Способ управления дифференциалами многоприводных колесных машин
Номер патента: 10163
Опубликовано: 30.12.2007
Авторы: Белоус Михаил Михайлович, Лабецкий Леонид Николаевич, Дубовик Дмитрий Александрович, Чернин Михаил Абрамович, Высоцкий Михаил Степанович
Текст
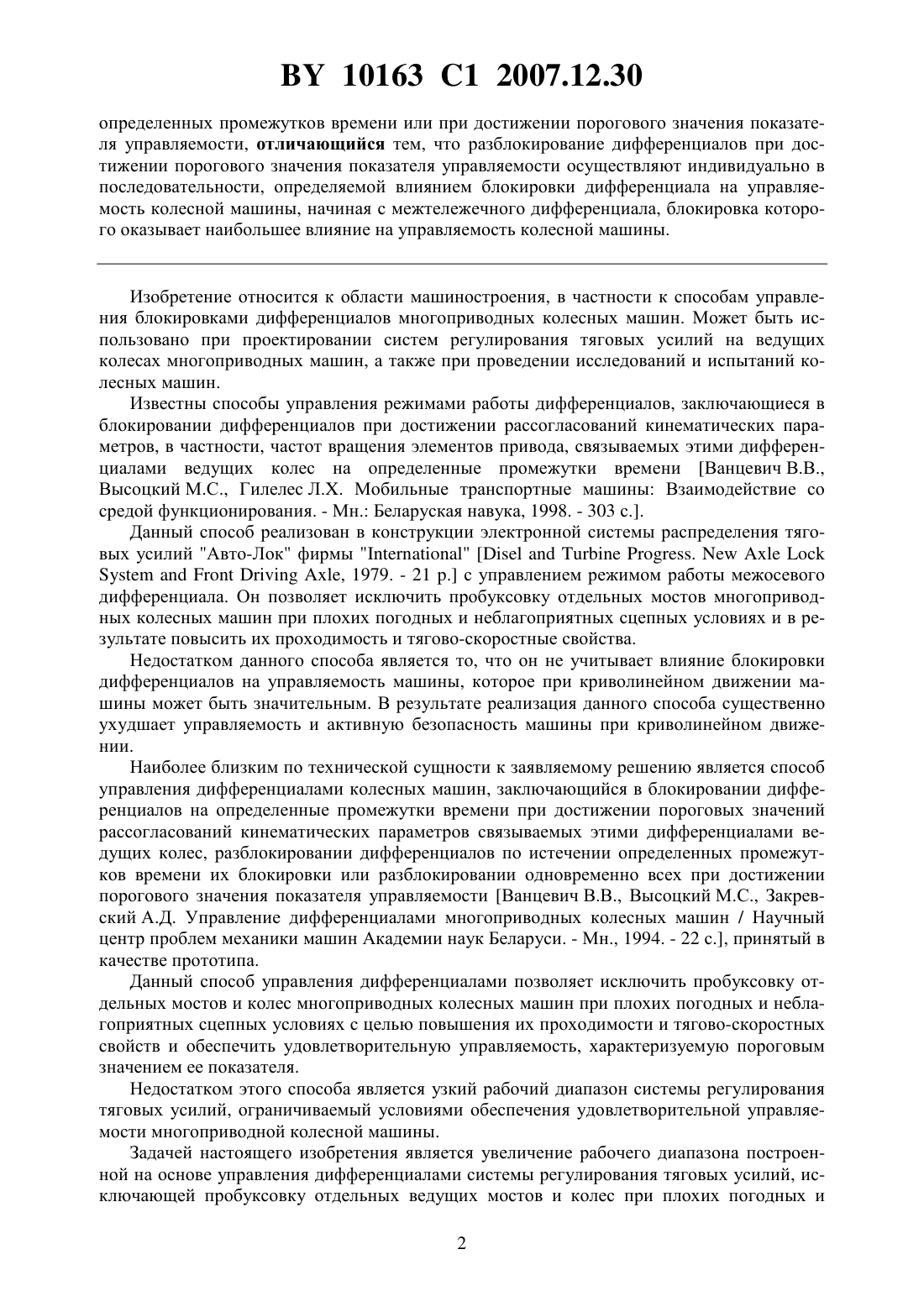
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛАМИ МНОГОПРИВОДНЫХ КОЛЕСНЫХ МАШИН(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Высоцкий Михаил Степанович Дубовик Дмитрий Александрович Белоус Михаил Михайлович Лабецкий Леонид Николаевич Чернин Михаил Абрамович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(56) Ванцевич В.В. и др. Управление дифференциалами многоприводных колесных машин. - Мн., 1994. - . 14-15.2221949 1, 2004.2034718 1, 1995.2163868 2, 2001.2099206 1, 1997.5366041 , 1994.6009969 , 2000.5570755 , 1996.1090799 3, 2001.1468860 2, 2004.(57) Способ управления блокировками дифференциалов многоприводных колесных машин, заключающийся в блокировании дифференциалов на определенные промежутки времени при достижении пороговых значений рассогласований кинематических параметров связываемых ими ведущих колес и разблокировании дифференциалов по истечении 10163 1 2007.12.30 определенных промежутков времени или при достижении порогового значения показателя управляемости, отличающийся тем, что разблокирование дифференциалов при достижении порогового значения показателя управляемости осуществляют индивидуально в последовательности, определяемой влиянием блокировки дифференциала на управляемость колесной машины, начиная с межтележечного дифференциала, блокировка которого оказывает наибольшее влияние на управляемость колесной машины. Изобретение относится к области машиностроения, в частности к способам управления блокировками дифференциалов многоприводных колесных машин. Может быть использовано при проектировании систем регулирования тяговых усилий на ведущих колесах многоприводных машин, а также при проведении исследований и испытаний колесных машин. Известны способы управления режимами работы дифференциалов, заключающиеся в блокировании дифференциалов при достижении рассогласований кинематических параметров, в частности, частот вращения элементов привода, связываемых этими дифференциалами ведущих колес на определенные промежутки времени Ванцевич В.В.,Высоцкий М.С., Гилелес Л Мобильные транспортные машины Взаимодействие со средой функционирования. - Мн. Беларуская навука, 1998. - 303 с Данный способ реализован в конструкции электронной системы распределения тяговых усилий Авто-Лок фирмы., 1979. - 21 . с управлением режимом работы межосевого дифференциала. Он позволяет исключить пробуксовку отдельных мостов многоприводных колесных машин при плохих погодных и неблагоприятных сцепных условиях и в результате повысить их проходимость и тягово-скоростные свойства. Недостатком данного способа является то, что он не учитывает влияние блокировки дифференциалов на управляемость машины, которое при криволинейном движении машины может быть значительным. В результате реализация данного способа существенно ухудшает управляемость и активную безопасность машины при криволинейном движении. Наиболее близким по технической сущности к заявляемому решению является способ управления дифференциалами колесных машин, заключающийся в блокировании дифференциалов на определенные промежутки времени при достижении пороговых значений рассогласований кинематических параметров связываемых этими дифференциалами ведущих колес, разблокировании дифференциалов по истечении определенных промежутков времени их блокировки или разблокировании одновременно всех при достижении порогового значения показателя управляемости Ванцевич В.В., Высоцкий М.С., Закревский А.Д. Управление дифференциалами многоприводных колесных машин / Научный центр проблем механики машин Академии наук Беларуси. - Мн., 1994. - 22 с., принятый в качестве прототипа. Данный способ управления дифференциалами позволяет исключить пробуксовку отдельных мостов и колес многоприводных колесных машин при плохих погодных и неблагоприятных сцепных условиях с целью повышения их проходимости и тягово-скоростных свойств и обеспечить удовлетворительную управляемость, характеризуемую пороговым значением ее показателя. Недостатком этого способа является узкий рабочий диапазон системы регулирования тяговых усилий, ограничиваемый условиями обеспечения удовлетворительной управляемости многоприводной колесной машины. Задачей настоящего изобретения является увеличение рабочего диапазона построенной на основе управления дифференциалами системы регулирования тяговых усилий, исключающей пробуксовку отдельных ведущих мостов и колес при плохих погодных и 2 10163 1 2007.12.30 неблагоприятных сцепных условиях с целью повышения проходимости и тяговоскоростных свойств и обеспечивающей требуемую управляемость многоприводных колесных машин. Решение поставленной задачи достигается в способе управления блокировками дифференциалов многоприводных колесных машин, заключающемся в блокировании дифференциалов на определенные промежутки времени при достижении пороговых значений рассогласований кинематических параметров связываемых ими ведущих колес и разблокировании дифференциалов по истечении определенных промежутков времени или при достижении порогового значения показателя управляемости, причем, согласно техническому решению, разблокирование дифференциалов при достижении порогового значения показателя управляемости осуществляют индивидуально в последовательности, определяемой влиянием блокировки дифференциала на управляемость колесной машины, начиная с межтележечного дифференциала, блокировка которого оказывает наибольшее влияние на управляемость колесной машины. Заявляемый способ позволяет расширить рабочий диапазон системы регулирования тяговых усилий, построенной на основе управления дифференциалами, за счет разблокирования отдельных дифференциалов, блокировка которых оказывает наибольшее влияние на управляемость машины, при достижении пороговых значений показателя управляемости и управлении дифференциалами, блокировка которых оказывает незначительное влияние на управляемость. Пример реализации способа. Заявляемый способ оценивался расчетным методом в качестве алгоритмического обеспечения системы регулирования тяговых усилий многоприводной колесной машины МЗКТ-79091 с колесной формулой 88, построенной на управлении межосевыми дифференциалами передней и задней тележки и межтележечным дифференциалом. На фигуре приведена графическая зависимость показателя управляемости машины МЗКТ-79091 от угла поворота внутреннего колеса первого моста при возможных вариантах состояния управляемых дифференциалов. В качестве показателя управляемости использован следующий показатель, где- показатель управляемости колесных машин Ванцевич В.В., Высоцкий М.С., Дубовик Д.А. Регулирование мощности в движителе как средство управления динамикой колесных машин // Автомобильная промышленность. - 2004. -1. - С. 13-16- кривизна траектории движения машины при нейтральной поворачиваемости, м-1- кривизна действительной траектории при движении машины, м-1. При выборе в качестве порогового значения показателя управляемости экстремального (максимального) значения показателя управляемости при блокировании всех управляемых дифференциалов (в передней и задней тележках и в раздаточной коробке), равного 0,85, рабочий диапазон системы регулирования тяговых усилий, построенный на основе способа управления дифференциалами, принятого в качестве прототипа, составит 7 градусов поворота внутреннего колеса первого моста. При построении системы регулирования тяговых усилий на основе заявляемого способа при достижении значения показателя управляемости, равного 0,85, разблокируется только дифференциал в раздаточной коробке, а дифференциалы в передней и задней тележке остаются в заблокированном состоянии. В соответствии с текущими условиями эксплуатации машины управление будет осуществляться дифференциалами в передней и задней тележке. При этом рабочий диапазон системы регулирования тяговых усилий,обеспечивающий требуемую управляемость машины, составит 31 градус поворота внутреннего колеса первого моста.1 10163 1 2007.12.30 Следовательно, при реализации предлагаемого способа управления дифференциалами многоприводных колесных машин рабочий диапазон системы регулирования тяговых усилий увеличится на 24 градуса при левом и правом повороте машины. Таким образом, заявляемый способ управления блокировками дифференциалов позволяет значительно расширить рабочий диапазон систем регулирования тяговых усилий на ведущих колесах для повышения проходимости и тягово-скоростных свойств при обеспечении требуемой управляемости многоприводных колесных машин. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: F16H 48/00, B60K 17/34, B60K 17/16
Метки: колесных, многоприводных, управления, машин, дифференциалами, способ
Код ссылки
<a href="https://by.patents.su/4-10163-sposob-upravleniya-differencialami-mnogoprivodnyh-kolesnyh-mashin.html" rel="bookmark" title="База патентов Беларуси">Способ управления дифференциалами многоприводных колесных машин</a>
Способ испытания управляемости колесных машин
Номер патента: 8385
Опубликовано: 30.08.2006
Автор: Дубовик Дмитрий Александрович
МПК: G01M 17/00
Метки: колесных, испытания, управляемости, способ, машин
Текст:
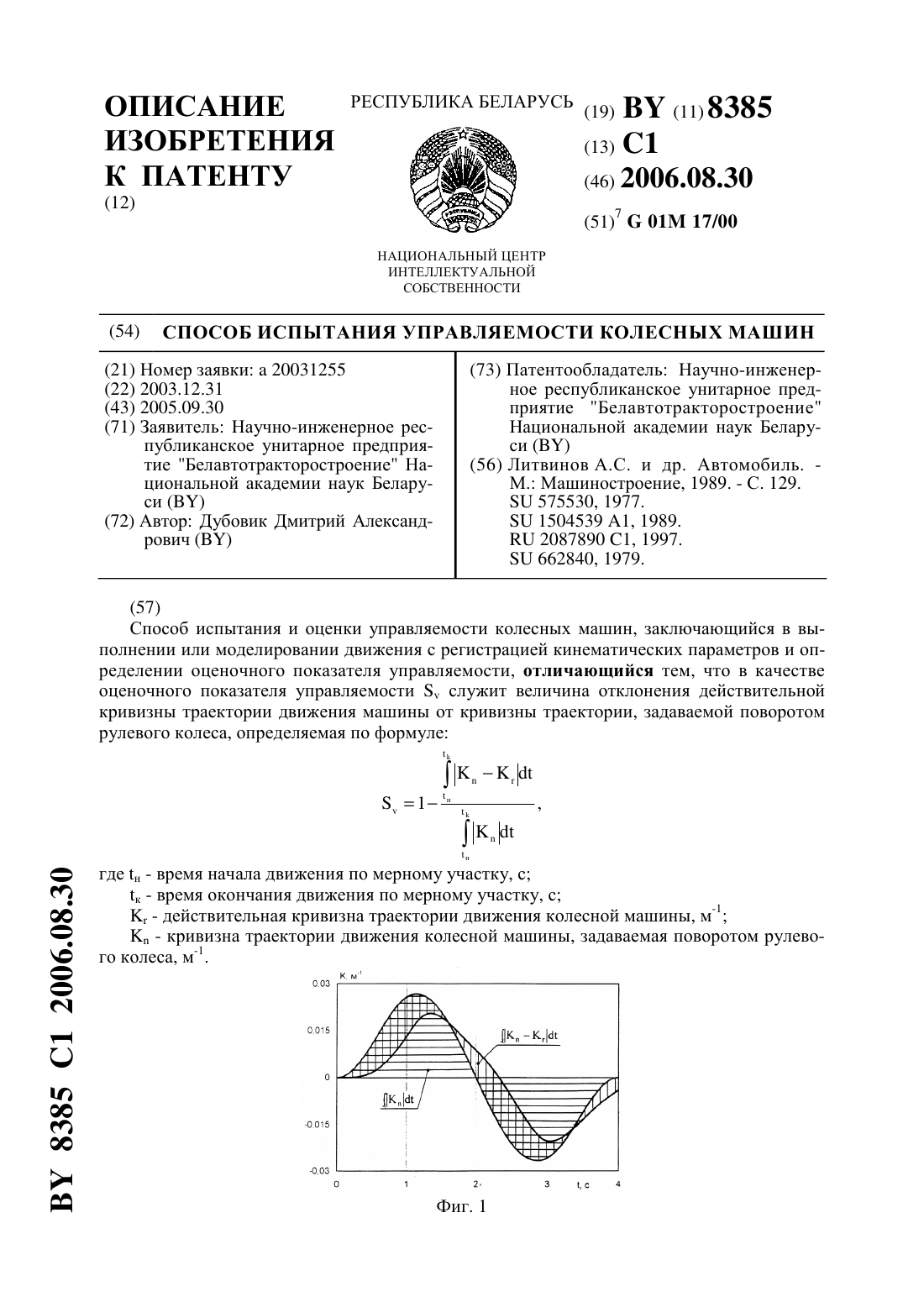
...движения,скорость рыскания, боковое ускорение, угол поворота рулевого колеса и т.п.) и определении оценочного показателя управляемости, причем, согласно изобретению, в качестве оценочного показателя управляемостислужит величина отклонения действительной кривизны траектории движения машины от кривизны траектории, задаваемой поворотом рулевого колеса, определяемая по формуле к где-оценочный показатель управляемости н - время начала движения...
Способ управления движением колесных машин

Номер патента: 5929
Опубликовано: 30.03.2004
Автор: Сазонов Игорь Сергеевич
МПК: B60K 41/00
Метки: машин, колесных, движением, управления, способ
Текст:
...известными методами непрерывную регистрацию сигналов, пропорциональных фактически реализуемым усилиям колесами с опорной поверхностью, нормальных реакций и боковых усилий. Сигналы от датчиков 6 и 7 по каналам 12 поступают в блок обработки информации 13, который производит обработку поступающей информации и формирование сигналов управления для блока управления 14 исполнительными механизмами двигателя 8, главным распределительным...
Способ оценки эффективности ходовых систем колесных машин
Номер патента: 9953
Опубликовано: 30.10.2007
Автор: Дубовик Дмитрий Александрович
МПК: G01M 17/00, G01M 17/007
Метки: оценки, машин, систем, эффективности, способ, колесных, ходовых
Текст:
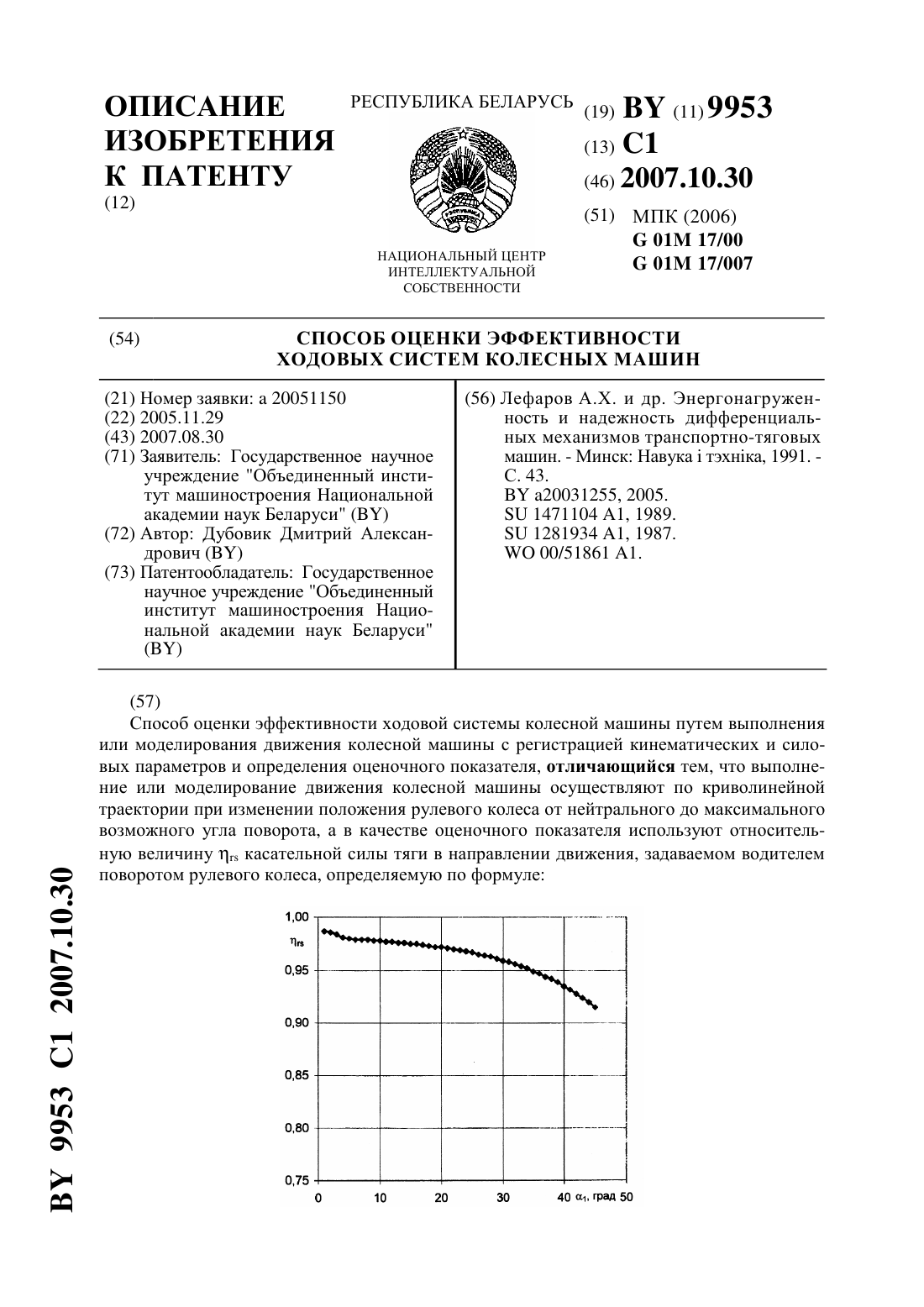
...силы тяги на ведущих колесах -го моста, Н/и- буксования ведущих колес -го моста. Данный способ позволяет оценить энергетическую эффективность ходовых систем колесных машин с позиции выполнения ими как тяговых, так и транспортных работ, или же при совмещении последних. Недостатком этого способа является то, что он не учитывает потери мощности, обусловленные несовершенством конструкции ходовых систем и связанные с отклонением...
Дифференциал свободного хода для колесных машин
Номер патента: U 2608
Опубликовано: 30.04.2006
Авторы: Высоцкий Михаил Степанович, Дубовик Дмитрий Александрович
МПК: F16H 48/20
Метки: машин, колесных, дифференциал, свободного, хода
Текст:
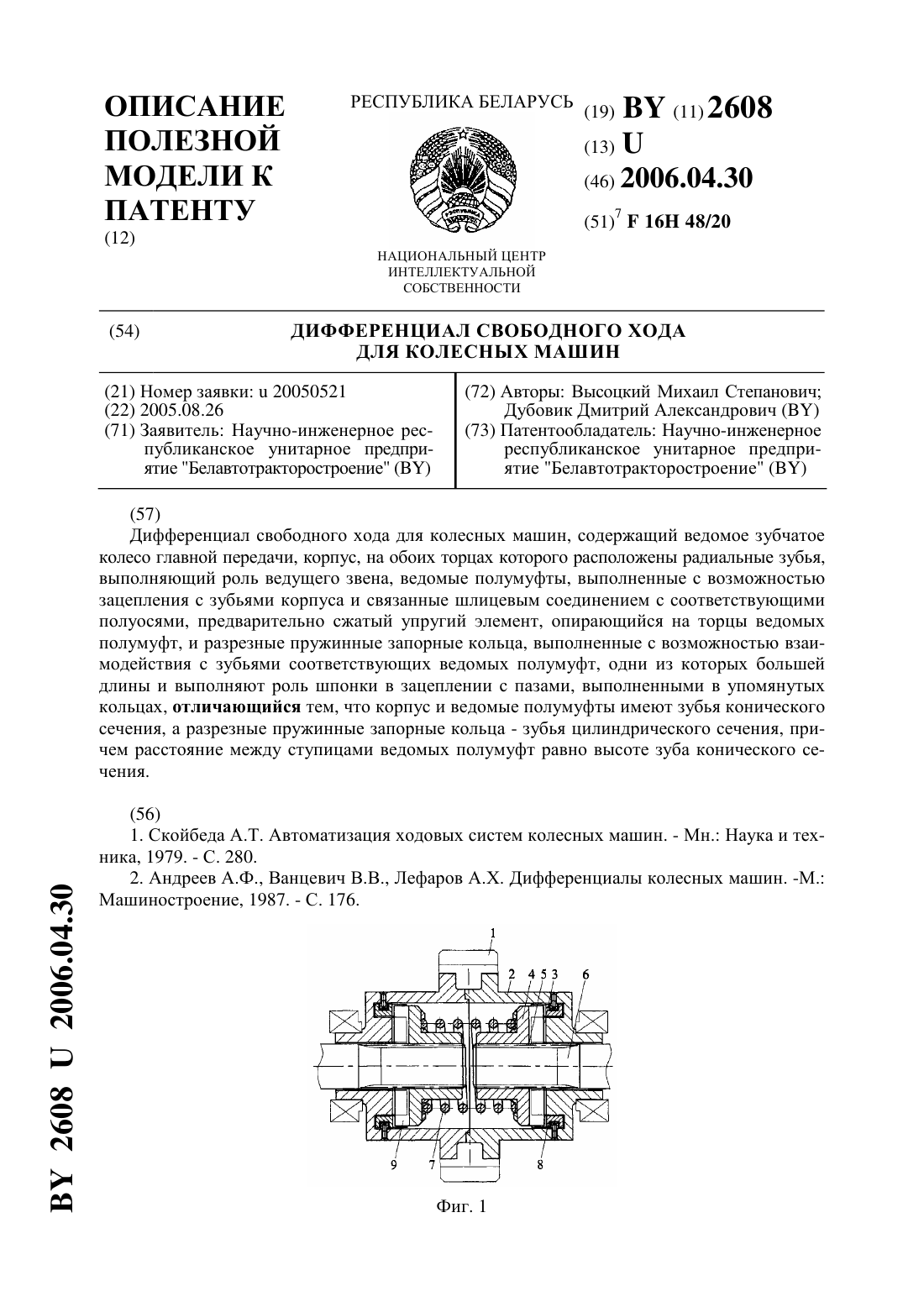
...корпуса и связанные шлицевым соединением с соответствующими полуосями, предварительно сжатый упругий элемент, опирающийся на торцы ведомых полумуфт, и разрезные пружинные запорные кольца, взаимодействующие с зубьями соответствующих ведомых полумуфт, одни из которых большей длины и выполняют роль шпонки в зацеплении с пазами, выполненны 2 26082006.04.30 ми в упомянутых кольцах, причем, согласно техническому решению, взаимодействие корпуса с...
Дифференциал свободного хода для колесных машин
Номер патента: U 2436
Опубликовано: 28.02.2006
Авторы: Брижанев Владимир Михайлович, Дубовик Дмитрий Александрович, Максимов Сергей Михайлович, Высоцкий Михаил Степанович, Николаев Юрий Иванович
МПК: F16H 48/20
Метки: колесных, свободного, машин, дифференциал, хода
Текст:
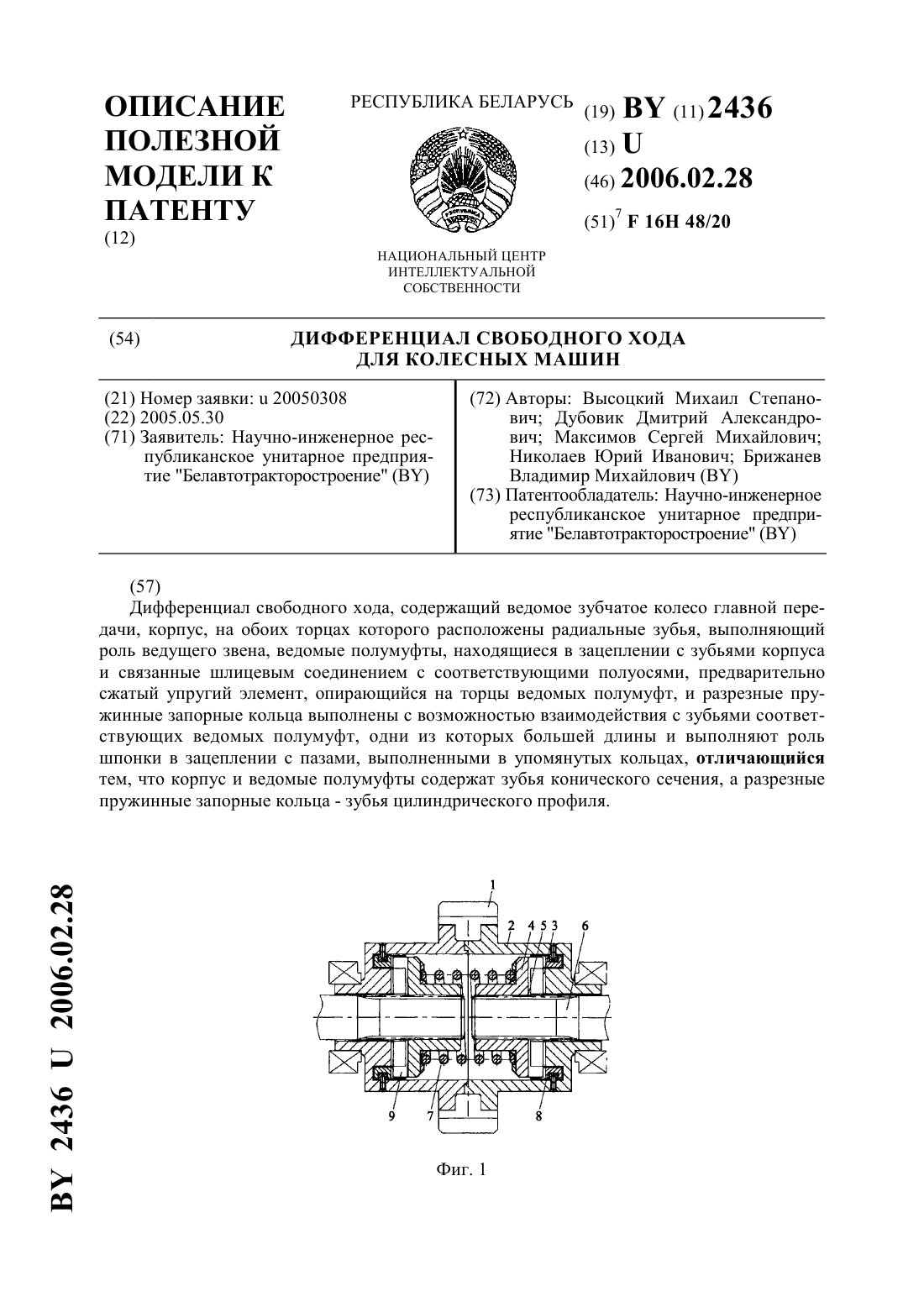
...поставленной задачи достигается тем, что дифференциал свободного хода содержит ведомое зубчатое колесо главной передачи, корпус, на обоих торцах которого расположены радиальные зубья, выполняющий роль ведущего звена, ведомые полумуфты, находящиеся в зацеплении с зубьями корпуса и связанные шлицевым соединением с соответствующими полуосями, предварительно сжатый упругий элемент, опирающийся на торцы ведомых полумуфт, и разрезные пружинные...
Предыдущий патент: Способ измерения механической силы, приложенной к элементу, обладающему магнитоупругим эффектом
Следующий патент: Рулевая колонка транспортного средства
Случайный патент: Гербицидное средство