Система управления блокировками дифференциалов колесной машины
Номер патента: U 4189
Опубликовано: 28.02.2008
Авторы: Чернин Михаил Абрамович, Белоус Михаил Михайлович, Николаев Юрий Иванович, Дубовик Дмитрий Александрович, Высоцкий Михаил Степанович, Лабецкий Леонид Николаевич
Текст
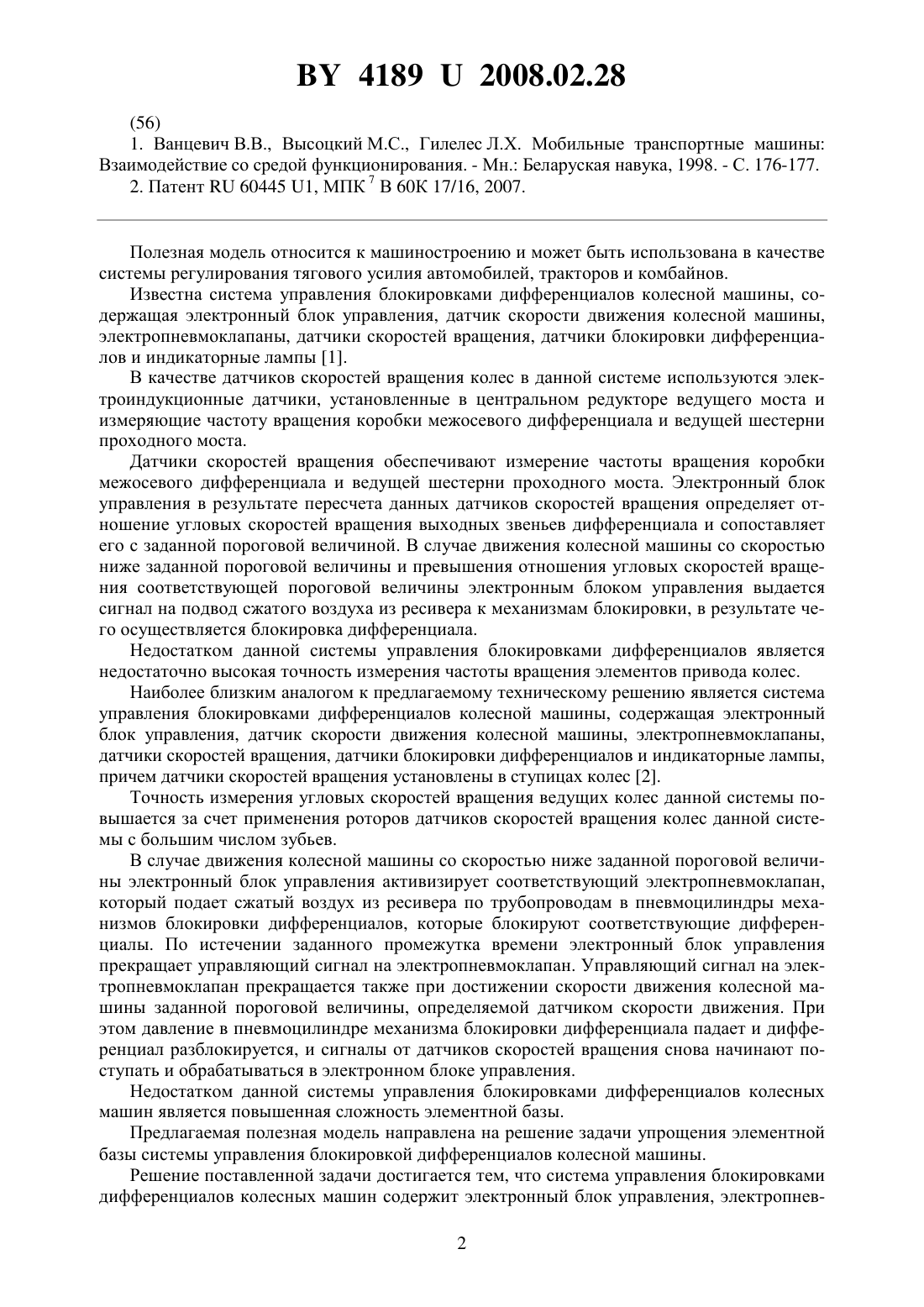
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА УПРАВЛЕНИЯ БЛОКИРОВКАМИ ДИФФЕРЕНЦИАЛОВ КОЛЕСНОЙ МАШИНЫ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Высоцкий Михаил Степанович Дубовик Дмитрий Александрович Белоус Михаил Михайлович Николаев Юрий Иванович Лабецкий Леонид Николаевич Чернин Михаил Абрамович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Система управления блокировками дифференциалов колесной машины, содержащая электронный блок управления, электропневмоклапаны, датчики скоростей вращения ведущих колес, датчики блокировки дифференциалов и индикаторные лампы, отличающаяся тем, что в качестве датчика скорости движения колесной машины служат датчики вращения ее ведущих колес.(56) 1. Ванцевич В.В., Высоцкий М.С., Гилелес Л.Х. Мобильные транспортные машины Взаимодействие со средой функционирования. - Мн. Беларуская навука, 1998. - С. 176-177. 2. Патент 60445 1, МПК 7 В 60 К 17/16, 2007. Полезная модель относится к машиностроению и может быть использована в качестве системы регулирования тягового усилия автомобилей, тракторов и комбайнов. Известна система управления блокировками дифференциалов колесной машины, содержащая электронный блок управления, датчик скорости движения колесной машины,электропневмоклапаны, датчики скоростей вращения, датчики блокировки дифференциалов и индикаторные лампы 1. В качестве датчиков скоростей вращения колес в данной системе используются электроиндукционные датчики, установленные в центральном редукторе ведущего моста и измеряющие частоту вращения коробки межосевого дифференциала и ведущей шестерни проходного моста. Датчики скоростей вращения обеспечивают измерение частоты вращения коробки межосевого дифференциала и ведущей шестерни проходного моста. Электронный блок управления в результате пересчета данных датчиков скоростей вращения определяет отношение угловых скоростей вращения выходных звеньев дифференциала и сопоставляет его с заданной пороговой величиной. В случае движения колесной машины со скоростью ниже заданной пороговой величины и превышения отношения угловых скоростей вращения соответствующей пороговой величины электронным блоком управления выдается сигнал на подвод сжатого воздуха из ресивера к механизмам блокировки, в результате чего осуществляется блокировка дифференциала. Недостатком данной системы управления блокировками дифференциалов является недостаточно высокая точность измерения частоты вращения элементов привода колес. Наиболее близким аналогом к предлагаемому техническому решению является система управления блокировками дифференциалов колесной машины, содержащая электронный блок управления, датчик скорости движения колесной машины, электропневмоклапаны,датчики скоростей вращения, датчики блокировки дифференциалов и индикаторные лампы,причем датчики скоростей вращения установлены в ступицах колес 2. Точность измерения угловых скоростей вращения ведущих колес данной системы повышается за счет применения роторов датчиков скоростей вращения колес данной системы с большим числом зубьев. В случае движения колесной машины со скоростью ниже заданной пороговой величины электронный блок управления активизирует соответствующий электропневмоклапан,который подает сжатый воздух из ресивера по трубопроводам в пневмоцилиндры механизмов блокировки дифференциалов, которые блокируют соответствующие дифференциалы. По истечении заданного промежутка времени электронный блок управления прекращает управляющий сигнал на электропневмоклапан. Управляющий сигнал на электропневмоклапан прекращается также при достижении скорости движения колесной машины заданной пороговой величины, определяемой датчиком скорости движения. При этом давление в пневмоцилиндре механизма блокировки дифференциала падает и дифференциал разблокируется, и сигналы от датчиков скоростей вращения снова начинают поступать и обрабатываться в электронном блоке управления. Недостатком данной системы управления блокировками дифференциалов колесных машин является повышенная сложность элементной базы. Предлагаемая полезная модель направлена на решение задачи упрощения элементной базы системы управления блокировкой дифференциалов колесной машины. Решение поставленной задачи достигается тем, что система управления блокировками дифференциалов колесных машин содержит электронный блок управления, электропнев 2 41892008.02.28 моклапаны, датчики скоростей вращения, датчики блокировки дифференциалов и индикаторные лампы, причем, согласно техническому решению, датчики вращения ведущих колес одновременно служат в качестве датчика скорости движения колесной машины, при этом скорость движения колесной машины определяется как произведение скорости вращения ведущего колеса, имеющего наименьшую скорость вращения, снимаемую с соответствующего датчика этого колеса, на радиус его качения. Такое исполнение системы управления блокировками дифференциалов позволяет упростить элементную базу при сохранении функциональных свойств системы. Сущность полезной модели поясняется принципиальной схемой системы управления блокировками дифференциалов, приведенной на чертеже. Система управления блокировками дифференциалов содержит электронный блок управления 1, механизмы 2 блокировки дифференциалов 3 с пневмоцилиндрами 4, ресивер 5, электропневмоклапаны 6 по числу управляемых дифференциалов, трубопроводы 7,датчики 8 скоростей вращения колес 9, датчики 10 блокировки дифференциалов 3 и индикаторные лампы 11. Система управления блокировками дифференциалов работает следующим образом. Сигналы от датчиков 8 скоростей вращения колес 9 поступают в электронный блок управления 1, где они обрабатываются и сопоставляются с заданными пороговыми величинами отношений угловых скоростей вращения колес. При движении колесной машины показания датчика 8 скорости вращения ведущих колес 9, имеющего в данный текущий момент времени наименьшую скорость вращения,умножаются электронным блоком управления 1 на радиус качения, и полученное значение, соответствующее скорости движения колесной машины, соотносится с заданной пороговой величиной. В случае движения колесной машины со скоростью ниже заданной пороговой величины поступательной скорости движения машины и превышения отношений действительных угловых скоростей вращения колес 9, соответствующих заданных пороговых величин отношений скоростей вращения колес 9, электронный блок управления 1 активизирует соответствующий электропневмоклапан 6. Электропневмоклапан 6 подает сжатый воздух из ресивера 5 по трубопроводам 7 в пневмоцилиндры 4 механизмов блокировки 2 дифференциалов 3. Механизмы блокировки 2 дифференциалов 3 блокируют соответствующие дифференциалы, в результате чего повышаются проходимость и тягово-скоростные свойства колесной машины. При этом датчик 10 заблокированного дифференциала 3 замыкается и включает индикаторную лампу 11 на щитке приборов водителя колесной машины. По истечении заданного промежутка (заданных промежутков) времени электронный блок управления 1 прекращает управляющий сигнал на электропневмоклапан 6. Электропневмоклапан 6 закрывается и соединяет трубопровод 7 пневмоцилиндра 4 механизма блокировки 2 заблокированного дифференциала с атмосферой. При этом давление в пневмоцилиндре 4 механизма блокировки 2 дифференциала 3 падает и дифференциал 3 разблокируется. После разблокирования дифференциала 3 сигналы от датчиков 8 скоростей вращения колес 9 снова начинают поступать и обрабатываться в электронном блоке управления 1. Алгоритм действий системы повторяется. Таким образом, предлагаемое исполнение системы управления блокировками дифференциалов позволяет упростить элементную базу при сохранении функциональных свойств системы. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: B60K 17/00
Метки: управления, блокировками, дифференциалов, машины, система, колесной
Код ссылки
<a href="https://by.patents.su/3-u4189-sistema-upravleniya-blokirovkami-differencialov-kolesnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Система управления блокировками дифференциалов колесной машины</a>
Система управления блокировками дифференциалов колесной машины
Номер патента: U 3413
Опубликовано: 30.04.2007
Авторы: Белоус Михаил Михайлович, Чернин Михаил Абрамович, Высоцкий Михаил Степанович, Лабецкий Леонид Николаевич, Дубовик Дмитрий Александрович
МПК: B60K 17/00
Метки: машины, система, колесной, управления, блокировками, дифференциалов
Текст:
...управления выдается сигнал на подвод сжатого воздуха из ресивера к механизмам блокировки, в результате чего осуществляется блокировка дифференциала. Недостатком данной системы управления блокировками дифференциалов является недостаточно высокая точность измерения частоты вращения элементов привода колес. Предлагаемая полезная модель направлена на решение задачи повышения точности измерения угловых скоростей вращения ведущих колес за счет...
Стенд для испытаний дифференциалов
Номер патента: U 3551
Опубликовано: 30.06.2007
Авторы: Мелешко Михаил Григорьевич, Амельченко Петр Адамович, Ермаленок Валерий Генрихович, Дубовик Дмитрий Александрович, Еловой Олег Михайлович, Стасилевич Андрей Григорьевич, Высоцкий Михаил Степанович
МПК: G01M 17/00
Метки: стенд, дифференциалов, испытаний
Текст:
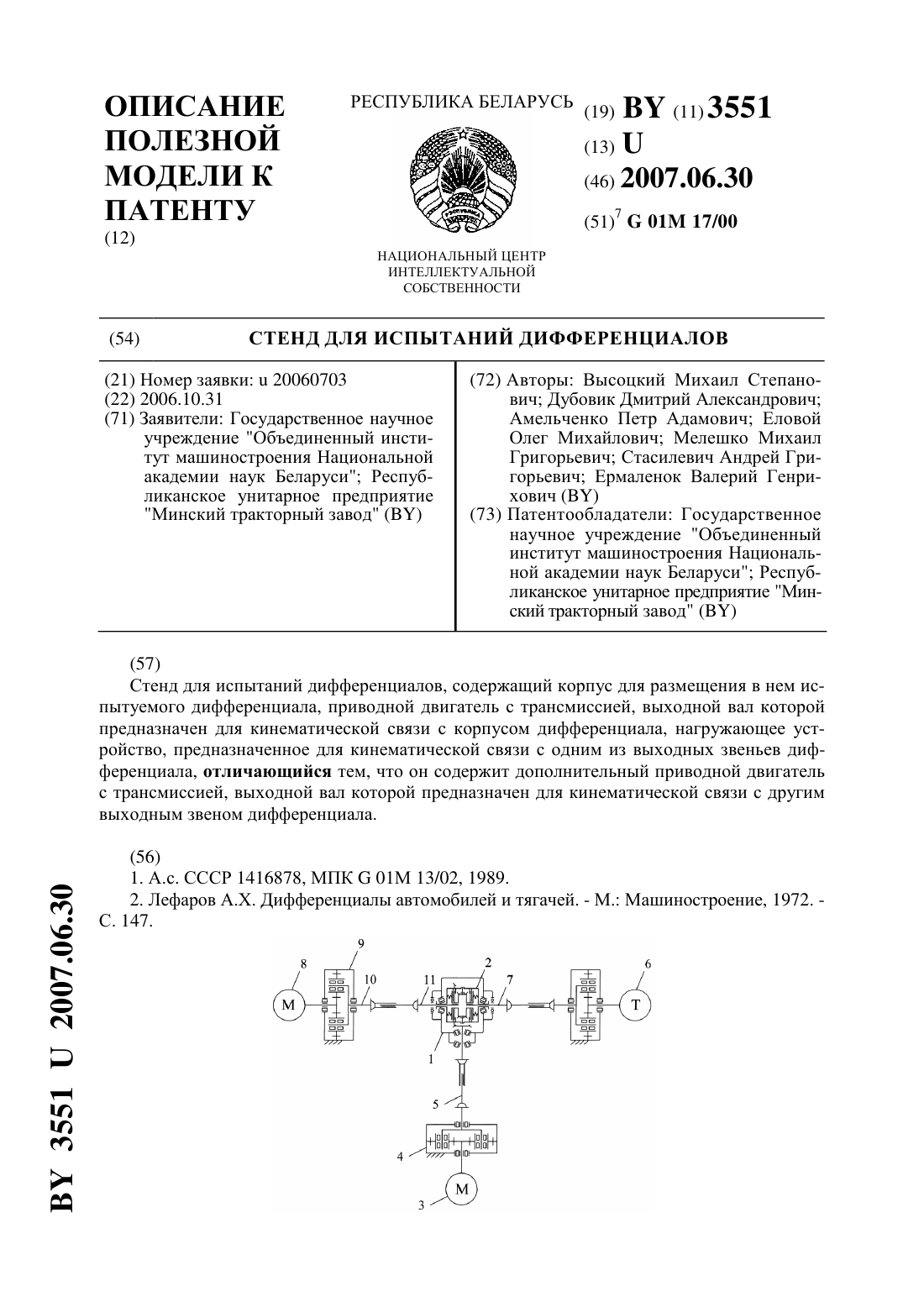
...динамометра, обеспечивающих измерение крутящего момента на выходных звеньях дифференциала 2. Стенд позволяет определять рабочую характеристику дифференциалов при остановленном одном из его выходных звеньев. Недостатком стенда является то, что испытания осуществляются при остановленном одном из выходных звеньев дифференциалов, что не соответствует основным режимам нагружения дифференциалов при эксплуатации их в составе мобильных машин....
Способ управления дифференциалами многоприводных колесных машин
Номер патента: 10163
Опубликовано: 30.12.2007
Авторы: Чернин Михаил Абрамович, Белоус Михаил Михайлович, Высоцкий Михаил Степанович, Лабецкий Леонид Николаевич, Дубовик Дмитрий Александрович
МПК: F16H 48/00, B60K 17/16, B60K 17/34...
Метки: колесных, машин, многоприводных, способ, управления, дифференциалами
Текст:
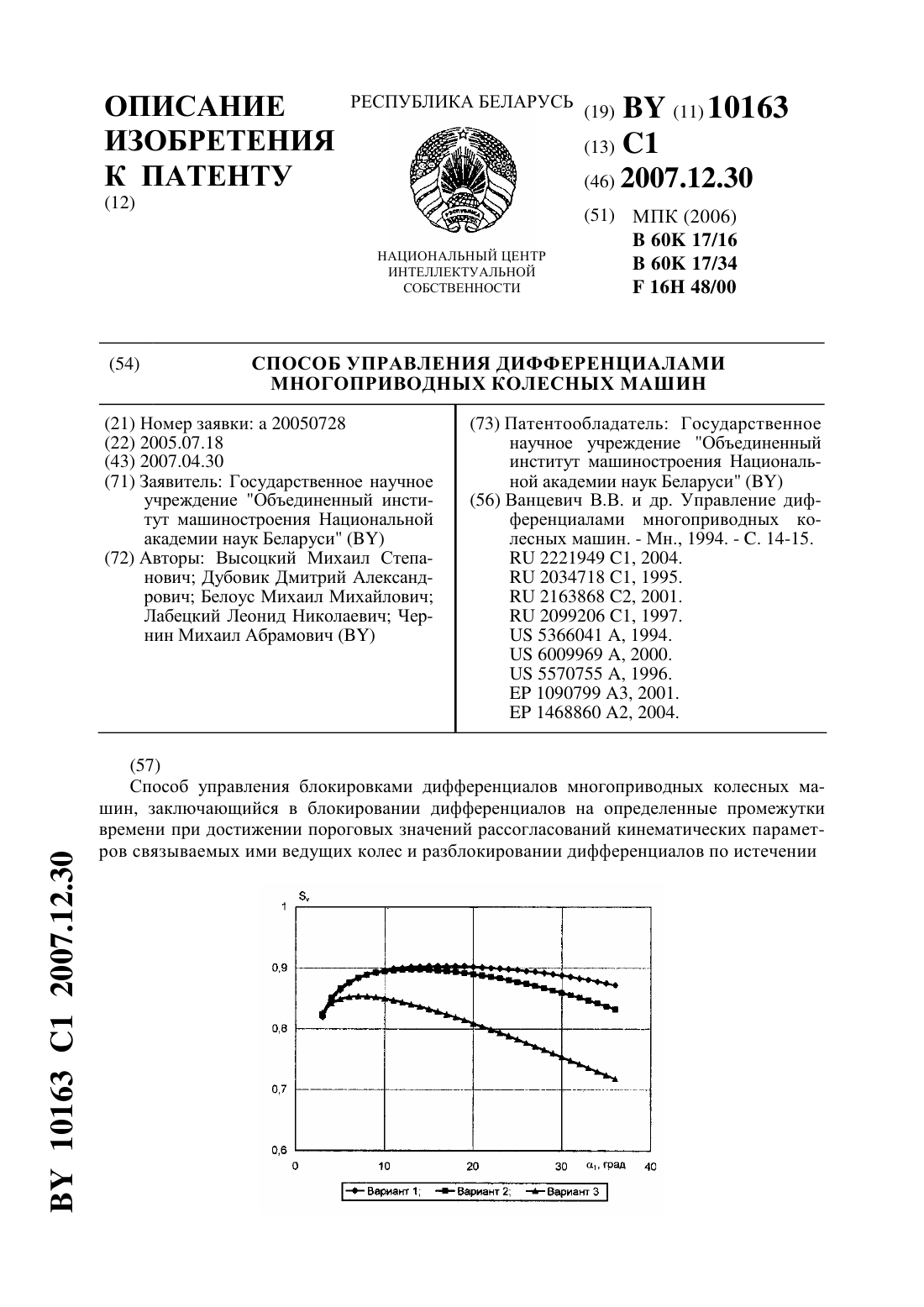
...ее показателя. Недостатком этого способа является узкий рабочий диапазон системы регулирования тяговых усилий, ограничиваемый условиями обеспечения удовлетворительной управляемости многоприводной колесной машины. Задачей настоящего изобретения является увеличение рабочего диапазона построенной на основе управления дифференциалами системы регулирования тяговых усилий, исключающей пробуксовку отдельных ведущих мостов и колес при плохих...
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Коробкин Владимир Андреевич, Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович, Андрияненко Юрий Анатольевич
МПК: B65K 41/00
Метки: мобильной, энергетическими, машины, адаптивного, управления, интеллектуального, система, режимами
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...
Система управления положением корпуса гусеничной машины
Номер патента: U 552
Опубликовано: 30.06.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич, Ковалев Ярослав Никитич
МПК: B60G 17/04
Метки: корпуса, машины, гусеничной, положением, управления, система
Текст:
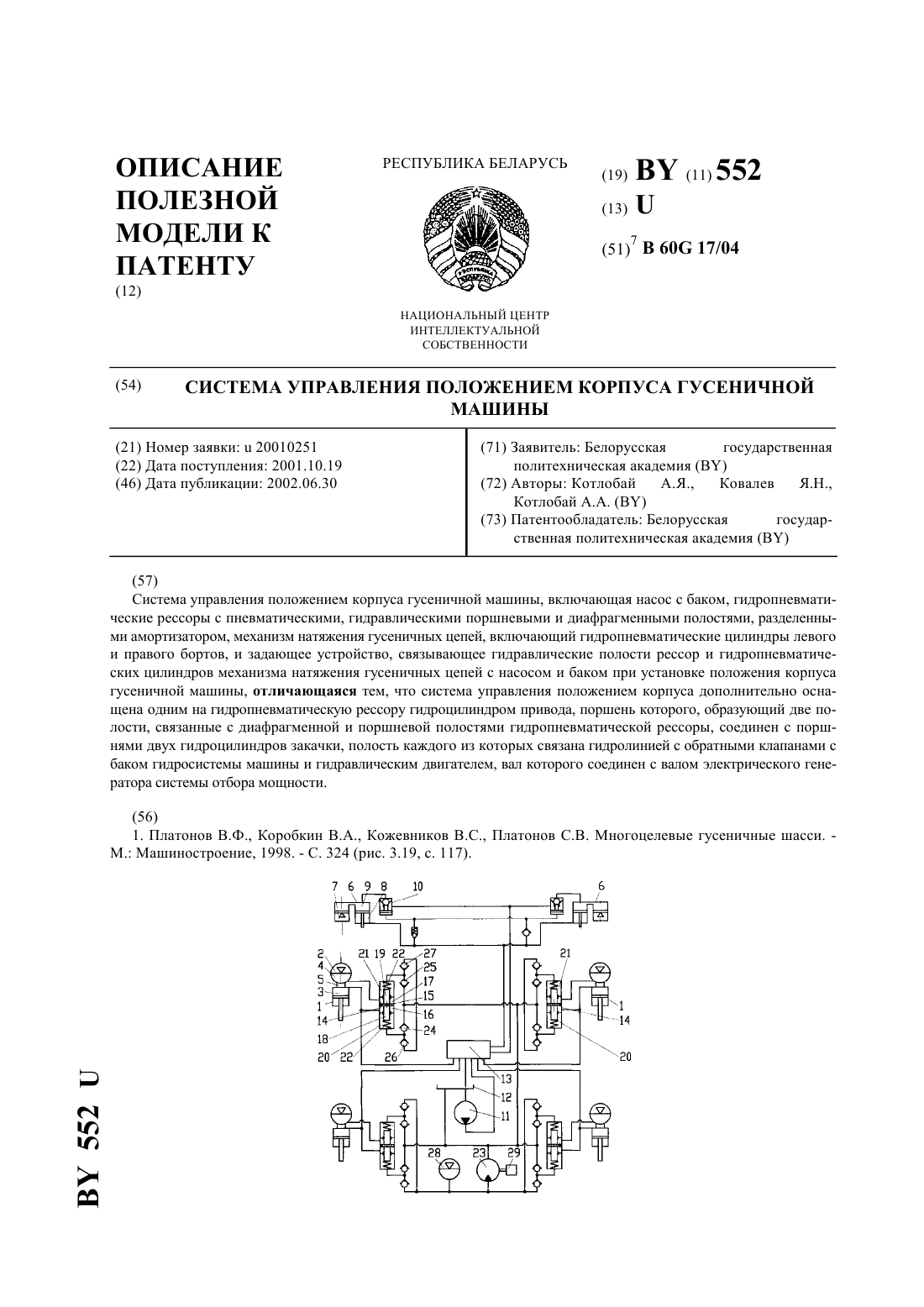
...цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 6 с пневматической 7, гидравлической штоковой 8 и поршневой 9 полостями. Поршневые полости 9 заперты гидрозамками 10. Гидравлические полости 3, 4 гидропневматических рессор 1, 8 гидропневматического цилиндра 6, напорные полости гидрозамков 10 связаны с насосом 11 и баком 12...
Предыдущий патент: Комплект упаковки для пищевых продуктов
Следующий патент: Разделительный дорожный блок
Случайный патент: Производные фосфолипидов, способ их получения, фармацевтическая композиция на их основе, способ получения фармацевтической композиции