Система управления блокировками дифференциалов колесной машины
Номер патента: U 3413
Опубликовано: 30.04.2007
Авторы: Дубовик Дмитрий Александрович, Чернин Михаил Абрамович, Лабецкий Леонид Николаевич, Высоцкий Михаил Степанович, Белоус Михаил Михайлович
Текст
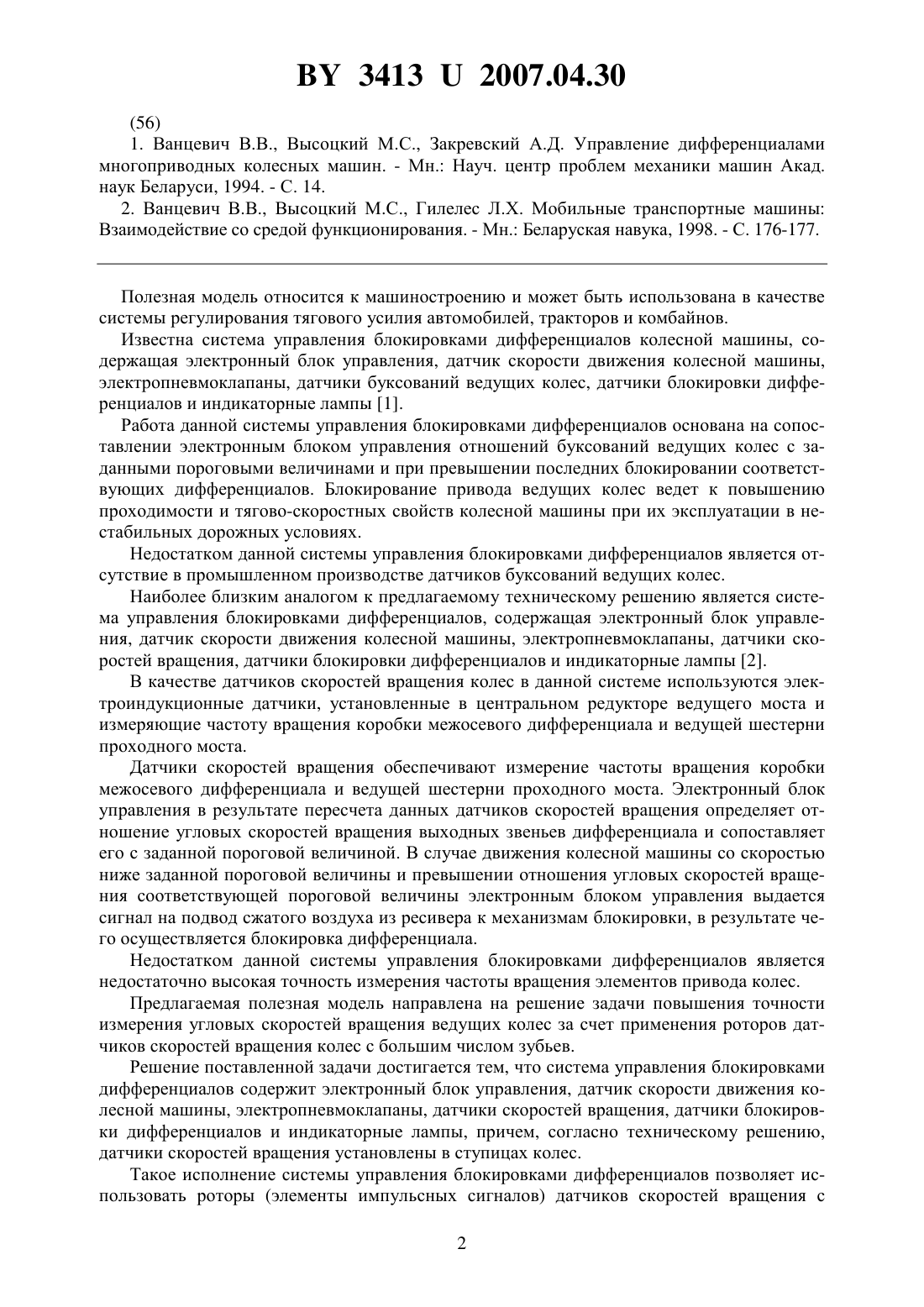
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА УПРАВЛЕНИЯ БЛОКИРОВКАМИ ДИФФЕРЕНЦИАЛОВ КОЛЕСНОЙ МАШИНЫ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Высоцкий Михаил Степанович Дубовик Дмитрий Александрович Белоус Михаил Михайлович Лабецкий Леонид Николаевич Чернин Михаил Абрамович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Система управления блокировками дифференциалов колесной машины, содержащая электронный блок управления, датчик скорости движения колесной машины, электропневмоклапаны, датчики скоростей вращения ведущих колес, датчики блокировки дифференциалов и индикаторные лампы, отличающаяся тем, что датчики скоростей вращения выходных звеньев дифференциалов установлены в ступицах ведущих колес.(56) 1. Ванцевич В.В., Высоцкий М.С., Закревский А.Д. Управление дифференциалами многоприводных колесных машин. - Мн. Науч. центр проблем механики машин Акад. наук Беларуси, 1994. - С. 14. 2. Ванцевич В.В., Высоцкий М.С., Гилелес Л.Х. Мобильные транспортные машины Взаимодействие со средой функционирования. - Мн. Беларуская навука, 1998. - С. 176-177. Полезная модель относится к машиностроению и может быть использована в качестве системы регулирования тягового усилия автомобилей, тракторов и комбайнов. Известна система управления блокировками дифференциалов колесной машины, содержащая электронный блок управления, датчик скорости движения колесной машины,электропневмоклапаны, датчики буксований ведущих колес, датчики блокировки дифференциалов и индикаторные лампы 1. Работа данной системы управления блокировками дифференциалов основана на сопоставлении электронным блоком управления отношений буксований ведущих колес с заданными пороговыми величинами и при превышении последних блокировании соответствующих дифференциалов. Блокирование привода ведущих колес ведет к повышению проходимости и тягово-скоростных свойств колесной машины при их эксплуатации в нестабильных дорожных условиях. Недостатком данной системы управления блокировками дифференциалов является отсутствие в промышленном производстве датчиков буксований ведущих колес. Наиболее близким аналогом к предлагаемому техническому решению является система управления блокировками дифференциалов, содержащая электронный блок управления, датчик скорости движения колесной машины, электропневмоклапаны, датчики скоростей вращения, датчики блокировки дифференциалов и индикаторные лампы 2. В качестве датчиков скоростей вращения колес в данной системе используются электроиндукционные датчики, установленные в центральном редукторе ведущего моста и измеряющие частоту вращения коробки межосевого дифференциала и ведущей шестерни проходного моста. Датчики скоростей вращения обеспечивают измерение частоты вращения коробки межосевого дифференциала и ведущей шестерни проходного моста. Электронный блок управления в результате пересчета данных датчиков скоростей вращения определяет отношение угловых скоростей вращения выходных звеньев дифференциала и сопоставляет его с заданной пороговой величиной. В случае движения колесной машины со скоростью ниже заданной пороговой величины и превышении отношения угловых скоростей вращения соответствующей пороговой величины электронным блоком управления выдается сигнал на подвод сжатого воздуха из ресивера к механизмам блокировки, в результате чего осуществляется блокировка дифференциала. Недостатком данной системы управления блокировками дифференциалов является недостаточно высокая точность измерения частоты вращения элементов привода колес. Предлагаемая полезная модель направлена на решение задачи повышения точности измерения угловых скоростей вращения ведущих колес за счет применения роторов датчиков скоростей вращения колес с большим числом зубьев. Решение поставленной задачи достигается тем, что система управления блокировками дифференциалов содержит электронный блок управления, датчик скорости движения колесной машины, электропневмоклапаны, датчики скоростей вращения, датчики блокировки дифференциалов и индикаторные лампы, причем, согласно техническому решению,датчики скоростей вращения установлены в ступицах колес. Такое исполнение системы управления блокировками дифференциалов позволяет использовать роторы (элементы импульсных сигналов) датчиков скоростей вращения с 2 34132007.04.30 большими размерами, обеспечивающими большее число зубьев и повышенную точность измерения частоты вращения колес. Сущность полезной модели поясняется принципиальной схемой системы управления блокировками дифференциалов, приведенной на чертеже. Система управления блокировками дифференциалов содержит электронный блок управления 1, датчик скорости движения 2 колесной машины, механизмы блокировки 3 дифференциалов с пневмоцилиндрами, ресивер 4, электропневмоклапаны 5 по числу управляемых дифференциалов, трубопроводы 6, датчики скоростей вращения 7, датчики блокировки 8 дифференциалов и индикаторные лампы 9. Система управления блокировками дифференциалов работает следующим образом. Сигналы от датчика скорости движения 2 колесной машины и датчиков скоростей вращения 7 поступают в электронный блок управления 1, где они обрабатываются и сопоставляются с заданными пороговыми величинами соответственно поступательной скорости движения машины и отношений угловых скоростей вращения колес. В случае движения колесной машины со скоростью ниже заданной пороговой величины поступательной скорости движения машины и превышения отношений действительных угловых скоростей вращения колес соответствующих заданных пороговых величин отношений скоростей вращения колес, электронный блок управления 1 активизирует соответствующий электропневмоклапан 5. Электровневмоклапан 5 подает сжатый воздух из ресивера 4 по трубопроводам 6 в пневмоцилиндры механизмов блокировки 3 дифференциалов. Механизмы блокировки 3 дифференциалов блокируют соответствующие дифференциалы, в результате чего повышается проходимость и тягово-скоростные свойства колесной машины. При этом датчик блокировки 8 заблокированного дифференциала замыкается и включает индикаторную лампу 9 на щитке приборов водителя (не показана) колесной машины. По истечении заданного промежутка (заданных промежутков) времени электронный блок управления 1 прекращает управляющий сигнал на электропневмоклапан 5. Электропневмоклапан 5 закрывается и соединяет трубопровод 6 пневмоцилиндра механизма блокировки 3 заблокированного дифференциала с атмосферой. При этом давление в пневмоцилиндре механизма блокировки 3 дифференциала падает и дифференциал разблокируется. После разблокирования дифференциала сигналы от датчиков скоростей вращения 7 снова начинают поступать и обрабатываться в электронном блоке управления 1. Алгоритм действий системы повторяется. Таким образом, предлагаемое исполнение системы управления блокировками дифференциалов позволяет повысить точность измерения частоты вращения колес, эффективность управления приводом ведущих колес и эксплуатации колесных машин в целом. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: B60K 17/00
Метки: блокировками, управления, система, дифференциалов, колесной, машины
Код ссылки
<a href="https://by.patents.su/3-u3413-sistema-upravleniya-blokirovkami-differencialov-kolesnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Система управления блокировками дифференциалов колесной машины</a>
Тормозная система транспортного средства
Номер патента: U 823
Опубликовано: 30.03.2003
Авторы: Мазаник Константин Игоревич, Богдан Николай Владимирович (умерший), Сафонов Андрей Иванович
Метки: система, тормозная, транспортного, средства
Текст:
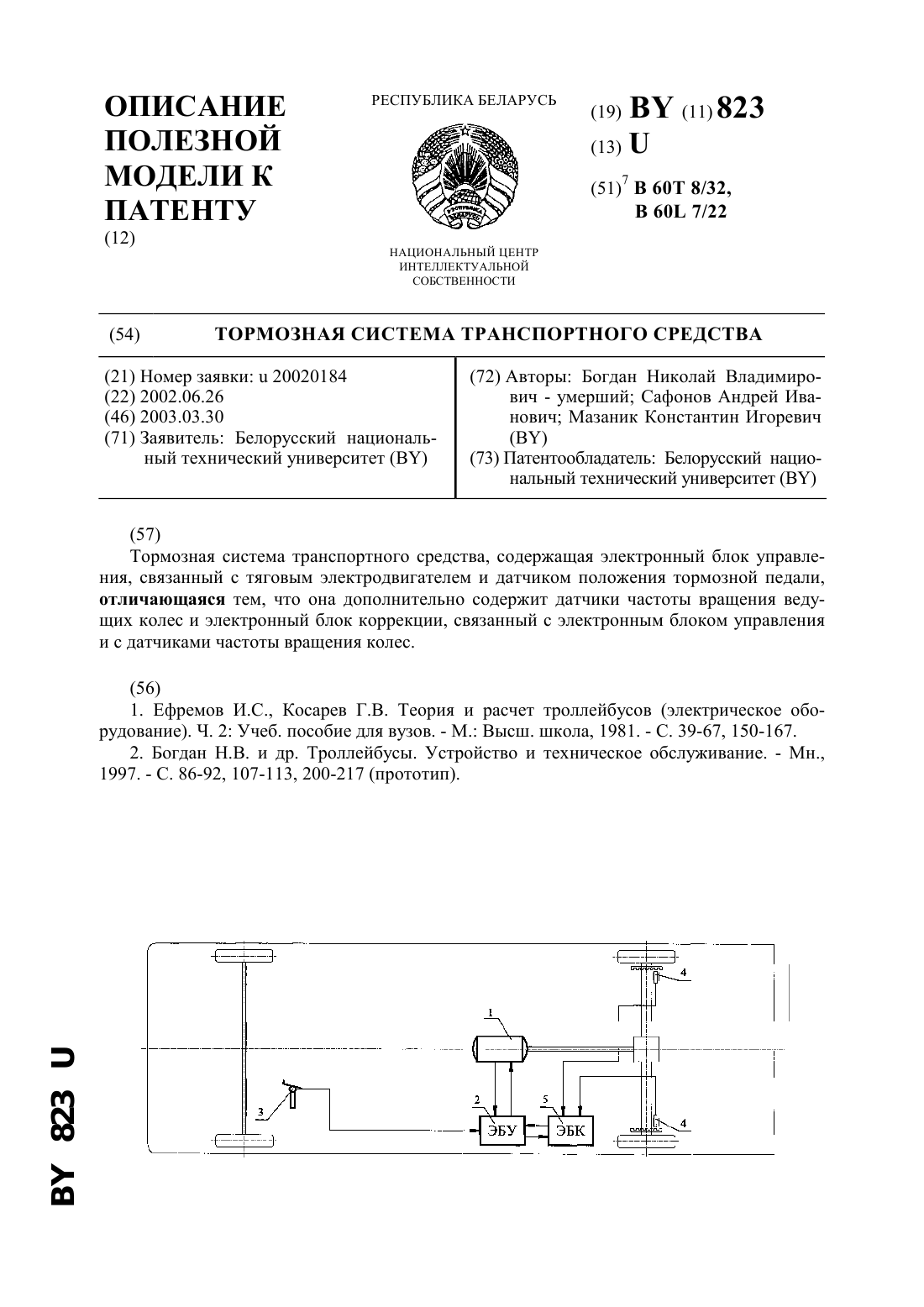
...и датчиком положения тормозной педали, дополнительно содержит датчики частоты вращения ведущих колес и электронный блок коррекции, связанный с электронным блоком управления и с датчиками частоты вращения колес. На чертеже изображена схема тормозной системы транспортного средства. Система содержит тяговый электродвигатель 1, передающий вращающий момент на колеса ведущего моста. Электронный блок 2 управления связан с тяговым электродвигателем...
Антиблокировочная тормозная система
Номер патента: U 1287
Опубликовано: 30.03.2004
Авторы: Иванов Валентин Георгиевич, Михальцевич Николай Романович
МПК: B60T 8/00
Метки: антиблокировочная, тормозная, система
Текст:
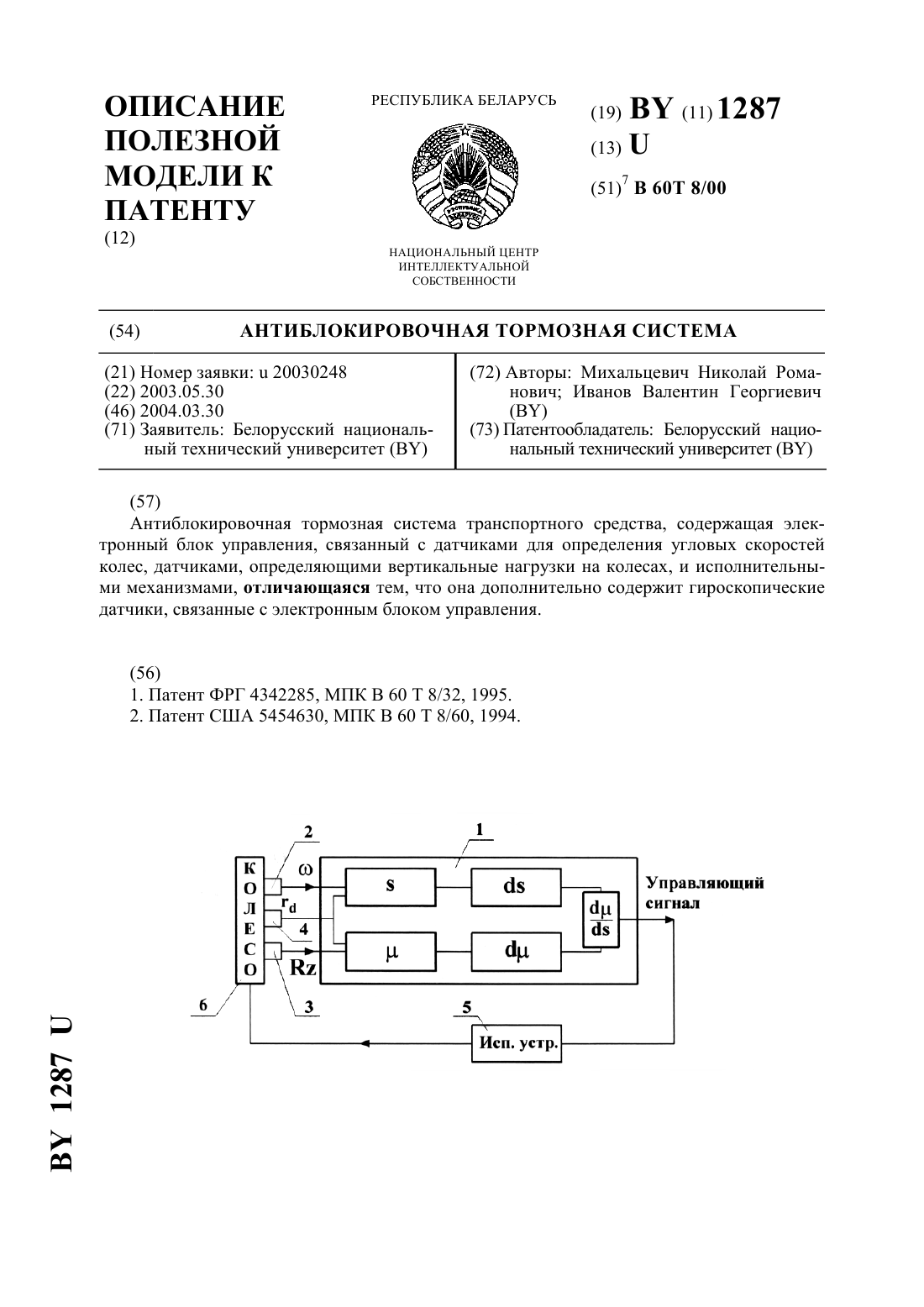
...что приводит к неустойчивости транспортного средства. Задачей предлагаемой полезной модели является создание антиблокировочной тормозной системы, позволяющей управлять торможением каждого колеса в отдельности,используя информацию о максимальном коэффициенте сцепления, коэффициенте относительного скольжения, угле наклона колеса и угле увода шины в процессе торможения. При этом данная система должна обеспечивать запас по устойчивости...
Антиблокировочная тормозная система с двухуровневым регулированием
Номер патента: U 1484
Опубликовано: 30.09.2004
Авторы: Сяхович Владимир Эдуардович, Иванов Валентин Георгиевич, Михальцевич Николай Романович
МПК: B60T 8/00
Метки: антиблокировочная, двухуровневым, система, тормозная, регулированием
Текст:
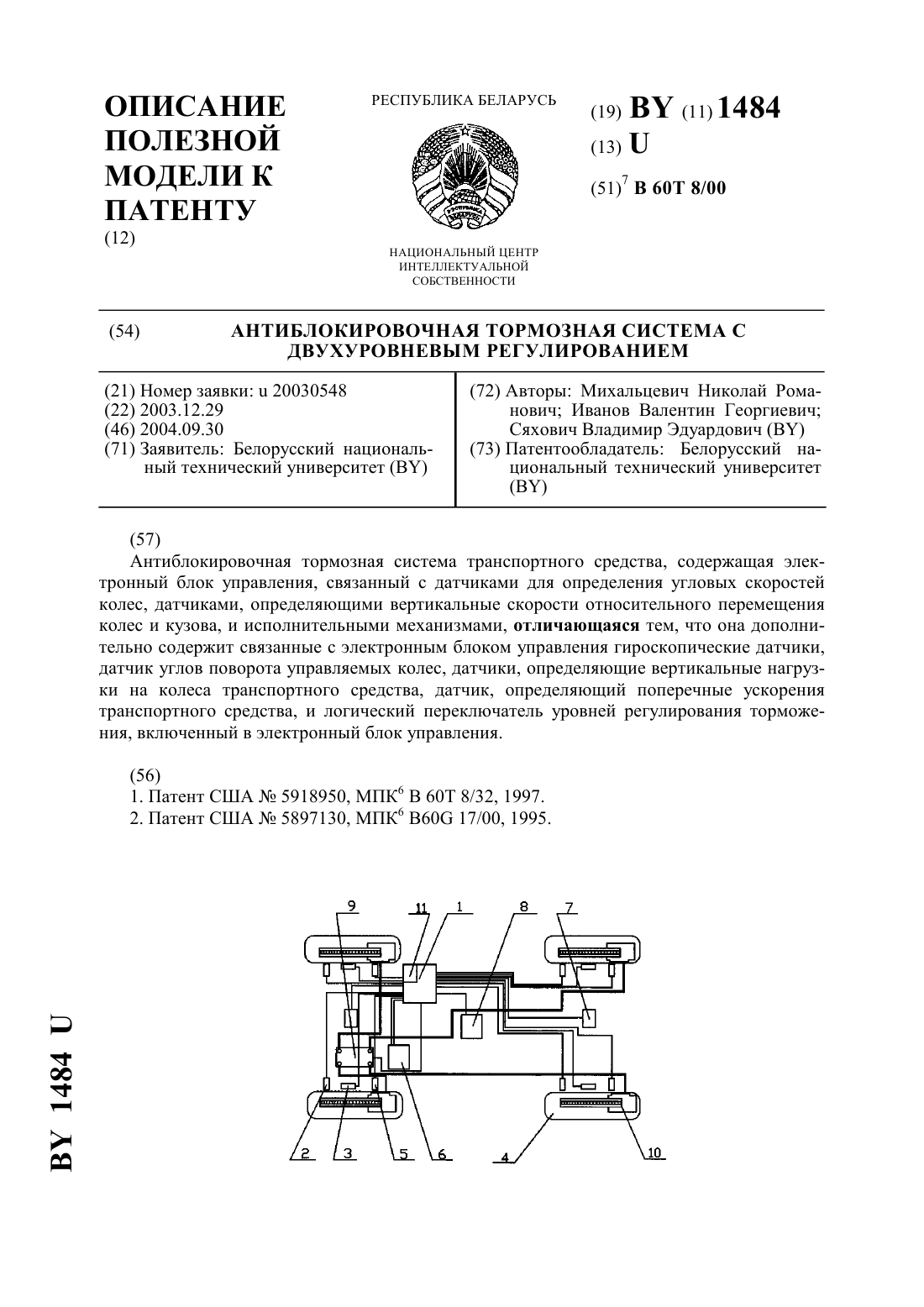
...содержащая электронный блок управления, связанный с датчиками для определения угловых скоростей колес, датчиками, определяющими вертикальные скорости относительного перемещения колес и кузова, и исполнительными механизмами,которая дополнительно содержит связанные с электронным блоком управления гироскопические датчики, датчик углов поворота управляемых колес, датчики, определяющие вертикальные нагрузки на колеса транспортного...
Система управления положением корпуса гусеничной машины
Номер патента: U 552
Опубликовано: 30.06.2002
Авторы: Котлобай Андрей Анатольевич, Ковалев Ярослав Никитич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: гусеничной, машины, положением, корпуса, система, управления
Текст:
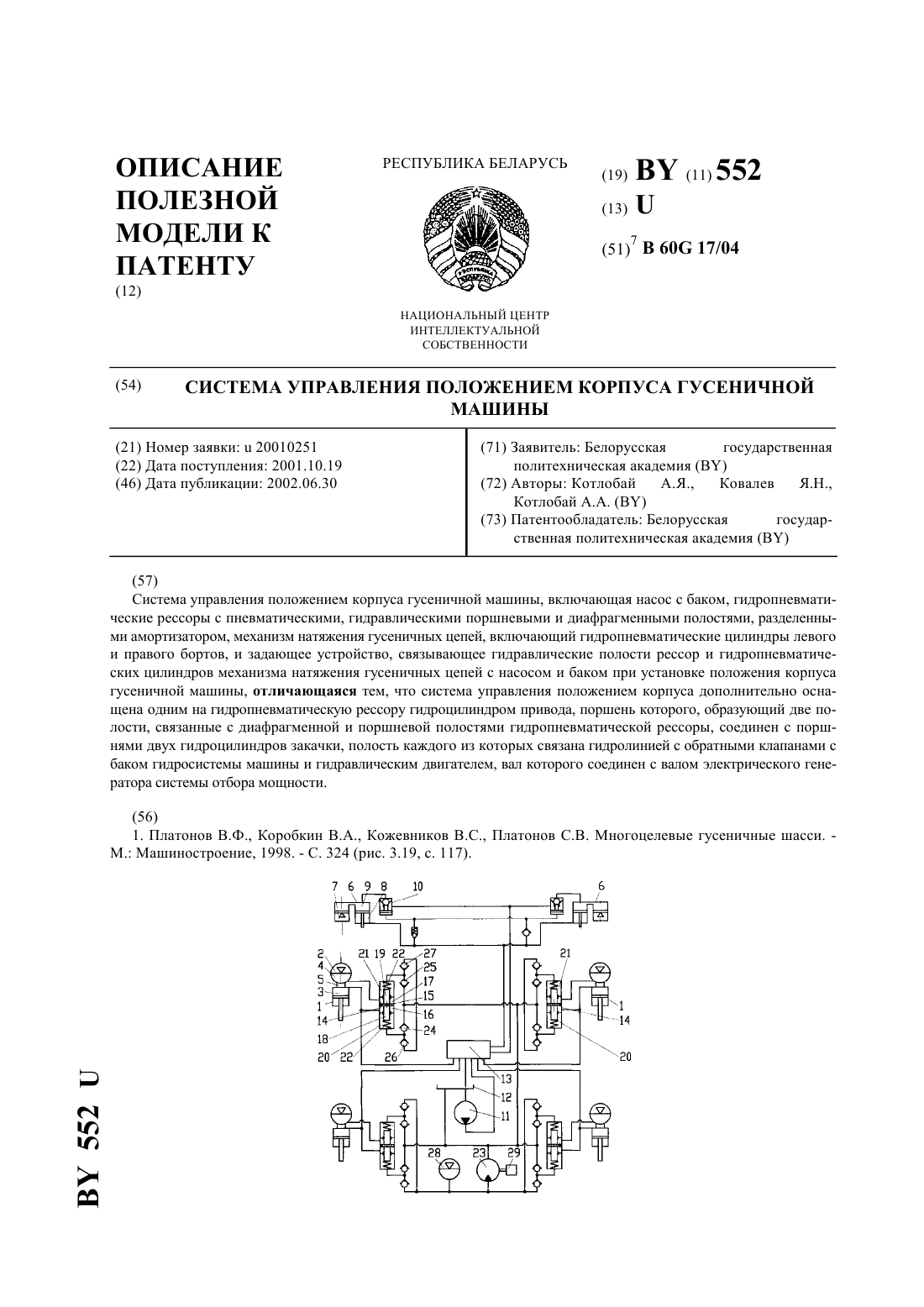
...цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 6 с пневматической 7, гидравлической штоковой 8 и поршневой 9 полостями. Поршневые полости 9 заперты гидрозамками 10. Гидравлические полости 3, 4 гидропневматических рессор 1, 8 гидропневматического цилиндра 6, напорные полости гидрозамков 10 связаны с насосом 11 и баком 12...
Система управления положением корпуса гусеничной машины
Номер патента: U 1739
Опубликовано: 30.12.2004
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: машины, гусеничной, положением, управления, система, корпуса
Текст:
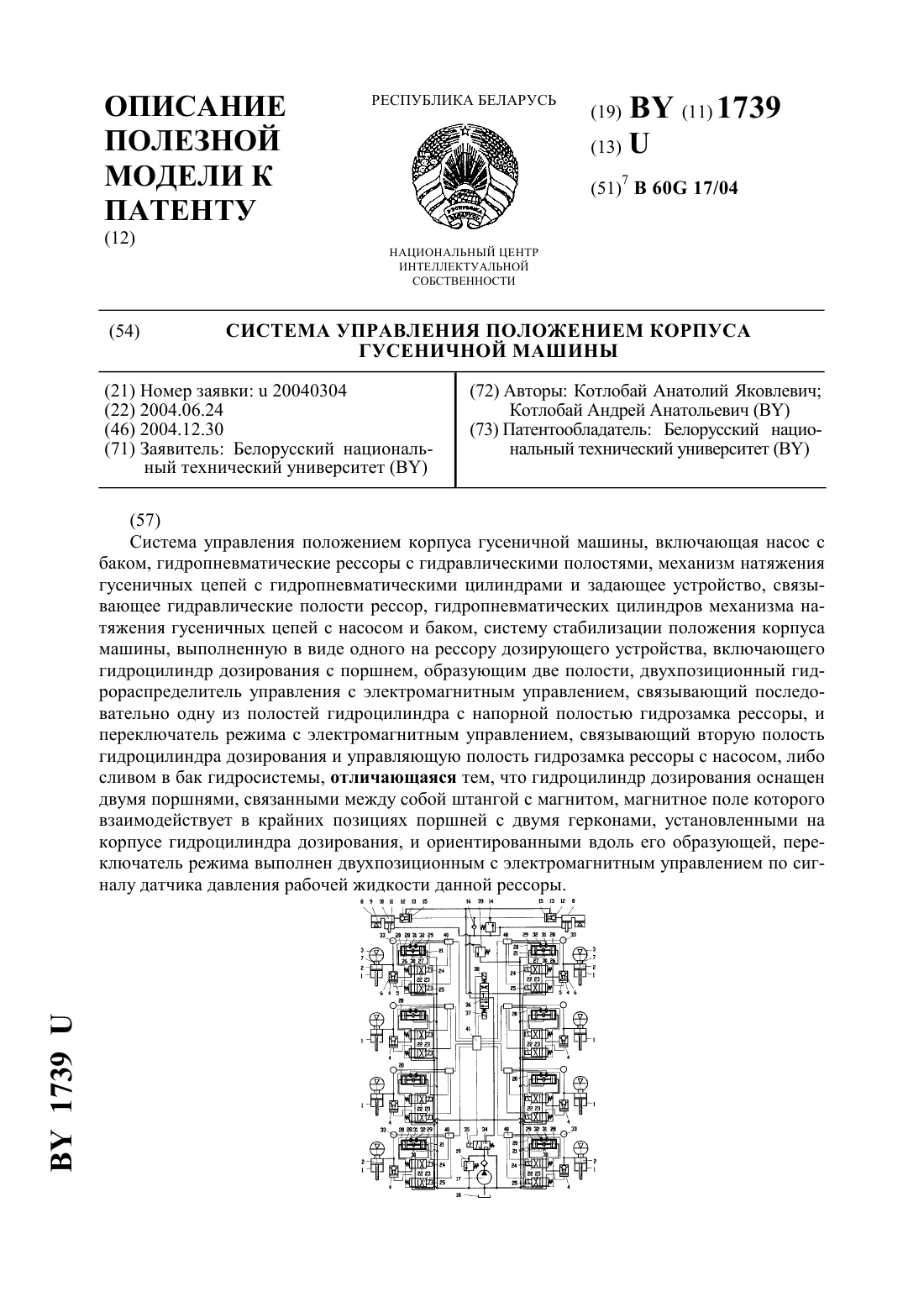
...в зону герконов 31. Герконы 31 замыкаются. Сигналы герконов 31 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 гидропневматических рессор 1 задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 подают питание на обмотки электромагнитов 24, и гидрораспределители управления 22 переводятся во вторую...
Предыдущий патент: Привод педальный комбинированный с удвоенным ходом ползунов
Следующий патент: Устройство для плющения и консервирования зерна
Случайный патент: Вальцевая плющилка влажного зерна