся тем, что внутри корпуса установлен второй магниточувствительный преобразователь,идентичный первому и размещенный симметрично относительно оси ролика, при этом магниточувствительный преобразователь выполнен в виде асимметричного биморфного пьезоэлектричекого элемента, включающего упругую магнитомягкую металлическую пластину с приклеенным к ней поляризованным по толщине плоским пьезоэлектриком с нанесенными на его торцы пленочными электродами, причем металлическая пластина с двух противоположных сторон жестко скреплена с корпусом и выполнена тонкой с возможностью прогиба в микрометровом диапазоне, а ближайшие к пластинам электроды электрически соединены с этими пластинами в магниточувствительных преобразователях,причем пьезоэлектрики подключены между собой в электрическую цепь последовательно.(56) 1. А.с. СССР 1415856, МПК 01 В 7/00. Прецизионный датчик проскальзывания / Л.А.Андарало, В.И.Прокошин, В.Г.Шепелевич, В.А.Ярмолович. Заявитель Белорусский государственный университет. 2. А.с. СССР 1546833, МПК 01 7/00 25 15/02 / Л.А.Андарало, А.И.Демченко,В.И.Прокошин, В.Г.Шепелевич, В.А.Ярмолович // Бюл.8. - опубл. 28.02.1990. Датчик,регистрирующий скольжение предмета. Заявитель Белорусский государственный университет им. В.И. Ленина (прототип). 3. Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезоэлектрические датчики / Под ред. В.М. Шарапова. - Москва Техносфера, 2006. - С. 297. Заявляемая полезная модель относится к робототехнике и может быть использована для контроля проскальзывания предмета, зажатого в схвате робота, с целью управления усилием сжатия преимущественного автономного робота. Известен прецизионный датчик проскальзывания 1, функционирующий на эффекте Холла. Он содержит цилиндрический ролик, цилиндрическая поверхность которого, предназначенная для фрикционной связи с предметом проскальзывания, выполнена с большим коэффициентом трения, например, имеет накатку или выполнена из резины. Ролик выполнен из ферромагнитной и неферромагнитной частей, имеющих в сечении, проходящем через ось ролика, вид прямоугольных треугольников. Ролик расположен в зазоре между полюсами магнитопровода, выполненного в виде С-образного магнита. В зазоре между одним из полюсов магнита и торцом цилиндрического ролика размещен магниточувствительный преобразователь, например датчик Холла, с помощью которого контролируется угловое положение ролика, зависящее от величины проскальзывания. Для увеличения чувствительности высота ролика может быть равна его диаметру. При вращении (повороте) ролика происходит изменение магнитного сопротивления расположенного в зазоре Собразного магнита - участка ролика, благодаря чему обеспечивается близкая к гармонической функция преобразования углового положения ролика в электрический сигнал. Это устройство обладает повышенными габаритами и низкой надежностью в связи с недостаточно высоким уровнем выходного сигнала, величина которого составляет обычно десятки милливольт для среднестатистических датчиков Холла (а не Вольты). Поэтому требуется использование усилителя сигнала. Вторым недостатком устройства является достаточно высокое энергопотребление,связанное с тем, что датчик Холла должен постоянно запитываться током величиной(10-30) мА, что приводит к значительному энергопотреблению. Отсутствие механизма контролируемого сжатия датчика при соприкосновении с предметом проскальзывания может вызвать изгиб оси вращения цилиндрического ролика или даже его поломку, что дополнительно снижает надежность устройства в целом. Наиболее близким по технической реализации к предлагаемому решению является датчик, регистрирующий скольжение предмета, приведенный в 2 (прототип). Датчики от одного до четырех в зависимости от конструкции схвата и манипуляций, проводимых роботом с предметом, устанавливаются в соответствующих плоскостях схвата и содержат пружину, обеспечивающую контролируемую силу прижатия датчика к искомому предмету,исключающую поломку ролика вращения, вследствие перемещения (утопления) всего корпуса датчика заподлицо рабочей поверхности схвата. Датчик, регистрирующий скольжение предмета, содержит корпус, в котором расположен с возможностью поворота вокруг своей оси цилиндрический ролик, и магнитную систему, выполненную в виде двух постоянных магнитов, один из которых установлен в отверстии ролика, проходящем через один из его диаметров, а другой неподвижно закреплен на корпусе и снабжен концентратором магнитного поля. При скольжении в схвате робота предмет поворачивает ролик датчика, что вызывает появление в преобразователе Холла, расположенном на вершине 2 85402012.08.30 концентратора, обращенной к боковой поверхности ролика, электрического сигнала, характеризующего смещение предмета в схвате. Приведены математические соотношения геометрических параметров концентраторов магнитного поля, выполненных в виде сегмента эллипсоида вращения и сегмента двуполостного гиперболоида вращения. По разности величин сигналов, возникающих на датчике Холла до поворота и после поворота ролика, судят о степени смещения предмета в схвате. Соответствующим образом запрограммировав компьютер на величину разностного сигнала, можно управлять усилием сжатия схвата робота. Тем не менее описанное устройство (прототип) обладает повышенными габаритами и низкой надежностью в связи с недостаточно высоким уровнем выходного сигнала, величина которого составляют не более 100 мВ для среднестатистических датчиков Холла. Поэтому требуется использование усилителей сигналов, а также, естественно, источников питающих напряжений. Вторым недостатком прототипа 2 является, как и в 1, повышенное энергопотребление вследствие тех же причин, которые были приведены выше. Последнее особенно необходимо в случае энергопотребления от аккумуляторов при использовании устройств в автономных роботах. Третьим недостатком устройства 2 является наличие избыточных габаритов вследствие применения концентратора магнитного поля и дополнительного магнита, что приводит к увеличению магнитной массы. Снижение материалоемкости магнитов, которые в настоящее время стоят достаточно дорого, также представляется актуальной задачей. Задачей, решаемой в настоящей полезной модели, является повышение надежности при одновременном снижении энергопотребления устройства и материалоемкости магнитов. Датчик проскальзывания содержит диамагнитный корпус, с внешней стороны которого установлена пружина, а внутри расположен с возможностью поворота вокруг своей оси цилиндрический ролик, рабочая поверхность которого, предназначенная для фрикционной связи с предметом проскальзывания, выполнена с большим коэффициентом трения,например, имеет накатку или выполнена из резины, а в отверстии, проходящем через диаметр ролика, установлен постоянный магнит, магниточувствительный преобразователь,находящийся в магнитной связи с магнитом, размещен неподвижно в корпусе. Он отличается тем, что внутри корпуса установлен второй магниточувствительный преобразователь, идентичный первому и размещенный симметрично относительно оси ролика, при этом магниточувствительный преобразователь выполнен в виде асимметричного биморфного пьезоэлектричекого элемента 3, включающего упругую магнитомягкую металлическую пластину с приклеенным к ней поляризованным по толщине плоским пьезоэлектриком с нанесенными на его торцы пленочными электродами, причем металлическая пластина с двух противоположных сторон жестко скреплена с корпусом и выполнена тонкой с возможностью прогиба в микрометровом диапазоне, а ближайшие к пластинам электроды электрически соединены с этими пластинами в магниточувствительных преобразователях, причем пьезоэлектрики подключены между собой в электрическую цепь последовательно. По мнению авторов, устройство содержит вышеприведенный ряд новых и отличительных элементов, позволяющих реализовать выполнение поставленной задачи по повышению надежности при одновременном снижении энергопотребления устройства и материалоемкости магнитов. Решение поставленной комплексной задачи достигается следующими путями. В предложенном устройстве магниточувствительные преобразователи, выполненные в виде асимметричных биморфных пьезоэлектрических элементов, имеют значительно более высокие уровни выходного сигнала по сравнению с прототипом (Вольты без усиления), что повышает надежность передачи сигнала. Кроме того, по сравнению с прототипом не требуется электрических источников питания для магниточувствительных преобразователей, потому что пьезоэлектрики сами генерируют выходной заряд, что и обеспечивает значитель 3 85402012.08.30 ное снижение энергопотребления устройства в целом. Исключение из конструкции 2 магнита с концентратором магнитного поля повышает эффективность использования магнитной массы и приводит к снижению материалоемкости магнитов. Соединение в электрическую цепь пьезоэлектриков последовательно друг с другом обеспечивает компенсацию воздействия внешних помех, вызванных силами инерции, например, таких как ускорения и толчки. Проведенный анализ уровня техники позволил установить, что заявителем не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемого устройства, а выделение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле полезной модели. Таким образом, комплексный анализ изложенных отличительных признаков конструкции датчика проскальзывания показывает, что они являются существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых в совокупности обеспечивают решение поставленной комплексной задачи в заявляемой полезной модели, следовательно, можно сделать вывод о соответствии заявляемого датчика проскальзывания условию патентоспособности новизна. Заявляемая полезная модель поясняется фиг. 1-2. На фиг. 1 изображено устройство в разрезе перпендикулярно оси вращения ролика. На фиг. 2 представлен вариант электрической схемы подключения электродов асимметричных биморфных пьезоэлектрических элементов (вых - выходной сигнала,- вектор поляризации пьезоэлектриков,- вектор ускорения). Датчик проскальзывания содержит диамагнитный корпус 1, с внешней стороны которого установлена пружина 2, а внутри расположен с возможностью поворота вокруг своей оси 3 цилиндрический ролик 4, рабочая поверхность 5 которого, предназначенная для фрикционной связи с предметом проскальзывания (не изображен), выполнена с большим коэффициентом трения, например, имеет накатку или выполнена из резины, а в отверстии 6,проходящем через диаметр ролика 4, установлен постоянный магнит 7, два идентичных магниточувтвительных преобразователя, находящихся в магнитной связи с магнитом 7,размещены симметрично относительно оси ролика 3 неподвижно в корпусе 1. При этом каждый магниточувствительный преобразователь выполнен в виде асимметричного биморфного пьезоэлектричекого элемента, включающего упругую магнитомягкую металлическую пластину 8 с приклеенным к ней (обычно тонким слоем клея 9) поляризованным по толщине ( - вектор поляризации) плоским пьезоэлектриком 10 с нанесенными на его торцы пленочными электродами 11, причем металлическая пластина 8 с двух противоположных сторон жестко скреплена с корпусом 1 и выполнена тонкой с возможностью прогиба в микрометровом диапазоне. Ближайшие к пластинам 8 электроды 11 электрически соединены с этими пластинами в магниточувствительных преобразователях, причем пьезоэлектрики подключены между собой в электрическую цепь последовательно, как представлено на фиг. 2. Вся конструкция датчика проскальзывания вставляется в схват 12 робота. Датчики проскальзывания (обычно до четырех) устанавливаются в схвате 12 в зависимости от конструкции схвата и манипуляций, проводимых роботом. Датчики проскальзывания устанавливаются в соответствующих плоскостях схвата, причем пружина 2 обеспечивает контролируемую силу прижатия корпуса 1 к искомому предмету, который может проскальзывать. Пружина 2 исключает поломку ролика вращения вследствие перемещения (утапливания) всего корпуса 1 датчика заподлицо рабочей поверхности схвата 12. Устройство работает следующим образом. При контакте рабочей поверхности 5 цилиндрического ролика 4 с поверхностью предмета под действием силы пружины 2 обеспечивается устойчивая фрикционная связь ролика 4 с предметом и в случае проскальзывания последнего происходит вращение ролика 4 с 4 85402012.08.30 магнитом 7. При этом изменяется силавзаимного притяжения магнита 3 с пластинами 8 асимметричного биморфного пьезоэлектричекого элемента. Эта сила заставляет упруго прогибаться пластины 8 ближе к магниту 7 на расстояние в несколько микрон или долей микрон, в зависимости от жесткости пьезоэлектричекого элемента. Пьезоэлектрик 10 закреплен на упругой пластине 8 по одну сторону в каждом магниточувствительном преобразователе, поэтому один из пьезоэлектриков растягивается, а другой сжимается со средней силой , что приводит к генерации электрического заряда. Под действиемв пьезоэлектрике возбуждаются продольные электрические колебания заряда, электрическое напряжение которого 1, причем 1/31/1, где- заряд, 31 - пьезомодуль, 1 электрическая емкость этого пьезоэлектрика. Так как пьезоэлектрики подключены между собой в электрическую цепь последовательно, то выходной сигнал вых будет суммироваться вых(12)(31/131/2, где 2 и 2 - электрическая емкость и напряжение другого пьезоэлектрика. Из условия идентичности магниточувствителных преобразователей следует удвоение величины выходного сигнала, т.е. вых 21231/1. Наличие двух магниточувствительных преобразователей по разные стороны от оси 3 необходимо для устранения ложного срабатывания при наличии вектора ускорения . Наличие ускорения(в том числе при толчках или манипуляции схвата) вызывает изгиб пьезоэлектриков, аналогично воздействию силы . Отличие состоит в том, что при истинном проскальзывании предмета (вращении магнита 7) силы взаимного притяжения , действующие на пластины 8 в магниточувствительных преобразователях, противоположно направлены, а в случае наличия ускорения силы инерции приложены сонаправлено. Поэтому выходные напряжения в пьезоэлектриках будут одинакового уровня, но противоположной полярности, что при их суммировании приводит к их взаимной компенсации. Таким образом, обработка процессором выходных сигналов от всех датчиков проскальзывания позволяет получить достоверную информацию об определении статичности положения предмета относительно схвата робота, что позволяет управлять усилием сжатия схвата робота. Следовательно решена задача по повышению надежности функционирования устройства при одновременном снижении энергопотребления и материалоемкости магнитов. Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемый датчик проскальзывания соответствует требованию промышленная применимость по действующему законодательству. Фиг. 2 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: B25J 15/02, G01B 7/00
Метки: проскальзывания, датчик
Код ссылки
<a href="https://by.patents.su/5-u8540-datchik-proskalzyvaniya.html" rel="bookmark" title="База патентов Беларуси">Датчик проскальзывания</a>
Индукционный датчик
Номер патента: U 705
Опубликовано: 30.12.2002
Авторы: Минченя Николай Тимофеевич, Минченя Владимир Тимофеевич, Карпович Сергей Леонидович
МПК: G01R 33/02
Метки: датчик, индукционный
Текст:
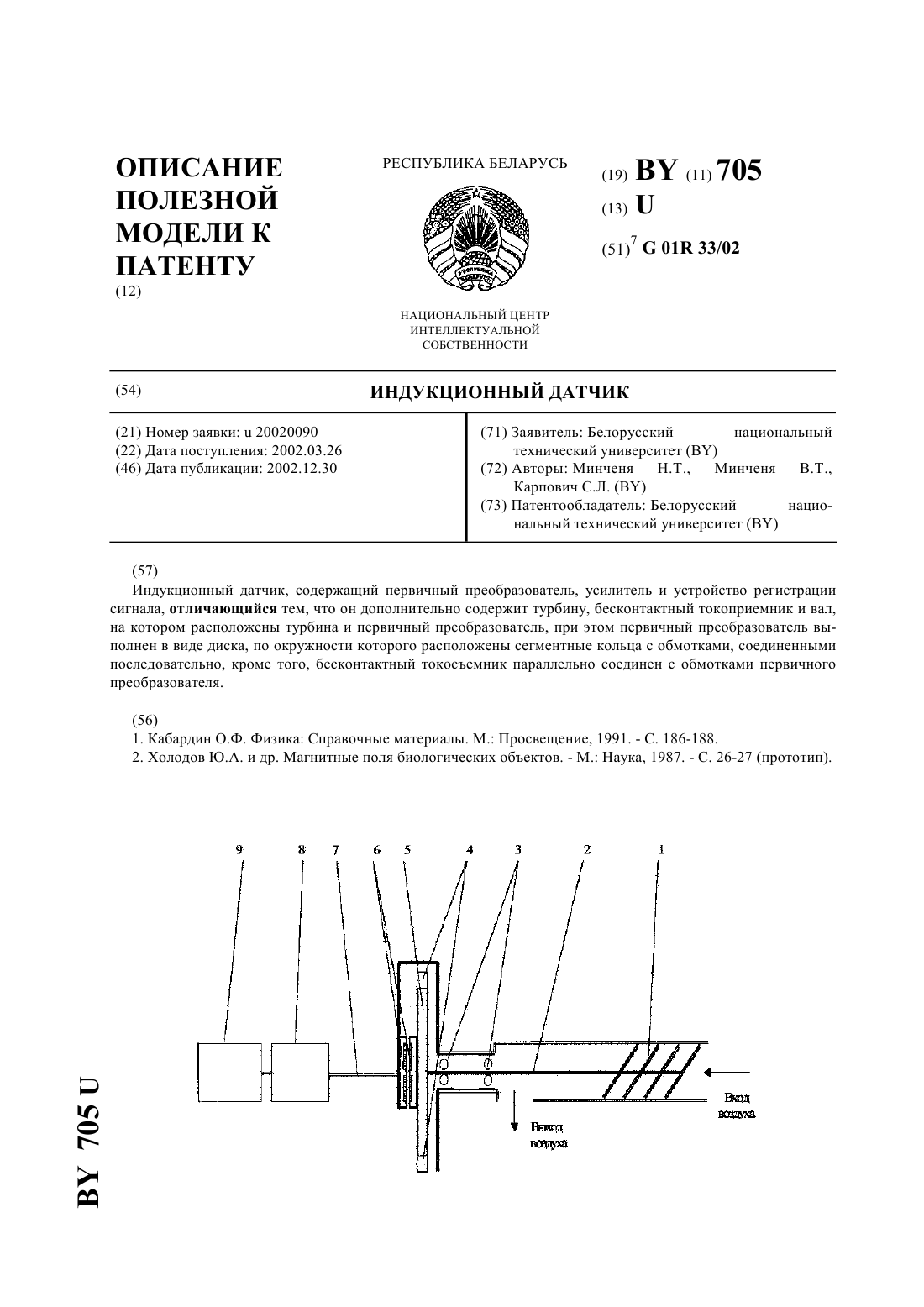
...полезной модели заключается в том, что индукционный датчик, содержащий первичный преобразователь, усилитель и устройство регистрации сигнала, дополнительно содержит турбину, бесконтактный токосъемник и вал, на котором расположены турбина и первичный преобразователь, при этом первичный преобразователь выполнен в виде диска, по окружности которого расположены сегментные кольца с обмотками, соединенными последовательно, кроме того,...
Датчик абсолютного углового положения рулевого колеса
Номер патента: U 5263
Опубликовано: 30.04.2009
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01B 7/30
Метки: датчик, положения, колеса, углового, рулевого, абсолютного
Текст:
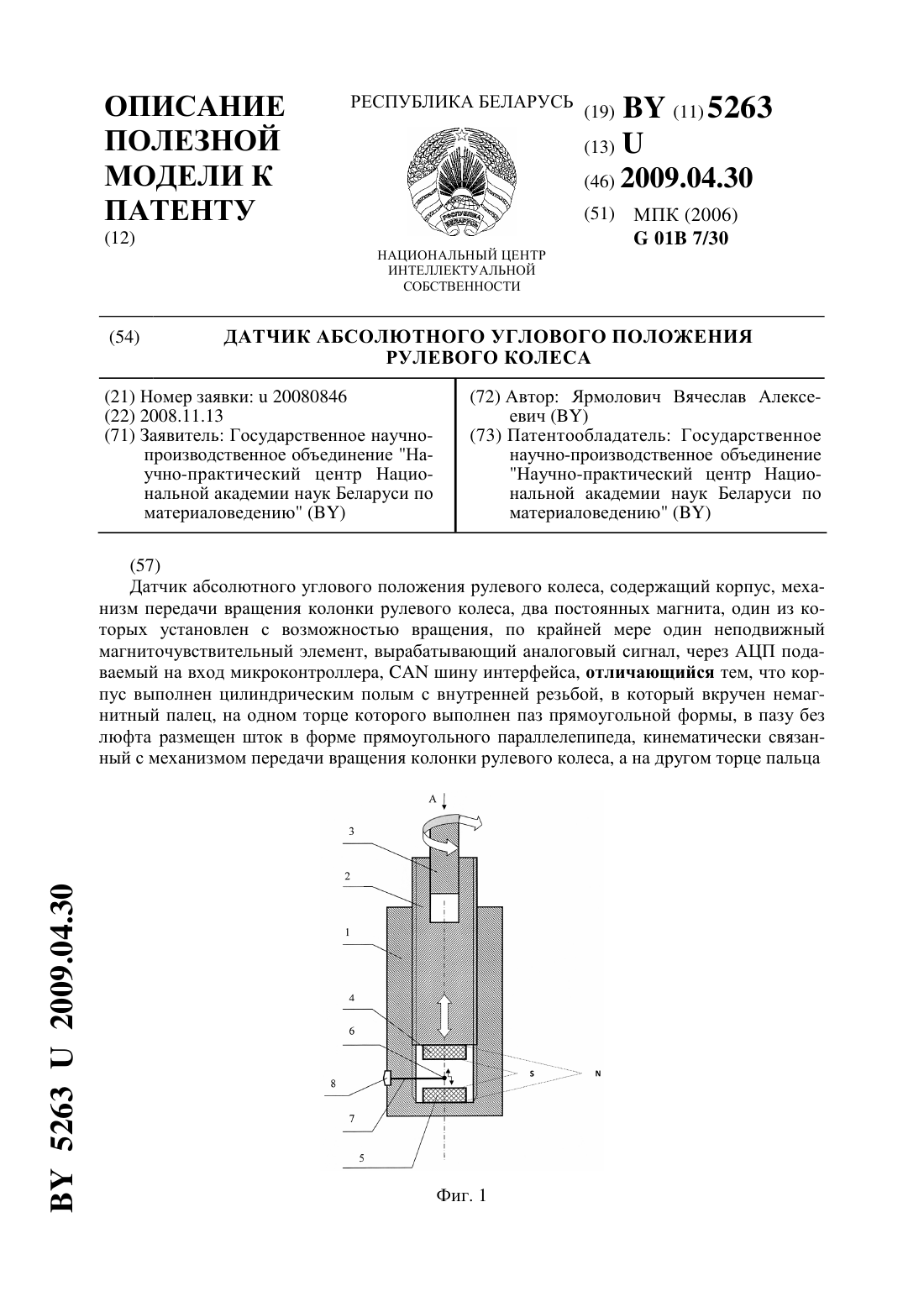
...крайней мере один неподвижный магниточувствительный элемент, вырабатывающий аналоговый сигнал, через АЦП подаваемый на вход микроконтроллера,шину интерфейса, отличается тем, что корпус выполнен цилиндрическим полым с внутренней резьбой, в который вкручен немагнитный палец, на одном торце которого выполнен паз прямоугольной формы, в пазу без люфта размещен шток в форме прямоугольного параллепипеда, кинематически связанный с механизмом передачи...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Филонов Игорь Павлович, Вериго Евгений Борисович
МПК: B25J 9/16
Метки: робота, промышленного, манипулятором, способ, управления
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Датчик угла поворота рулевого колеса автомобиля
Номер патента: U 5310
Опубликовано: 30.06.2009
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
МПК: G01B 7/30
Метки: рулевого, колеса, автомобиля, угла, поворота, датчик
Текст:
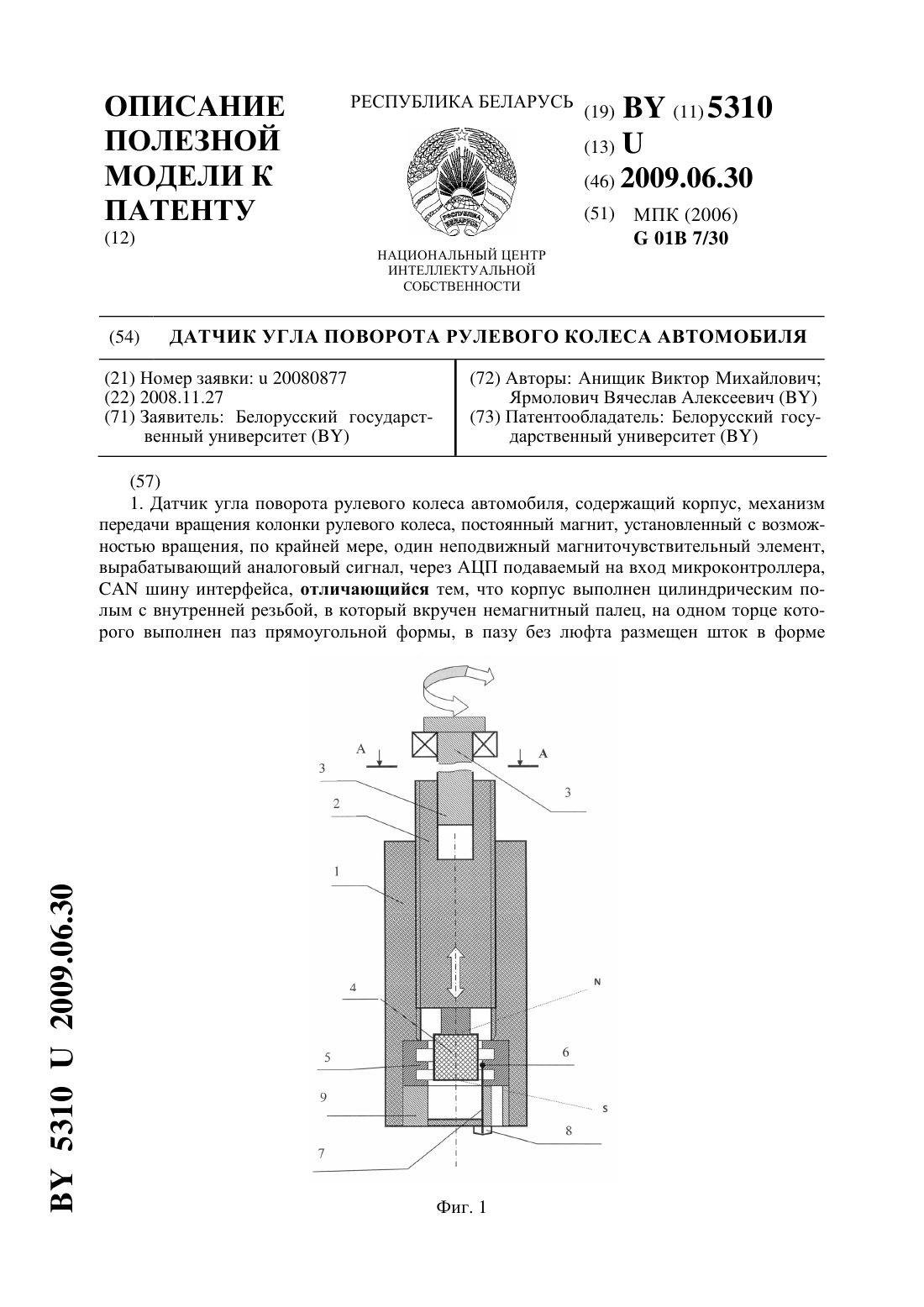
...полезной модели, является повышение надежности датчика за счет упрощения механической конструкции и уменьшения количества магниточувствительных элементов. При этом надежно определяется абсолютное угловое положение рулевого колеса в диапазоне углов не менее 1080, непосредственно после включения зажигания даже в отсутствие перемещений руля и после кратковременных прерываний напряжения питания. Решение поставленной задачи достигается тем, что...
Датчик постоянного тока
Номер патента: U 8463
Опубликовано: 30.08.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
МПК: G01R 19/00, G01R 15/20
Метки: датчик, постоянного, тока
Текст:
...его изготовления обратно пропорционально зависит от ширины воздушного зазора в соответствии с формулой (1). Проведенный анализ уровня техники позволил установить, что заявителем не обнаружено аналога, характеризующегося признаками, тождественными всем признакам заявляемой полезной модели, а определение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату...
Предыдущий патент: Станок для комбинированной обработки поверхностей бочкообразных роликов подшипников
Следующий патент: Устройство для импульсного намагничивания ферромагнитных труб
Случайный патент: Распределительное устройство пневматической сеялки