Способ управления буксованием ведущих колес транспортного средства
Номер патента: 16659
Опубликовано: 30.12.2012
Авторы: Чернин Михаил Абрамович, Белоус Михаил Михайлович, Высоцкий Михаил Степанович, Дубовик Дмитрий Александрович, Бурдыкин Иван Васильевич
Текст
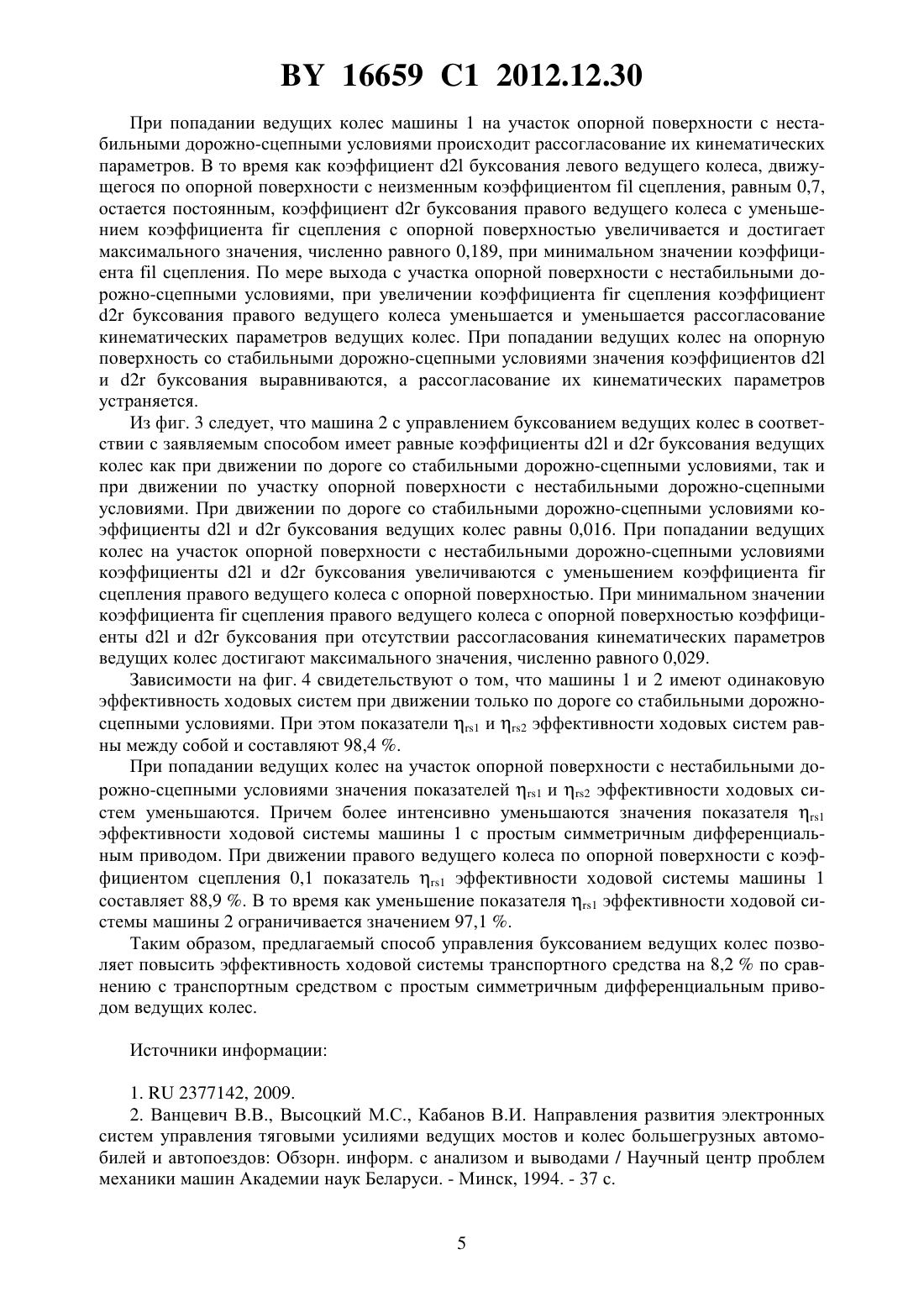
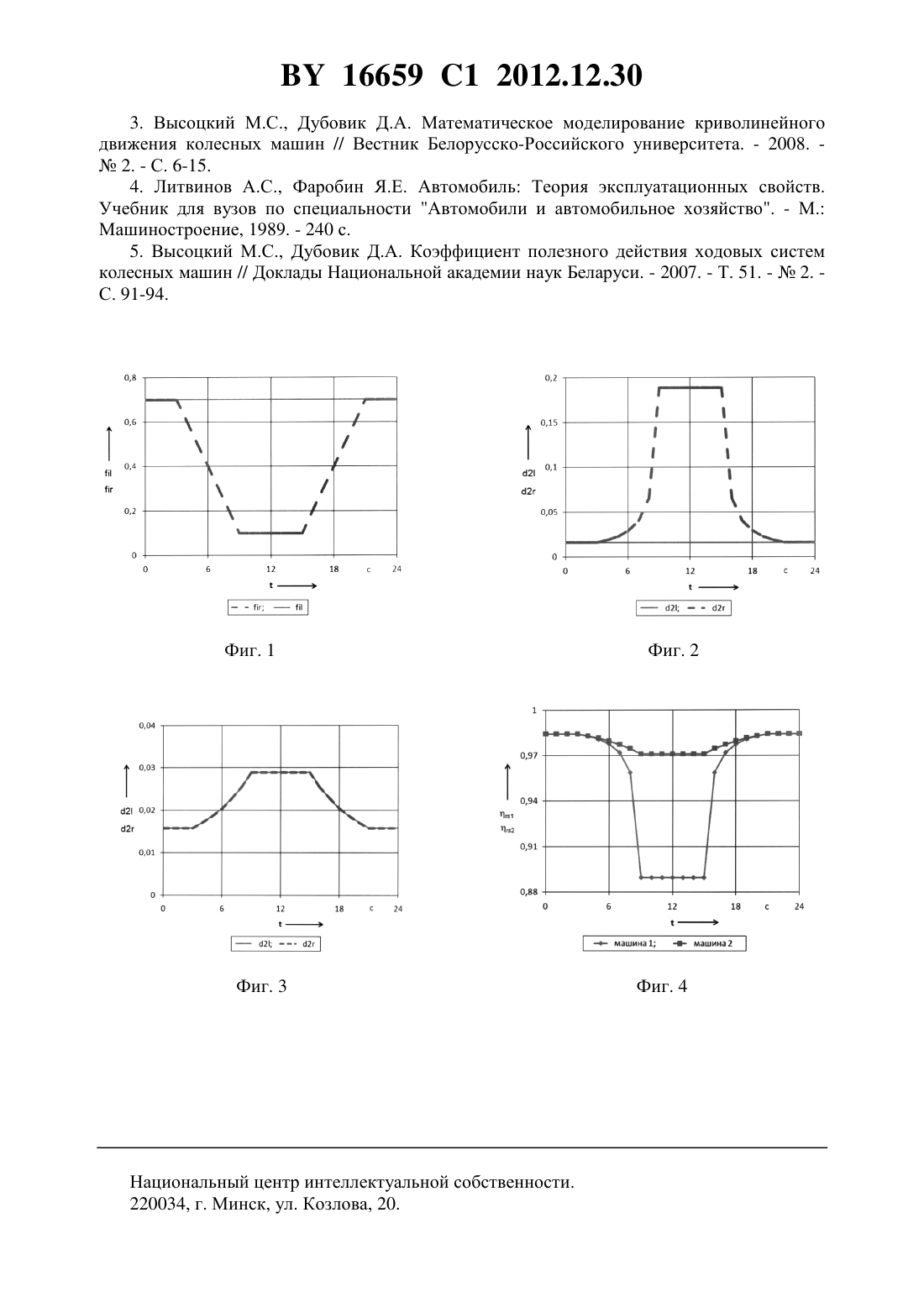
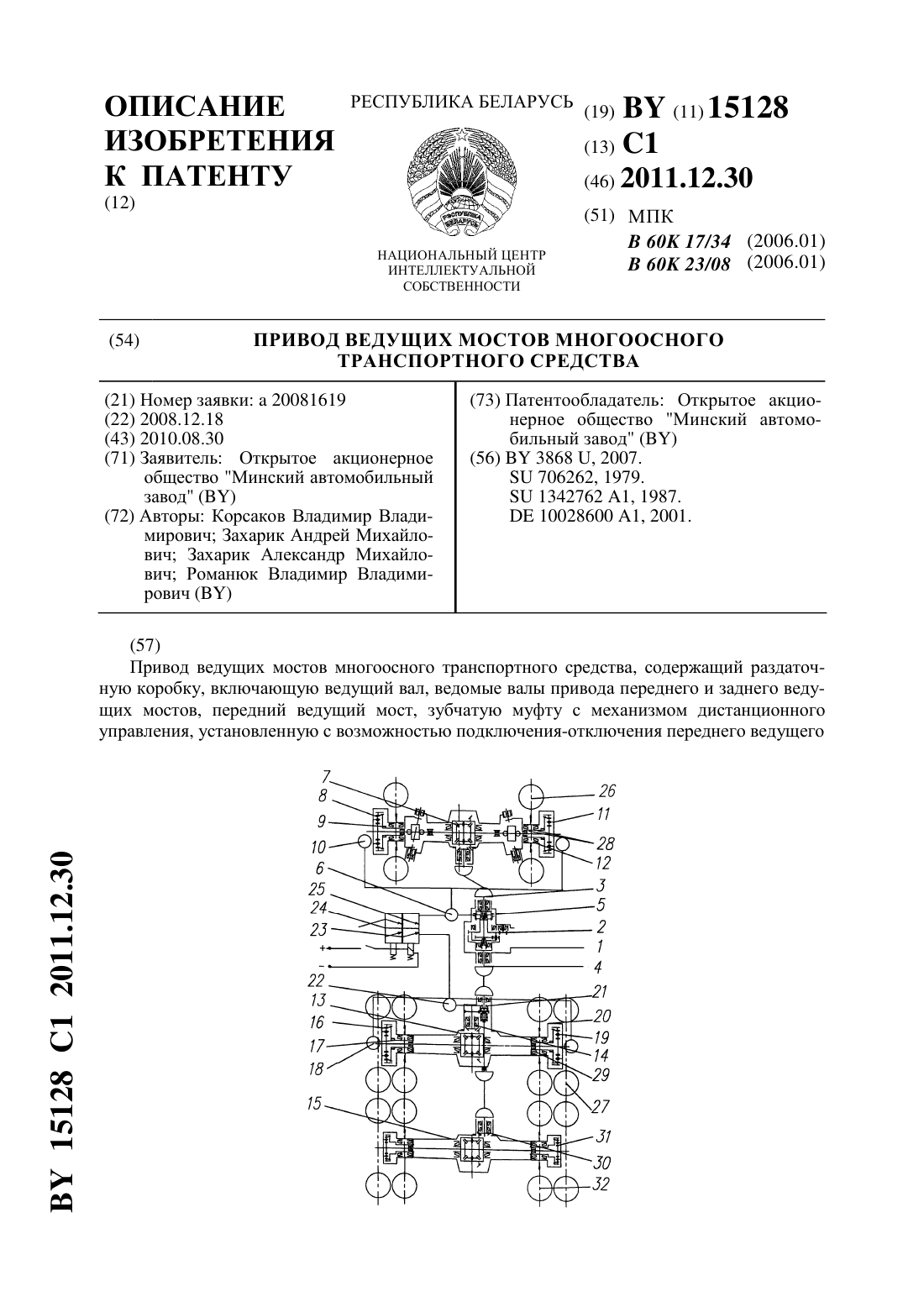
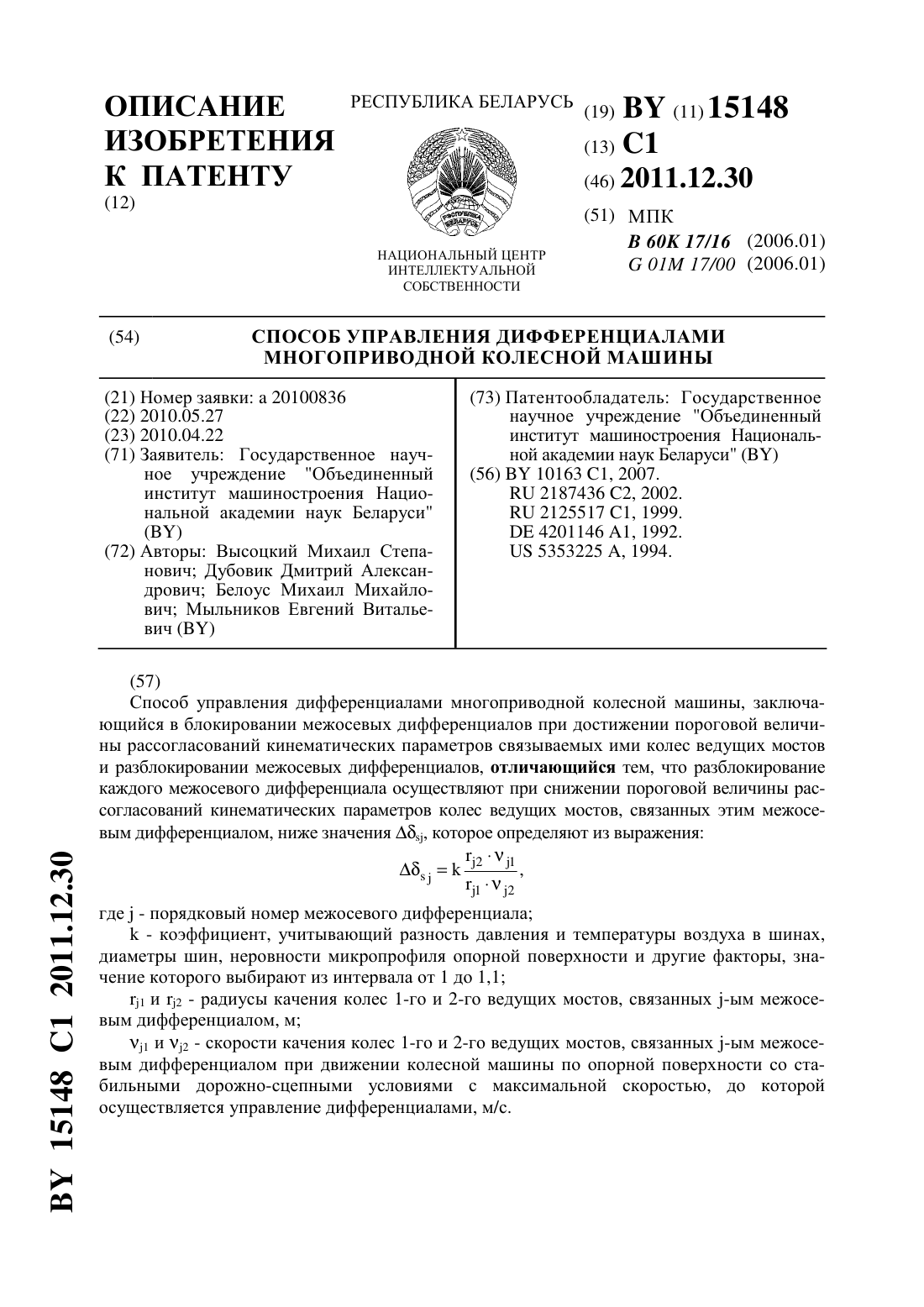
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ БУКСОВАНИЕМ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Высоцкий Михаил Степанович Дубовик Дмитрий Александрович Белоус Михаил Михайлович Бурдыкин Иван Васильевич Чернин Михаил Абрамович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(56) Направления развития электронных систем управления тяговыми усилиями ведущих мостов и колес большегрузных автомобилей и автопоездов. Обзорная информация с анализом и выводами. - Минск, 1994. - С. 14-25.2324611 2, 2008.89031 1, 2009.89462 1, 2009.2004308527 , 2004.6066172 , 1994.2003/0216850 1.(57) Способ управления буксованием ведущих колес транспортного средства, при котором осуществляют подтормаживание ведущего колеса, растормаживание подторможенного ведущего колеса или регулируют мощность двигателя, причем подтормаживают ведущее колесо с более высоким коэффициентом буксования до выравнивания кинематических параметров ведущих колес при достижении величины рассогласования кинематических параметров ведущих колес заданной пороговой величины, растормаживают подторможенное ведущее колесо при превышении значения коэффициента буксования неподторможенного ведущего колеса значения коэффициента буксования подторможенного ведущего колеса до выравнивания кинематических параметров ведущих колес или регулируют мощность двигателя, уменьшая ее до достижения величины рассогласования кинематических параметров ведущих и ведомых колес заданной пороговой величины, при превышении величины рассогласования кинематических параметров ведущих и ведомых колес заданной пороговой величины и равенстве коэффициентов буксования ведущих колес. Изобретение относится к области автомобилестроения, в частности к способам управления буксованием ведущих колес транспортного средства. Может быть использовано при проектировании противобуксовочных систем (ПБС) транспортных средств, а также при проведении исследований и испытаний колесных машин. 16659 1 2012.12.30 Известен способ управления дифференциалами многоприводной колесной машины 1, заключающийся в блокировании межосевых дифференциалов при достижении пороговой величины рассогласований кинематических параметров связываемых ими ведущих колес и последующем их разблокировании. Причем разблокирование межосевых дифференциалов осуществляют при снижении рассогласований кинематических параметров колес связываемых ими ведущих мостов ниже значений пороговых величин, определяемых из выражения 21,12 где- пороговая величина рассогласований кинематических параметров колес ведущих мостов 1 и 2 - радиусы качения внешнего и внутреннего по отношению к центру поворота колес -го ведущего моста соответственно, м 1 и 2 - скорости качения внешнего и внутреннего по отношению к центру поворота колес -го ведущего моста соответственно при движении колесной машины по опорной поверхности со стабильными дорожно-сцепными условиями с максимальной скоростью,до которой осуществляется управление дифференциалами, м/с- порядковый номер ведущего моста из числа связываемых соответствующим межосевым дифференциалом. Данный способ позволяет осуществлять изменение буксования ведущих мостов посредством управления режимами блокирования и разблокирования межосевых дифференциалов в зависимости от текущих дорожно-сцепных условий под ведущими колесами многоприводных колесных машин. Недостатком данного способа является то, что он не позволяет осуществлять изменение буксования ведущих колес транспортных средств с одним ведущим мостом, а также осуществлять плавное изменение буксования ведущих колес в широком диапазоне значений. Наиболее близким по технической сущности к заявляемому решению является способ управления буксованием ведущих колес транспортного средства 2, реализованный в системе АБС/ПБС фирмыи - и заключающийся в последовательно следующих режиме подтормаживания ведущего колеса с более высоким коэффициентом буксования и режиме регулирования мощности двигателя при наличии рассогласования кинематических параметров ведущих и ведомых колес заданной пороговой величины. Причем подтормаживание ведущего колеса осуществляют до допустимой скорости скольжения, по достижении которой осуществляют его растормаживание. Указанный способ принят в качестве прототипа. Недостатком данного способа является то, что он не учитывает текущие дорожносцепные условия под ведущими колесами и не предотвращает повторную пробуксовку ведущих колес при движении транспортного средства в пределах одного участка опорной поверхности с нестабильными дорожно-сцепными условиями, что приводит к циклическому чрезмерному снижению эффективности ходовой системы транспортного средства. Задачей настоящего изобретения является повышение эффективности работы ходовых и противобуксовочных систем колесных транспортных средств. Решение поставленной задачи достигается в способе управления буксованием ведущих колес транспортного средства, при котором осуществляют подтормаживание ведущего колеса, растормаживание подторможенного ведущего колеса или регулируют мощность двигателя, причем подтормаживают ведущее колесо с более высоким коэффициентом буксования до выравнивания кинематических параметров ведущих колес при достижении величины рассогласования кинематических параметров ведущих колес заданной пороговой величины, растормаживают подторможенное ведущее колесо при 2 16659 1 2012.12.30 превышении значения коэффициента буксования неподторможенного ведущего колеса значения коэффициента буксования подторможенного ведущего колеса до выравнивания кинематических параметров ведущих колес или регулирует мощность двигателя, уменьшая ее до достижения величины рассогласования кинематических параметров ведущих и ведомых колес заданной пороговой величины, при превышении величины рассогласования кинематических параметров ведущих и ведомых колес заданной пороговой величины и равенстве коэффициентов буксования ведущих колес. Заявляемый способ позволяет исключить повторную пробуксовку ведущих колес при движении в пределах одного участка опорной поверхности с нестабильными дорожносцепными условиями и, следовательно, повысить эффективность ходовых и противобуксовочных систем транспортных средств. Изобретение поясняется фигурами. На фиг. 1 представлены графические зависимости изменения коэффициентов сцепления ведущих колес с дорожной поверхностью от времени движения транспортного средства. На фиг. 2-3 представлены графические зависимости изменения коэффициентов буксования ведущих колес от времени движения колесных машин 1 и 2 соответственно. На фиг. 4 представлены графические зависимости изменения показателя эффективности ходовых систем от времени движения колесных машин 1 и 2. Пример реализации способа. Заявляемый способ оценивался расчетным методом в качестве алгоритма функционирования противобуксовочной системы (ПБС) седельного тягача МАЗ-54421 с колесной формулой 42 с полуприцепом МАЗ-9758 общей массой 42000 кг. Для реализации заявляемого способа управления буксованием ведущих колес составлялась математическая модель движения автомобильного поезда в составе седельного двухосного тягача с колесной формулой 42 и трехосного полуприцепа с использованием уравнений Аппеля 3. Моделирование движения автомобильного поезда осуществлялось по асфальтобетонной дороге с двумя участками опорной поверхности с нестабильными дорожно-сцепными условиями. Первый участок опорной поверхности с нестабильными дорожно-сцепными условиями моделировался под ведущими колесами разных бортов автомобильного поезда. Коэффициенты сцепления обоих ведущих колес с опорной поверхностью принимались равными 0,1 при повышенном сопротивлении качению ведомых и ведущих колес (заснеженная асфальтобетонная дорога, покрытая льдом). В случае движения автомобильного поезда по асфальтобетонной дороге с первым участком опорной поверхности с нестабильными дорожно-сцепными условиями, что характерно, как правило, для начала движения транспортного средства (трогания с места),обеспечивается равенство буксований ведущих колес. При превышении рассогласования кинематических параметров ведущих и ведомых колес пороговой величины в соответствии с заявляемым способом в данном случае осуществляется переход на автономный режим регулирования мощности двигателя. Регулирование мощности двигателя осуществляется путем уменьшения скорости вращения коленчатого вала. В результате уменьшается коэффициент буксования, а следовательно, повышаются коэффициент продольной силы и касательные силы тяги ведущих колес. Уменьшение скорости вращения коленчатого вала осуществляется до тех пор, пока происходит увеличение касательных сил тяги ведущих колес и реализуемого двигателем крутящего момента, т.е. до максимального значения коэффициента продольной силы 4. Увеличение касательных сил тяги на ведущих колесах приводит к увеличению общего тягового усилия тягача и соответственно скорости поступательного движения автомобильного поезда, а также скорости вращения его ведомых колес. При достижении рассогласования кинематических параметров ведущих и ведомых колес заданной пороговой величины, что является характерным признаком выхода с участка опорной поверхности с нестабильными дорожно-сцепными 3 16659 1 2012.12.30 условиями, происходит увеличение скорости вращения коленчатого вала до величины,задаваемой водителем управлением педалью (нажатием на педаль) акселератора. Второй участок опорной поверхности с нестабильными дорожно-сцепными условиями моделировался при установившемся движении автомобильного поезда посредством изменения коэффициента сцепления под колесами правого борта автомобильного поезда. Коэффициент сцепления ведущего колеса с опорной поверхностью изменялся путем уменьшения от 0,7 до 0,1 с интенсивностью 0,1 на один метр опорной поверхности, обеспечения равенства значению 0,1 на протяжении 7 м опорной поверхности и увеличения от 0,1 до 0,7 с интенсивностью 0,1 на один метр опорной поверхности (фиг. 1). Установившееся движение автомобильного поезда моделировалось со скоростью поступательного движения, равной 1 м/с. Для сравнительной оценки эффективности предлагаемого способа осуществлялось моделирование движения двух транспортных средств (машин) с одними и теми же массовыми, геометрическими и другими параметрами, соответствующими параметрам автомобильного поезда в составе седельного тягача МАЗ-54421 и полуприцепа МАЗ-9758, но с различными способами управления буксованием ведущих колес. В машине 1 распределение буксований ведущих колес моделировалось простым симметричным дифференциальным приводом. В машине 2 управление буксованием ведущих колес моделировалось противобуксовочной системой (ПБС) в соответствии с заявляемым способом. При моделировании принималось, что ПБС реагирует на любое (даже самое малое) рассогласование кинематических параметров и процессы подтормаживания ведущих колес и регулирования мощности двигателя происходят мгновенно. Эффективность заявляемого способа управления буксованием ведущих колес оценивалась с помощью показателя эффективности ходовых систем колесных машин 5, рассчитываемого по выражению, где- показатель эффективности ходовых систем колесных машин- мощность, расходуемая ходовой системой на осуществление движения колесной машины в направлении, задаваемом водителем поворотом рулевого колеса, Вт- мощность, передаваемая ходовой системе колесной машины, Вти- мощности, расходуемые соответственно левым и правым колесами -го моста на осуществление движения колесной машины в направлении, задаваемом водителем поворотом рулевого колеса (индексы 1 иотносятся соответственно к левому и правому колесам ведущего моста), Вти- мощности, подведенные соответственно к левому и правому колесу -го моста колесной машины, Вт- количество ведущих мостов колесной машины. В ходе моделирования были установлены графические зависимости коэффициентов 2 и 2 буксований ведущих колес машин 1 и 2 от времени их движения по асфальтобетонной дороге с участком с нестабильными дорожно-сцепными условиями, приведенные соответственно на фиг. 2 и 3. Анализ зависимостей на фиг. 2 показывает, что при движении машины 1 с простым симметричным дифференциальным приводом по асфальтобетонной дороге со стабильными дорожно-сцепными условиями ведущие колеса имеют равные коэффициенты буксования, численные значения которых соответствуют 0,016. 16659 1 2012.12.30 При попадании ведущих колес машины 1 на участок опорной поверхности с нестабильными дорожно-сцепными условиями происходит рассогласование их кинематических параметров. В то время как коэффициент 2 буксования левого ведущего колеса, движущегося по опорной поверхности с неизменным коэффициентомсцепления, равным 0,7,остается постоянным, коэффициент 2 буксования правого ведущего колеса с уменьшением коэффициентасцепления с опорной поверхностью увеличивается и достигает максимального значения, численно равного 0,189, при минимальном значении коэффициентасцепления. По мере выхода с участка опорной поверхности с нестабильными дорожно-сцепными условиями, при увеличении коэффициентасцепления коэффициент 2 буксования правого ведущего колеса уменьшается и уменьшается рассогласование кинематических параметров ведущих колес. При попадании ведущих колес на опорную поверхность со стабильными дорожно-сцепными условиями значения коэффициентов 2 и 2 буксования выравниваются, а рассогласование их кинематических параметров устраняется. Из фиг. 3 следует, что машина 2 с управлением буксованием ведущих колес в соответствии с заявляемым способом имеет равные коэффициенты 2 и 2 буксования ведущих колес как при движении по дороге со стабильными дорожно-сцепными условиями, так и при движении по участку опорной поверхности с нестабильными дорожно-сцепными условиями. При движении по дороге со стабильными дорожно-сцепными условиями коэффициенты 2 и 2 буксования ведущих колес равны 0,016. При попадании ведущих колес на участок опорной поверхности с нестабильными дорожно-сцепными условиями коэффициенты 2 и 2 буксования увеличиваются с уменьшением коэффициентасцепления правого ведущего колеса с опорной поверхностью. При минимальном значении коэффициентасцепления правого ведущего колеса с опорной поверхностью коэффициенты 2 и 2 буксования при отсутствии рассогласования кинематических параметров ведущих колес достигают максимального значения, численно равного 0,029. Зависимости на фиг. 4 свидетельствуют о том, что машины 1 и 2 имеют одинаковую эффективность ходовых систем при движении только по дороге со стабильными дорожносцепными условиями. При этом показатели 1 и 2 эффективности ходовых систем равны между собой и составляют 98,4 . При попадании ведущих колес на участок опорной поверхности с нестабильными дорожно-сцепными условиями значения показателей 1 и 2 эффективности ходовых систем уменьшаются. Причем более интенсивно уменьшаются значения показателя 1 эффективности ходовой системы машины 1 с простым симметричным дифференциальным приводом. При движении правого ведущего колеса по опорной поверхности с коэффициентом сцепления 0,1 показатель 1 эффективности ходовой системы машины 1 составляет 88,9 . В то время как уменьшение показателя 1 эффективности ходовой системы машины 2 ограничивается значением 97,1 . Таким образом, предлагаемый способ управления буксованием ведущих колес позволяет повысить эффективность ходовой системы транспортного средства на 8,2 по сравнению с транспортным средством с простым симметричным дифференциальным приводом ведущих колес. Источники информации 1.2377142, 2009. 2. Ванцевич В.В., Высоцкий М.С., Кабанов В.И. Направления развития электронных систем управления тяговыми усилиями ведущих мостов и колес большегрузных автомобилей и автопоездов Обзорн. информ. с анализом и выводами / Научный центр проблем механики машин Академии наук Беларуси. - Минск, 1994. - 37 с. 16659 1 2012.12.30 3. Высоцкий М.С., Дубовик Д.А. Математическое моделирование криволинейного движения колесных машин // Вестник Белорусско-Российского университета. - 2008.2. - С. 6-15. 4. Литвинов А.С., Фаробин Я.Е. Автомобиль Теория эксплуатационных свойств. Учебник для вузов по специальности Автомобили и автомобильное хозяйство. - М. Машиностроение, 1989. - 240 с. 5. Высоцкий М.С., Дубовик Д.А. Коэффициент полезного действия ходовых систем колесных машин // Доклады Национальной академии наук Беларуси. - 2007. - Т. 51. -2. С. 91-94. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: B60W 10/06, B60T 8/1755, B60K 28/16, B60W 10/18
Метки: способ, транспортного, ведущих, управления, колес, буксованием, средства
Код ссылки
<a href="https://by.patents.su/6-16659-sposob-upravleniya-buksovaniem-vedushhih-koles-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Способ управления буксованием ведущих колес транспортного средства</a>
Привод ведущих мостов многоосного транспортного средства
Номер патента: 15128
Опубликовано: 30.12.2011
Авторы: Захарик Александр Михайлович, Корсаков Владимир Владимирович, Романюк Владимир Владимирович, Захарик Андрей Михайлович
МПК: B60K 23/08, B60K 17/34
Метки: ведущих, средства, многоосного, мостов, транспортного, привод
Текст:
...подключения-отключения их выходных звеньев со ступицами колес, при этом вторая секция коммутационного устройства последовательно соединена сначала с механизмом дистанционного управления зубчатой муфтой подключения-отключения 3 15128 1 2011.12.30 среднего ведущего моста, а затем с механизмами дистанционного управления зубчатых муфт его колесных редукторов. Дополнение привода ведущих мостов многоосного транспортного средства средним ведущим...
Способ управления дифференциалами многоприводной колесной машины
Номер патента: 15148
Опубликовано: 30.12.2011
Авторы: Белоус Михаил Михайлович, Дубовик Дмитрий Александрович, Мыльников Евгений Витальевич, Высоцкий Михаил Степанович
МПК: G01M 17/00, B60K 17/16
Метки: колесной, способ, многоприводной, управления, машины, дифференциалами
Текст:
...условиями. Изобретение поясняется фигурами. На фиг. 1 представлены графические зависимости коэффициентов буксований ведущих колес внедорожной машины МЗКТ-79091 с простым дифференциальным приводом ведущих колес от времени движения по опорной поверхности удовлетворительного состояния с участками с плохими дорожно-сцепными условиями. На фиг. 2 представлены графические зависимости коэффициентов буксований ведущих колес внедорожной машины...
Способ управления движением транспортного средства, движущегося с тяговой нагрузкой
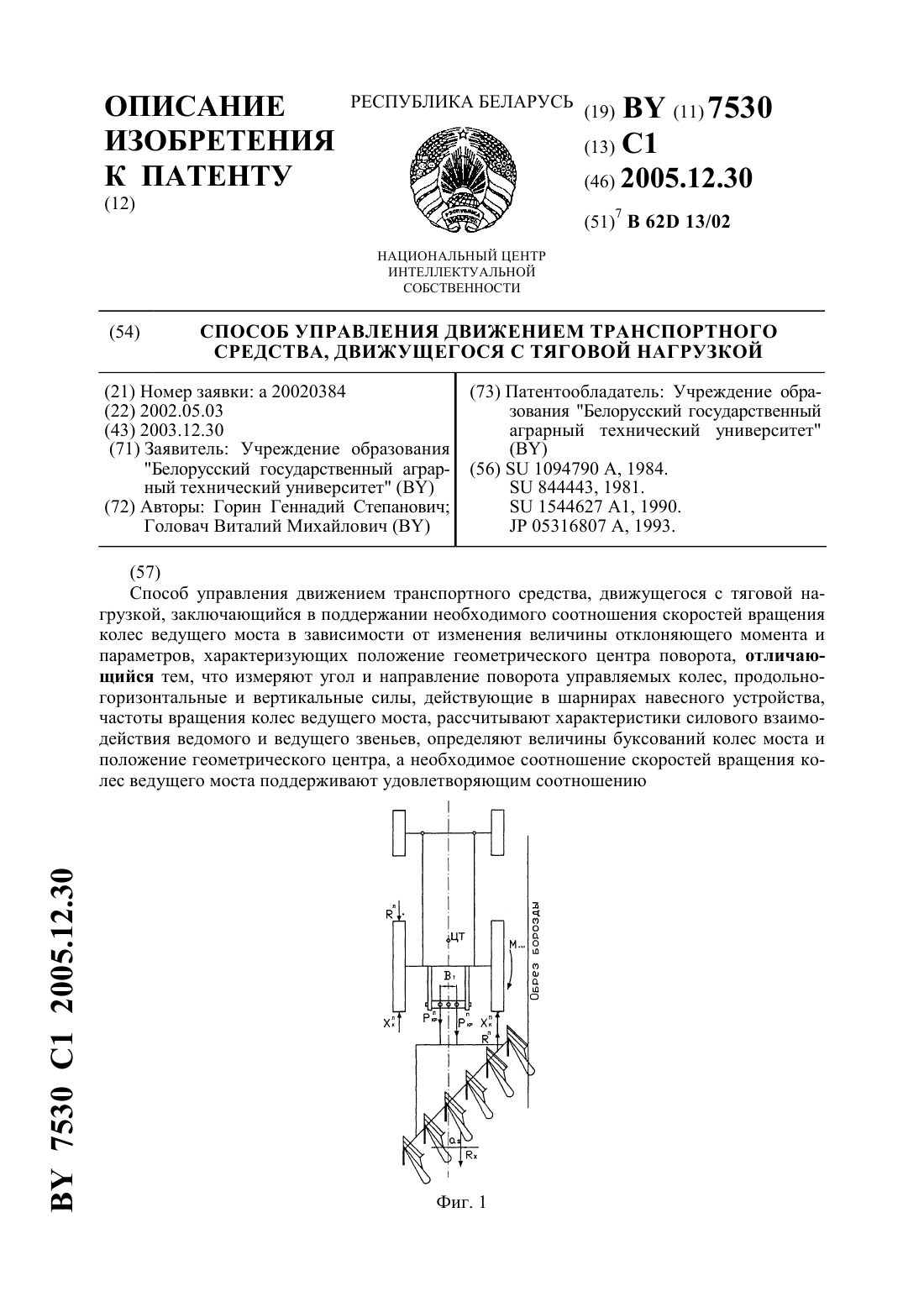
Номер патента: 7530
Опубликовано: 30.12.2005
Авторы: Горин Геннадий Степанович, Головач Виталий Михайлович
МПК: B62D 13/02
Метки: управления, средства, способ, движущегося, движением, тяговой, нагрузкой, транспортного
Текст:
...скоростей. Недостатком известного способа является то, что он во-первых, не предлагает метода исправления траектории поворота с целью сближения следов передних и задних колес, а следовательно, уменьшение транспортного коридора при действии и изменении отклоняющего момента во-вторых, не предлагает метода поддержания прямолинейности курсового движения при действии и изменении отклоняющего момента. Задачей изобретения является стабилизация...
Способ управления блокировками дифференциалов многоприводной колесной машины
Номер патента: 12513
Опубликовано: 30.10.2009
Авторы: Высоцкий Михаил Степанович, Дубовик Дмитрий Александрович, Белоус Михаил Михайлович
МПК: B60K 17/34, F16H 48/00, B60K 17/16...
Метки: машины, управления, дифференциалов, колесной, блокировками, способ, многоприводной
Текст:
...7- мощность, расходуемая ходовой системой на осуществление движения машины в направлении, задаваемом водителем поворотом рулевого колеса, Вт- мощность, передаваемая ходовой системе, Вти- мощность, расходуемая соответственно левым и правым колесами -го моста на осуществление движения машины в направлении, задаваемом водителем поворотом рулевого колеса (знакииотносятся соответственно к правому и левому колесу моста), Вти- мощность, подведенная...
Устройство для регулирования частоты вращения управляемых ведущих колес трактора с навесным устройством и навесным орудием
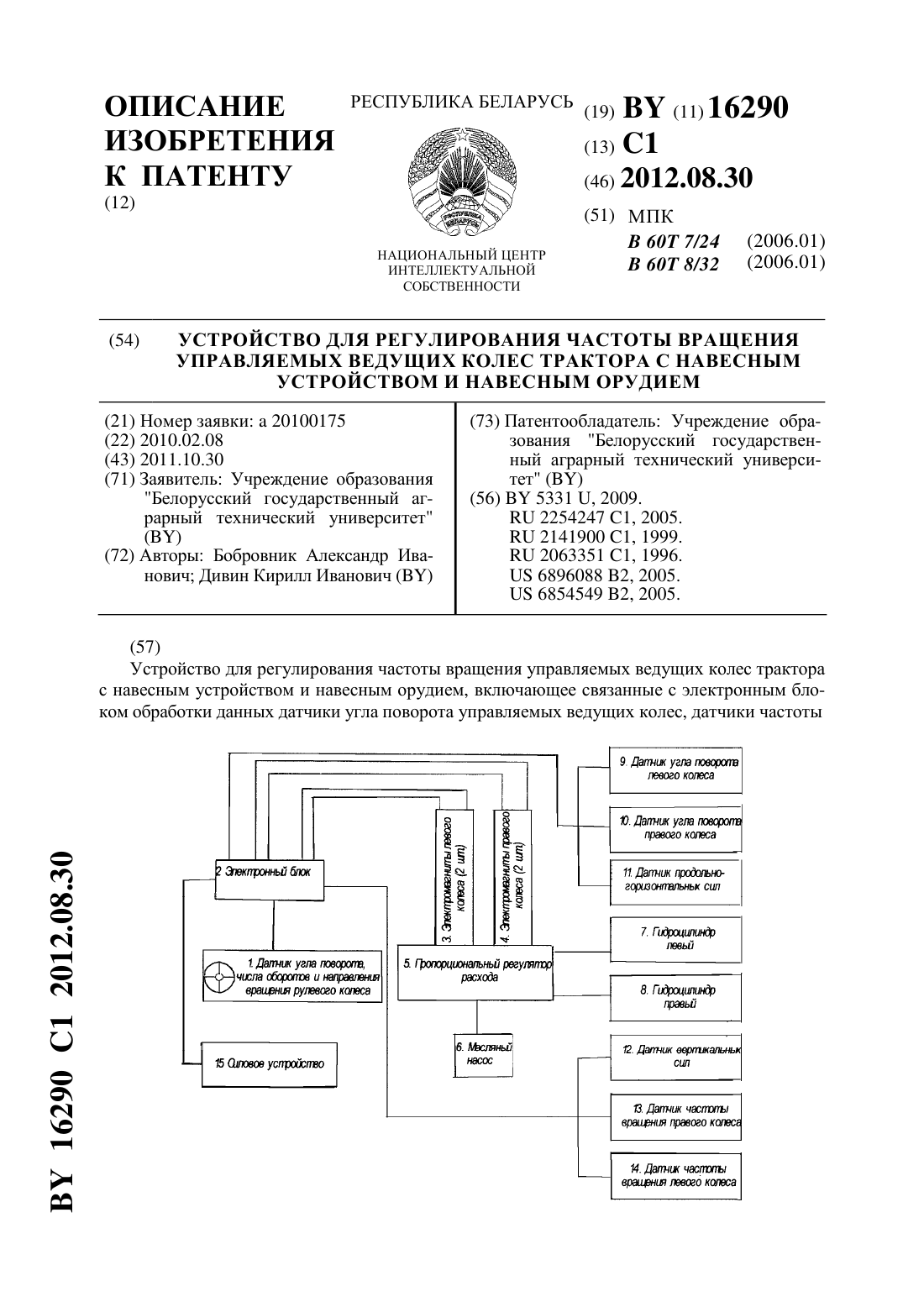
Номер патента: 16290
Опубликовано: 30.08.2012
Авторы: Бобровник Александр Иванович, Дивин Кирилл Иванович
Метки: устройство, орудием, колес, навесным, вращения, трактора, устройством, частоты, регулирования, управляемых, ведущих
Текст:
...известного устройство является нечувствительность системы при смещении линии тяги, что приводит к изменению траектории движения агрегата. Задачей изобретения является улучшение управляемости агрегата при криволинейном движении трактора с ассиметричной нагрузкой. Поставленная задача решается тем, что устройство для регулирования частоты вращения управляемых ведущих колес трактора с навесным устройством и навесным орудием,включающее...
Предыдущий патент: Способ прогнозирования риска возникновения пищеводно-желудочного кровотечения у ребенка с подпеченочной портальной гипертензией
Следующий патент: Способ контроля прочности на сдвиг напрессованного кольца подшипника на шейке оси колесной пары и устройство для его осуществления
Случайный патент: Способ получения плазмиды, кодирующей активатор плазминогена