H02P 5/06 — H02P 5/06
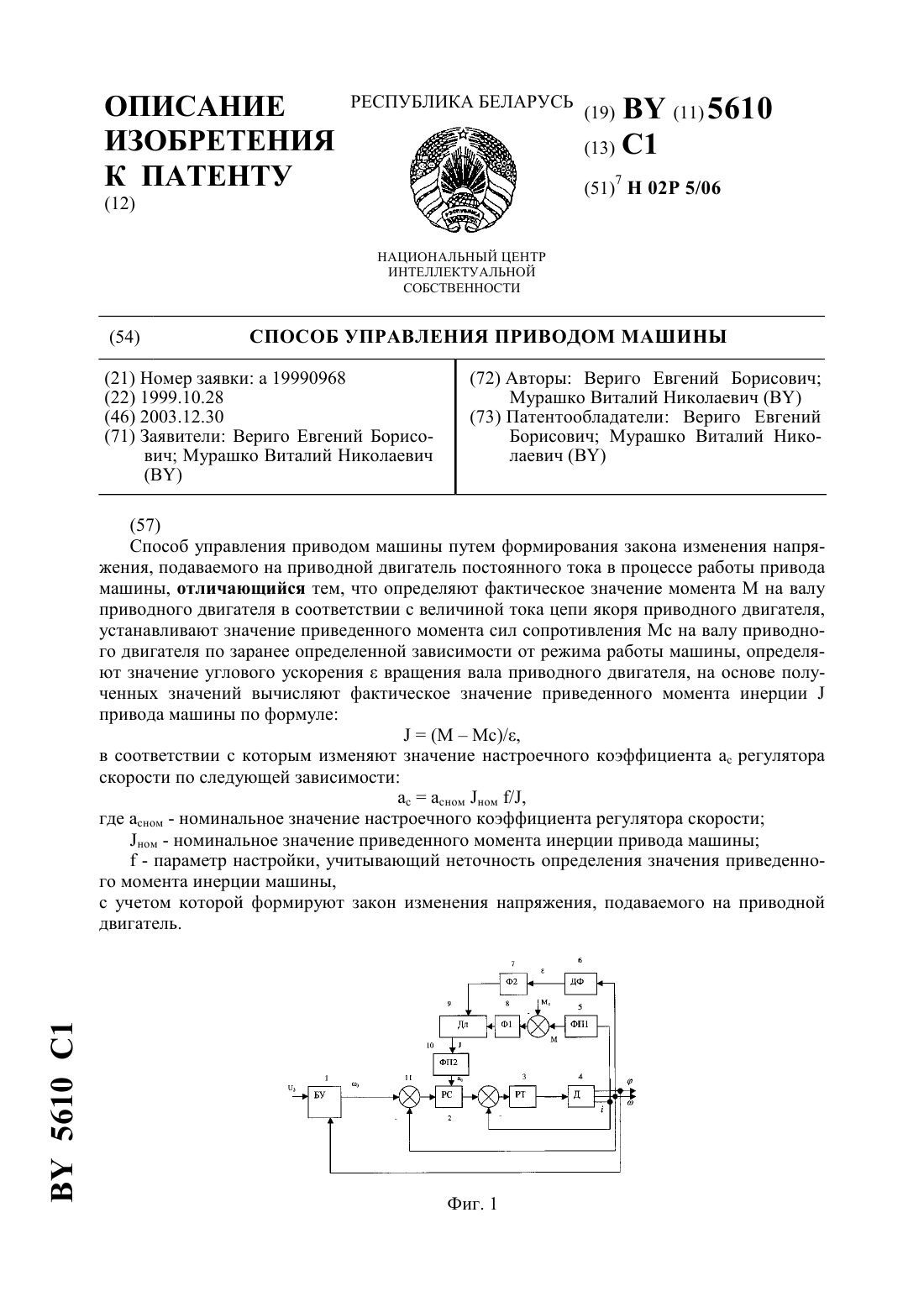
Способ управления приводом машины
Номер патента: 5610
Опубликовано: 30.12.2003
Авторы: Мурашко Виталий Николаевич, Вериго Евгений Борисович
МПК: H02P 5/06
Метки: приводом, способ, машины, управления
Текст:
...системы, при постоянном значении настроечного коэффициента регулятора скорости ас.ном, в случае изменения приведенного момента инерции, не будет обеспечиваться оптимальная настройка системы, такая, что значение времени регулирования и уровень колебательности механической части системы оставались бы оптимальными. Для обеспечения инвариантности контура скорости относительно значения приведенного момента инерции значение настроечного...
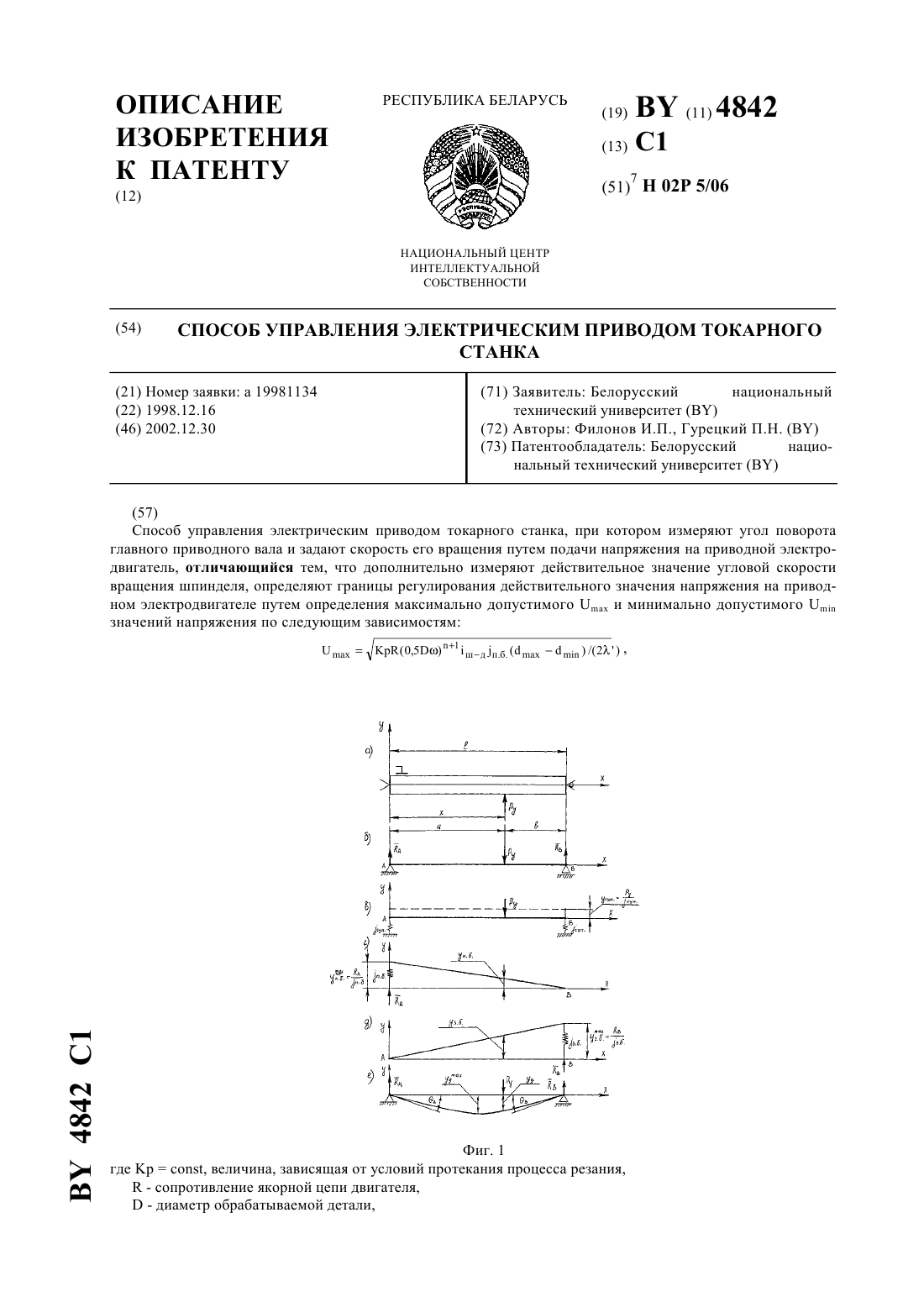
Способ управления электрическим приводом токарного станка
Номер патента: 4842
Опубликовано: 30.12.2002
Авторы: Гурецкий Павел Николаевич, Филонов Игорь Павлович
МПК: H02P 5/06
Метки: электрическим, способ, приводом, станка, управления, токарного
Текст:
...деформацией детали, положены условия закрепления, отражающие обработку в центрах. С геометрической точки зрения это значит, что изогнутая ось проходит через заданные в системе координат ХУ точки А и В, имея заданное направление. Для двух опорных балок в независимости от места расположения опор условие закрепления можно записать в виде 1) при ХХА 0 У(ХА)0 2) при ХХВ У(ХВ)0. Следовательно, изогнутая ось детали представляет собой...
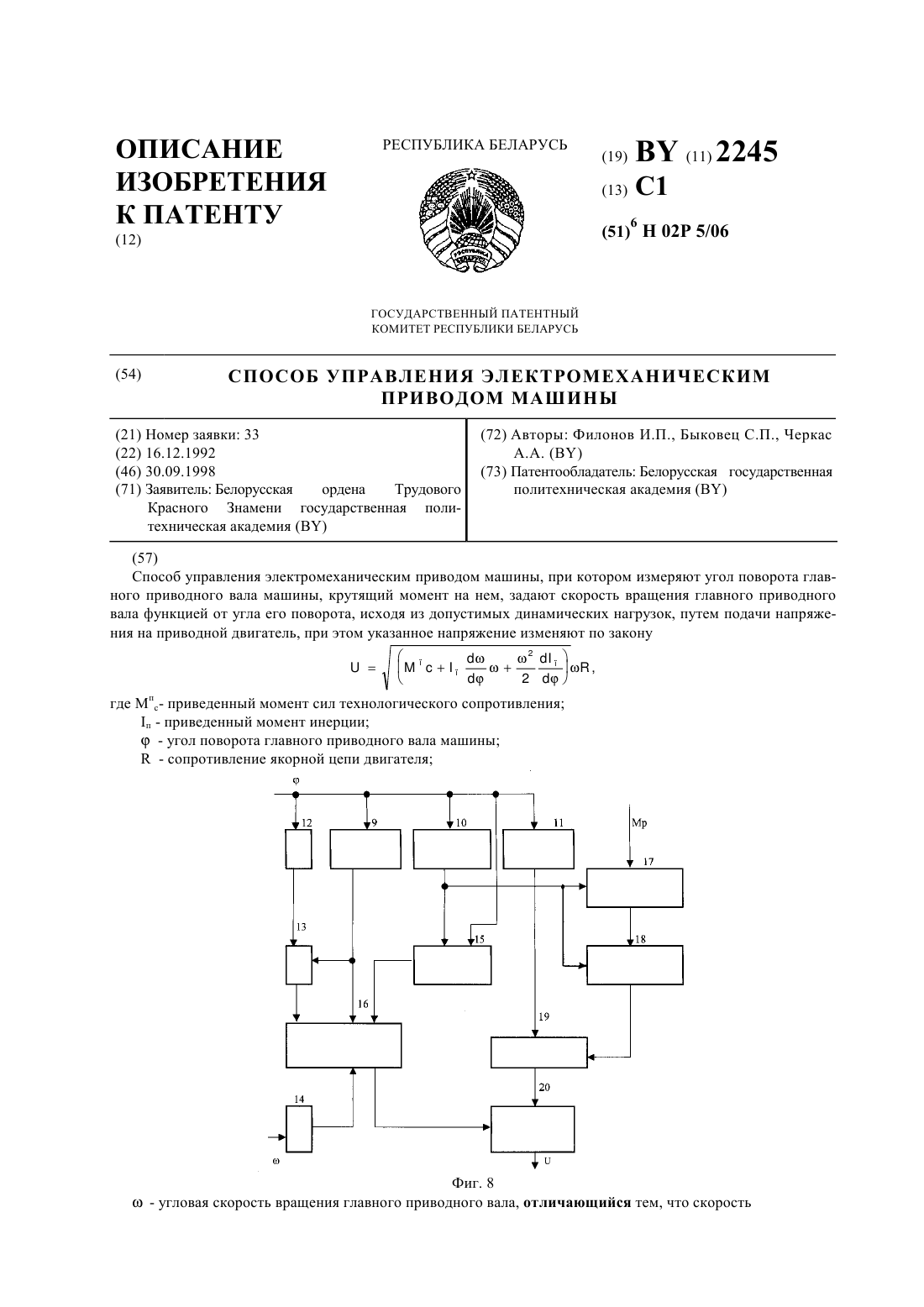
Способ управления электромеханическим приводом машин
Номер патента: 2245
Опубликовано: 30.09.1998
Авторы: Филонов И. П., Быкевец С. П., Черкас А. А.
МПК: H02P 5/06
Метки: машин, электромеханическим, способ, управления, приводом
Текст:
...скоростиот нуля до ср главного приводного вала машины. 2 и, определяющие суммарное значение привеНа фигуре 5 представлены зависимости,2 денного моментадвижущих сил в функции углаповорота главного приводного вала машины. На фи гуре 6 приведена зависимость, полученная как сумма составляющих, изображенных на фигуре 5. На фиг. 7 представлена структурная схема системы управления, включающая вычислитель 1, регулятор 2,двигатель 3, датчика 4...