Устройство управления процессом торможения транспортного средства
Номер патента: 2695
Опубликовано: 30.03.1999
Авторы: Ким Валерий Андреевич, Лобах Василий Павлович, Ким Фридрих Андреевич, Бочкарев Геннадий Владимирович, Портасенок Владимир Станиславович, Фурунжиев Решат Ибраимович
Текст
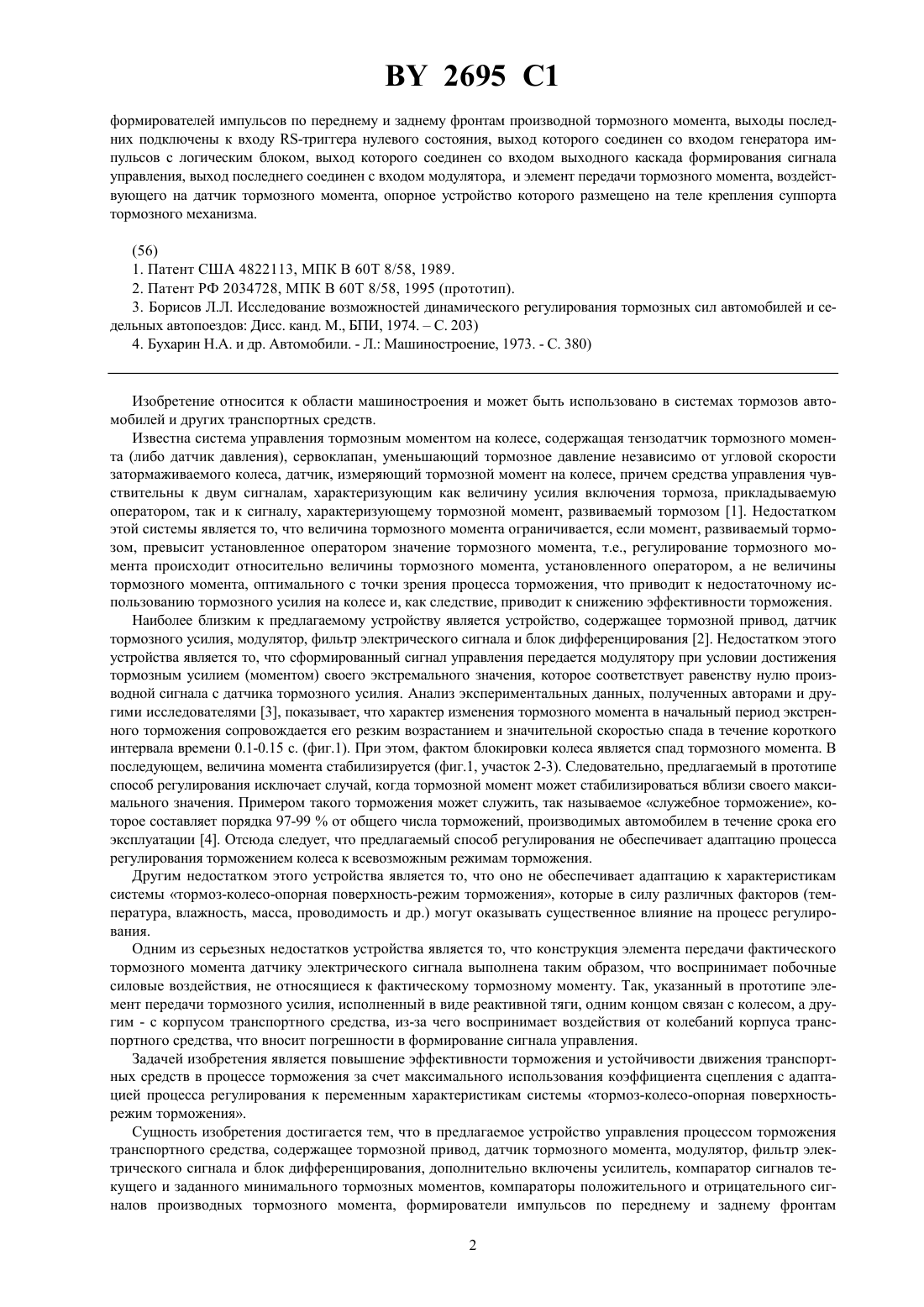
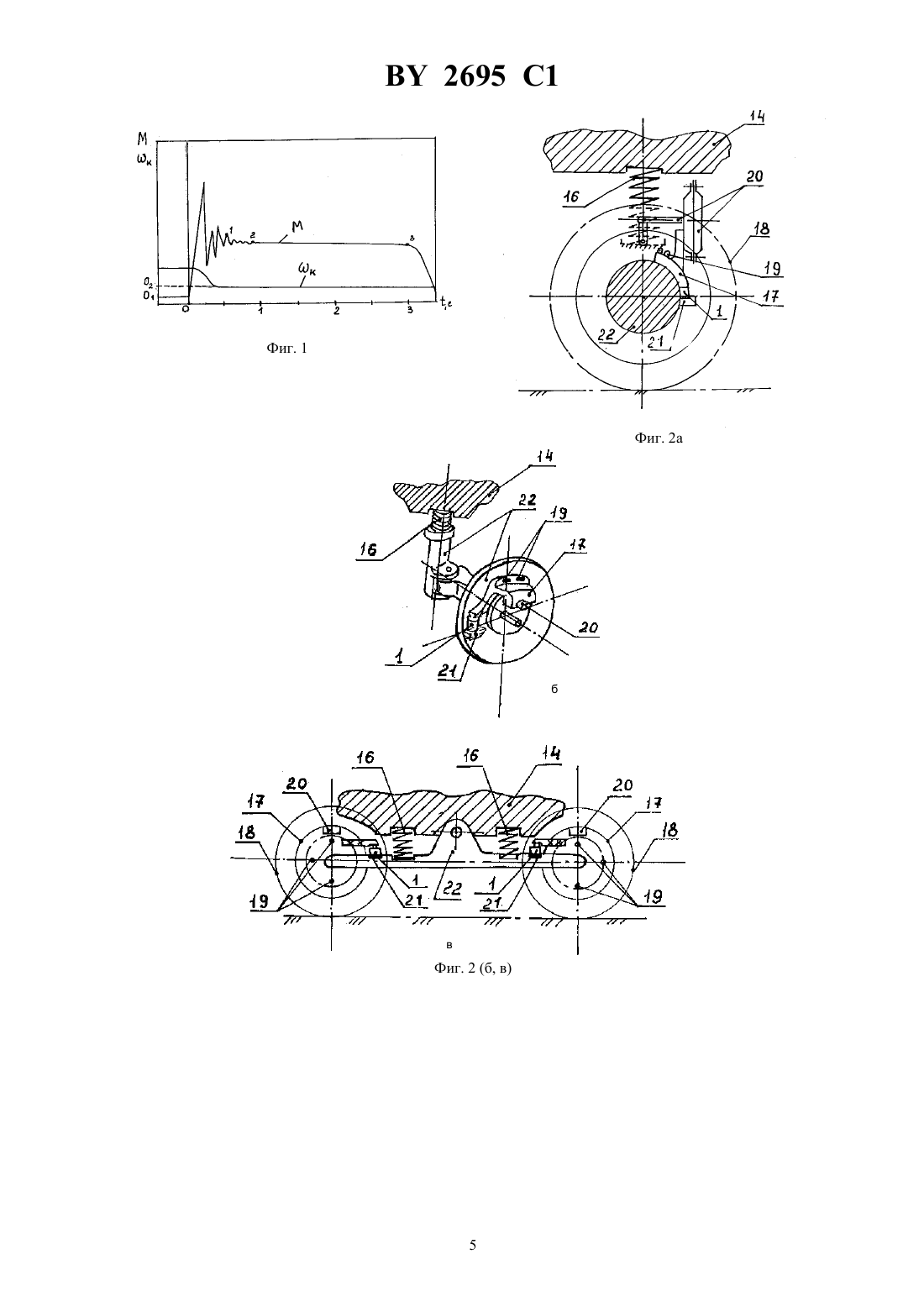
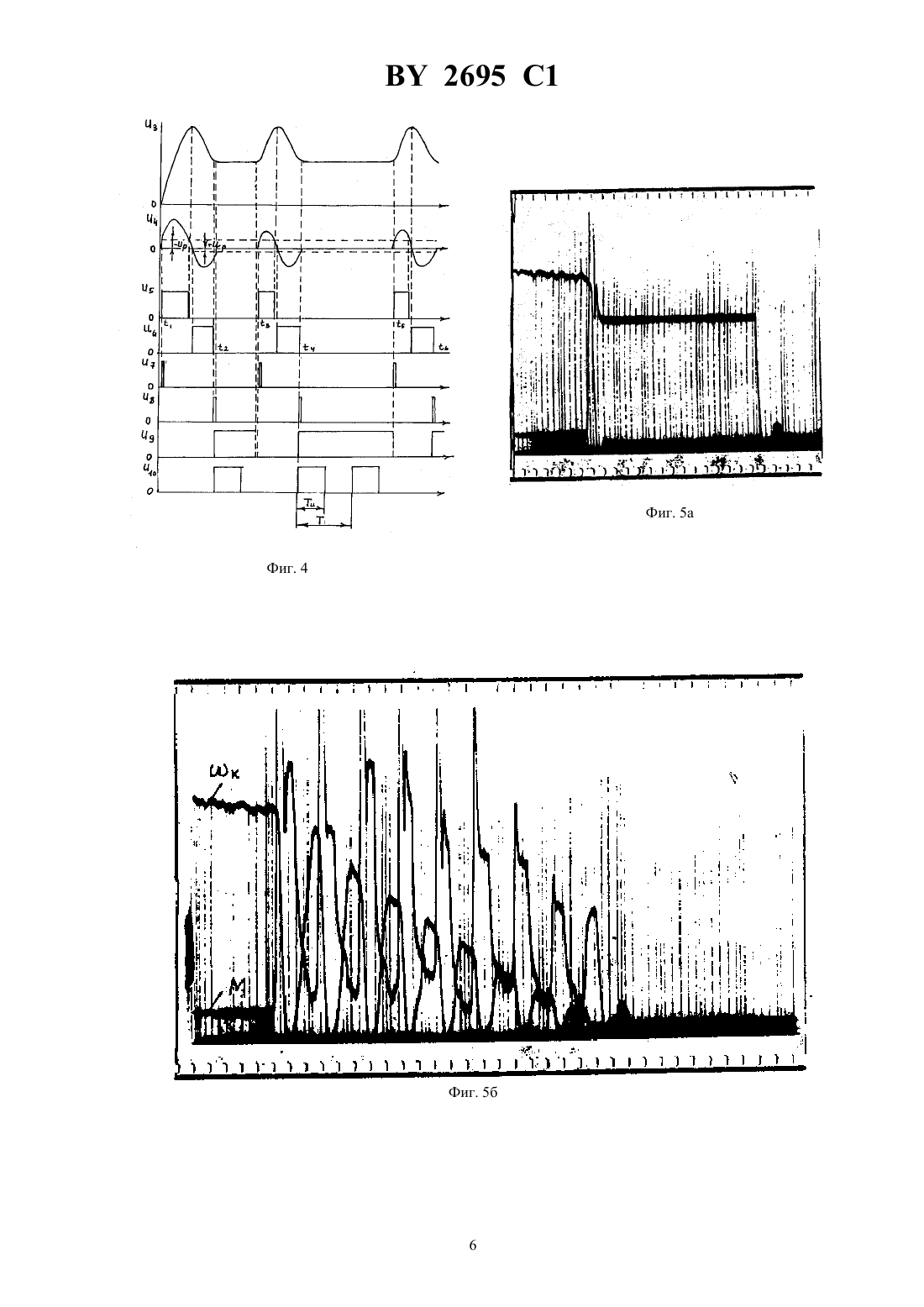
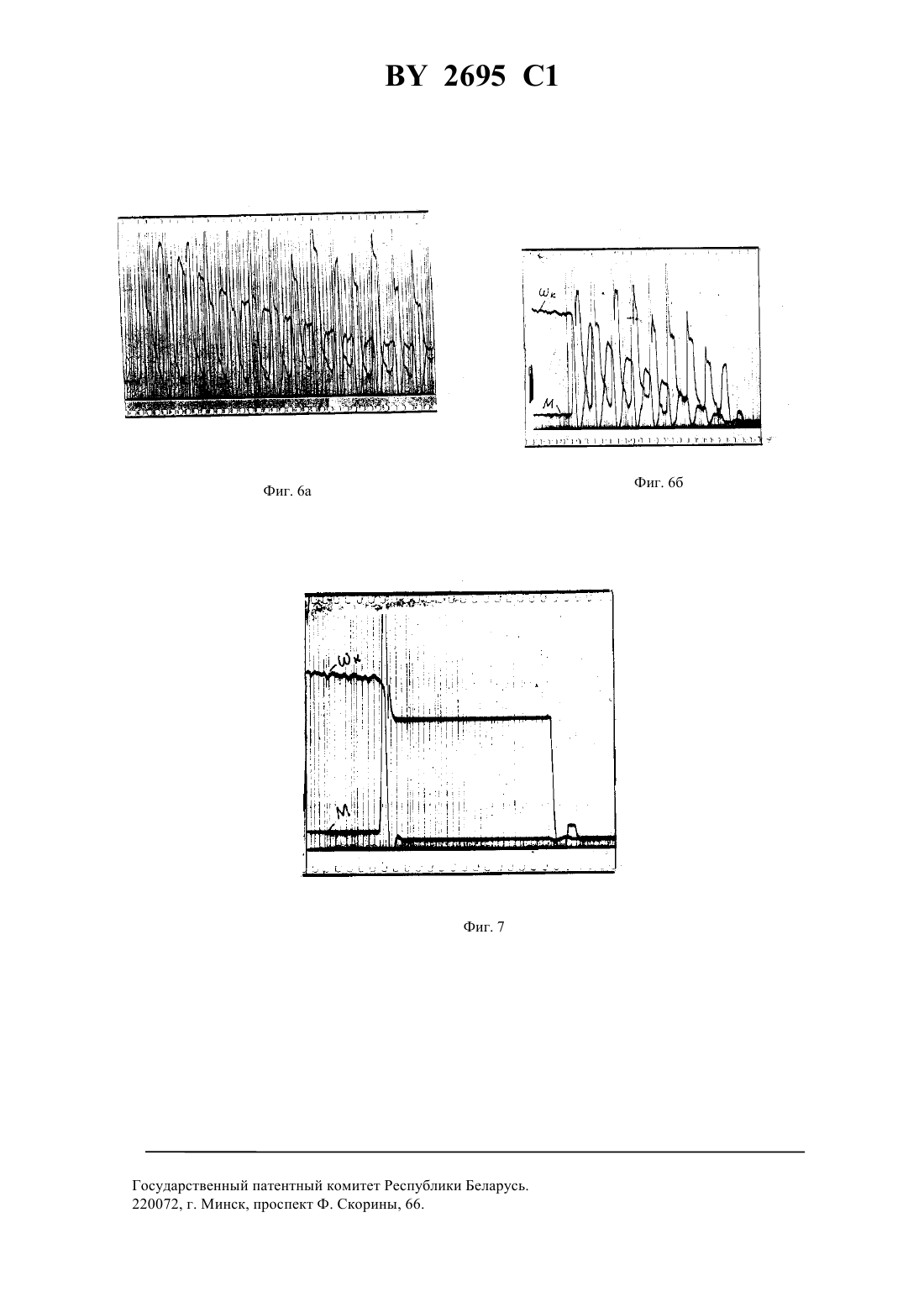
ГОСУДАРСТВЕННЫЙ ПАТЕНТНЫЙ КОМИТЕТ РЕСПУБЛИКИ БЕЛАРУСЬ УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА(73) Патентообладатели Фурунжиев Решат Ибраимович, Ким Валерий Андреевич,Бочкарев Геннадий Владимирович, Лобах Василий Павлович, Ким Фридрих Андреевич,Портасенок Владимир Станиславович(57) Устройство управления процессом торможения транспортного средства, содержащее тормозной привод, датчик тормозного момента, модулятор, фильтр электрического сигнала и блок дифференцирования, причем выход датчика тормозного момента соединен с входом фильтра электрического сигнала, а выход модулятора подключен к тормозному приводу, отличающееся тем, что в него введены усилитель, компаратор сигналов текущего и заданного минимального тормозных моментов, компараторы положительного и отрицательного сигналов производных тормозного момента, формирователи импульсов по переднему и заднему фронтам производной тормозного момента, -триггер нулевого состояния, генератор импульсов с логическим блоком, выходной каскад формирования сигнала управления, причем выход фильтра электрического сигнала соединен с входом усилителя, выход последнего связан со входами блока дифференцирования и компаратора сигналов текущего и заданного минимального тормозных моментов, выход которого соединен со входом Фиг. 3 выходного каскада формирования сигнала управления, выход блока дифференцирования связан со входами положительного и отрицательного сигналов производных тормозного момента, выходы которых связаны со входами 2695 1 формирователей импульсов по переднему и заднему фронтам производной тормозного момента, выходы последних подключены к входу -триггера нулевого состояния, выход которого соединен со входом генератора импульсов с логическим блоком, выход которого соединен со входом выходного каскада формирования сигнала управления, выход последнего соединен с входом модулятора, и элемент передачи тормозного момента, воздействующего на датчик тормозного момента, опорное устройство которого размещено на теле крепления суппорта тормозного механизма.(56) 1. Патент США 4822113, МПК 60 8/58, 1989. 2. Патент РФ 2034728, МПК 60 8/58, 1995 (прототип). 3. Борисов Л.Л. Исследование возможностей динамического регулирования тормозных сил автомобилей и седельных автопоездов Дисс. канд. М., БПИ, 1974.С. 203) 4. Бухарин Н.А. и др. Автомобили. - Л. Машиностроение, 1973. - С. 380) Изобретение относится к области машиностроения и может быть использовано в системах тормозов автомобилей и других транспортных средств. Известна система управления тормозным моментом на колесе, содержащая тензодатчик тормозного момента (либо датчик давления), сервоклапан, уменьшающий тормозное давление независимо от угловой скорости затормаживаемого колеса, датчик, измеряющий тормозной момент на колесе, причем средства управления чувствительны к двум сигналам, характеризующим как величину усилия включения тормоза, прикладываемую оператором, так и к сигналу, характеризующему тормозной момент, развиваемый тормозом 1. Недостатком этой системы является то, что величина тормозного момента ограничивается, если момент, развиваемый тормозом, превысит установленное оператором значение тормозного момента, т.е., регулирование тормозного момента происходит относительно величины тормозного момента, установленного оператором, а не величины тормозного момента, оптимального с точки зрения процесса торможения, что приводит к недостаточному использованию тормозного усилия на колесе и, как следствие, приводит к снижению эффективности торможения. Наиболее близким к предлагаемому устройству является устройство, содержащее тормозной привод, датчик тормозного усилия, модулятор, фильтр электрического сигнала и блок дифференцирования 2. Недостатком этого устройства является то, что сформированный сигнал управления передается модулятору при условии достижения тормозным усилием (моментом) своего экстремального значения, которое соответствует равенству нулю производной сигнала с датчика тормозного усилия. Анализ экспериментальных данных, полученных авторами и другими исследователями 3, показывает, что характер изменения тормозного момента в начальный период экстренного торможения сопровождается его резким возрастанием и значительной скоростью спада в течение короткого интервала времени 0.1-0.15 с. (фиг.1). При этом, фактом блокировки колеса является спад тормозного момента. В последующем, величина момента стабилизируется (фиг.1, участок 2-3). Следовательно, предлагаемый в прототипе способ регулирования исключает случай, когда тормозной момент может стабилизироваться вблизи своего максимального значения. Примером такого торможения может служить, так называемое служебное торможение, которое составляет порядка 97-99 от общего числа торможений, производимых автомобилем в течение срока его эксплуатации 4. Отсюда следует, что предлагаемый способ регулирования не обеспечивает адаптацию процесса регулирования торможением колеса к всевозможным режимам торможения. Другим недостатком этого устройства является то, что оно не обеспечивает адаптацию к характеристикам системы тормоз-колесо-опорная поверхность-режим торможения, которые в силу различных факторов (температура, влажность, масса, проводимость и др.) могут оказывать существенное влияние на процесс регулирования. Одним из серьезных недостатков устройства является то, что конструкция элемента передачи фактического тормозного момента датчику электрического сигнала выполнена таким образом, что воспринимает побочные силовые воздействия, не относящиеся к фактическому тормозному моменту. Так, указанный в прототипе элемент передачи тормозного усилия, исполненный в виде реактивной тяги, одним концом связан с колесом, а другим - с корпусом транспортного средства, из-за чего воспринимает воздействия от колебаний корпуса транспортного средства, что вносит погрешности в формирование сигнала управления. Задачей изобретения является повышение эффективности торможения и устойчивости движения транспортных средств в процессе торможения за счет максимального использования коэффициента сцепления с адаптацией процесса регулирования к переменным характеристикам системы тормоз-колесо-опорная поверхностьрежим торможения. Сущность изобретения достигается тем, что в предлагаемое устройство управления процессом торможения транспортного средства, содержащее тормозной привод, датчик тормозного момента, модулятор, фильтр электрического сигнала и блок дифференцирования, дополнительно включены усилитель, компаратор сигналов текущего и заданного минимального тормозных моментов, компараторы положительного и отрицательного сигналов производных тормозного момента, формирователи импульсов по переднему и заднему фронтам 2 2695 1 производной тормозного момента, -триггер нулевого состояния, генератор импульсов с логическим блоком,выходной каскад формирования сигнала управления, причем выход фильтра электрического сигнала соединен с входом усилителя, выход последнего связан со входами блока дифференцирования и компаратора сигналов текущего и заданного минимального тормозных моментов, выход которого соединен со входом выходного каскада формирования сигнала управления, выход блока дифференцирования связан со входами компараторов положительного и отрицательного сигналов производных тормозного момента, выходы которых связаны со входами формирователей импульсов по переднему и заднему фронтам производной тормозного момента, выходы последних подключены ко входу -триггера нулевого состояния, выход которого соединен со входом генератора импульсов с логическим блоком, выход которого соединен со входом выходного каскада формирования сигнала управления, выход последнего соединен с входом модулятора, и элемент передачи тормозного момента, воздействующего на датчик тормозного момента, опорное устройство которого размещено на теле крепления суппорта тормозного механизма. Возможные варианты исполнения данного элемента представлены на фиг. 2 (а, б, в). Подобная конструкция позволяет практическую реализацию предлагаемого устройства на любом транспортном средстве. В дальнейшем, на фиг. 2 соответствующие функциональные элементы устройства и транспортного средства имеют идентичную нумерацию. Устройство управления процессом торможения транспортного средства (фиг. 3) содержит тормозной привод 20, датчик тормозного момента 1, фильтр электрического сигнала 2, усилитель сигнала 3, блок дифференцирования 4, компаратор сигналов, соответствующих текущему и заданному минимальному тормозным моментам, компараторы положительного и отрицательного сигналов производных момента 5 и 7, формирователи импульсов по переднему и заднему фронтам производной тормозного момента 6 и 8, -триггер нулевого состояния 9, генератор импульсов с логическим блоком 10, выходной каскад формирования сигнала управления 11, модулятор 12, корпус транспортного средства 14, сливной бак 15, упруго-диссипативный элемент подвески 16, суппорт тормозного механизма 17, колесо транспортного средства 18, элементы крепления 19 суппорта тормозного механизма 17 к неподрессоренной массе 22, опорное устройство датчика электрического сигнала 21. На фиг. 2 (а, б, в) схематично показано размещение элементов 1, 14, 16-22 в случае пневмотормозов, дисковых тормозов и балансирной подвески. Максимальная величина фктичкг тормозного момента зависит от тормозной силы, которая, в свою очередь, зависит от характеристик системы тормоз-колесо-опорная поверхность-режим торможения. Устройство управления процессом торможения транспортного средства работает следующим образом (фиг. 3). Элемент передачи тормозного момента 17 воздействует на датчик электрического сигнала 1. Сигнал от датчика 1, пропорциональный тормозному моменту, проходит через фильтр 2 и поступает на вход усилителя 3,который формирует сигнал 3 необходимой величины и формы, поступающий на блок дифференцирования 4 и компаратор сигналов, соответствующих текущему и заданному минимальному тормозным моментам 13, для которого задается опорное напряжение 0, соответствующее минимальному тормозному моменту. Например,если в процессе торможения сигнал 3 становится меньше опорного напряжения 0, то компаратор 13 формирует дискретный сигнал блокировки 13 для выходного каскада 11. При этом включение модулятора 12 невозможно. Если нет запирания выходного каскада 11, то сигнал 3, проходя через блок дифференцирования 4, формирует сигнал 4, пропорциональный производной фактического тормозного момента. Последний поступает на компараторы 5 и 7 положительного и отрицательного сигналов производных тормозного момента. Для компаратора положительного сигнала производной задается опорное напряжение - р. Сформированный им дискретный сигнал 5 поступает на вход формирователя импульсов по переднему фронту производной тормозного момента (фиг. 4), на выходе которого формируются короткие по длительности импульсы напряжения 6,поступающие на вход -триггера нулевого состояния 9. Для компаратора 7 отрицательного сигнала производной тормозного момента задается опорное напряжениер. Сформированный им дискретный сигнал 1, фаза заднего фронта которого может изменяться путем задания различных значений опорного напряженияр, поступает на вход формирователя импульсов по заднему фронту производной тормозного момента 8, на выходе которого формируются короткие импульсы напряжения 8, поступающие на вход -триггера нулевого состояния 9. На фиг. 4 приведена схематичная иллюстрация формирования сигнала управления процессом торможения. Моменты времени 1, 3 и 5 соответствуют формированию импульсов 6, по переднему фронту дискретных сигналов 5, определяющих положительную полярность производных тормозного момента. Моменты времени 2, 4 и 6 соответствуют формированию импульсовпо заднему фронту дискретных сигналов 7, определяющих отрицательную полярность производных тормозного момента. Длительность сигналов, формируемых генератором импульсов с логическим блоком 10, равна Т, а период их следования равен Т. На выходе -триггера нулевого состояния 9 формируется дискретный сигнал 9, длительность и фаза которого зависит от уровней положительного и отрицательного сигналов производных тормозного момента 3, пропорциональный фактическому тормозному моменту и величинам опорных напряжений - р,р. Сигнал 9,3 2695 1 формируемый -триггером, поступает на генератор импульсов с логическим блоком 10 и служит разрешающим сигналом его работы. Таким образом, пока -тригтер находится в единичном состоянии генератор импульсов с логическим блоком 10 формирует последовательные импульсы 10, длительность Т и частота 1/Т которых определяются характеристиками системы. Суммарная длительность дискретных сигналов 5 и 7 в конечном счете определяет способность электромеханической части системы производить полную разблокировку колес при значительном уменьшении коэффициента сцепления. Следовательно, в процессе работы предлагаемого устройства генератор импульсов с логическим блоком 10 производит сравнение каждого последующего сигнала с предыдущим для определения минимально возможного времени открытия клапанов модулятора, достаточного для полной разблокировки колес. Это минимально возможное время запоминается для дальнейшего регулирования процесса торможения на данном цикле. В каждом новом цикле торможения минимальное время срабатывания модулятора непрерывно уточняется в зависимости от состояния системы тормоз-колесо-опорная поверхность-режим торможения. В качестве иллюстрации изложенного, рассмотрим результаты натурных испытаний торможения колеса автомобиля, представленные на фиг. 1 и фиг. 5, где кривые изменения тормозного момента обозначены буквой М, а угловая скорость - . На фиг. 1 начало скольжения колес характеризуется резким спадом тормозного момента,а последующий участок 2-3 кривой момента соответствует полной блокировке тормозимого колеса. Рассмотрим процесс торможения колеса с использованием предлагаемого устройства. На фиг. 5 приведены фрагменты стендовых испытаний в режиме экстренного (фиг. 5 а) и комбинированного (экстренно-служебного) торможения (фиг. 5 б). Вначале рассмотрим процесс экстренного торможения. Резкий спад тормозного момента на фиг. 5 а объясняется уменьшением коэффициента сцепления, который, в свою очередь, вызван блокировкой колеса. На фиг. 5 а состоянию полной блокировки колеса соответствуют моменты времени 1, 2 и 3 и. Началу первого этапа процесса регулирования на кривой тормозного момента соответствует точка 1. Время регулировяния при этом равно Т 1. Последующее возрастание момента после разблокировки колеса начинается от точки 2. Второй этап процесса регулирования момента начинается с точки 3. Время регулирования при этом равно Т 2. Третий этап процесса регулирования момента начинается с точки 4. Из сравнения периодов регулирования первого и второго этапов видно, что Т 1 Т 2. Это объясняется тем, что устройство управления производит поиск минимально возможного времени, достаточного для полной разблокировки колеса. Эту операцию выполняет блок 10, показанный на фиг. 3. Т.е. производится адаптация системы управления к характеристикам системы тормоз-колесо-опорная поверхность-режим торможения. В дальнейшем, если происходит изменение состояния указанной системы, что оценивается повышением фактического тормозного момента после разблокировки колеса, процедура поиска блоком 10 повторяется. Рассмотрим теперь процесс комбинированного торможения (фиг. 5 б), позволяющий провести проверку адаптации предлагаемого устройства к изменениям режимов торможения. Для этого на участке АВС осуществлялось экстренное торможение с характерными признаками возрастания и спада тормозного момента. Устройство управления отреагировало на характерное изменение тормозного момента регулированием (участок ). В последующем оператор уменьшил величину момента, при котором характерных признаков возрастания и спада тормозного момента не наблюдалось и автоматическое регулирование не производилось. Следовательно,формирование дискретных сигналов по передним и задним фронтам устройством управления обеспечивает нормальное функционирование при любых режимах торможения. Осциллограммы натурных испытаний торможения заднего правого колеса на автомобиле ВАЗ-2108 с опытным устройством управления при движении по асфальтовой поверхности, покрытой уплотненным снежным покровом,приведены на фиг. 6. При этом фиг. 6 а соответствует курсовой скорости движения 16.7 м/с, а фиг. 6 б - скорости 4.0 м/с. Для сравнения на фиг. 7 приведена осциллограмма экстренного торможения в тех же условиях, но без автоматического регулирования. Практическая возможность реализации предлагаемого устройства подтверждена изготовлением опытного образца, а его работоспособность доказана стендовыми и натурными испытаниями. Применение предлагаемого устройства обеспечивает, по сравнению с прототипом, следующие преимущества 1. Возможность практической реализации на любом транспортном средстве. 2. Максимальное использование коэффициента сцепления. 3. Адаптация к переменным характеристикам системы тормоз-колесо-опорная поверхность-режим торможения. Государственный патентный комитет Республики Беларусь. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: B60T 8/52
Метки: транспортного, управления, устройство, процессом, торможения, средства
Код ссылки
<a href="https://by.patents.su/7-2695-ustrojjstvo-upravleniya-processom-tormozheniya-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Устройство управления процессом торможения транспортного средства</a>
Устройство для автоматического управления электроприводом автономного транспортного средства
Номер патента: 59
Опубликовано: 30.09.1994
Авторы: Андреев Ю. М., Шор М. Е., Брискман Я. А.
МПК: B60L 11/04
Метки: управления, транспортного, электроприводом, средства, устройство, автономного, автоматического
Текст:
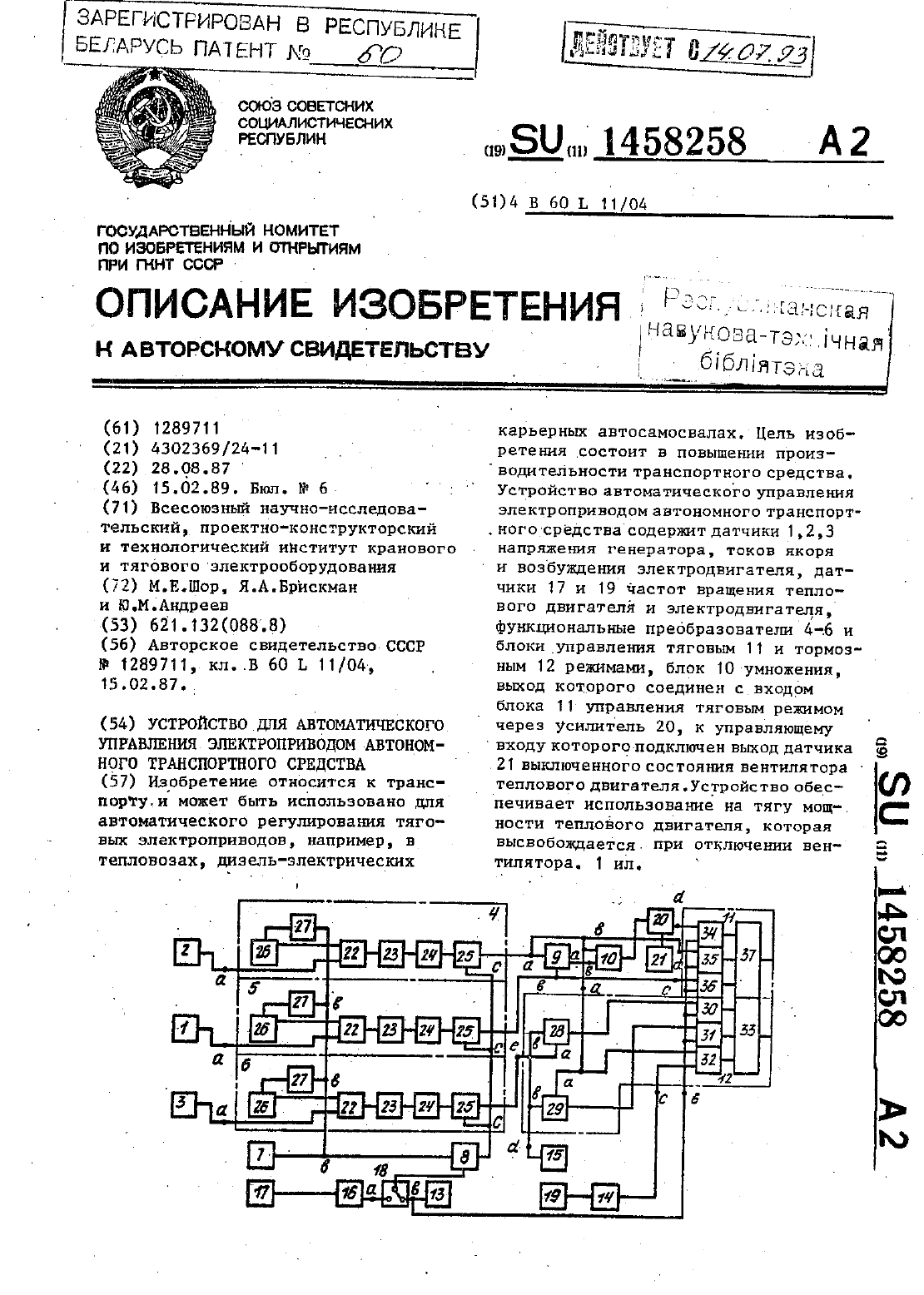
...16 нагрузки преобразует период частоты вращения теплового двигателя в напряжение ПСигнал напряжения, пропорционапьный периоду частоты Ед алгебраически суммируется с постоянным иапряжением которое-корректирует зависимость мощности злектроцвигателя Р от частоты ЕдДВеличина текущего значения вынодного напряжения интегратора 8 пропорциональна величине входного напряжения Сы При этом сигнал навыходе блока 23-памяти пропорционален величине...
Устройство для автоматического управления электроприводом автономного транспортного средства
Номер патента: 60
Опубликовано: 30.09.1994
Авторы: Шор М. Е., Андреев Ю. М., Брискман Я. А.
МПК: B60L 11/04
Метки: управления, электроприводом, устройство, средства, автоматического, автономного, транспортного
Текст:
...времени напряжения на выходе-интегра- равномн соседними имулвсами на вьшоде пр К 4 51 КБ-г 1 екомпаратора 22 пропорционален значе Где р павнию измеряемого напряжения Н. Формирователь 23 по переднему фронту нмпульсов компаратора 22 формирует 15где К 4 К 1 К 1 кк,. ч 7 Ед - регулируемый-коэффициент, учитывающй джоулевые поте 7 и 1щееся на выходе интегратора 8 В этот 2 П датиик 21 состояня вентилятора теплового двигателя-формирует логичес...
Противоблокировочное устройство транспортного средства
Номер патента: 1415
Опубликовано: 16.12.1996
Авторы: Лобах Василий Павлович, Портасенок Владимир Станиславович, Ким Валерий Андреевич, Фурунжиев Решат Ибраимович, Ким Василий Андреевич, Ким Фридрих Андреевич
МПК: B60T 8/52
Метки: противоблокировочное, устройство, транспортного, средства
Текст:
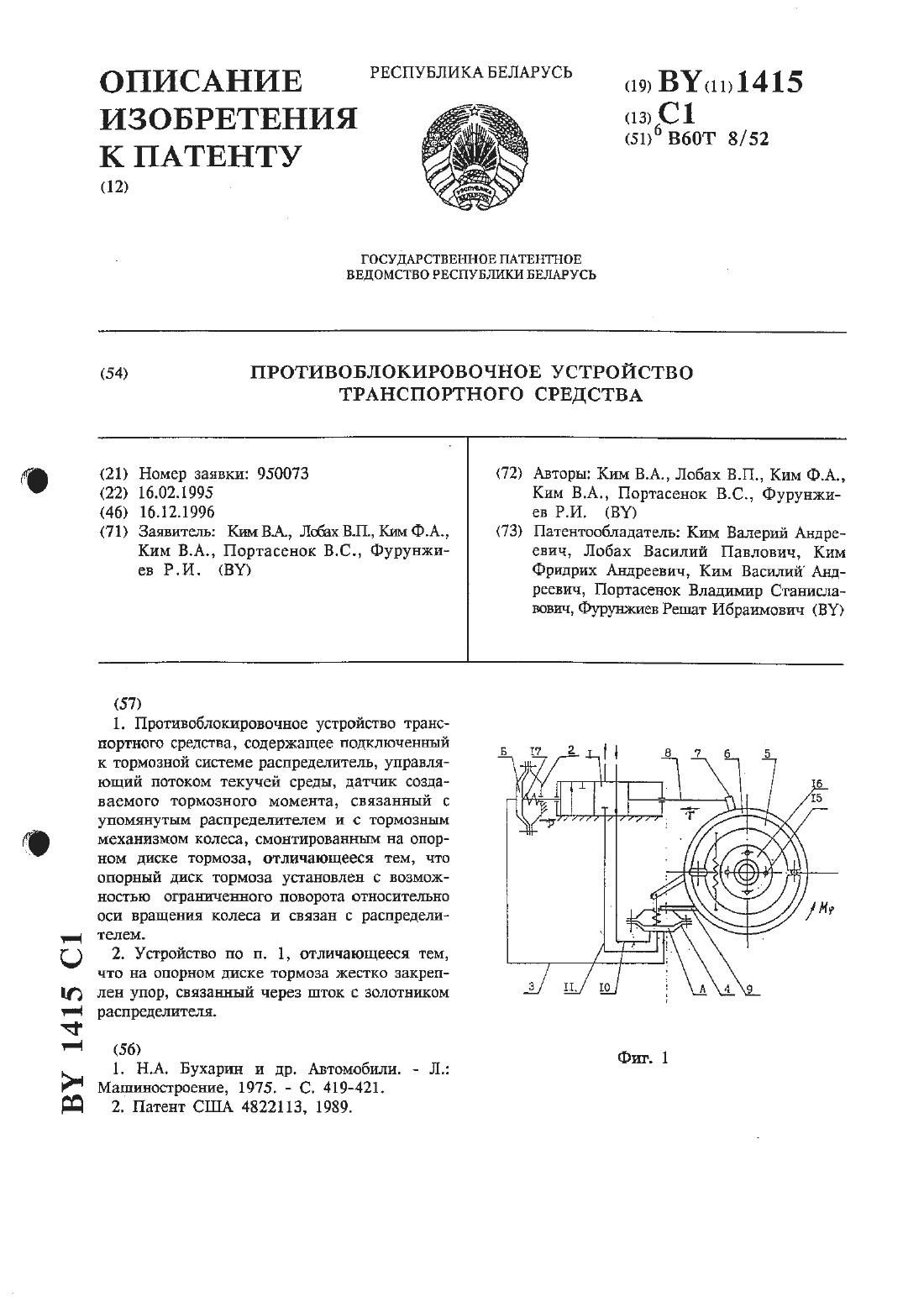
...элементом управления, который без преобразования силовых факторов (момент,ДЗВЛНИС) ПОЗБОЛЯСТ ПРОИЗВОДИТЬ регулирование путем сравнения давления текучей среды в тормозной системе, получаемого от воздействия оператора и давления текучей среды,СОЗДЗВЗВМОП) фЗКТИЧССКИ реализуемым КОЛЕсом тормозным моментом, получаемого от элемента передачи фактически реализуемого тормозного момента. Прямое сравнение сило вых факторов упрощает конструкцию...
Устройство дистанционного управления коробкой передач транспортного средства
Номер патента: 654
Опубликовано: 30.06.1995
Авторы: Дреко А. К., Захарик А. М., Евстратовский А. В., Торгонский А. Р.
МПК: B60K 20/02
Метки: коробкой, транспортного, управления, устройство, средства, дистанционного, передач
Текст:
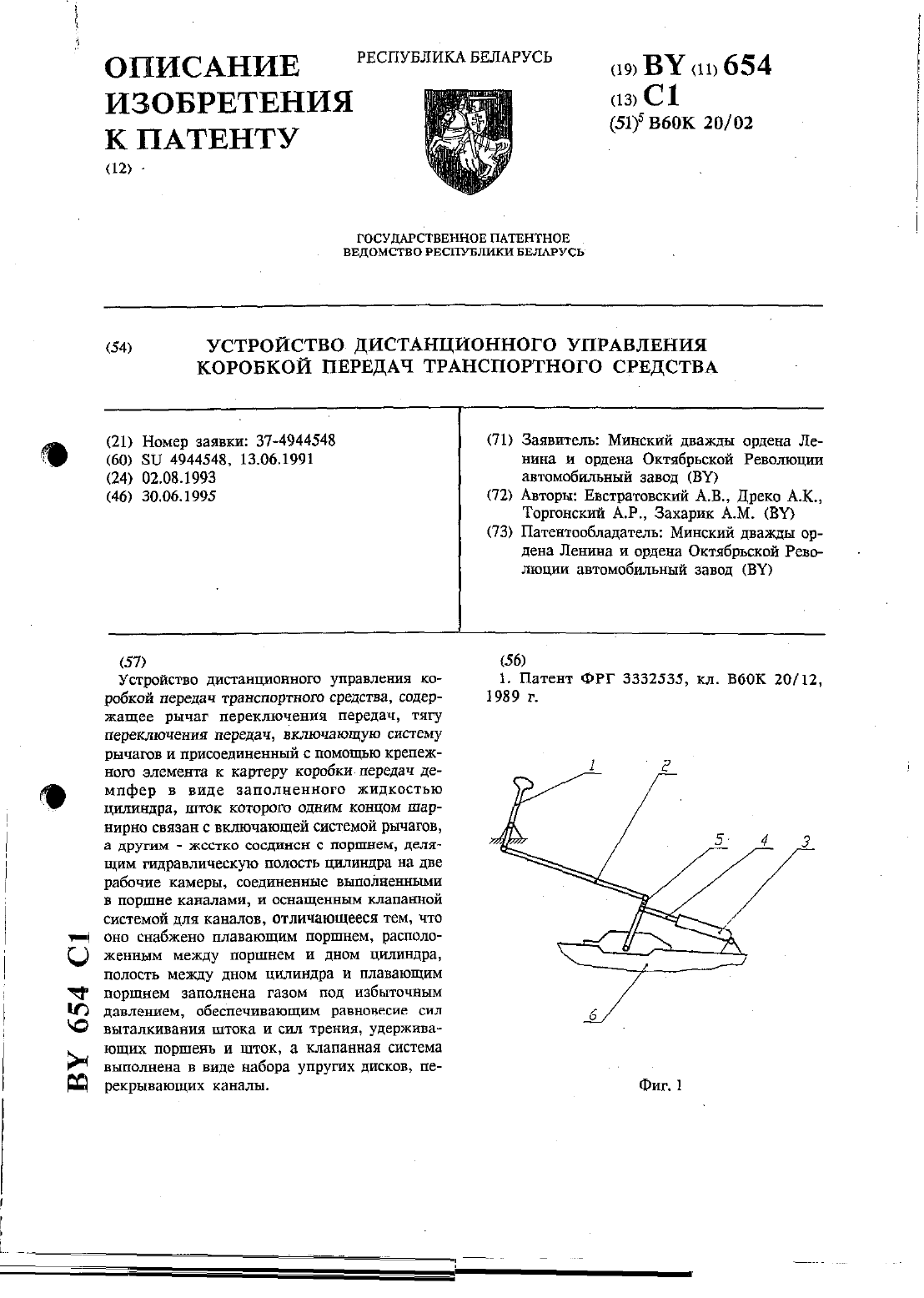
...присоединенный с помощью крепежного элемента к картеру коробки передач демпфер в виде заполненного жидкостью цилиндра, шток которого одним концом шарнирно связан с в ючающей системой рычагов, а ДРУГИМ - же тко соединен с поршнем, делящим гидравличе кую полость цилиндра на дне рабочие камеры соединенные выполненными в поршне канахми,и оснащенным клапанной системой для каналов, согласно изобретению, снабжено плавающим поршнем, расположенным...
Устройство управления коробкой передач транспортного средства
Номер патента: 1726
Опубликовано: 30.09.1997
Авторы: Евстратовский Александр Владимирович, Захарик Андрей Михайлович, Торгонский Анатолий Романович
МПК: B60K 20/02
Метки: передач, устройство, транспортного, коробкой, управления, средства
Текст:
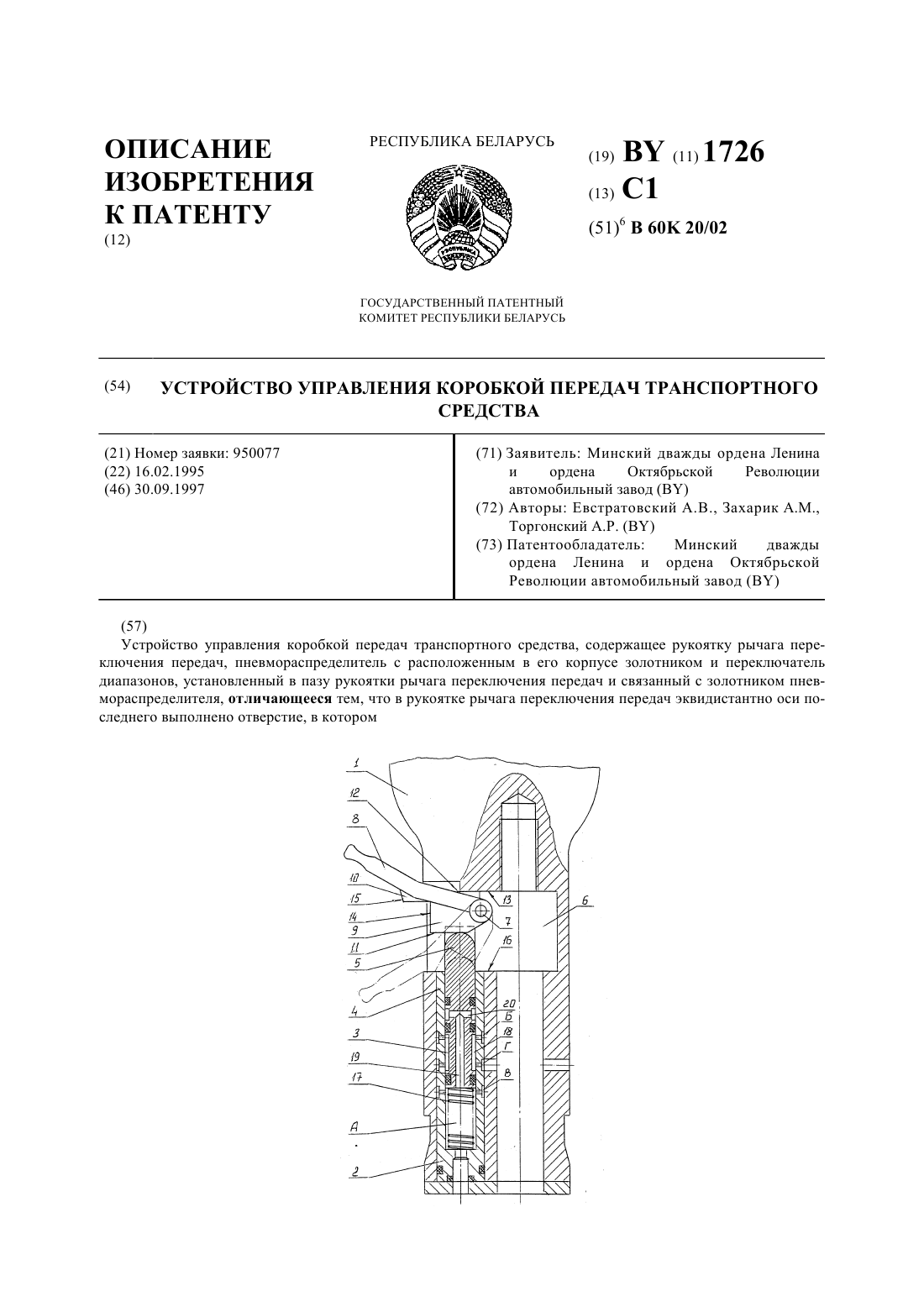
...соответственно с золотником пневмораспределителя и поверхностью паза рукоятки, причем золотник пневмораспределителя подпружинен в сторону переключателя диапазонов. На чертеже представлено устройство управления коробкой передач (контурными линиями показано верхнее положение переключателя диапазонов, штрихпунктирными - нижнее положение). Устройство управления коробкой передач транспортного средства содержит рукоятку 1 рычага переключения...
Предыдущий патент: Cпособ лечения рака почки
Следующий патент: Дробилка
Случайный патент: Устройство для обработки волокнистых пищевых продуктов