Устройство для автоматического управления электроприводом автономного транспортного средства
Текст
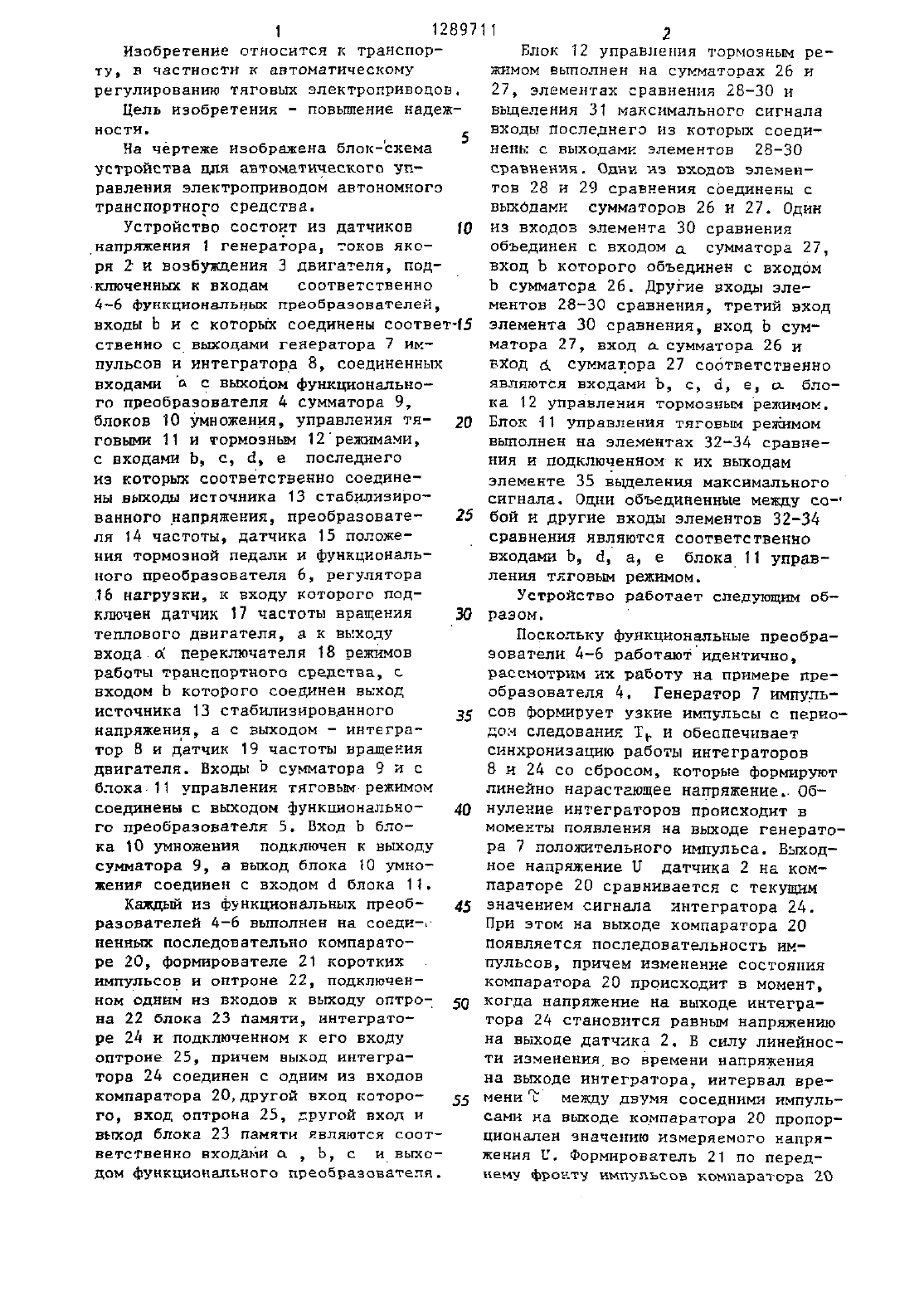
1 БЕЛАРУСЬ пдт ент Не осоюз советских социдлистшвсних РЕОПУБЛИНГОСУДАРСТВЕННЫЙ номитет СССР По ДЕЛАМ ИЗОБРЕТЕНИИ и отнвьлтиии технологический институт кранового И тягового эленгрооборудовапия(56) Приводная система СТЭЙТЕКС тяговых электродвигателей автосамосн вала 3170 грузоподъемностью 170 т фирмы Юклид, 6 ЕКг 8791 О-8. Техническое описание и инструкция пс наладке фирмы свивки, Еьвсткшс, США.(5 д) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ АВТ 0 НОМН 0 ч Г 0 ТРАНСПОРТНОГО СРЕДСТВАдежиости. Устройство состоит из датчиков 1 напряжения генератора, токов якоря 2 И возбуждения двигателя,подключенных к входам ц функциональных преобразователей 4-6, входы Ь ис которых соответственно соединены с вы ходами генератора 7 импульсов И интегратора В, блоков 11 И 12 управления тяговым и тормозным режимами, с КОТОРЫМИ СООТВЕТСТЕЕННП СВЯЭЗНЫблок 10 умножения и сумматоры 26 н 27. Регулятор 16 нагрузки и источник 13 стабилизированного напряжения через переключатель 18 режимов работы транс портного средства связаны с одним из входов интегратора 8. Датчики положения 15 тормозной педали и часто ты 19 вращения двигателя связаны с блоком 12. Устройство обеспечивает реализацию наиболее экономичных режимов рабсты электропривода. 2 з.п. флы 1 ил.Изобретение относится к транспорт ту, в частности к автоматическому регулированию тяговых электроприводов.На чертеже изображена бпокЬхема устройства для автоматического управления электроприводом автономного транспортного средства.Устройство состоит из датчиков 10напряжения 1 генератора, токов яко ря 2 и возбуждения 3 двигателя, подсоответственно 4-6 функциональных преобразователей,входы Ь и с которьй соединены соответ 45 ственно свыиодами генератора 7 импульсов и интегратора 8, соединенных входами д с выходом функционального преобразователя 4 сумматора 9,Блоков 10 умножения, управления тяговыми 11 и тормозным 12 режимами,с входами Ь, с, а, е последнего из которых соответственно соединены выходы источника 13 стабиливироч ванного напряжения, преобразователя 14 частоты, датчика 15 положения тормозной педали И функционального преобразователя 6, регулятора 16 нагрузки, к входу которого подключен датчик 17 частоты вращения теплового двигателя, а к выходу входа 01 переключателя 18 режимов работы транспортного средства, с входом Ь которого соединен выход источника 13 стабилизированного напряжения, а с выходом - интегратор В и датчик 19 частоты вращения двигателя. Входы Ь сумматора 9 И с блока-11 управления тяговм-режимом соединены с выходом функционального преобразователя 5. Вход Ь блока 10 умножения подключен к выходу сумматора 9, а выход блока 10 умноженин соединен с входом а блока 11. Каждый из функциональных преобразователей 4-6 выполнен на СОЕДН-г ненны последовательно компараторе 20, формирователе 21 коротких импульсов н оптрона 22, подключенном одним из входов х выходу оптрот на 22 блока 23 памяти, интеграторе 24 н подключенном к его входу оптроне 25, причем выход интегратора 2 д соединен с одним из входов компаратора 20,другой вход которого, вход оптрона 25. дРУгой вход и вьтод блока 23 памяти являются соответственно входами о Ь, с ивьшодом функционального преобразователя.Блок 12 управления тормозньш режимом выполнен на сумматорах 26 и 27, элементах сравнения 28-30 н выделения 31 максимального сигнала входы последнего из которых соединены с выходами элементов 28-30 сравнения. Одни из входов элементов 28 и 29 сравнения соединены с ВЫХОДЗМИ СУММЭТ 0 ров 26 и 27. Один из входов элемента 30 сравнения Объединен с входом д сумматора 27,вход Ь которого объединен с входом Ъ сумматора 26. другие входы элементов 28-30 сравнения, третий вход элемента 30 сравнения, вход Ь сумматора 27 вход о.сумматора 26 н ВХОД Щ сумматора 27 Чоответственно являются входами Ь, с, б, е, а блока 12 управления тормозным режимом. Блок 11 управления тяговым режимом выполнен на элементах 32-34 сравнения и подключенном к их выходам элементе 35 выделения максимального сигнала. Одни объединенные между сот ббй И дРУгие входы элементов 32-34 сравнения являются соответственно входами Ъ, д, а, е блока П управления тяговым режимом.Устройство работает следующим образом.Поскольку функциональные преобразователи 46 работают идентично,рассмотрим их работу на примере преобразователя 4. Генератор 7 импульсов формирует узкие импульсы с периодом следования Т, и обеспечивает синхронизацию работы интеграторов 8 и 24 со сбросом, которые формируют линейно нарастающее напряжение. Обнуленне интеграторов происходит в моменты появления на выходе генератора 7 положительного импульса. ВыходНОЕ Напрлжение П датчика 2 на компараторе 20 сравнивается с текущим значением сигнала интегратора 24. При этом на выходе компаратора 20 появляется последовательность импульсов, причем изменение состояния компаратора 20 происходит в момент,когда напряжение на выходе интегратора 24 становится равным напряжению на выходе датчика 2. В силу линейности иэмененияво времени напряжения на выходе интегратора, интервал вреМЭНИГ между двумя соседними импульсами на выходе компаратора 20 пропорционален значению измеряемого напряжения С. Формирователь 21 по передНЕМЧ ФРОНТ импульсов компаратора 20формирует узкие импульсы, которые передаются через оптрон 22 и управляют включением блока 23 памяти, в который записывается значение Напряжения,имеющееся на выходе интегратора 8 5 в этот момент.-преобразователь С является преобразователем входного напряжения датчика 2 с использованием оптронных раз 1 О вязок, как по сигналучсинхронизацин работы интеграторов 24 и 8 оптроном 25 так и по сигналу передачи информации через оптрон 22, при этом оптроны 22 и 25 работают в импульсномсрежиме.Устройство в тяговом режиме работает следующим образом.Переключатель 18 подключает выход регулятора 16-нагрузки к аналоговому 20 входу интегратора 8. Регулятор 16 нагрузки преобразует период частоты вращения теплового двигателя в напряжение ПСигнал напряжения, пропорционапьный периоду частоты Ед алгебраически суммируется с постоянным иапряжением которое-корректирует зависимость мощности злектроцвигателя Р от частоты ЕдДВеличина текущего значения вынодного напряжения интегратора 8 пропорциональна величине входного напряжения Сы При этом сигнал навыходе блока 23-памяти пропорционален величине напряжеиияЕРи входному напря- 35 жению датчика Тогда напряжения на выходах функциональных преобразователей 4 и 5 равны, Т 5. Е. ОЧИ д ТЬЬ ) где К К - коэффициенты пропор циональности 45 ток электродвигателя напряжение генератора.Поступая в сумматор 9, эти напряжения суммируются. При этом на выноде блока 10 умножения напряжение рав-50 НОСИГНЗЛЫ Пней 3 П 5 П пасту-пают не входы элементов 32-Зд сравнения. При этом на их выходах формиРУЕТСЯ Сигнал разности с постоянным Напряжением Е, поступающим от источника 13. Считая, что коэффициент усиления элементов 32-34 достаточно велик, и если параметр, задающий усТЗВКУ К /ЕтдБ заменить на некоторую ФУНКЦИЮ К,/3 (д 3 Ь 3 полученную в ре-. зультате коррекции в регуляторе 16 нагрузки, то предельная и частичные внешние характеристики генератора остаются лодобньми, а изменяются только расстояния между характеристиками, соответствующими разным значениям ЕгдддМаксимальный из выходных сигналов элементов 32-34 сравнения выделяется элементом 35 выбора максимального сигнала. АВ тормозном режиме переключатель 18 подключает аналоговьй вход интегратора 8 н источнику 13 стабилизироВЕЕННОГО напряжения. На ВЫХОДЗХ ФУНК цнональных преобразователей 4-6 формируются сигналы, пропорциональные значениям входных сигналов датчи ков.21,3 - 1 В 1я г ь Сигнал Пг с выхода датчика 15 по ступает на входы сумматоров 26 и 27, где он суммируется с сигналами, пропорциональными величинам токов 1,(на предельной характеристике значение Пс О). Суммарные сигналы поступают на входы элементов 28И 29 сравнения, где они сравниваются с постоянным напряжением Е источнис тяговьм режимом формируются следующие условия регулирования в тормозном режименбнид К о ,к долевые коэффициенты соответствующих слагаемых приматорах 26 и 27. Преобразователь 14 частоты осушествляет.обратно пропорциональное преобразование частоты вращения ЭЛЭКТРОДВИГЭТВЛЯ В напряжение П Ка/Едь где К 9 коэффициент передачи преобраэователя 14. НапряжеНиПд поступает на один из входов элемента 30 сравнения, на другой вход которого поступает сиг ВОМУ, 5пал Пмд К 19. При этом регулированне будет осуществляться в соот ветствии с уравнением К тМаксиальны сигнал рассогласования, по которому ведется регулирование в тормозном режиме, снимается с выхода элемента 31 выделения максимального сигнала.Таким образом, в тормозном режиме формируются трехзонные характеристики с ограничениями предельных значений токов возббуждеаия 1 ди якоря 1 а также реактивной ЭДС электродвигателя, причем последнее ограничение реализовано путем стабилизации произведения дмювеиным образом При практической реализации устройства сигналы обратных связей подаются на входы элементов сравнения через регулируемые делители напряжения, с помощью которых осуществляЕТСЯ раздельная независимая регулировка указанным ограничений применительно к предельным параметрам лприменяемого силового электрооборуЩования. Это относится как к тяготак и к тормозному ренимам.Предлагаемое устройство обеспечивает автоматическое регулирование электропривода в тлговом и тормозном режимах, с реализацией наиболее экономичных характеристик, возможностью их коррекции в тяговом режиме и повышением эффективности торможения в области высоких частот вращения электродвигателя. Применение оптронным развязок повышает надежность устройства, а использование преобразователей период-напряжение вместо частота-напряжение упрощает структуру функциональных преобразователей.Устройство для автоматического управления электроприводом автономного транспортного средства, содержащее датчик частоты вращения двигателя,подключенный к входу регулятора нагрузки, датчики напряжения генератора, токов якоря И возбуждения двигателя, подключенные к первым входам соответственно первого, второго И третьего функциональных преобразователей, выходы которьшсоответственнссоединены с первым И вторм входами блока управления тяговьм режимом и первм входом блока управления тормозным режимом, второй, третий И четвертый входы которого соответственно соединены с выходами датчика положе ния тормозной педали, второго функционального преобразователя.н преобразователя частоты, к входу которого подключен датчик частоты вращения двигателя, и блок умножения, один из вхоцов которого-соединен с выходом второго функционального преобразователя,а вышод т с третьим входом блока управления тяговым режимом, о т л и ча ю щ е е с я тем, что, с целью. повышения надежности, оно снабжено подключенными к вторым и третьим входам функциональных преобразователей-генераторам импульсов н интегратором, подключенным к выходам иервого И второго функциональных преобразователей, первым сумматором, источником стабилизированного напрнже,нив И подключенным к его выходу одним из входов переключателем режимов работы транспортного средства, с другим входом которого соединен выход регу лятора нагрузки, а с выходом - один из входов интегратора,другой вход которого подключен к выходу генератора имульсов, причем выход первого сумматора соединен с другим входом блока умножения, а выход стабилизированного нсточника напряжения - о пятым и четвертым входамисоответственно блоков управления тормозны тяговыми режимами.2. Устройство по п.1 о т л и ч а ю щ е е с в тем, что функциональный преобразователь выполнен на соединенных.последовательно компараторе, формирователе коротких импуль сов И первом оптрона, подключенном одним из входов к выходу первого оптрона блока памяти, втором интеграторе и подключенном к его входу втором оптроне, причем выход второго интегратора соединен с одним из вхоДОВ К 0 МПЗРгТ 0 Ра другой вход которого, вход второго оптрона, другой вход и выход блока памяти являются соответственно первым, вторым и третьим входами и выходом функционального преобразователя.3. Устройство по п.1 о т л и ч а Ю Щ е е с Я тем, что блок управпения тормозным режимом выполнен на
МПК / Метки
МПК: B60L 11/04
Метки: автоматического, средства, устройство, транспортного, автономного, электроприводом, управления
Код ссылки
<a href="https://by.patents.su/5-59-ustrojjstvo-dlya-avtomaticheskogo-upravleniya-elektroprivodom-avtonomnogo-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Устройство для автоматического управления электроприводом автономного транспортного средства</a>
Система автоматического управления
Номер патента: 27
Опубликовано: 30.05.1994
Автор: Дашкевич Валерий Викторович
МПК: G05B 19/00
Метки: управления, автоматического, система
Текст:
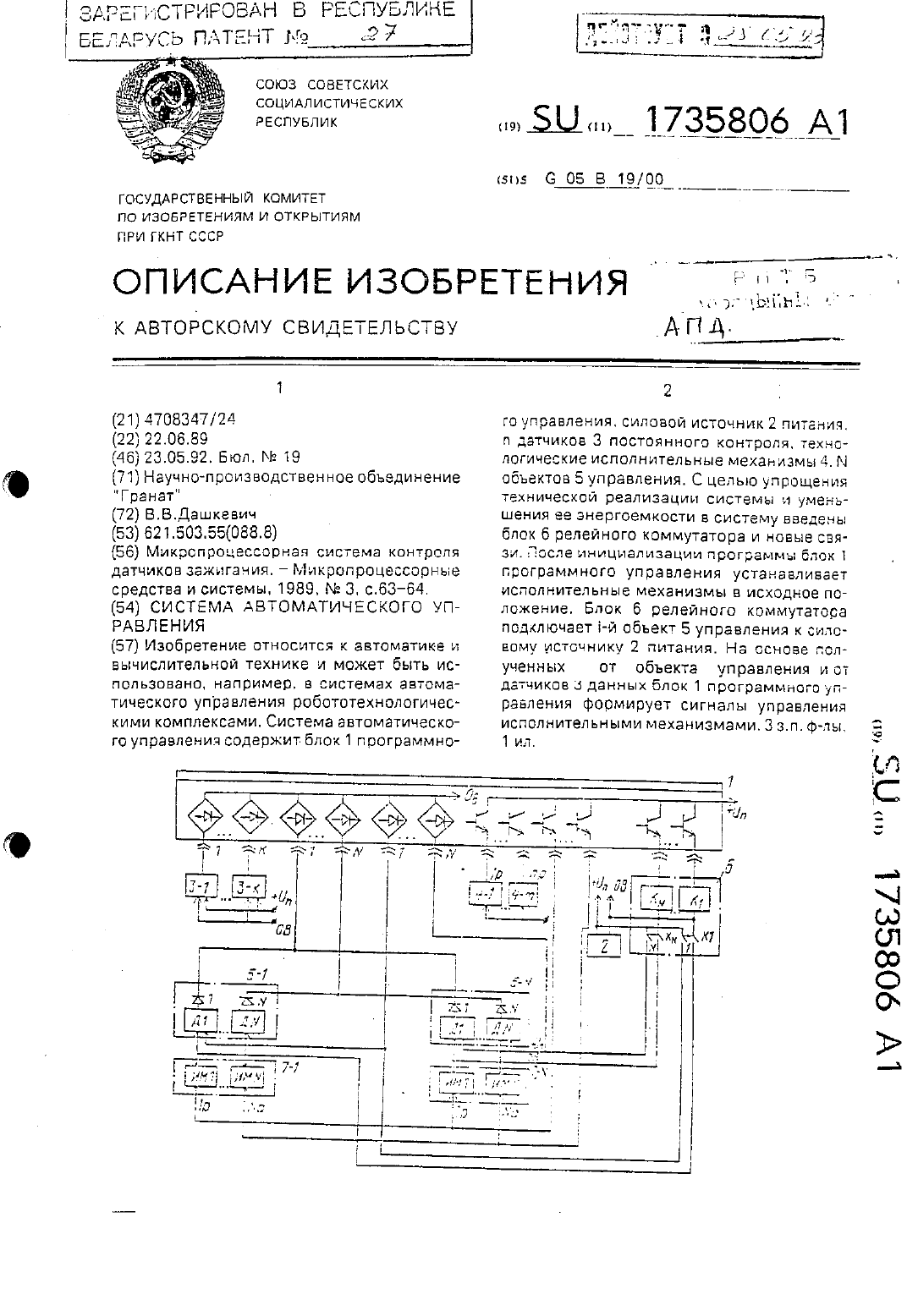
...программного управления. силовой источник 2 питания. датчики 3 постоянного контроля. технологические исПОЛНИТВЛЬНЫЕ МЭХЭНИЗМЫ 4, М групп датчиков 5 состояния. блок 6 релейной коммутации. М групп исполнительных механизмов 7.Блок 1 программного управления предНазначен для цихлового управления технологическим оборудованием. В качестве блока 1 программного управления. например, могут быть использованы системы управления промышленным роботом или...
Обтекатель транспортного средства
Номер патента: 39
Опубликовано: 30.05.1994
Автор: Усов Владлен Иванович
МПК: B62D 35/00
Метки: обтекатель, средства, транспортного
Текст:
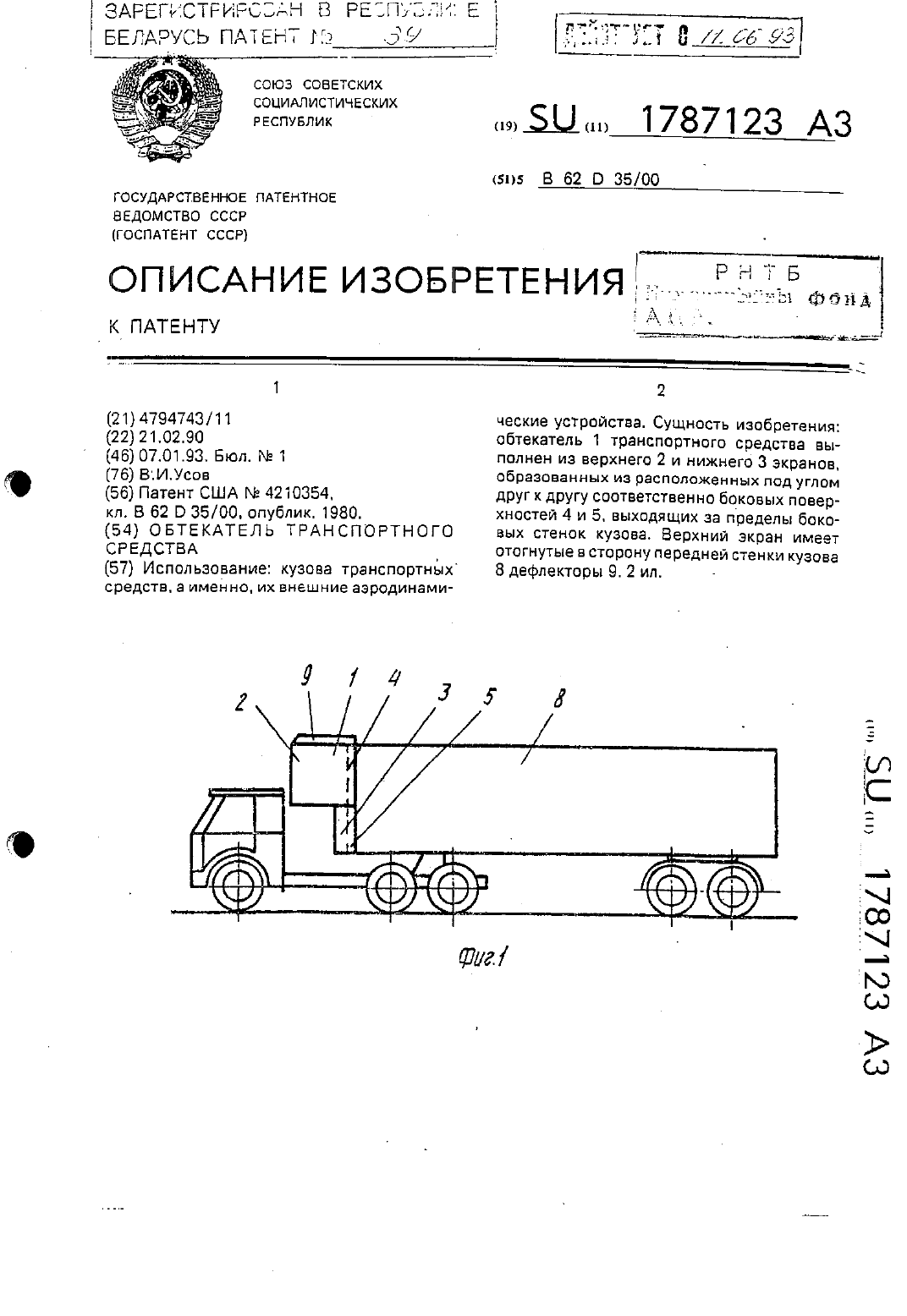
...дополнительно снабжен верхними дефлекторами. при этом боковые стенки экранов и верхние дефлекторы установлены с перекрытием боковых и верхней кромок передней стенки кузова.На фиг. 1 показан общий вид транспортного средства с обтекателем. вид сбоку на фиг. 2 то же. вплд сверху.Обтекатель 1 транспортного средства Выполнен ИЗ двух частей верхнего 2 и ниж 10него 3 экранов. а каждая часть образована двумя боковыми поверхностями 4 и 5....
Цифровая следящая система управления
Номер патента: 29
Опубликовано: 30.05.1994
Авторы: Филиппович Валерий Николаевич, Дашкевич В. В.
МПК: G05B 15/02
Метки: система, управления, цифровая, следящая
Текст:
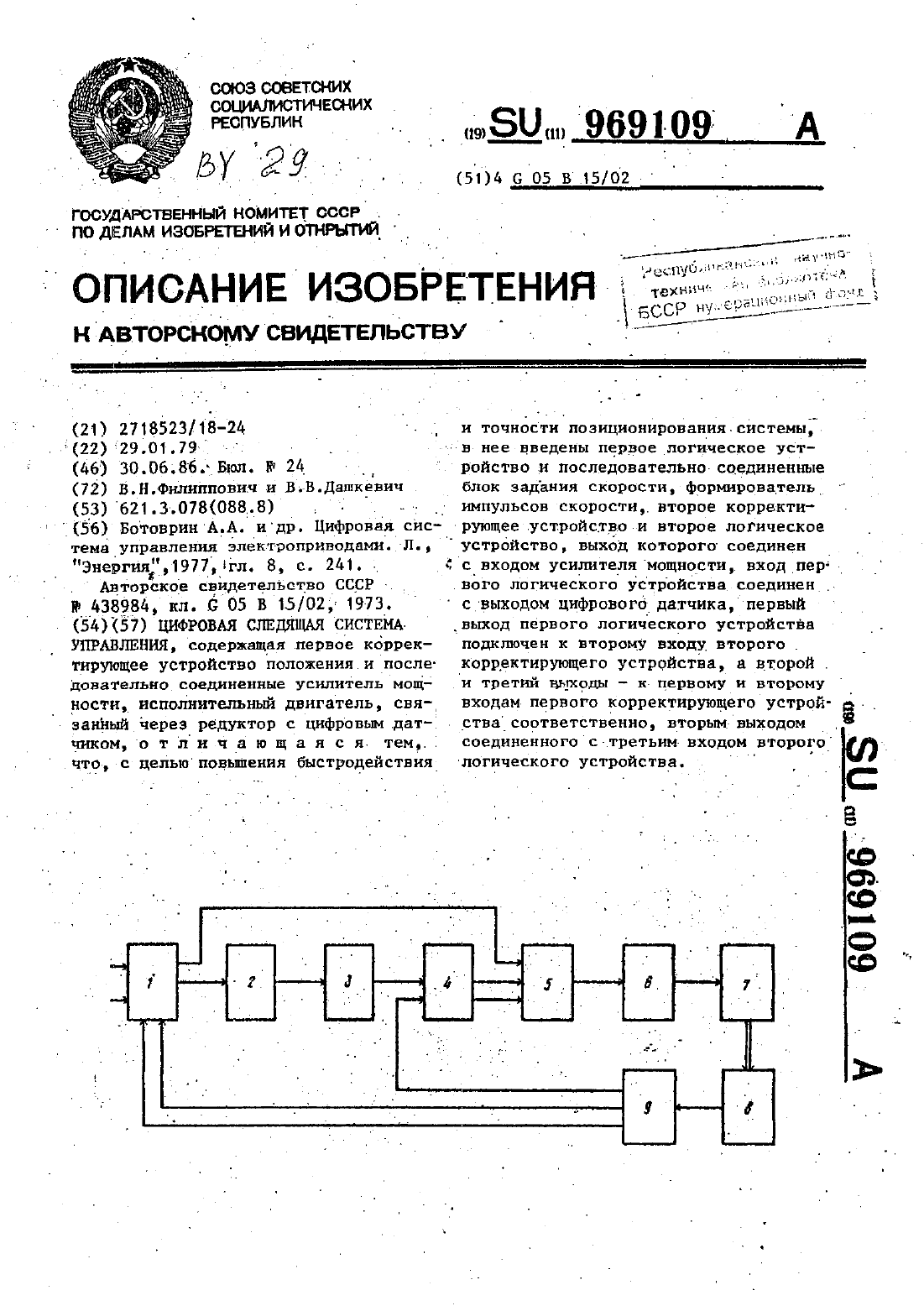
...0 Устройства,И Третий выходы к первому и второму входам первого корректирующего УСТРФЙСТВН соответственно, втдрм-выходом соединенного с третьим входом,второго логического устройства.Такое решение позволит повысить 5 ЫСТрОдЕйствие-и точность позиционирования системы.На чертеже-изображена блоксхема предлагаемой цифровой следящей систет мы управления.Система состоит из последовательно соединенньш первого корректируюЩегоустройства 1,...
Устройство измерения параметров перемещения
Номер патента: 28
Опубликовано: 30.05.1994
Авторы: Филиппович Валерий Николаевич, Дашкевич В. В.
МПК: G01P 3/489
Метки: перемещения, параметров, измерения, устройство
Текст:
...по ошюму из выходов.Дсдтифратор 5 предназначен для работы в тм реэкнм и реалиэаитти одной и слеЭлемент 8 задержки предназначен для храпения предъшушето состояния децдафратора 5,раслрепелитеш 9 и 12 для работы в шем реиотме и реализуют одну из следующих 41 фрикштн, первый хшъ-хд. х К - Хг-ЧКС атчпкое 2 ста-катаются сист-таль прямоуголь т срормьъ, спвииутьте по фазе. Сигналы усиливаются в усилителе 2 и поступают затем че рез соорштрователъ З...
Устройство для измерения скорости ультразвука

Номер патента: 1679
Опубликовано: 30.03.1988
Автор: Чернобай Иван Александрович
МПК: G01H 5/00
Метки: ультразвука, скорости, устройство, измерения
Текст:
...по.входу Старт с выиог стс опережала на один импульс вы-о да стартового генератора 1 а сбрасы о ходное кодовое состояние второго.т ваетсл в исходное-состояние только счтчика 1 б с поступлением следУю- во конце формирования п-шпульсов ь щег 9 имптльса с опорного кварцевого 7 ддпакете автоциркуляциоиньпс сигналов генератора 15 да счетный вход второ- цэто позволяет запомнить время прихо-Е..Г 0 СЧЕТЧДКЗ-16 выходные 9 дЫП 0 сЛед да пеового...
Предыдущий патент: Машина Голубева В. И. с качающимся рабочим органом
Следующий патент: Устройство для автоматического управления электроприводом автономного транспортного средства
Случайный патент: Футляр для компакт-дисков