Устройство управления движением транспортного средства
Номер патента: U 786
Опубликовано: 30.03.2003
Авторы: Головач Виталий Михайлович, Горин Геннадий Степанович
Текст
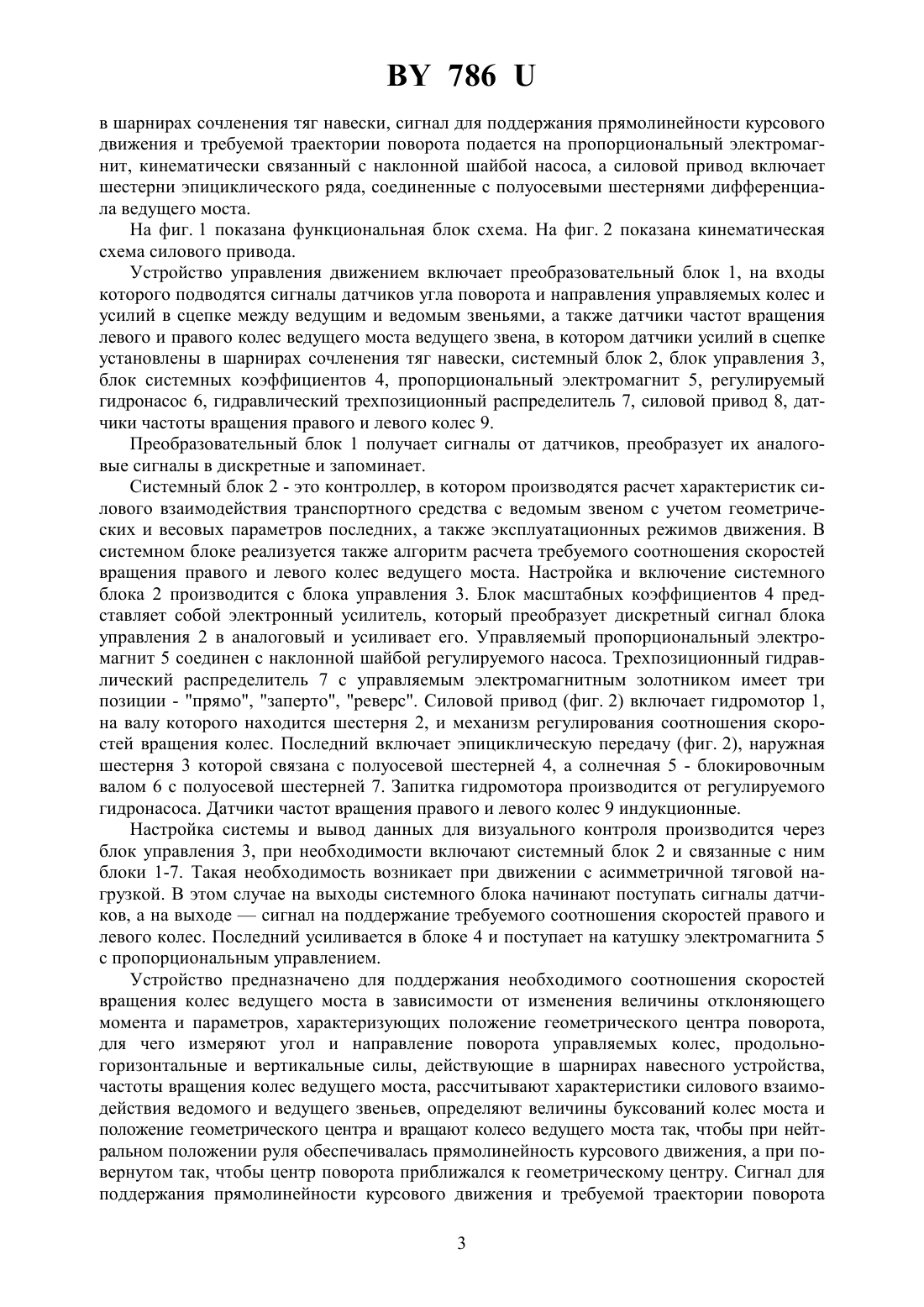
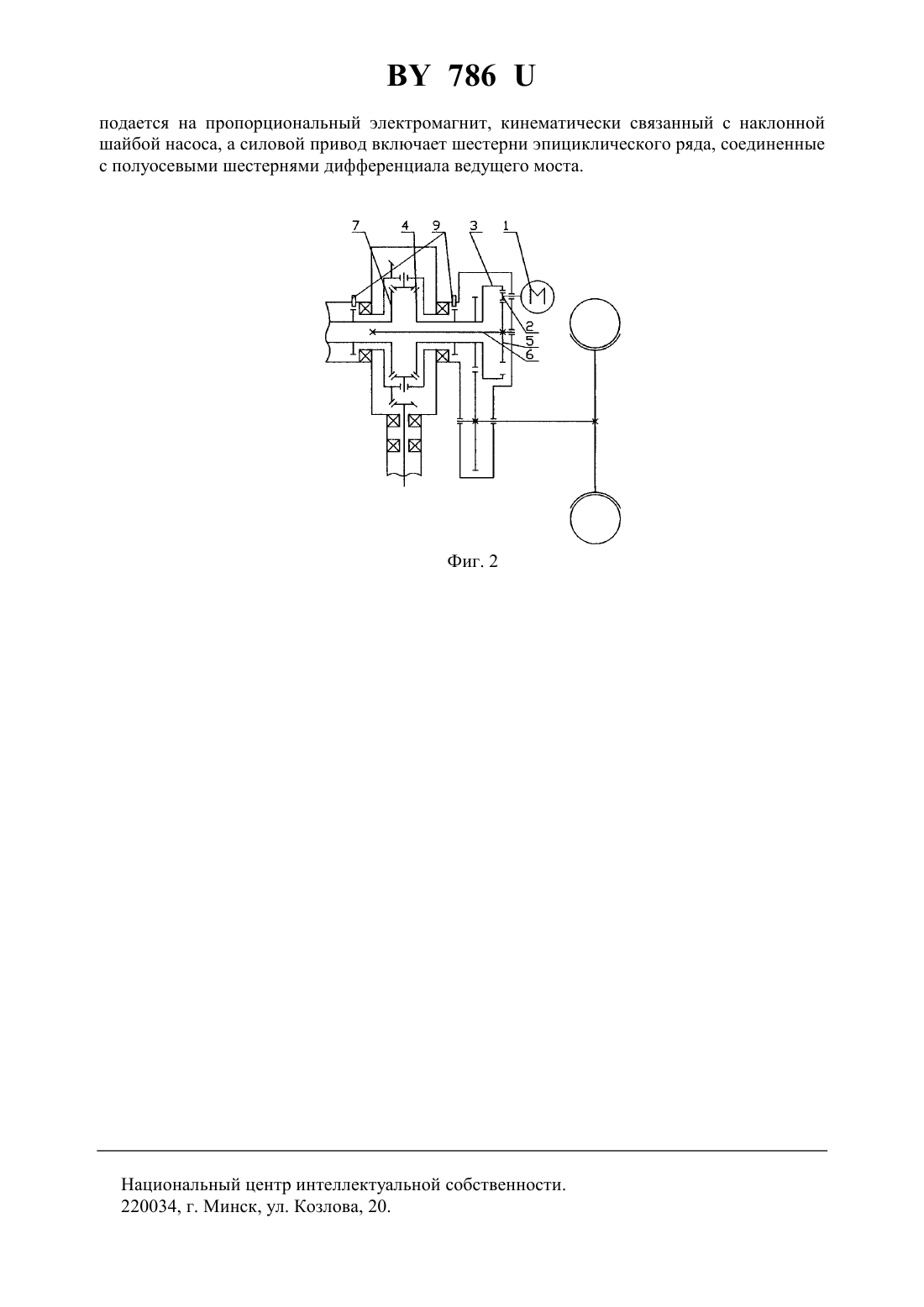
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Белорусский государственный аграрный технический университет(72) Авторы Горин Геннадий Степанович Головач Виталий Михайлович(73) Патентообладатель Белорусский государственный аграрный технический университет(57) Устройство управления движением транспортного средства, содержащее датчик угла поворота и направления управляемых колес и усилий в сцепке между ведущим и ведомым звеньями, а также датчики частот вращения левого и правого колес ведущего моста ведущего звена, отличающееся тем, что датчики усилий в сцепке установлены в шарнирах сочленения тяг навески, сигнал для поддержания прямолинейности курсового движения и требуемой траектории поворота подается на пропорциональный электромагнит, кинематически связанный с наклонной шайбой насоса, а силовой привод включает шестерни эпициклического ряда, соединенные с полуосевыми шестернями дифференциала ведущего моста. 786 Полезная модель относится к транспортному машиностроению и касается систем управления межколесным дифференциалом транспортных средств, в частности тракторов,движущихся на склоне или с тяговой нагрузкой, приложенной несимметрично относительно колес. Известны устройства для стабилизации прямолинейности курсового движения транспортного средства путем применения межколесных дифференциалов повышенного трения или блокирования последних. Использование названых устройств не позволяет достичь строгой прямолинейности курсового движения, но ухудшает характеристики поворачиваемости транспортного средства. Названные межколесные дифференциалы и блокировки перераспределяют крутящие моменты так, что внутренние (к центру скоростей) колеса перегружаются, что вызывает рост радиуса поворота. Оптимальным является такое распределение крутящих моментов, когда при повороте большой крутящий момент подводится к внешним колесам (по отношению к центру скоростей), при прямолинейном движении - к колесу, в сторону которого смещена тяговая нагрузка, а при прямолинейном движении по косогору - к колесу, которое расположено ниже по склону. У транспортных средств типа трактора МТЗ-822, движущихся с несимметричной тяговой нагрузкой и на склоне, обычно межколесный дифференциал блокируют при повороте руля на угол более 10, датчик положения руля перекрывает подвод жидкости к блокирующей муфте межколесного дифференциала. Тем самым последний разблокируют. Недостатком такого транспортного средства является то, что прямолинейное движение с асимметричной тяговой нагрузкой возможно только если правые колеса следуют по дну борозды. При повороте с тяговой нагрузкой его разворачивает. При этом внешние колеса разгружаются и склонны к повышенному буксованию, а это снижает проходимость транспортного средства. По своей технической сути к предлагаемой модели близок способ управления движения активного многозвенного транспортного средства и устройство для его осуществления 1. Известный способ управления движением заключается в том, что управляемые колеса ведомого звена поворачивают на угол, зависящий от изменения величин измеряемых параметров, характеризующих положение мгновенного центра скоростей, чем достигается снижение энергозатрат при повороте транспортного средства и уменьшение бокового скольжения колес ведомого звена за счет точного согласования кинематики поворота ведущего и ведомого звеньев, для этого измеряют угол складывания звеньев и тяговую нагрузку в шарнире сочленения, определяют продольное смещение мгновенного центра скоростей относительно положения, заданного в статике, и поворачивают управляемые колеса ведомого звена на угол, при котором оси вращения этих колес проходят через мгновенный центр скоростей. Недостатком известного устройства является то, что он во-первых, не предлагает метода исправления траектории поворота с целью сближения следов передних и задних колес, а следовательно, уменьшение транспортного коридора при действии и изменении отклоняющего момента во-вторых, не предлагают метода поддержания прямолинейности курсового движения при действии и изменении отклоняющего момента. Задачей модели является стабилизация прямолинейности курсового движения транспортного средства при нейтральном положении руля и сближение следов передних и задних колес при повернутом для уменьшения транспортного коридора путем поддержания необходимого соотношения скоростей вращения внешних и внутренних колес. Названная задача решается устройством управления движением транспортного средства, которое содержит датчик угла поворота и направления управляемых колес и усилий в сцепке между ведущим и ведомым звеньями, а также датчики частот вращения левого и правого колес ведущего моста ведущего звена, где датчики усилий в сцепке установлены 2 786 в шарнирах сочленения тяг навески, сигнал для поддержания прямолинейности курсового движения и требуемой траектории поворота подается на пропорциональный электромагнит, кинематически связанный с наклонной шайбой насоса, а силовой привод включает шестерни эпициклического ряда, соединенные с полуосевыми шестернями дифференциала ведущего моста. На фиг. 1 показана функциональная блок схема. На фиг. 2 показана кинематическая схема силового привода. Устройство управления движением включает преобразовательный блок 1, на входы которого подводятся сигналы датчиков угла поворота и направления управляемых колес и усилий в сцепке между ведущим и ведомым звеньями, а также датчики частот вращения левого и правого колес ведущего моста ведущего звена, в котором датчики усилий в сцепке установлены в шарнирах сочленения тяг навески, системный блок 2, блок управления 3,блок системных коэффициентов 4, пропорциональный электромагнит 5, регулируемый гидронасос 6, гидравлический трехпозиционный распределитель 7, силовой привод 8, датчики частоты вращения правого и левого колес 9. Преобразовательный блок 1 получает сигналы от датчиков, преобразует их аналоговые сигналы в дискретные и запоминает. Системный блок 2 - это контроллер, в котором производятся расчет характеристик силового взаимодействия транспортного средства с ведомым звеном с учетом геометрических и весовых параметров последних, а также эксплуатационных режимов движения. В системном блоке реализуется также алгоритм расчета требуемого соотношения скоростей вращения правого и левого колес ведущего моста. Настройка и включение системного блока 2 производится с блока управления 3. Блок масштабных коэффициентов 4 представляет собой электронный усилитель, который преобразует дискретный сигнал блока управления 2 в аналоговый и усиливает его. Управляемый пропорциональный электромагнит 5 соединен с наклонной шайбой регулируемого насоса. Трехпозиционный гидравлический распределитель 7 с управляемым электромагнитным золотником имеет три позиции - прямо, заперто, реверс. Силовой привод (фиг. 2) включает гидромотор 1,на валу которого находится шестерня 2, и механизм регулирования соотношения скоростей вращения колес. Последний включает эпициклическую передачу (фиг. 2), наружная шестерня 3 которой связана с полуосевой шестерней 4, а солнечная 5 - блокировочным валом 6 с полуосевой шестерней 7. Запитка гидромотора производится от регулируемого гидронасоса. Датчики частот вращения правого и левого колес 9 индукционные. Настройка системы и вывод данных для визуального контроля производится через блок управления 3, при необходимости включают системный блок 2 и связанные с ним блоки 1-7. Такая необходимость возникает при движении с асимметричной тяговой нагрузкой. В этом случае на выходы системного блока начинают поступать сигналы датчиков, а на выходесигнал на поддержание требуемого соотношения скоростей правого и левого колес. Последний усиливается в блоке 4 и поступает на катушку электромагнита 5 с пропорциональным управлением. Устройство предназначено для поддержания необходимого соотношения скоростей вращения колес ведущего моста в зависимости от изменения величины отклоняющего момента и параметров, характеризующих положение геометрического центра поворота,для чего измеряют угол и направление поворота управляемых колес, продольногоризонтальные и вертикальные силы, действующие в шарнирах навесного устройства,частоты вращения колес ведущего моста, рассчитывают характеристики силового взаимодействия ведомого и ведущего звеньев, определяют величины буксований колес моста и положение геометрического центра и вращают колесо ведущего моста так, чтобы при нейтральном положении руля обеспечивалась прямолинейность курсового движения, а при повернутом так, чтобы центр поворота приближался к геометрическому центру. Сигнал для поддержания прямолинейности курсового движения и требуемой траектории поворота 3 786 подается на пропорциональный электромагнит, кинематически связанный с наклонной шайбой насоса, а силовой привод включает шестерни эпициклического ряда, соединенные с полуосевыми шестернями дифференциала ведущего моста. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B62D 13/02
Метки: управления, устройство, средства, транспортного, движением
Код ссылки
<a href="https://by.patents.su/4-u786-ustrojjstvo-upravleniya-dvizheniem-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Устройство управления движением транспортного средства</a>
Устройство управления дверьми транспортного средства
Номер патента: U 479
Опубликовано: 30.03.2002
Авторы: Успенский Алексей Александрович, Павлович Александр Эдуардович, Успенский Александр Алексеевич
МПК: B60J 5/00
Метки: дверьми, транспортного, устройство, управления, средства
Текст:
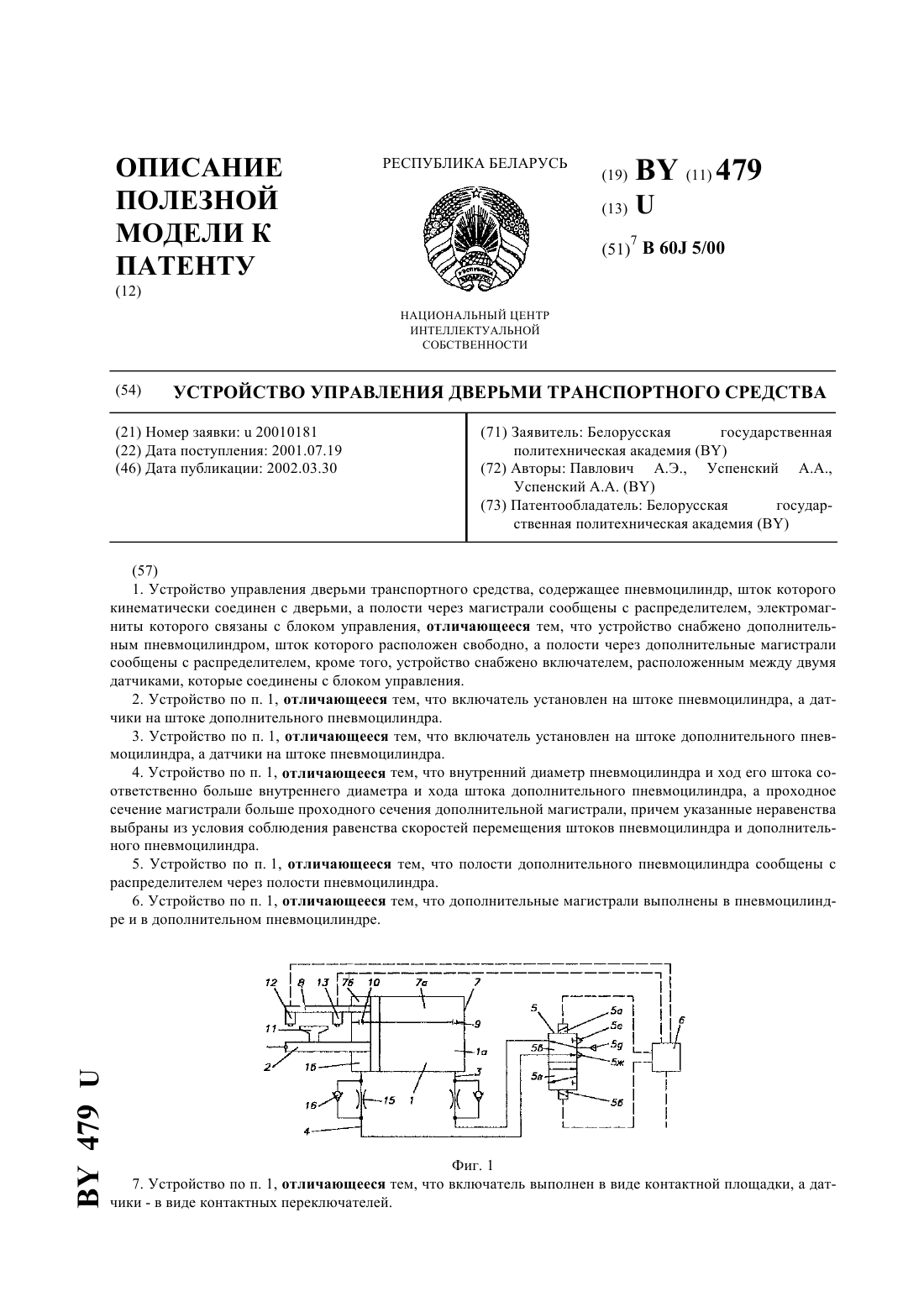
...режим движения штоков пневмоцилиндров в обратном направлении для предотвращения стопорения дверей. Все это повысит защитные свойства устройства от поломок дверей и от травмирования пассажиров. Сущность полезной модели поясняется иллюстрациями. 2 479 На фиг. 1 показана принципиальная схема устройства с контактными переключателями на фиг. 2 - то же,но с бесконтактными индуктивными переключателями на фиг. 3 - то же, но с бесконтактными...
Устройство управления коробкой передач транспортного средства с опрокидываемой кабиной
Номер патента: 3943
Опубликовано: 30.06.2001
Авторы: Захарик Андрей Михайлович, Торгонский Анатолий Романович, Евстратовский Александр Владимирович
МПК: B62D 33/073, B60K 20/02
Метки: управления, передач, кабиной, устройство, транспортного, опрокидываемой, коробкой, средства
Текст:
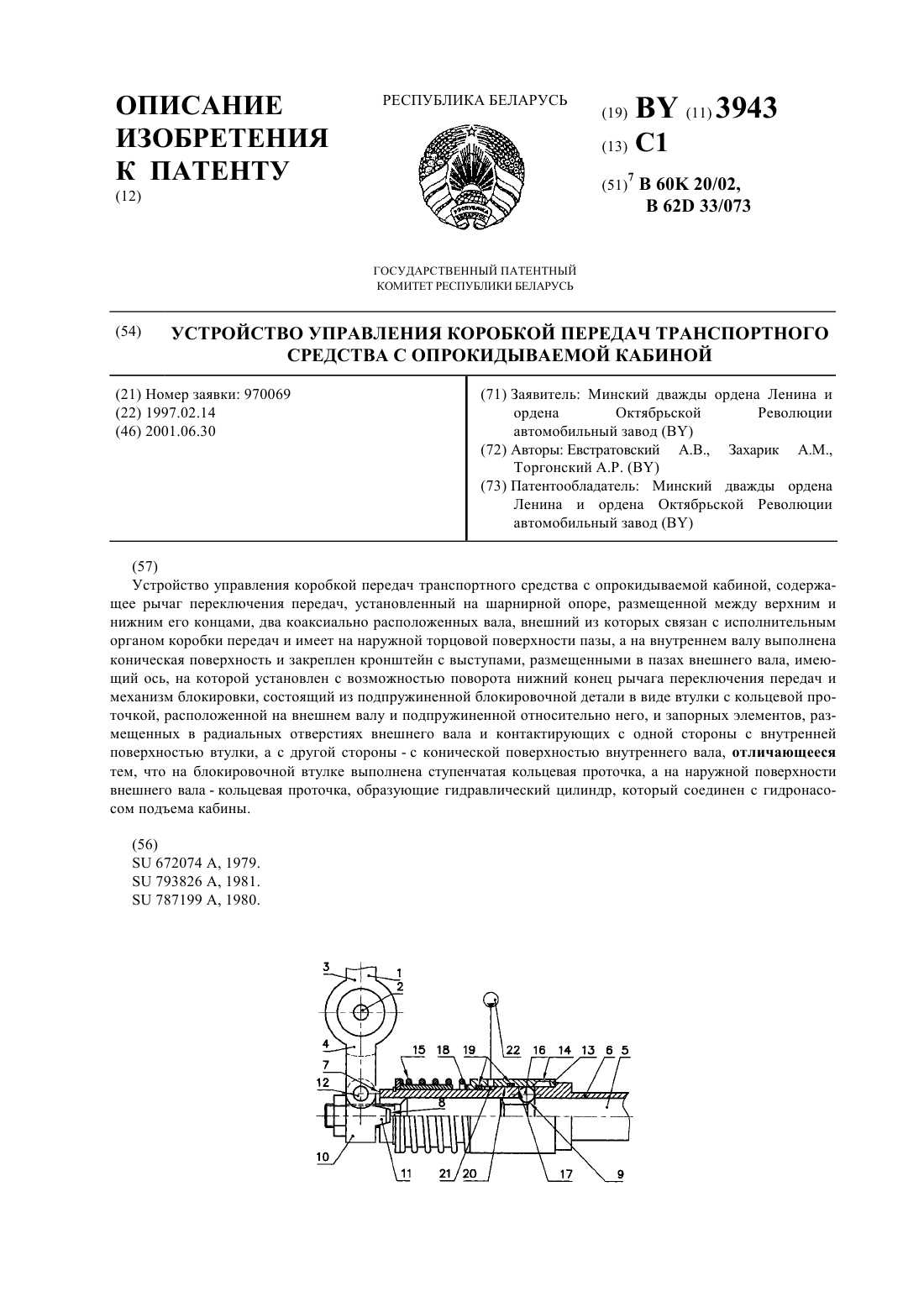
...повышение надежности конструкции. Поставленная задача выполняется благодаря тому, что в устройстве управления коробкой передач транспортного средства с опрокидываемой кабиной, содержащем рычаг переключения передач, установленный на шарнирной опоре, размещенной между верхним и нижним его концами, два коаксиально расположенных вала, внешний из которых связан с исполнительным органом коробки передач и имеет на наружной торцовой поверхности пазы,...
Устройство для автоматического управления электроприводом автономного транспортного средства
Номер патента: 59
Опубликовано: 30.09.1994
Авторы: Брискман Я. А., Шор М. Е., Андреев Ю. М.
МПК: B60L 11/04
Метки: управления, устройство, автономного, средства, автоматического, транспортного, электроприводом
Текст:
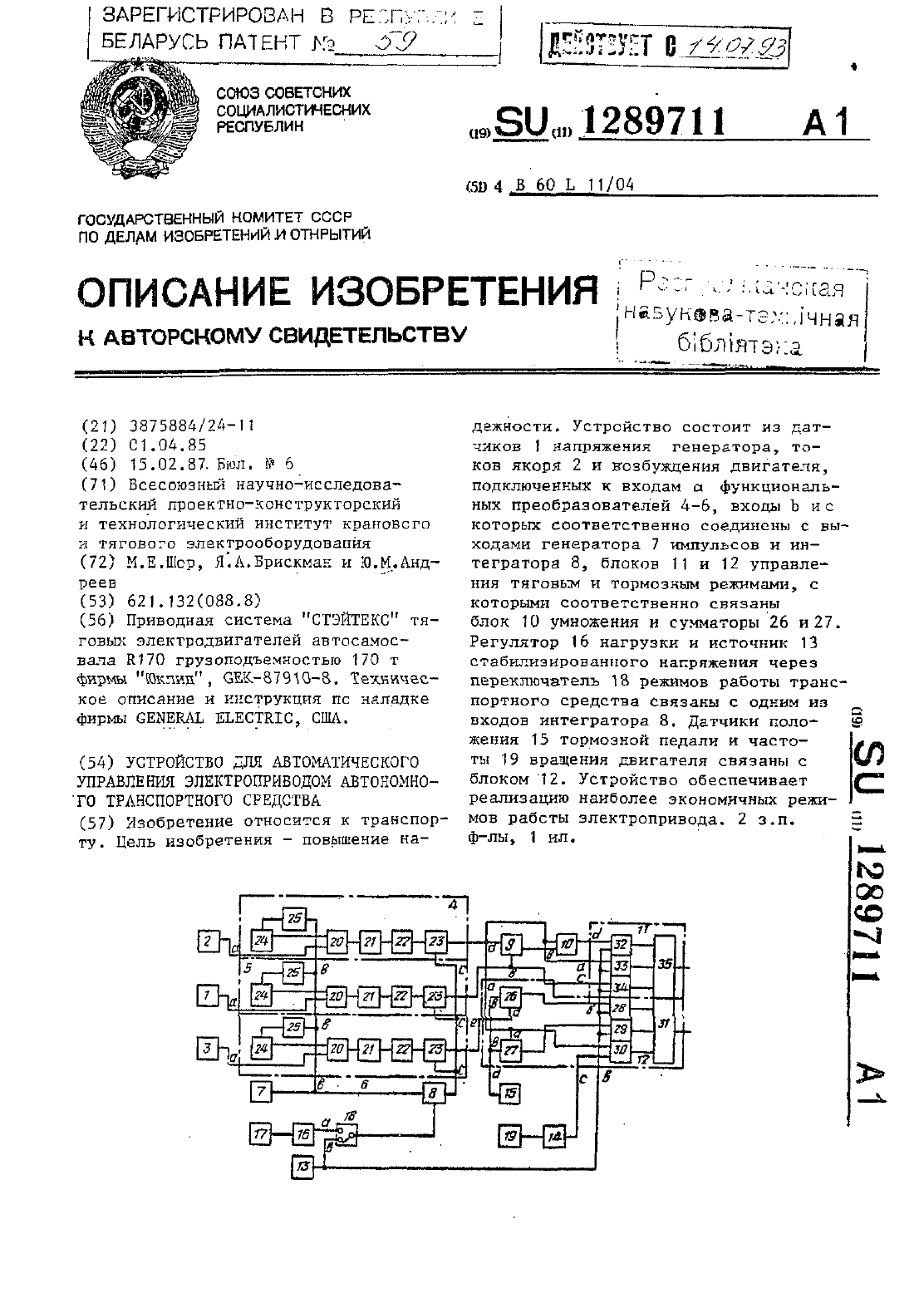
...16 нагрузки преобразует период частоты вращения теплового двигателя в напряжение ПСигнал напряжения, пропорционапьный периоду частоты Ед алгебраически суммируется с постоянным иапряжением которое-корректирует зависимость мощности злектроцвигателя Р от частоты ЕдДВеличина текущего значения вынодного напряжения интегратора 8 пропорциональна величине входного напряжения Сы При этом сигнал навыходе блока 23-памяти пропорционален величине...
Устройство управления процессом торможения транспортного средства
Номер патента: 2695
Опубликовано: 30.03.1999
Авторы: Ким Фридрих Андреевич, Ким Валерий Андреевич, Портасенок Владимир Станиславович, Бочкарев Геннадий Владимирович, Лобах Василий Павлович, Фурунжиев Решат Ибраимович
МПК: B60T 8/52
Метки: устройство, средства, транспортного, управления, торможения, процессом
Текст:
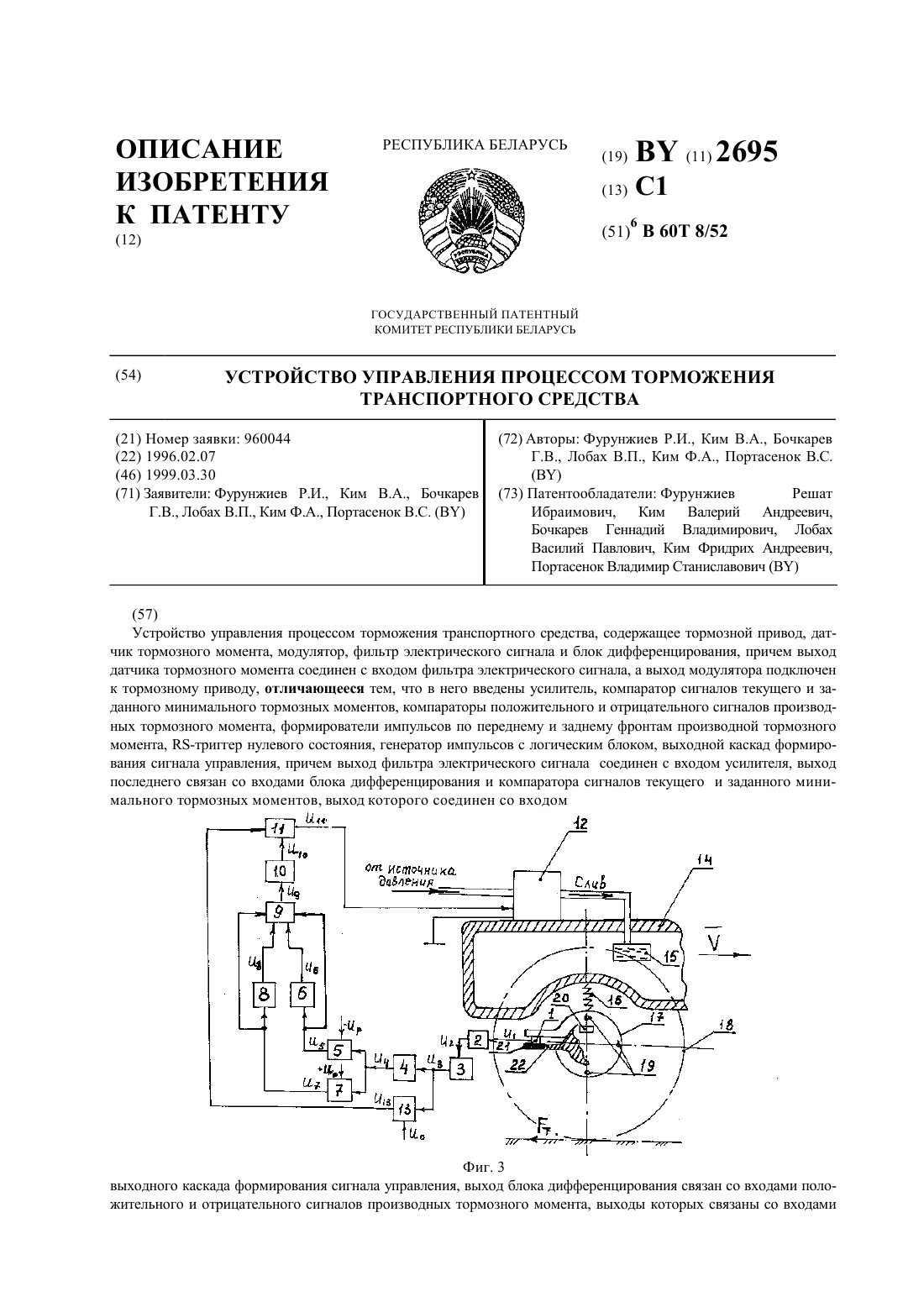
...электрического сигнала 2, усилитель сигнала 3, блок дифференцирования 4, компаратор сигналов, соответствующих текущему и заданному минимальному тормозным моментам, компараторы положительного и отрицательного сигналов производных момента 5 и 7, формирователи импульсов по переднему и заднему фронтам производной тормозного момента 6 и 8, -триггер нулевого состояния 9, генератор импульсов с логическим блоком 10, выходной каскад формирования...
Устройство управления коробкой передач транспортного средства
Номер патента: 1726
Опубликовано: 30.09.1997
Авторы: Евстратовский Александр Владимирович, Захарик Андрей Михайлович, Торгонский Анатолий Романович
МПК: B60K 20/02
Метки: коробкой, управления, транспортного, устройство, средства, передач
Текст:
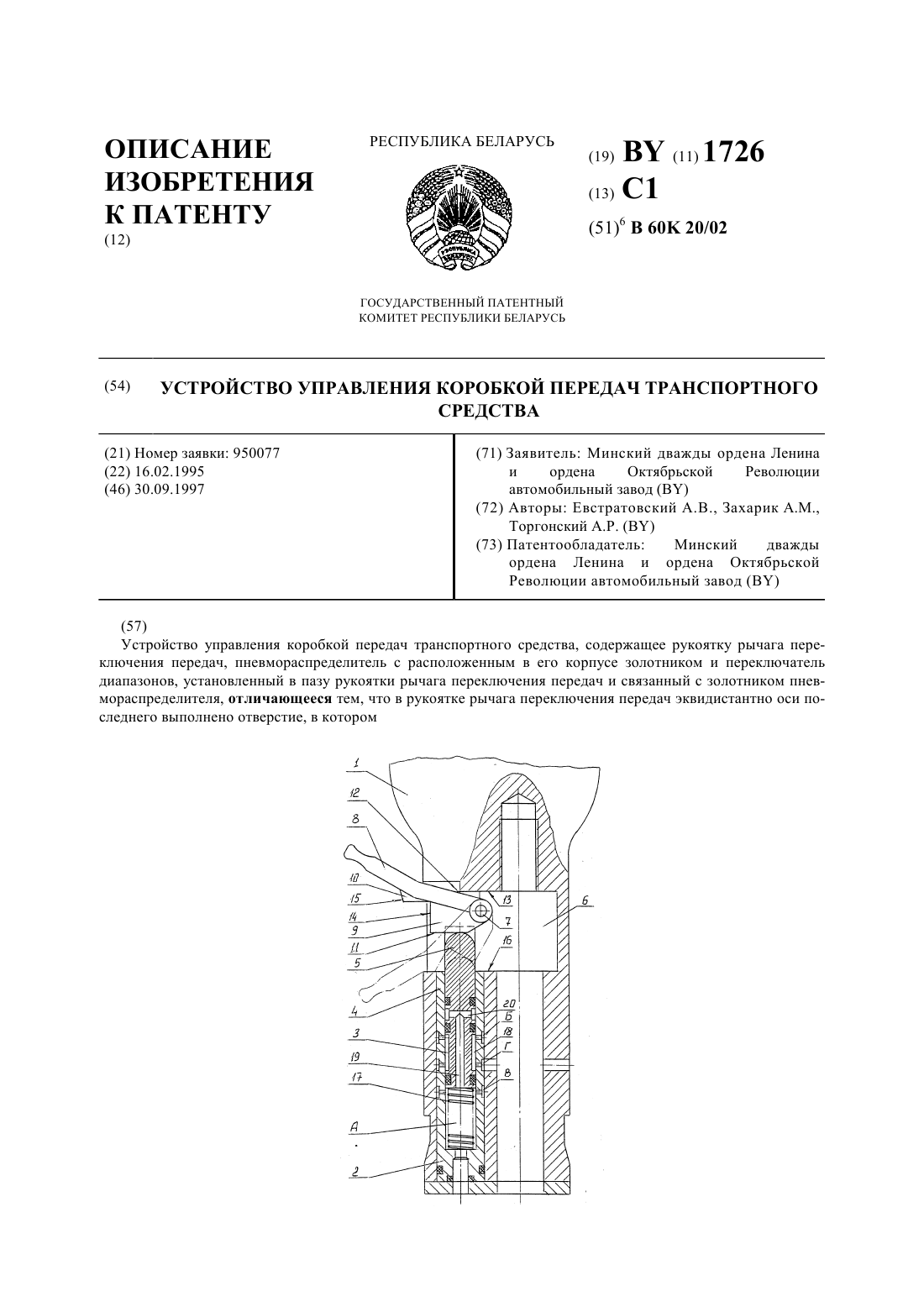
...соответственно с золотником пневмораспределителя и поверхностью паза рукоятки, причем золотник пневмораспределителя подпружинен в сторону переключателя диапазонов. На чертеже представлено устройство управления коробкой передач (контурными линиями показано верхнее положение переключателя диапазонов, штрихпунктирными - нижнее положение). Устройство управления коробкой передач транспортного средства содержит рукоятку 1 рычага переключения...
Предыдущий патент: Машина погрузочная
Следующий патент: Культиватор
Случайный патент: Зажим для проведения эластических обтураторов в наружные кишечные свищи