Способ управления антиблокированием колеса при торможении
Номер патента: 5566
Опубликовано: 30.09.2003
Авторы: Лещинский Андрей Иосифович, Лепешко Иосиф Иосифович, Бутылин Владимир Григорьевич, Иванов Валентин Георгиевич

Текст
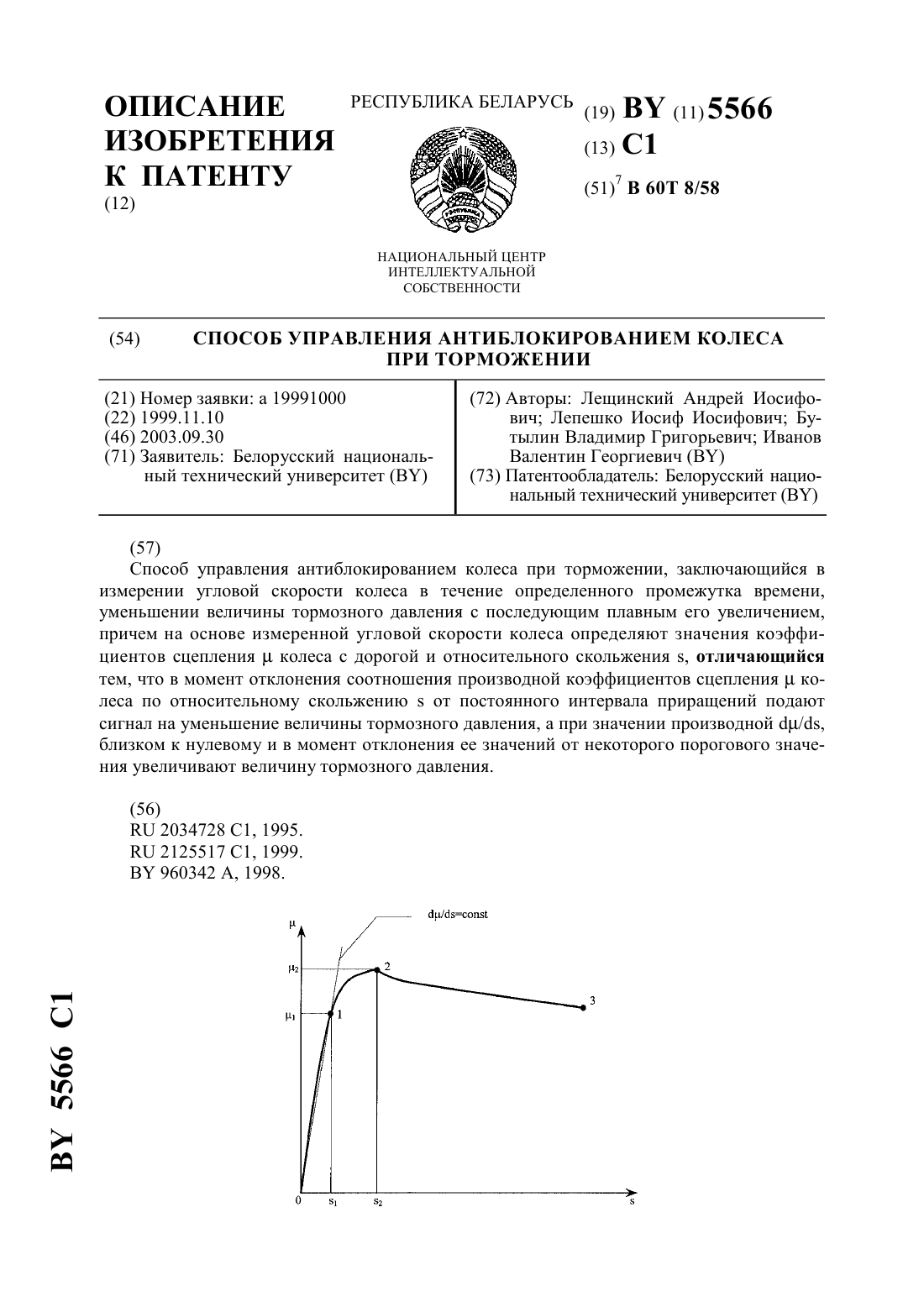
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВАНИЕМ КОЛЕСА ПРИ ТОРМОЖЕНИИ(71) Заявитель Белорусский национальный технический университет(72) Авторы Лещинский Андрей Иосифович Лепешко Иосиф Иосифович Бутылин Владимир Григорьевич Иванов Валентин Георгиевич(73) Патентообладатель Белорусский национальный технический университет(57) Способ управления антиблокированием колеса при торможении, заключающийся в измерении угловой скорости колеса в течение определенного промежутка времени,уменьшении величины тормозного давления с последующим плавным его увеличением,причем на основе измеренной угловой скорости колеса определяют значения коэффициентов сцепленияколеса с дорогой и относительного скольжения , отличающийся тем, что в момент отклонения соотношения производной коэффициентов сцепленияколеса по относительному скольжениюот постоянного интервала приращений подают сигнал на уменьшение величины тормозного давления, а при значении производной /,близком к нулевому и в момент отклонения ее значений от некоторого порогового значения увеличивают величину тормозного давления. 5566 1 Изобретение относится к способам управления антиблокированием колеса при торможении и может быть использовано в автомобилестроении и авиации для предотвращения блокировки колеса при торможении. Известен способ реализации автоматического процесса торможения автомобилей с системой антиблокировки тормозов 1, заключающийся в том, что тормозное давление на каждой оси, создаваемое при автоматическом процессе торможения, повышается на столько, что система антиблокировки фиксирует достижение границы блокировки тормоза по меньшей мере одного колеса оси. Сокращение тормозного пути достигается за счет того, что тормозное давление не только повышается до такой степени, что одно колесо транспортного средства достигает границы блокировки, но и тормозное давление отдельных осей повышается до тех пор, пока по меньшей мере одно колесо этой оси не достигнет границы блокировки. К недостаткам относится регулирование тормозного давления по колесу, находящемуся в худших условиях по сцеплению, и поэтому происходит недоиспользование сцепных свойств второго колеса этой оси, а также достижение колесом границ блокировки ухудшает устойчивость автомобиля. Известен способ управления антиблокированием колес транспортного средства 2,заключающийся в сравнении реального значения некоторого параметра, характеризующего вращение колес, с опорным значением и по результату сравнения оценивают вероятность блокировки колес. Если по результату оценки вероятность блокировки велика, регулируют тормозное давление колесных тормозов. Определяют величину усилия нажатия на тормозной педали. В случае небольшого усилия нажатия указанное опорное значение изменяют по сравнению со случаем большого усилия таким образом, чтобы в результате оценки получить более низкую вероятность блокировки. К недостаткам относится поддержание регулируемого параметра в диапазоне экстремальных значений, что приводит к уменьшению боковой реакции колеса, коэффициента бокового сцепления и появлению (с учетом реальных условий) бокового скольжения транспортного средства. Известный способ управления антиблокировкой колес транспортного средства 3. На основе электрических сигналов скорости вращения колес управляют в течение определенного промежутка времени уменьшением тормозного давления и затем попеременно через относительно небольшие промежутки времени увеличивают и поддерживают тормозное давление, причем тормозное давление увеличивают сравнительно плавно. Повторяя ряд циклов управления, предотвращают скольжение колес. Определяют разность А между скоростьювращения колес в момент начала периода управления уменьшением тормозного давления, определяемого на основе обнаруженного резкого замедления вращения колес при торможении, и скоростью 1 вращения колес в момент достижения ее пикового значения, определяемого при переходе от замедления вращения колес к их ускорению на основе уменьшения тормозного давления от момента начала периода управления. Сравнивают промежуток времениот момента увеличения скорости 1 до скорости , которая увеличилась только на заданную величину, соответствующую первой доли от разности А. В случае превышения промежутком временизаданного промежутка времениопределяют на основе среднего ускорения за этот промежутокпервый промежуток времени Тх плавного увеличения тормозного давления. В случае, если промежутокравен или меньше , при первом цикле управления задают промежуток времени Тх, равный первой заданной величине То, а при следующем цикле управления задают величину Тх,равную промежутку времени Тх при предыдущем цикле управления. Недостатком способа является то, что на первом цикле регулирования при неблагоприятных дорожных условиях возникает полное скольжение колеса. При последующих циклах регулирования, принимая предыдущие значения параметров в качестве пороговых уставок, будет происходить управление тормозным давлением на гране блокировки колеса. Задача, решаемая изобретением, состоит в создании способа управления антиблокированием каждого колеса в отдельности при торможении, позволяющего реализовывать 2 5566 1 максимальные значения продольного коэффициента сцепления с сохранением оптимальных значений коэффициентов относительного скольжения и бокового сцепления, а также иметь запас по устойчивости транспортного средства с сохранением требуемой эффективности торможения, особенно в неблагоприятных дорожных условиях. Для решения поставленной задачи в способе управления антиблокированием колеса при торможении, заключающемся в измерении угловой скорости колеса в течение определенного промежутка времени, уменьшении величины тормозного давления с последующим плавным его увеличением, на основе измеренной угловой скорости колеса определяют коэффициентов сцепленияколеса с дорогой и относительного скольжения ,затем в момент отклонения соотношения производной коэффициентов сцепленияколеса по относительному скольжениюот постоянного интервала приращений подают сигнал на уменьшение величины тормозного давления, а при значении производной / близком к нулевому, и в момент отклонения ее значений от некоторого порогового значения увеличивают величину тормозного давления. Сущность предложенного способа поясняется чертежом, где изображен график зависимости продольного коэффициента сцепленияколеса с поверхностью дороги от относительного скольжения . Способ управления антиблокированием колеса при торможении заключается в следующем предусмотрено индивидуальное автоматическое регулирование колес транспортного средства в процессе торможения, за основу регулирования принята зависимость продольного коэффициента сцепленияот относительного скольжения колеса . Начальные участки 0-1 - - диаграмм изменяются практически по линейному закону и отклонения соотношения производной коэффициента сцепления колесапо относительному скольжениюнаходятся в интервале постоянных приращений, т.е. выполняется условие/. Повышение давления происходит до тех пор, пока значения соотношения/ не достигнут точки 1, в которой происходит переход линейного участка диаграммы 0-1 к криволинейному 1-2. На участке 1-2, с момента начала регулирования, значения соотношения / будут стремиться к нулю, так как колесо некоторое время продолжает двигаться с замедлением, переходя в критическую область по скольжению (окрестность точки 2), тем самым отслеживается максимум по сцеплению в контакте колеса с дорогой с сохранением требуемой эффективности. Затем при значении производной, близком к нулевому, произойдет переход колеса от замедления к его ускорению, и в момент отклонения значений соотношения / от некоторого порогового значенияподают сигнал на увеличение величины тормозного давления. Поскольку все пороговые значения находятся на участке 1-2 - - диаграмм, колесо при этом не достигает границ блокировки, вероятность появления которой велика на участке 2-3 диаграммы. Управление антиблокированием колеса по описанному способу позволяет сохранять необходимую траекторию движения транспортного средства и одновременно реализовывать требуемую эффективность, особенно при торможении на дорогах с низким коэффициентом сцепления . Источники информации 1. Патент ЕПВ 652143 А 2, МПК В 60 Т 8/00, 1985. 2. Патент Япония 6024911 В 4, МПК В 60 Т 8/66, 1985. 3. Патент Япония 6074031 В 4, МПК В 60 Т 8/58, 1985. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60T 8/58
Метки: антиблокированием, управления, колеса, торможении, способ
Код ссылки
<a href="https://by.patents.su/3-5566-sposob-upravleniya-antiblokirovaniem-kolesa-pri-tormozhenii.html" rel="bookmark" title="База патентов Беларуси">Способ управления антиблокированием колеса при торможении</a>
Способ управления антиблокировочной системой торможения транспортного средства
Номер патента: 3439
Опубликовано: 30.06.2000
Авторы: Ким Фридрих Андреевич, Портасенок Владимир Станиславович, Лобах Василий Павлович, Ким Валерий Андреевич, Бочкарев Геннадий Владимирович, Фурунжиев Решат Ибраимович
МПК: B60T 8/52
Метки: способ, транспортного, антиблокировочной, торможения, управления, системой, средства
Текст:
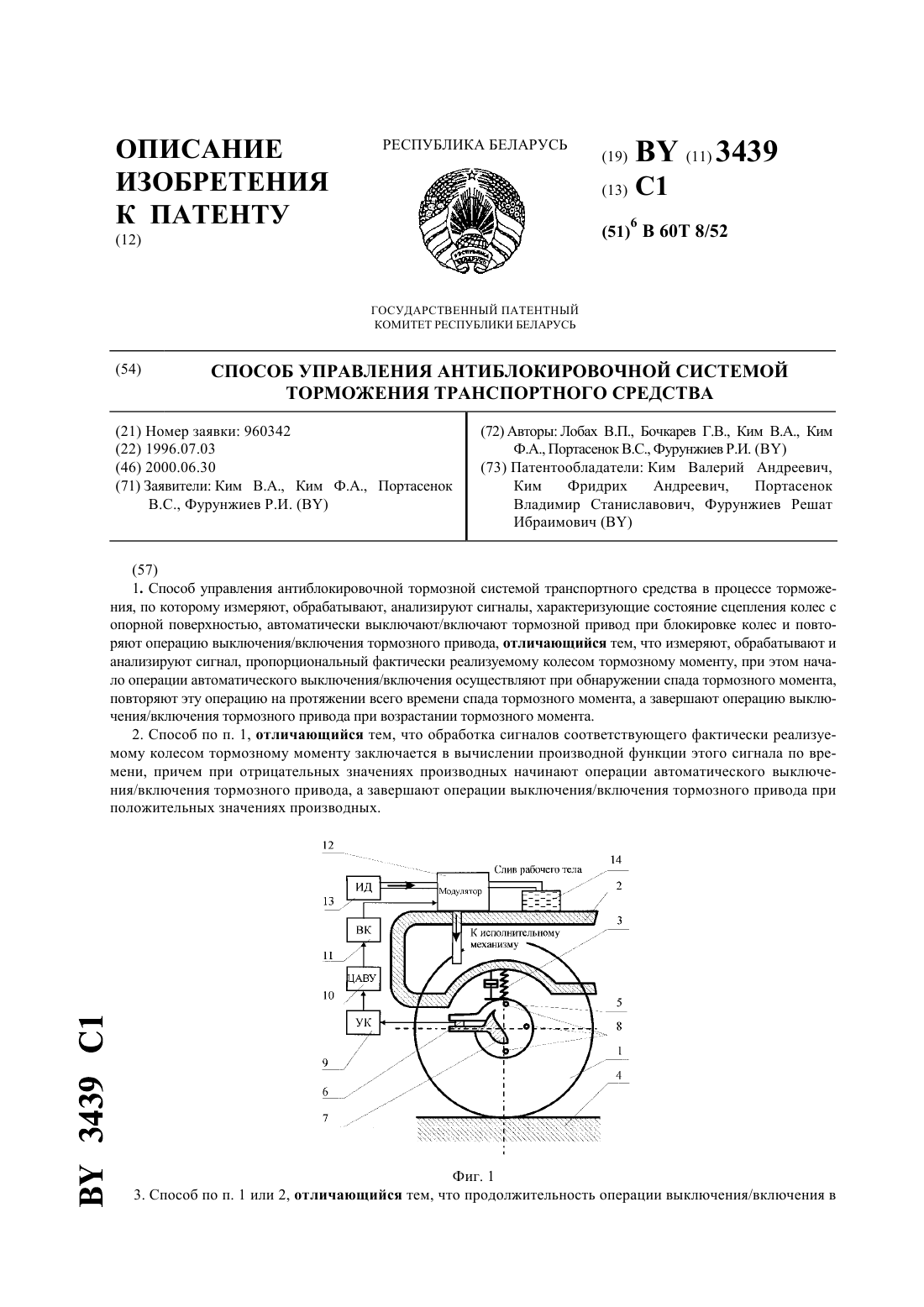
...при отрицательных значениях производных начинают операции автоматического выключения/включения тормозного привода, а завершают операции выключения/включения тормозного привода при положительных значениях производных. Поставленная задача решается также и тем, что продолжительность операции выключения/включения в интервале времени от выключения до включения тормозного привода определяют в зависимости от электромеханических свойств модуляторов...
Устройство управления процессом торможения транспортного средства
Номер патента: 2695
Опубликовано: 30.03.1999
Авторы: Лобах Василий Павлович, Ким Валерий Андреевич, Ким Фридрих Андреевич, Бочкарев Геннадий Владимирович, Портасенок Владимир Станиславович, Фурунжиев Решат Ибраимович
МПК: B60T 8/52
Метки: устройство, процессом, управления, транспортного, торможения, средства
Текст:
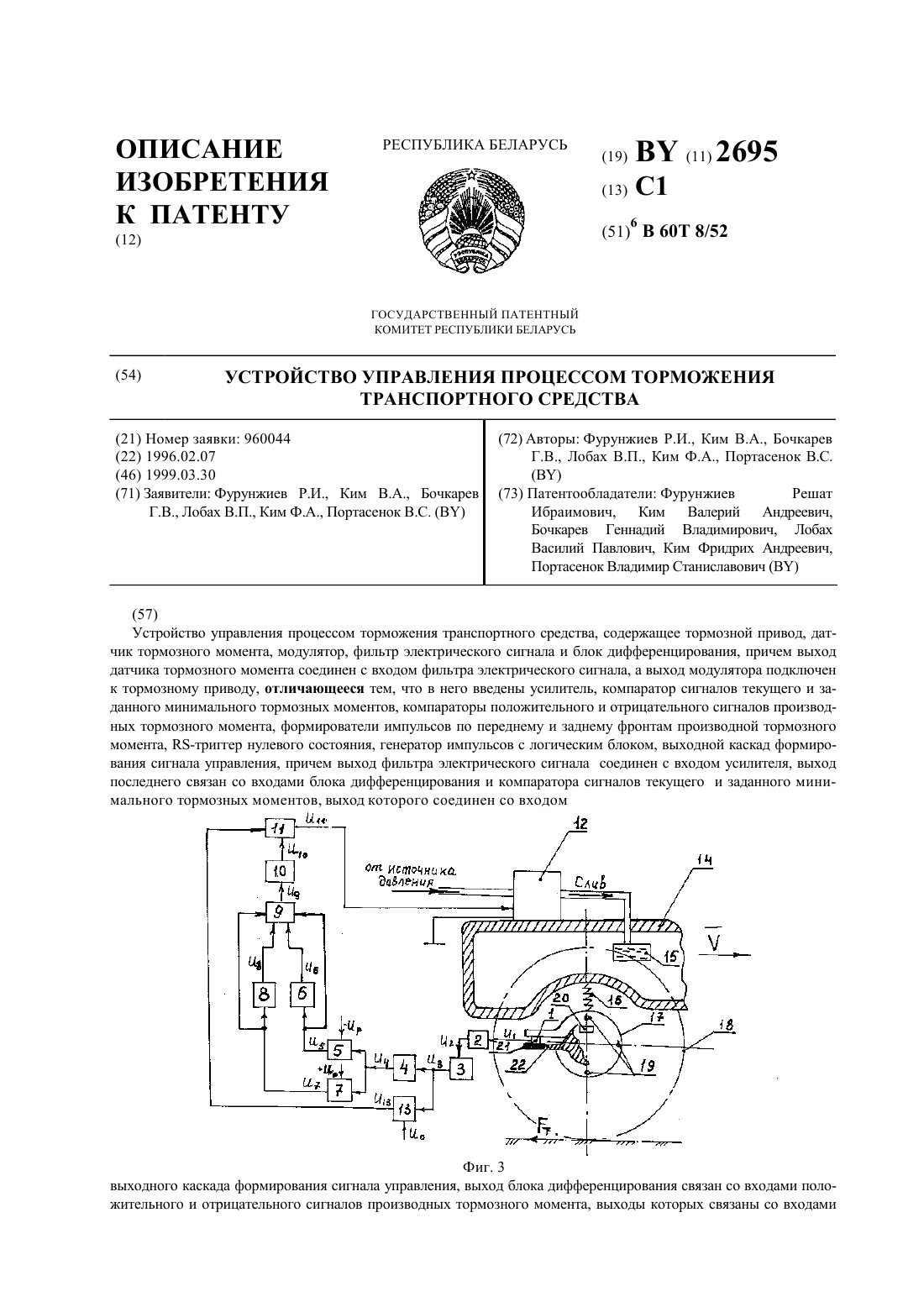
...электрического сигнала 2, усилитель сигнала 3, блок дифференцирования 4, компаратор сигналов, соответствующих текущему и заданному минимальному тормозным моментам, компараторы положительного и отрицательного сигналов производных момента 5 и 7, формирователи импульсов по переднему и заднему фронтам производной тормозного момента 6 и 8, -триггер нулевого состояния 9, генератор импульсов с логическим блоком 10, выходной каскад формирования...
Способ управления манипулятором промышленного робота

Номер патента: 5369
Опубликовано: 30.09.2003
Авторы: Вериго Евгений Борисович, Филонов Игорь Павлович
МПК: B25J 9/16
Метки: промышленного, робота, управления, способ, манипулятором
Текст:
...фактическое положение схвата в системе координат робота, на основании сравнения с заданным положением схвата вдоль заданной траектории определяют линейные перемещения схвата, обеспечивающие его переход в заданное положение, преобразуют полученные линейные перемещения схвата в обобщенные координаты звеньев манипулятора и формируют сигналы управления приводными двигателями звеньев манипулятора для достижения заданного положения схвата,...
Устройство для крепления ступицы колеса на полуоси транспортного средства, например, трактора
Номер патента: U 438
Опубликовано: 30.03.2002
Авторы: Лобач Евгений Илларионович, Борковский Владимир Ульянович, Козловский Юрий Николаевич
МПК: B60B 35/10
Метки: например, транспортного, колеса, крепления, полуоси, трактора, средства, ступицы, устройство
Текст:
...в результате снижаются производственные и эксплуатационные затраты. Устройство для крепления ступицы колеса на полуоси транспортного средства, например трактора, содержит полуось, установленную на ней состоящую из двух частей разрезную конусную втулку с фланцем и взаимодействующую наружной конусной поверхностью с внутренней конусной поверхностью смонтированной на ней ступицы, причем одна из частей разрезной конусной втулки и полуось...
Отражатель для спицевого колеса транспортного средства
Номер патента: 4938
Опубликовано: 30.03.2003
Авторы: Кот Григорий Александрович, Радкевич Михаил Иванович
МПК: B62J 6/20
Метки: спицевого, средства, колеса, отражатель, транспортного
Текст:
...в отражателе для спицевого колеса транспортного средства,состоящем из двух герметично соединенных между собой пластин со светоотражающими поверхностями, открытыми пазами на боковых поверхностях и крепежными элементами,причем крепежные элементы выполнены соответственно на каждой из пластин за одно целое с ней в противоположных четвертях контура, а горизонтальные образующие выполнены в плоскости симметрии отражателя со смещением боковых...
Предыдущий патент: Способ формирования бесселева светового пучка заданного порядка
Следующий патент: Резиновая смесь для изготовления полнопрофильных изделий
Случайный патент: Сельскохозяйственный убирающий модуль