Противобуксовочная система колесной машины
Номер патента: U 5939
Опубликовано: 28.02.2010
Авторы: Высоцкий Михаил Степанович, Дубовик Дмитрий Александрович, Лисичик Александр Сергеевич
Текст
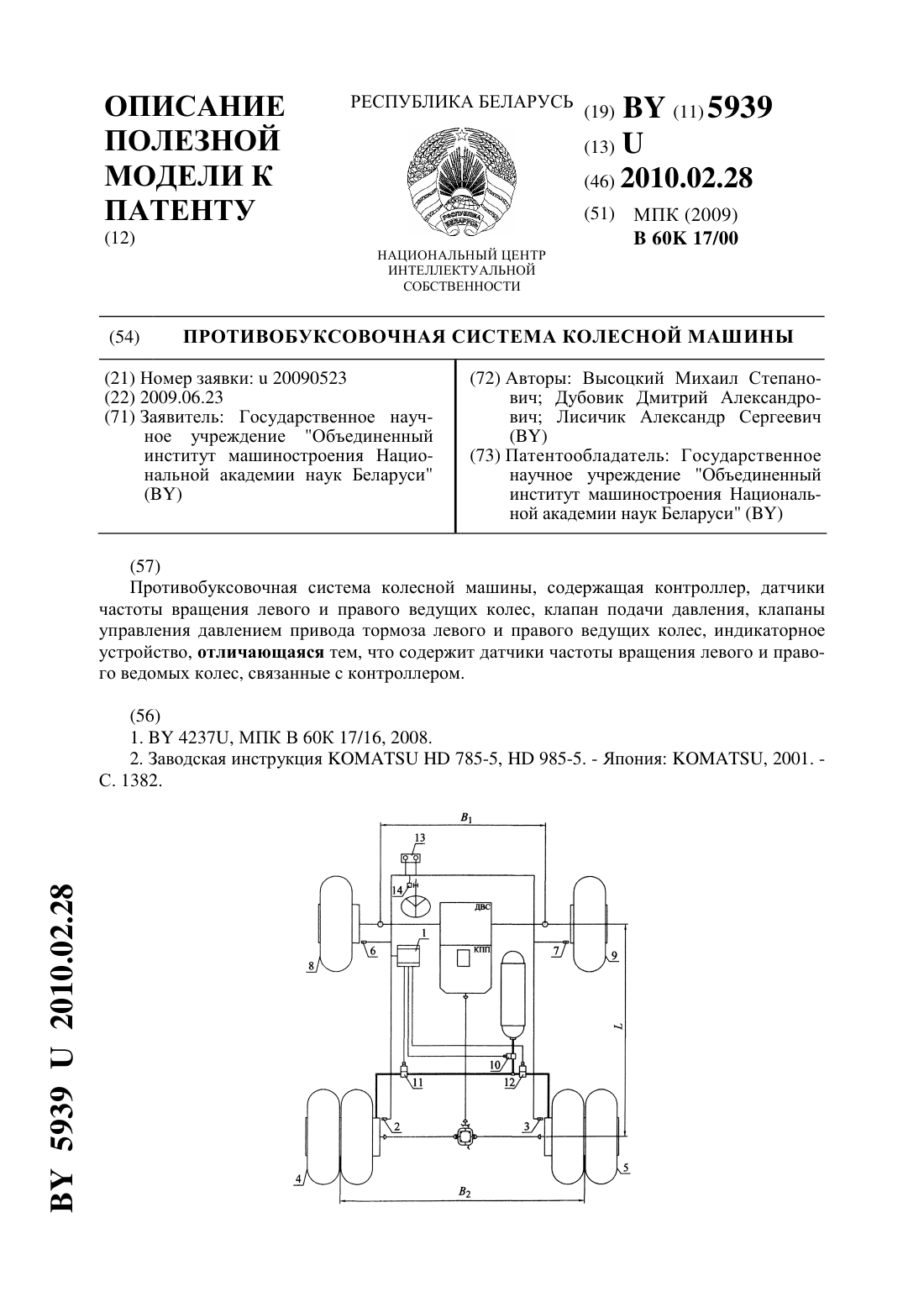
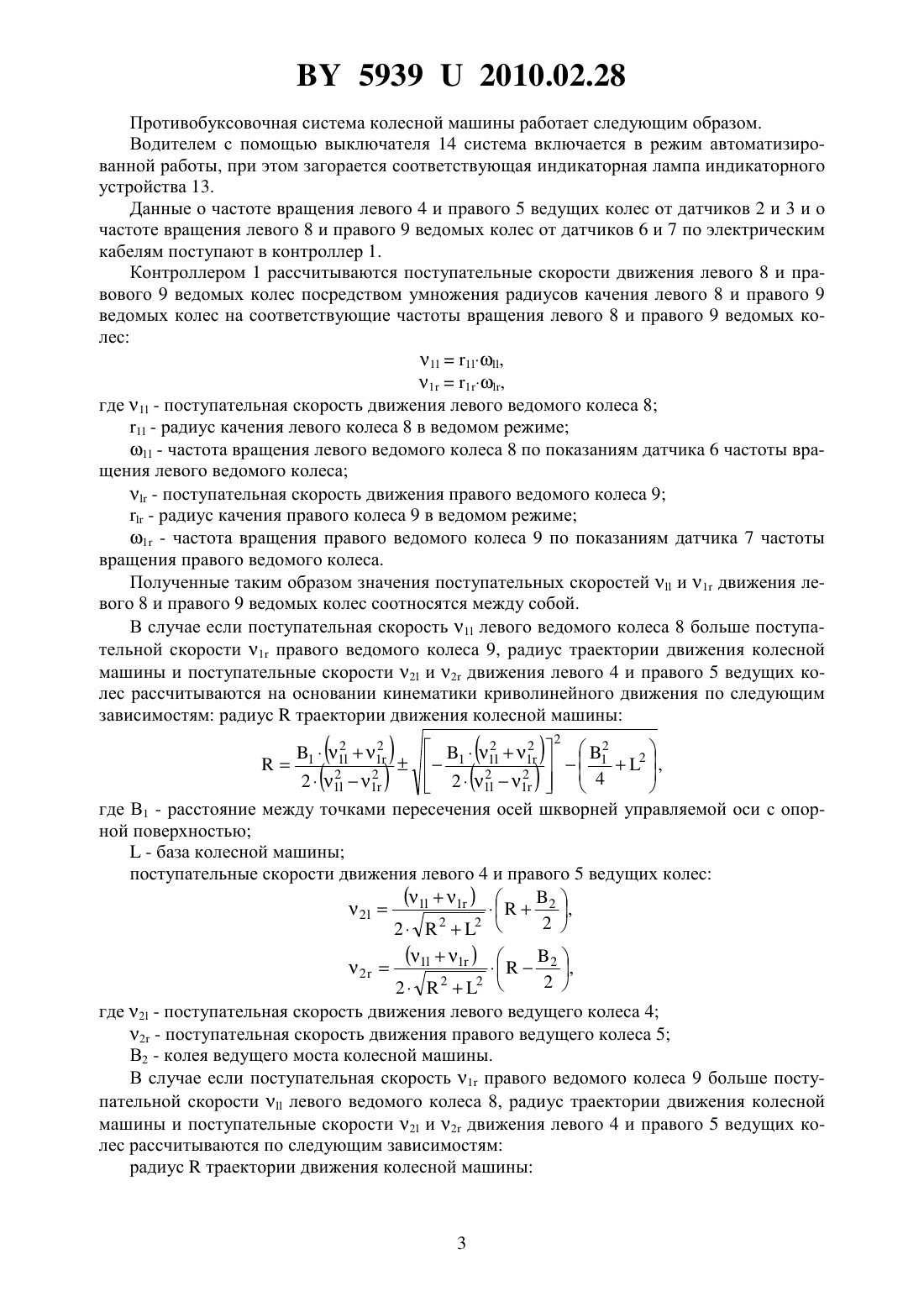
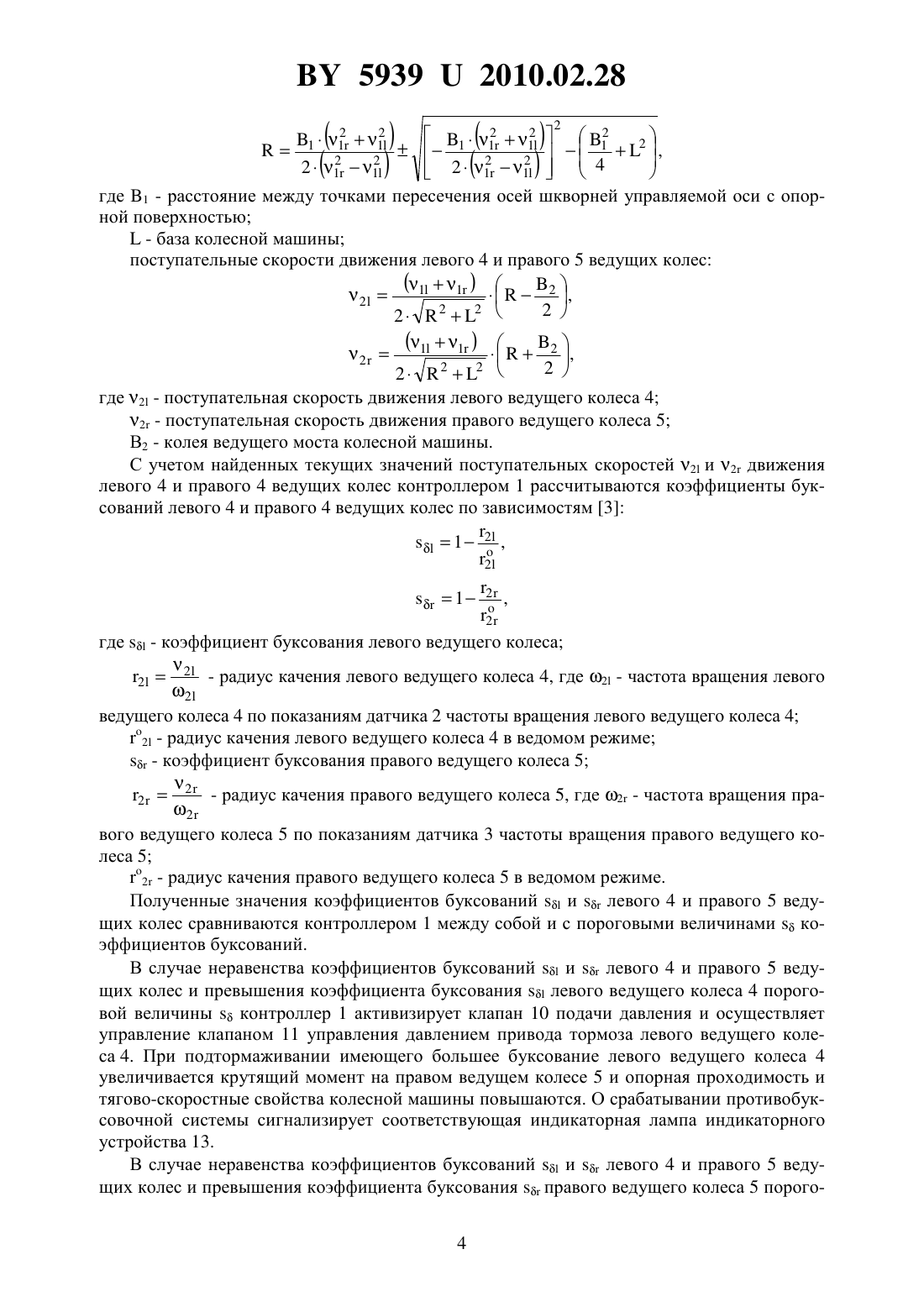
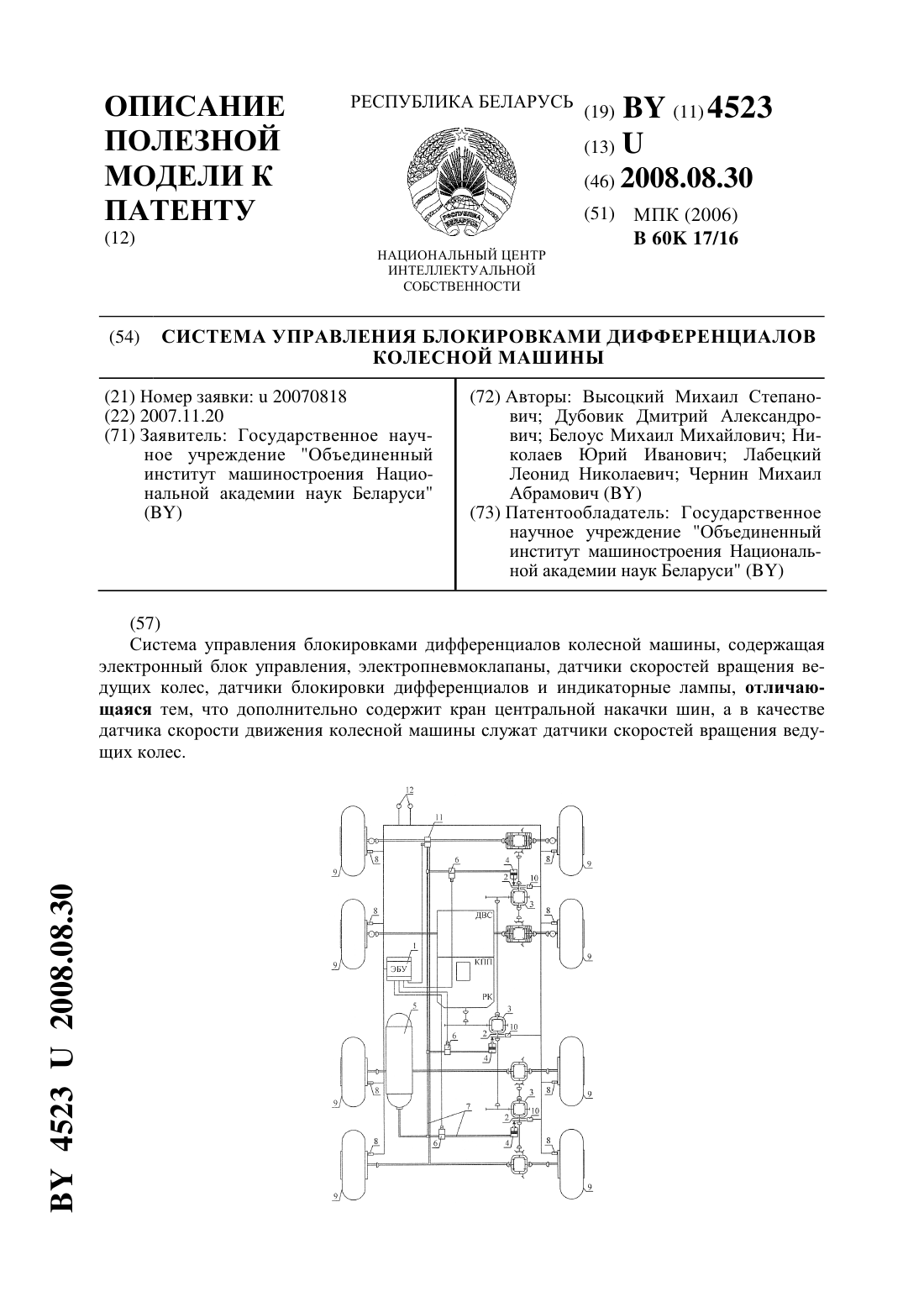
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ПРОТИВОБУКСОВОЧНАЯ СИСТЕМА КОЛЕСНОЙ МАШИНЫ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Высоцкий Михаил Степанович Дубовик Дмитрий Александрович Лисичик Александр Сергеевич(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Противобуксовочная система колесной машины, содержащая контроллер, датчики частоты вращения левого и правого ведущих колес, клапан подачи давления, клапаны управления давлением привода тормоза левого и правого ведущих колес, индикаторное устройство, отличающаяся тем, что содержит датчики частоты вращения левого и правого ведомых колес, связанные с контроллером. 59392010.02.28 3. Лефаров, А.Х. Энергонагруженность и надежность дифференциальных механизмов транспортно-тяговых машин / А.Х. Лефаров, М.С. Высоцкий, В.В. Ванцевич, В.И. Кабанов. - Минск Наука и техника, 1991. - С. 240. Полезная модель относится к машиностроению и может быть использована в качестве противобуксовочной системы колесной машины. Известна система управления блокировками дифференциалов колесной машины, содержащая электронный блок управления, электропневмоклапаны, датчики скоростей вращения, датчики блокировки дифференциалов и индикаторные лампы, датчик поворота управляемых колес 1. В качестве датчика скорости движения колесной машины в данной системе служат датчики скоростей вращения ведущих колес. Недостатком системы управления блокировками дифференциалов является то, что блокирование дифференциалов привода ведущих колес ухудшает поворачиваемость и вызывает циркуляцию мощности. В результате возникновения последней снижаются опорная проходимость и тягово-скоростные свойства колесной машины. Наиболее близким аналогом к предлагаемому техническому решению является автоматический регулятор вращения колес колесной машины, содержащий контроллер, датчик угла поворота рулевого колеса, датчики частоты вращения левого и правого ведущих колес, клапан подачи давления, клапаны управления давлением привода тормоза левого и правого ведущих колес, индикаторное устройство 2. Автоматический регулятор вращения колес не предусматривает блокировку дифференциалов, а осуществляет управление тормозными механизмами левого и правого ведущих колес, что предотвращает ухудшение поворачиваемости и обеспечивает повышение опорной проходимости и тягово-скоростных свойств. Недостатком автоматического регулятора вращения колесявляется то, что он содержит сложно компонуемый в конструкцию рулевого управления датчик угла поворота рулевого колеса, по показаниям которого контроллером рассчитываются текущее значение радиуса (кривизны) траектории движения колесной машины и теоретические поступательные скорости движения левого и правого ведущих колес. Предлагаемая полезная модель направлена на решение задачи замещения датчика угла поворота рулевого колеса посредством установки датчиков частоты вращения левого и правого ведомых колес и обработки их данных. Решение поставленной задачи достигается тем, что противобуксовочная система колесной машины содержит контроллер, датчики частоты вращения левого и правого ведущих колес, клапан подачи давления, клапаны управления давлением привода тормоза левого и правого ведущих колес, индикаторное устройство, причем, согласно техническому решению, содержит датчики частоты вращения левого и правого ведомых колес, связанные с контроллером. Сущность полезной модели поясняется схемой противобуксовочной системы колесной машины, приведенной на чертеже. Противобуксовочная система колесной машины содержит контроллер 1, датчики 2 и 3 частоты вращения левого 4 и правого 5 ведущих колес, датчики 6 и 7 частоты вращения левого 8 и правого 9 ведомых колес, клапан 10 подачи давления, клапаны 11 и 12 управления давлением привода тормоза левого 4 и правого 5 ведущих колес, индикаторное устройство 13, выключатель 14. Датчики 2 и 3 частоты вращения левого 4 и правого 5 ведущих колес, датчики 6 и 7 частоты вращения левого 8 и правого 9 ведомых колес, клапан 10 подачи давления, клапаны 11 и 12 управления давлением привода тормоза левого 4 и правого 5 ведущих колес,индикаторное устройство 13 и выключатель 14 с помощью электрических кабелей (не обозначены) связаны с контроллером 1. 2 59392010.02.28 Противобуксовочная система колесной машины работает следующим образом. Водителем с помощью выключателя 14 система включается в режим автоматизированной работы, при этом загорается соответствующая индикаторная лампа индикаторного устройства 13. Данные о частоте вращения левого 4 и правого 5 ведущих колес от датчиков 2 и 3 и о частоте вращения левого 8 и правого 9 ведомых колес от датчиков 6 и 7 по электрическим кабелям поступают в контроллер 1. Контроллером 1 рассчитываются поступательные скорости движения левого 8 и правового 9 ведомых колес посредством умножения радиусов качения левого 8 и правого 9 ведомых колес на соответствующие частоты вращения левого 8 и правого 9 ведомых колес 11,11,где 1 - поступательная скорость движения левого ведомого колеса 8 1 - радиус качения левого колеса 8 в ведомом режиме 1 - частота вращения левого ведомого колеса 8 по показаниям датчика 6 частоты вращения левого ведомого колеса- поступательная скорость движения правого ведомого колеса 9- радиус качения правого колеса 9 в ведомом режиме 1 - частота вращения правого ведомого колеса 9 по показаниям датчика 7 частоты вращения правого ведомого колеса. Полученные таким образом значения поступательных скоростейи 1 движения левого 8 и правого 9 ведомых колес соотносятся между собой. В случае если поступательная скорость 1 левого ведомого колеса 8 больше поступательной скорости 1 правого ведомого колеса 9, радиус траектории движения колесной машины и поступательные скорости 2 и 2 движения левого 4 и правого 5 ведущих колес рассчитываются на основании кинематики криволинейного движения по следующим зависимостям радиустраектории движения колесной машины где В 1 - расстояние между точками пересечения осей шкворней управляемой оси с опорной поверхностью- база колесной машины поступательные скорости движения левого 4 и правого 5 ведущих колес 2 ,2222 где 2 - поступательная скорость движения левого ведущего колеса 4 2 - поступательная скорость движения правого ведущего колеса 5 В 2 - колея ведущего моста колесной машины. В случае если поступательная скорость 1 правого ведомого колеса 9 больше поступательной скоростилевого ведомого колеса 8, радиус траектории движения колесной машины и поступательные скорости 2 и 2 движения левого 4 и правого 5 ведущих колес рассчитываются по следующим зависимостям радиустраектории движения колесной машины 2 где 1 - расстояние между точками пересечения осей шкворней управляемой оси с опорной поверхностью- база колесной машины поступательные скорости движения левого 4 и правого 5 ведущих колес 2 ,22 где 2 - поступательная скорость движения левого ведущего колеса 4 2 - поступательная скорость движения правого ведущего колеса 5 В 2 - колея ведущего моста колесной машины. С учетом найденных текущих значений поступательных скоростей 2 и 2 движения левого 4 и правого 4 ведущих колес контроллером 1 рассчитываются коэффициенты буксований левого 4 и правого 4 ведущих колес по зависимостям 3, 2 где- коэффициент буксования левого ведущего колеса 22 - радиус качения левого ведущего колеса 4, где 2 - частота вращения левого 2 ведущего колеса 4 по показаниям датчика 2 частоты вращения левого ведущего колеса 4 2 - радиус качения левого ведущего колеса 4 в ведомом режиме- коэффициент буксования правого ведущего колеса 5 22- радиус качения правого ведущего колеса 5, где 2 - частота вращения пра 2 вого ведущего колеса 5 по показаниям датчика 3 частоты вращения правого ведущего колеса 5 2 - радиус качения правого ведущего колеса 5 в ведомом режиме. Полученные значения коэффициентов буксованийилевого 4 и правого 5 ведущих колес сравниваются контроллером 1 между собой и с пороговыми величинамикоэффициентов буксований. В случае неравенства коэффициентов буксованийилевого 4 и правого 5 ведущих колес и превышения коэффициента буксованиялевого ведущего колеса 4 пороговой величиныконтроллер 1 активизирует клапан 10 подачи давления и осуществляет управление клапаном 11 управления давлением привода тормоза левого ведущего колеса 4. При подтормаживании имеющего большее буксование левого ведущего колеса 4 увеличивается крутящий момент на правом ведущем колесе 5 и опорная проходимость и тягово-скоростные свойства колесной машины повышаются. О срабатывании противобуксовочной системы сигнализирует соответствующая индикаторная лампа индикаторного устройства 13. В случае неравенства коэффициентов буксованийилевого 4 и правого 5 ведущих колес и превышения коэффициента буксованияправого ведущего колеса 5 порого 1 59392010.02.28 вой величиныконтроллер 1 активизирует клапан 10 подачи давления и осуществляет управление клапаном 12 управления давлением привода тормоза правого ведущего колеса 5. При подтормаживании имеющего большее буксование правого ведущего колеса 5 увеличивается крутящий момент на левом ведущем колесе 4 и опорная проходимость и тягово-скоростные свойства колесной машины повышаются. О срабатывании противобуксовочной системы сигнализирует соответствующая индикаторная лампа индикаторного устройства 13. Описанный алгоритм работы противобуксовочной системы колесной машины постоянно повторяется. Выключается противобуксовочная система колесной машины с помощью выключателя 14. С выключением противобуксовочной системы гаснет соответствующая индикаторная лампа на индикаторном устройстве 13. Таким образом, предлагаемая противобуксовочная система колесной машины при сохранении своих функциональных возможностей позволяет исключить сложно компонуемый в конструкцию рулевого управления датчик угла поворота рулевого колеса на основе использования датчиков частоты вращения левого и правого ведомых колес, получивших широкое применение в антиблокировочных системах тормозов, и обработки их показаний. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60K 17/00
Метки: колесной, машины, противобуксовочная, система
Код ссылки
<a href="https://by.patents.su/5-u5939-protivobuksovochnaya-sistema-kolesnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Противобуксовочная система колесной машины</a>
Система управления блокировками дифференциалов колесной машины
Номер патента: U 4189
Опубликовано: 28.02.2008
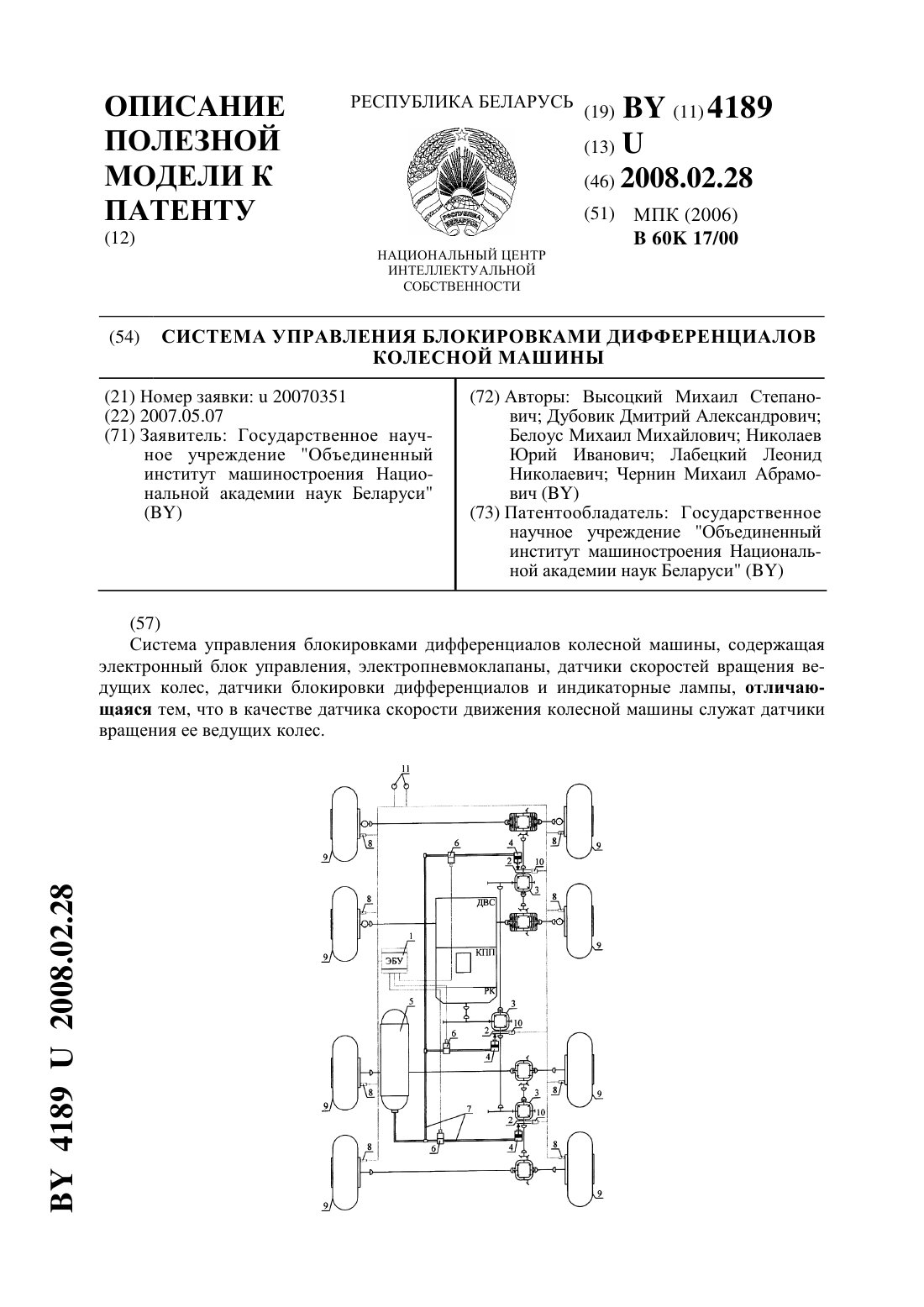
Авторы: Дубовик Дмитрий Александрович, Высоцкий Михаил Степанович, Николаев Юрий Иванович, Лабецкий Леонид Николаевич, Белоус Михаил Михайлович, Чернин Михаил Абрамович
МПК: B60K 17/00
Метки: блокировками, управления, система, дифференциалов, колесной, машины
Текст:
...скорости движения колесной машины заданной пороговой величины, определяемой датчиком скорости движения. При этом давление в пневмоцилиндре механизма блокировки дифференциала падает и дифференциал разблокируется, и сигналы от датчиков скоростей вращения снова начинают поступать и обрабатываться в электронном блоке управления. Недостатком данной системы управления блокировками дифференциалов колесных машин является повышенная сложность...
Система управления блокировками дифференциалов колесной машины
Номер патента: U 3413
Опубликовано: 30.04.2007
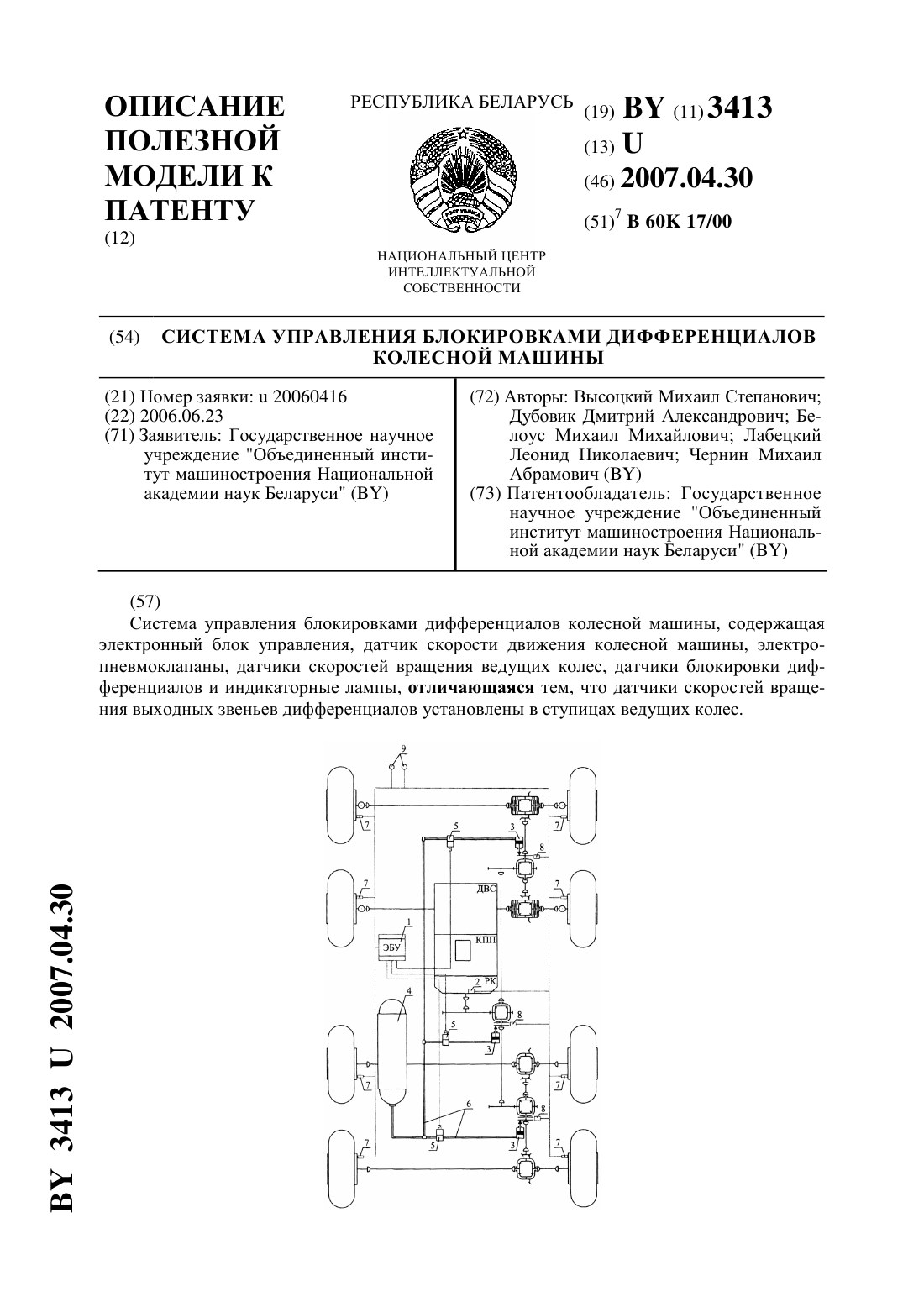
Авторы: Белоус Михаил Михайлович, Высоцкий Михаил Степанович, Чернин Михаил Абрамович, Дубовик Дмитрий Александрович, Лабецкий Леонид Николаевич
МПК: B60K 17/00
Метки: дифференциалов, машины, блокировками, система, управления, колесной
Текст:
...управления выдается сигнал на подвод сжатого воздуха из ресивера к механизмам блокировки, в результате чего осуществляется блокировка дифференциала. Недостатком данной системы управления блокировками дифференциалов является недостаточно высокая точность измерения частоты вращения элементов привода колес. Предлагаемая полезная модель направлена на решение задачи повышения точности измерения угловых скоростей вращения ведущих колес за счет...
Система управления блокировками дифференциалов колесной машины
Номер патента: U 4237
Опубликовано: 28.02.2008
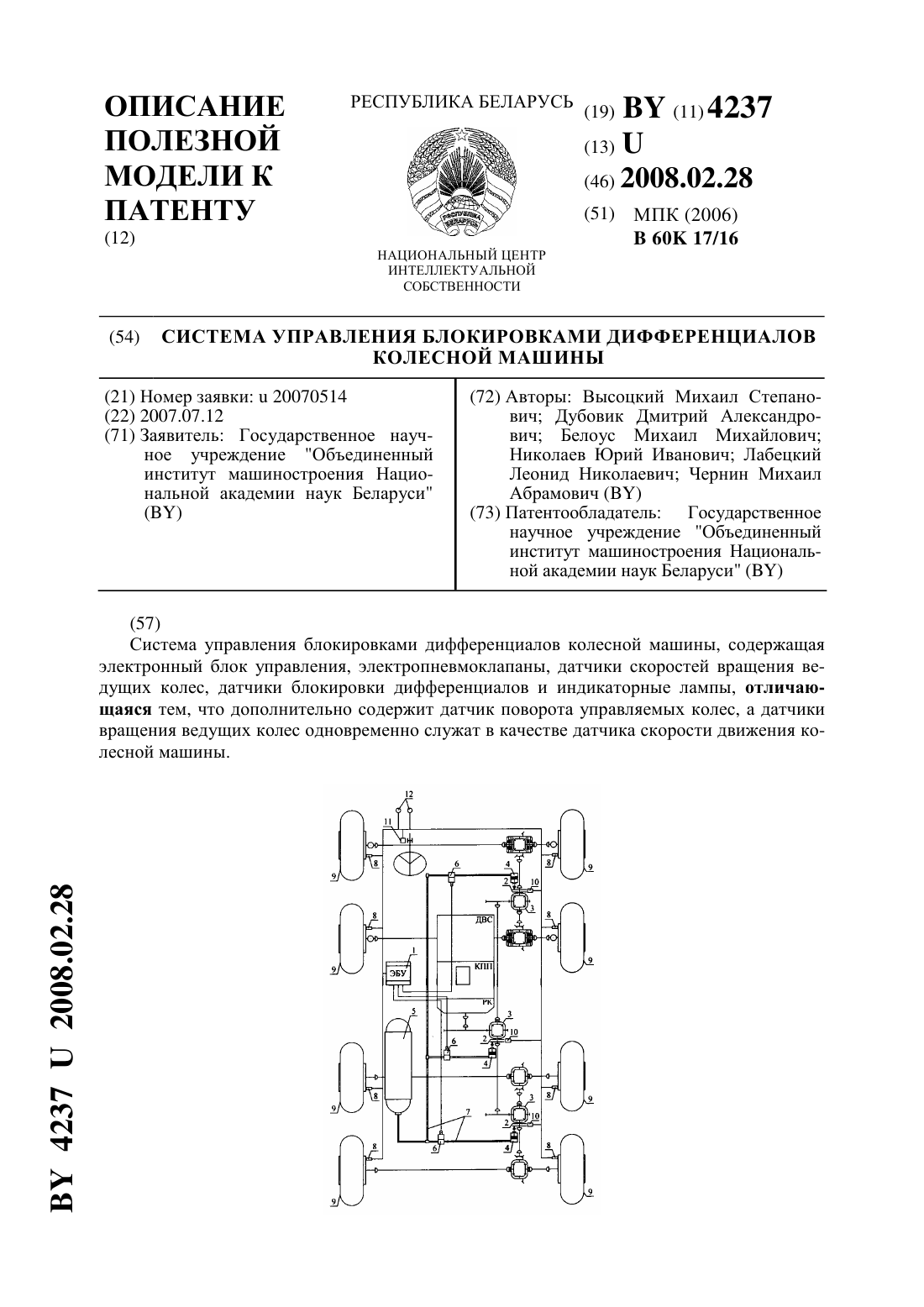
Авторы: Чернин Михаил Абрамович, Дубовик Дмитрий Александрович, Лабецкий Леонид Николаевич, Белоус Михаил Михайлович, Николаев Юрий Иванович, Высоцкий Михаил Степанович
МПК: B60K 17/16
Метки: управления, система, дифференциалов, машины, колесной, блокировками
Текст:
...разблокирования дифференциалов. Предлагаемая полезная модель направлена на решение задачи улучшения управляемости колесной машины за счет разблокирования дифференциалов при достижении текущих значений углов поворота управляемых колес или же рулевого колеса пороговых величин. Решение поставленной задачи достигается тем, что система управления блокировками дифференциалов колесных машин содержит электронный блок управления,...
Система управления блокировками дифференциалов колесной машины
Номер патента: U 4523
Опубликовано: 30.08.2008
Авторы: Чернин Михаил Абрамович, Высоцкий Михаил Степанович, Николаев Юрий Иванович, Дубовик Дмитрий Александрович, Лабецкий Леонид Николаевич, Белоус Михаил Михайлович
МПК: B60K 17/16
Метки: блокировками, управления, машины, дифференциалов, колесной, система
Текст:
...на решение задачи повышения эффективности системы управления блокировками дифференциалов колесных машин за счет целенаправленного регулирования давления воздуха в шинах ведущих колес в результате интегрирования системы управления блокировками дифференциалов с системой центральной накачки шин. Решение поставленной задачи достигается тем, что система управления блокировками дифференциалов колесных машин содержит электронный блок...
Способ управления блокировками дифференциалов многоприводной колесной машины
Номер патента: 12513
Опубликовано: 30.10.2009
Авторы: Высоцкий Михаил Степанович, Белоус Михаил Михайлович, Дубовик Дмитрий Александрович
МПК: B60K 17/34, F16H 48/00, B60K 17/16...
Метки: колесной, блокировками, способ, дифференциалов, управления, машины, многоприводной
Текст:
...7- мощность, расходуемая ходовой системой на осуществление движения машины в направлении, задаваемом водителем поворотом рулевого колеса, Вт- мощность, передаваемая ходовой системе, Вти- мощность, расходуемая соответственно левым и правым колесами -го моста на осуществление движения машины в направлении, задаваемом водителем поворотом рулевого колеса (знакииотносятся соответственно к правому и левому колесу моста), Вти- мощность, подведенная...
Предыдущий патент: Мешалка лопастная биореактора для культивирования клеток и вирусов
Следующий патент: Сборный резец
Случайный патент: Устройство для исследования дисперсионных свойств прозрачных объектов