Робастный автопилот канала тангажа летательного аппарата
Номер патента: 18251
Опубликовано: 30.06.2014
Авторы: Пальцев Александр Николаевич, Гриднев Юрий Васильевич, Цанава Андрей Александрович, Малкин Виталий Александрович
Текст
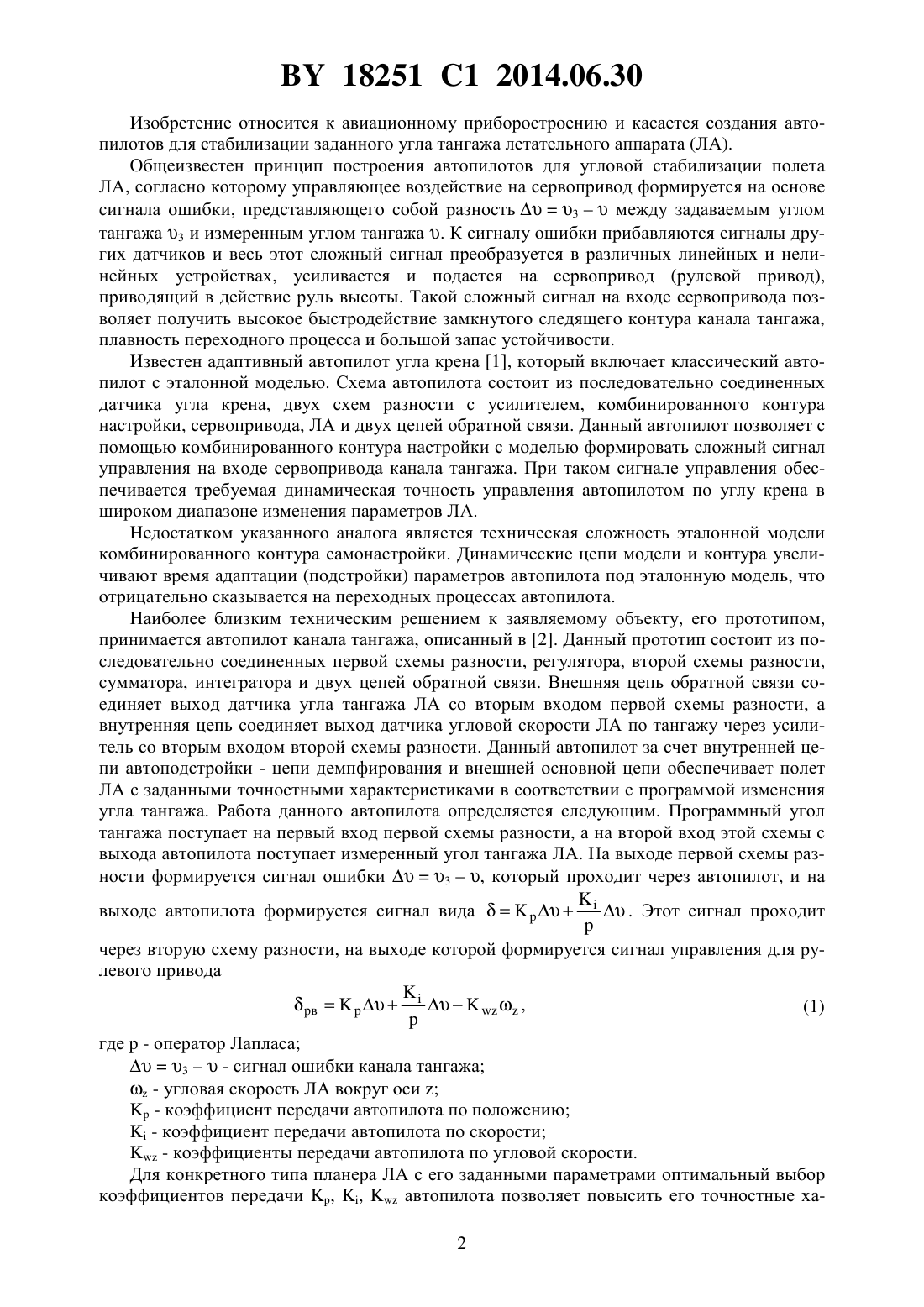
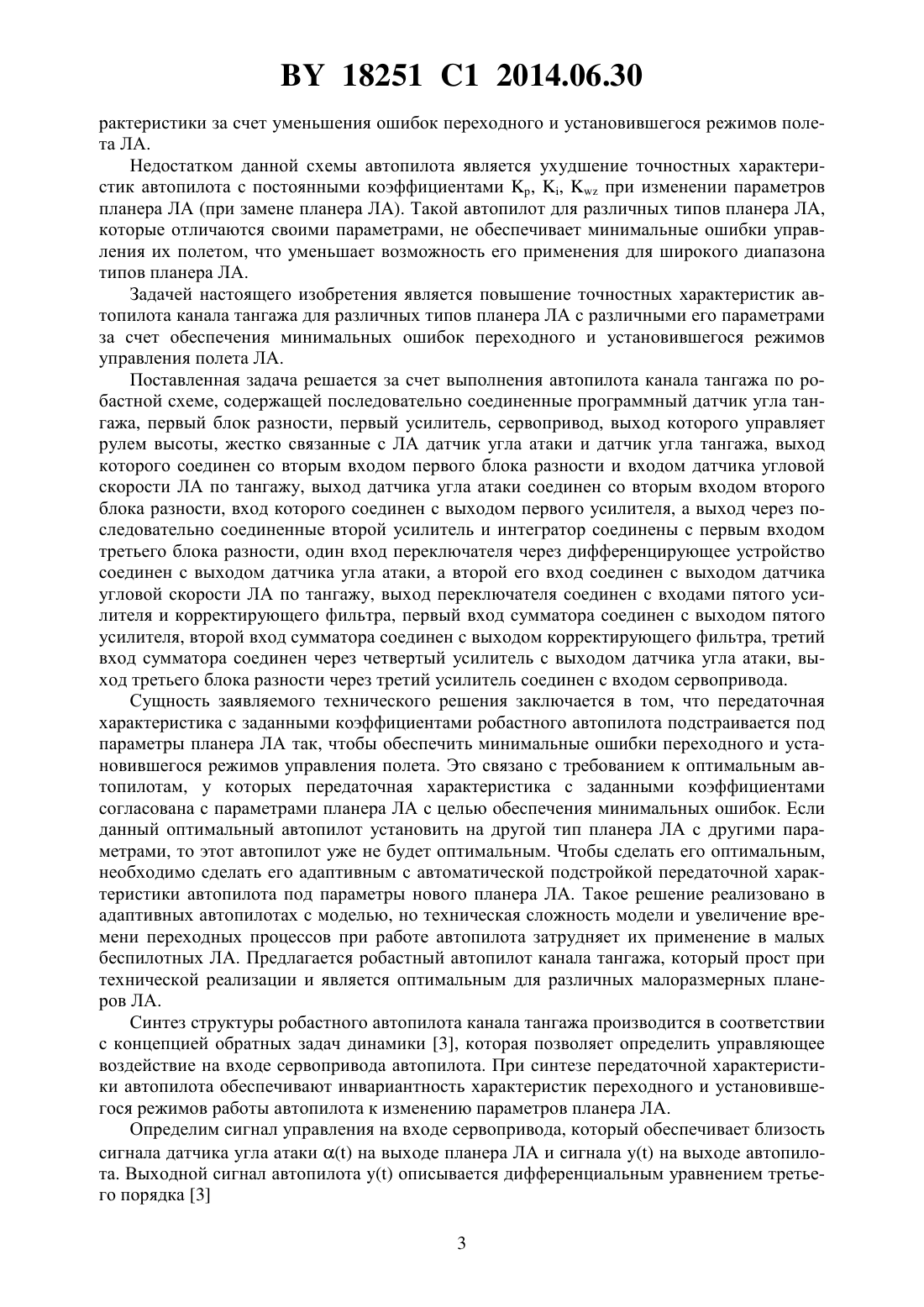
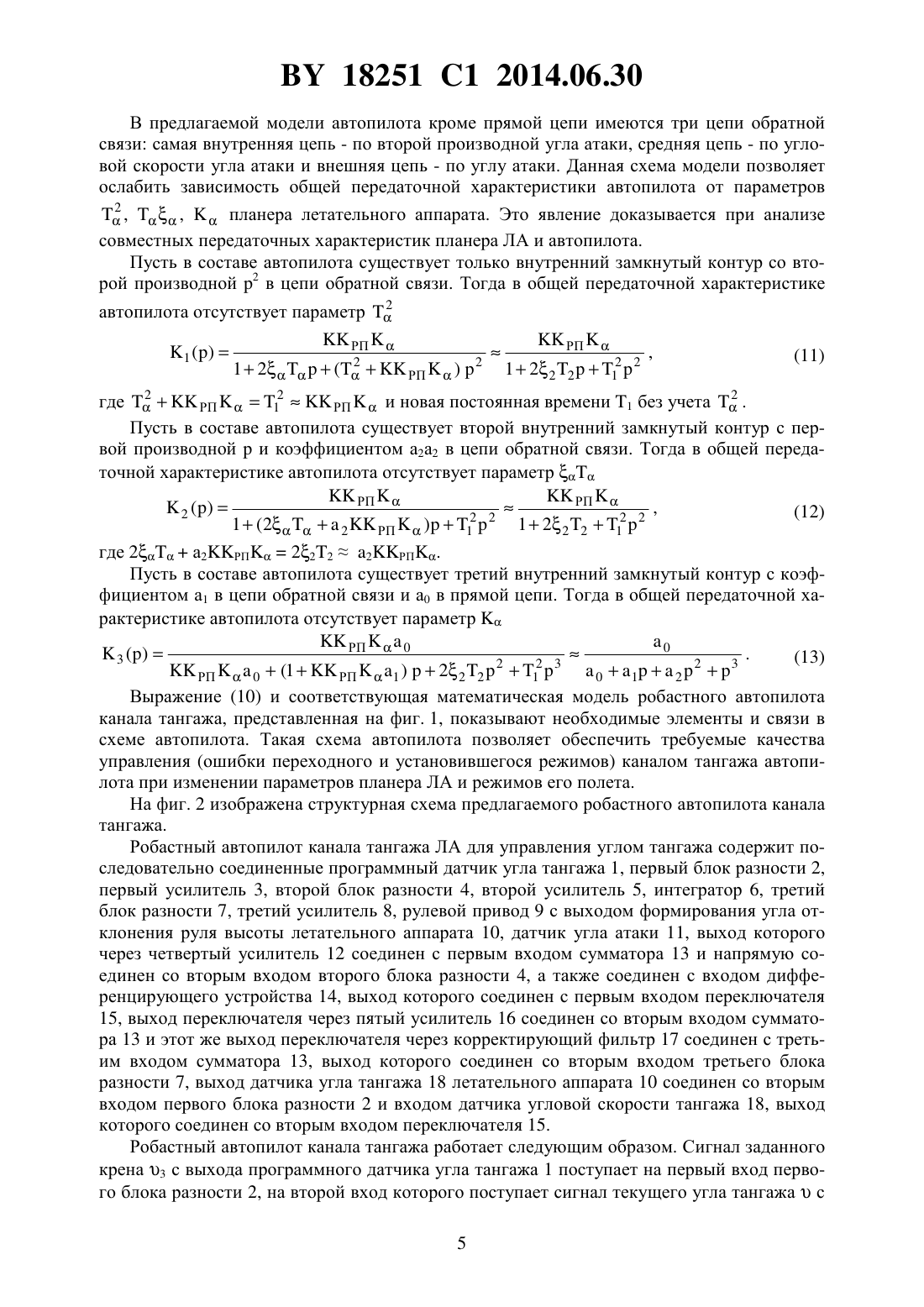
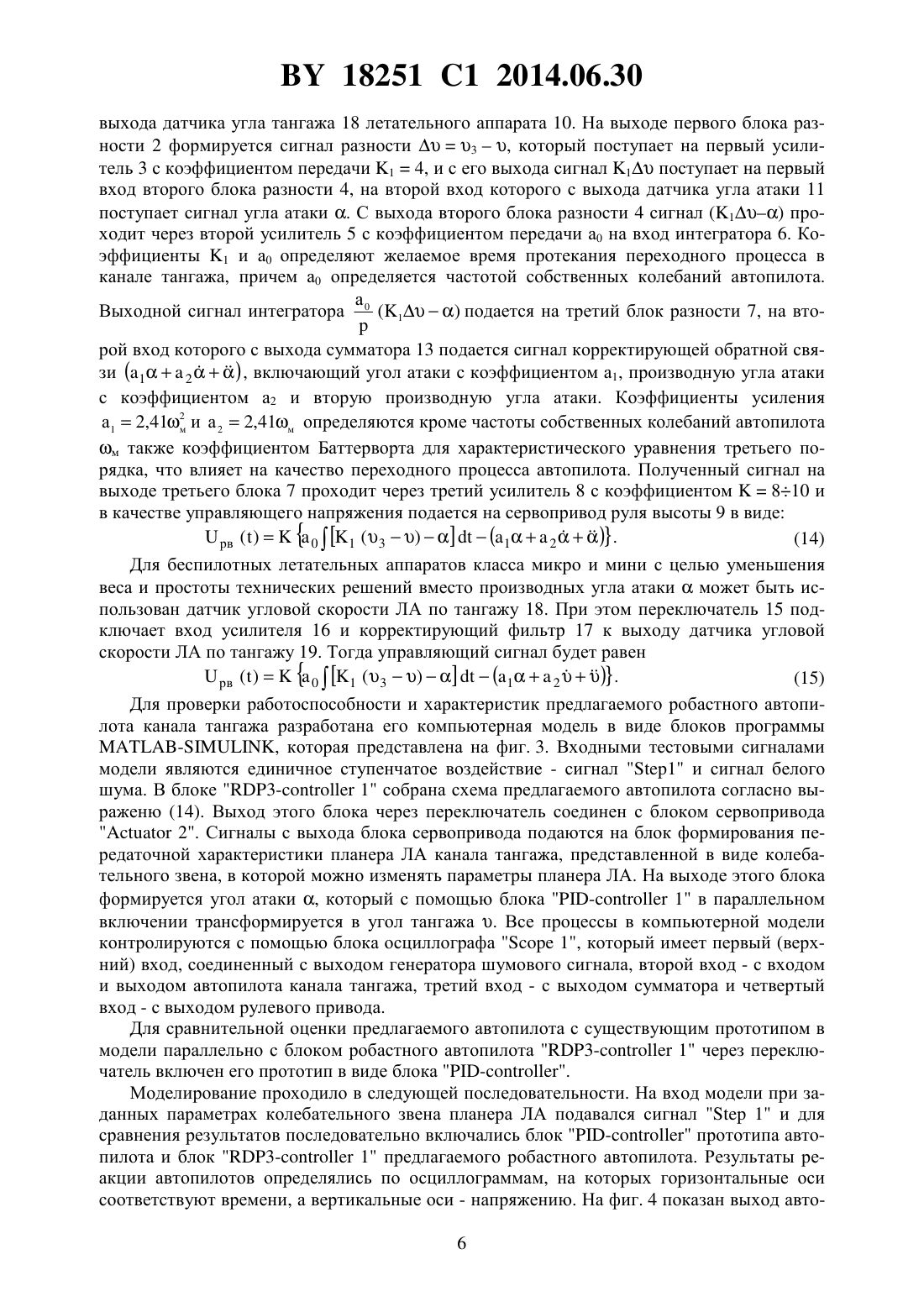
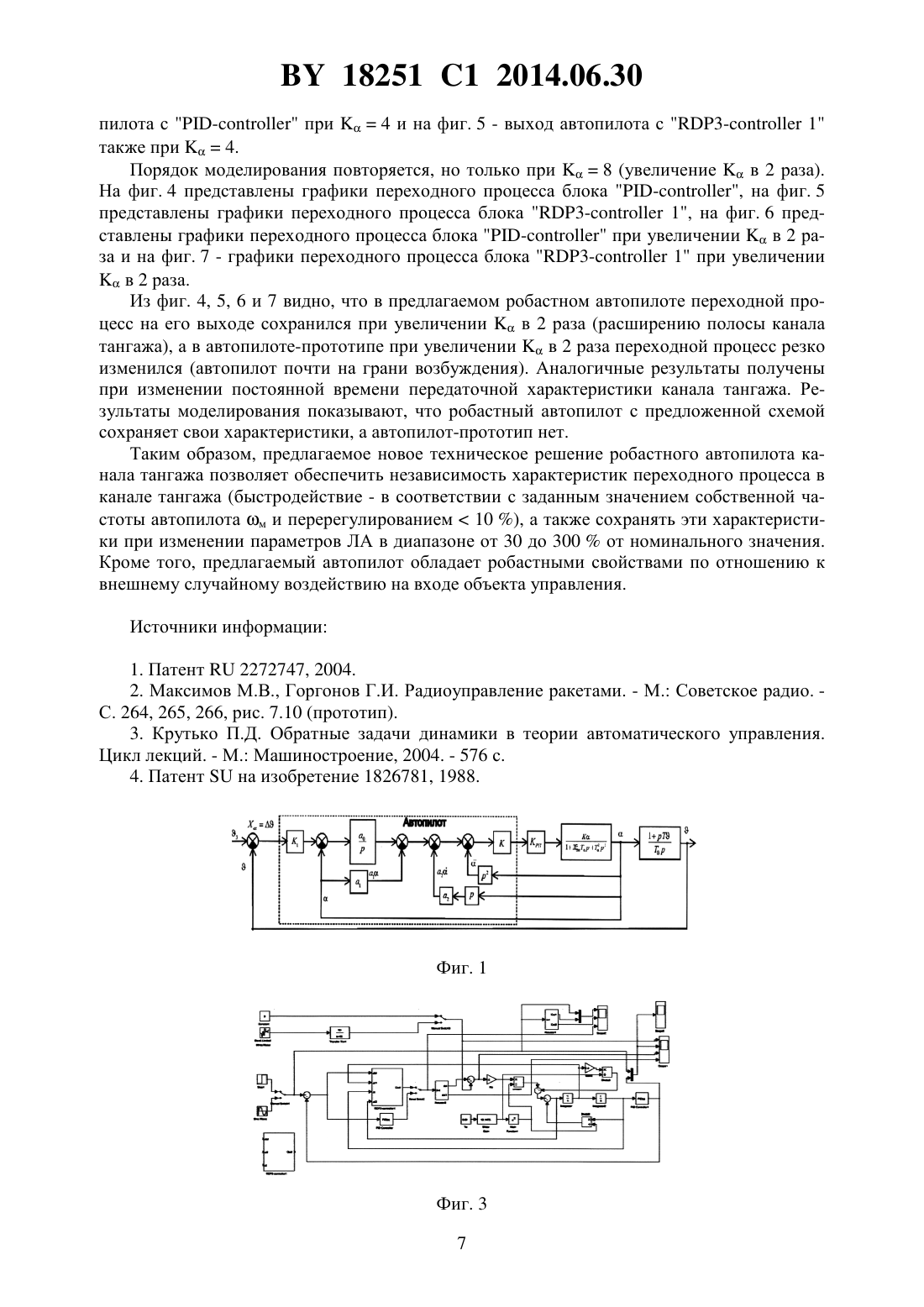
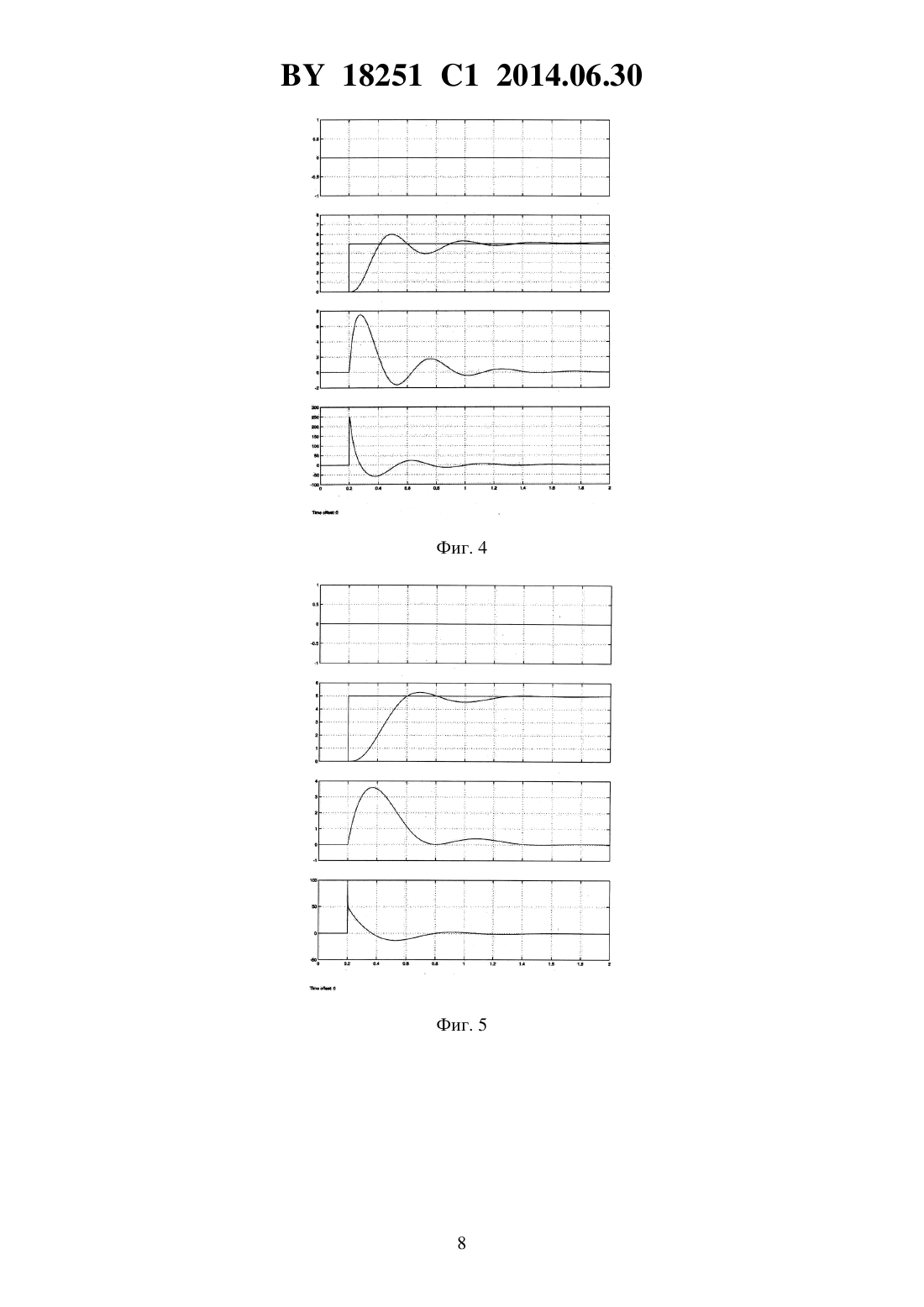
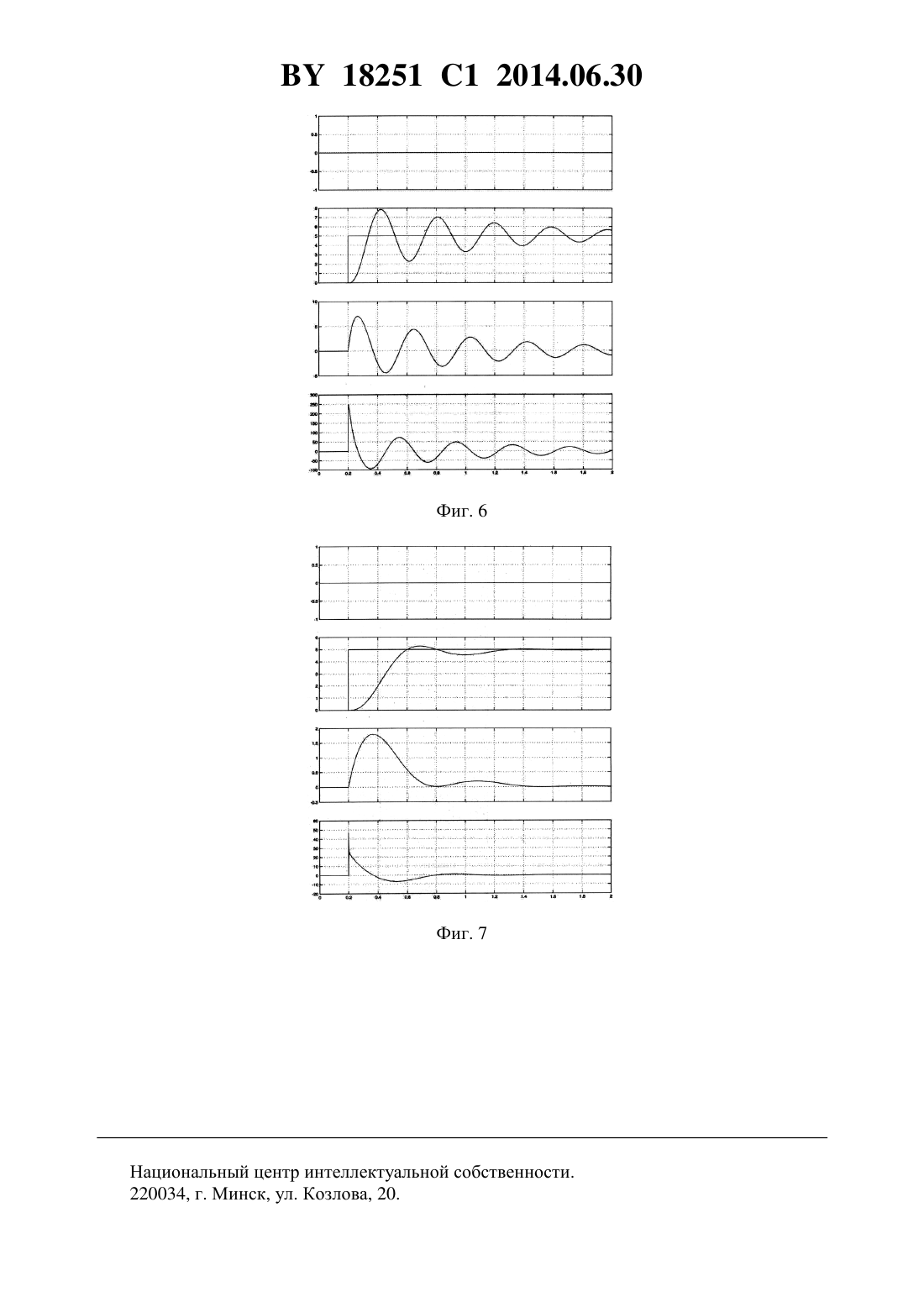
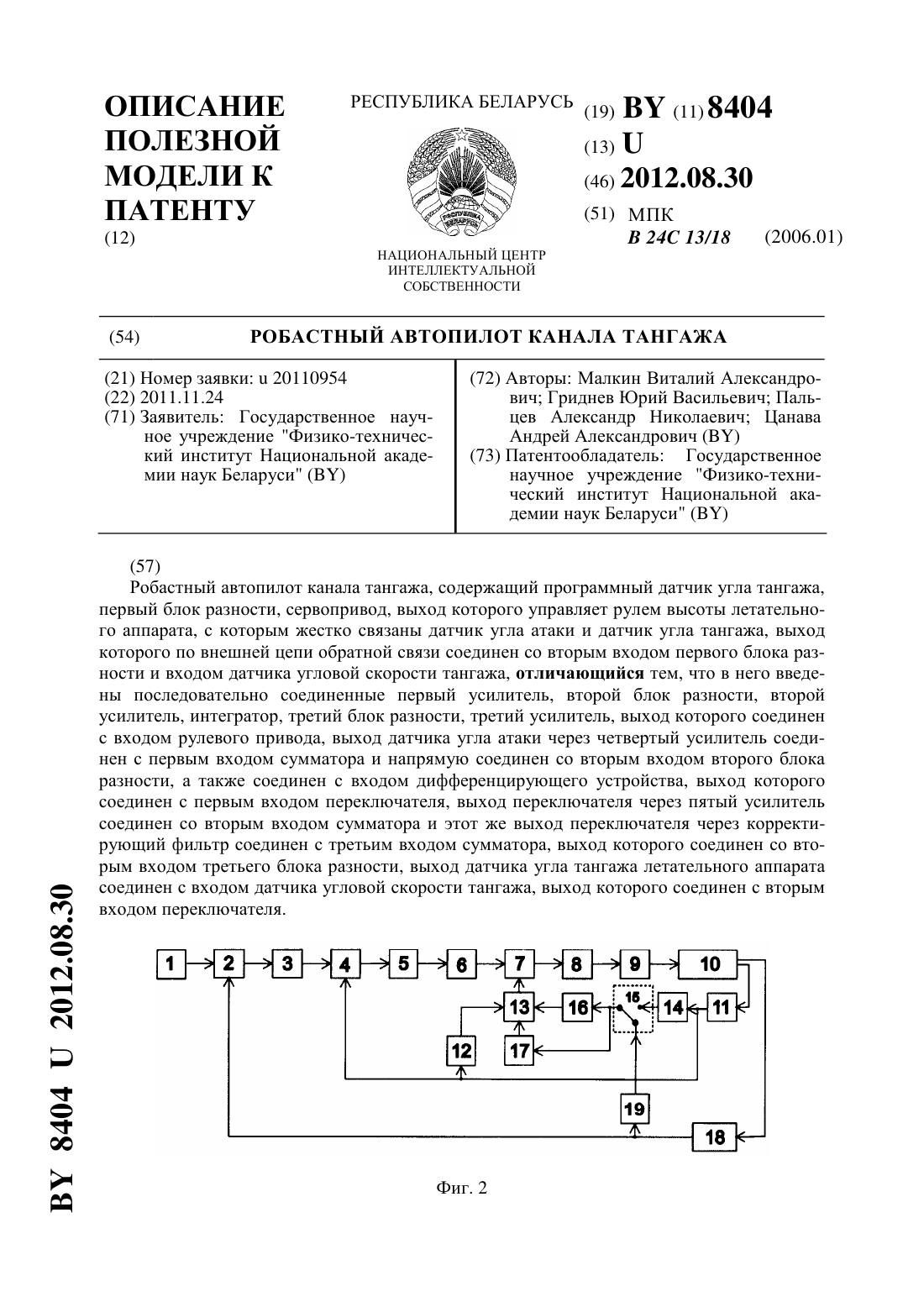
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ РОБАСТНЫЙ АВТОПИЛОТ КАНАЛА ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА(71) Заявитель Государственное научное учреждение Физико-технический институт Национальной академии наук Беларуси(72) Авторы Малкин Виталий Александрович Гриднев Юрий Васильевич Пальцев Александр Николаевич Цанава Андрей Александрович(73) Патентообладатель Государственное научное учреждение Физико-технический институт Национальной академии наук Беларуси(57) Робастный автопилот канала тангажа летательного аппарата, содержащий последовательно соединенные программный датчик угла тангажа, первый блок разности, первый усилитель, второй блок разности, второй усилитель, интегратор, третий блок разности,третий усилитель и сервопривод руля высоты летательного аппарата датчик угла атаки,выполненный с возможностью жесткой связи с летательным аппаратом, датчик угла тангажа и датчик угловой скорости тангажа, причем выход датчика угла тангажа по внешней цепи обратной связи соединен со входом датчика угловой скорости тангажа и вторым входом первого блока разности, выход третьего усилителя соединен со входом сервопривода руля высоты летательного аппарата, выход датчика угла атаки соединен со вторым входом второго блока разности, со входом дифференцирующего устройства, выход которого соединен с первым входом переключателя, и через четвертый усилитель - с первым входом сумматора, выход переключателя через пятый усилитель соединен со вторым входом сумматора и через корректирующий фильтр - с третьим входом сумматора, выход которого соединен со вторым входом третьего блока разности, а выход датчика угловой скорости тангажа соединен со вторым входом переключателя. 18251 1 2014.06.30 Изобретение относится к авиационному приборостроению и касается создания автопилотов для стабилизации заданного угла тангажа летательного аппарата (ЛА). Общеизвестен принцип построения автопилотов для угловой стабилизации полета ЛА, согласно которому управляющее воздействие на сервопривод формируется на основе сигнала ошибки, представляющего собой разность 3 между задаваемым углом тангажа 3 и измеренным углом тангажа . К сигналу ошибки прибавляются сигналы других датчиков и весь этот сложный сигнал преобразуется в различных линейных и нелинейных устройствах, усиливается и подается на сервопривод (рулевой привод),приводящий в действие руль высоты. Такой сложный сигнал на входе сервопривода позволяет получить высокое быстродействие замкнутого следящего контура канала тангажа,плавность переходного процесса и большой запас устойчивости. Известен адаптивный автопилот угла крена 1, который включает классический автопилот с эталонной моделью. Схема автопилота состоит из последовательно соединенных датчика угла крена, двух схем разности с усилителем, комбинированного контура настройки, сервопривода, ЛА и двух цепей обратной связи. Данный автопилот позволяет с помощью комбинированного контура настройки с моделью формировать сложный сигнал управления на входе сервопривода канала тангажа. При таком сигнале управления обеспечивается требуемая динамическая точность управления автопилотом по углу крена в широком диапазоне изменения параметров ЛА. Недостатком указанного аналога является техническая сложность эталонной модели комбинированного контура самонастройки. Динамические цепи модели и контура увеличивают время адаптации (подстройки) параметров автопилота под эталонную модель, что отрицательно сказывается на переходных процессах автопилота. Наиболее близким техническим решением к заявляемому объекту, его прототипом,принимается автопилот канала тангажа, описанный в 2. Данный прототип состоит из последовательно соединенных первой схемы разности, регулятора, второй схемы разности,сумматора, интегратора и двух цепей обратной связи. Внешняя цепь обратной связи соединяет выход датчика угла тангажа ЛА со вторым входом первой схемы разности, а внутренняя цепь соединяет выход датчика угловой скорости ЛА по тангажу через усилитель со вторым входом второй схемы разности. Данный автопилот за счет внутренней цепи автоподстройки - цепи демпфирования и внешней основной цепи обеспечивает полет ЛА с заданными точностными характеристиками в соответствии с программой изменения угла тангажа. Работа данного автопилота определяется следующим. Программный угол тангажа поступает на первый вход первой схемы разности, а на второй вход этой схемы с выхода автопилота поступает измеренный угол тангажа ЛА. На выходе первой схемы разности формируется сигнал ошибки 3, который проходит через автопилот, и на выходе автопилота формируется сигнал вида. Этот сигнал проходит через вторую схему разности, на выходе которой формируется сигнал управления для рулевого привода где- оператор Лапласа 3- сигнал ошибки канала тангажа- угловая скорость ЛА вокруг оси- коэффициент передачи автопилота по положению- коэффициент передачи автопилота по скорости- коэффициенты передачи автопилота поугловой скорости. Для конкретного типа планера ЛА с его заданными параметрами оптимальный выбор коэффициентов передачи , ,автопилота позволяет повысить его точностные ха 2 18251 1 2014.06.30 рактеристики за счет уменьшения ошибок переходного и установившегося режимов полета ЛА. Недостатком данной схемы автопилота является ухудшение точностных характеристик автопилота с постоянными коэффициентами , ,при изменении параметров планера ЛА (при замене планера ЛА). Такой автопилот для различных типов планера ЛА,которые отличаются своими параметрами, не обеспечивает минимальные ошибки управления их полетом, что уменьшает возможность его применения для широкого диапазона типов планера ЛА. Задачей настоящего изобретения является повышение точностных характеристик автопилота канала тангажа для различных типов планера ЛА с различными его параметрами за счет обеспечения минимальных ошибок переходного и установившегося режимов управления полета ЛА. Поставленная задача решается за счет выполнения автопилота канала тангажа по робастной схеме, содержащей последовательно соединенные программный датчик угла тангажа, первый блок разности, первый усилитель, сервопривод, выход которого управляет рулем высоты, жестко связанные с ЛА датчик угла атаки и датчик угла тангажа, выход которого соединен со вторым входом первого блока разности и входом датчика угловой скорости ЛА по тангажу, выход датчика угла атаки соединен со вторым входом второго блока разности, вход которого соединен с выходом первого усилителя, а выход через последовательно соединенные второй усилитель и интегратор соединены с первым входом третьего блока разности, один вход переключателя через дифференцирующее устройство соединен с выходом датчика угла атаки, а второй его вход соединен с выходом датчика угловой скорости ЛА по тангажу, выход переключателя соединен с входами пятого усилителя и корректирующего фильтра, первый вход сумматора соединен с выходом пятого усилителя, второй вход сумматора соединен с выходом корректирующего фильтра, третий вход сумматора соединен через четвертый усилитель с выходом датчика угла атаки, выход третьего блока разности через третий усилитель соединен с входом сервопривода. Сущность заявляемого технического решения заключается в том, что передаточная характеристика с заданными коэффициентами робастного автопилота подстраивается под параметры планера ЛА так, чтобы обеспечить минимальные ошибки переходного и установившегося режимов управления полета. Это связано с требованием к оптимальным автопилотам, у которых передаточная характеристика с заданными коэффициентами согласована с параметрами планера ЛА с целью обеспечения минимальных ошибок. Если данный оптимальный автопилот установить на другой тип планера ЛА с другими параметрами, то этот автопилот уже не будет оптимальным. Чтобы сделать его оптимальным,необходимо сделать его адаптивным с автоматической подстройкой передаточной характеристики автопилота под параметры нового планера ЛА. Такое решение реализовано в адаптивных автопилотах с моделью, но техническая сложность модели и увеличение времени переходных процессов при работе автопилота затрудняет их применение в малых беспилотных ЛА. Предлагается робастный автопилот канала тангажа, который прост при технической реализации и является оптимальным для различных малоразмерных планеров ЛА. Синтез структуры робастного автопилота канала тангажа производится в соответствии с концепцией обратных задач динамики 3, которая позволяет определить управляющее воздействие на входе сервопривода автопилота. При синтезе передаточной характеристики автопилота обеспечивают инвариантность характеристик переходного и установившегося режимов работы автопилота к изменению параметров планера ЛА. Определим сигнал управления на входе сервопривода, который обеспечивает близость сигнала датчика угла атакина выходе планера ЛА и сигналана выходе автопилота. Выходной сигнал автопилотаописывается дифференциальным уравнением третьего порядка 3 3(2) где а 0, а 1, а 2, а 3 - коэффициенты уравнения, ,- третья, вторая и первая производные времени сигнала на выходе автопилотавх - сигнал на входе автопилота. Коэффициенты а 0, а 1, а 2 выбираются исходя из требуемых характеристик переходного процесса. В качестве автопилота канала тангажа выбрано звено 3 порядка. Условием близости двух фазовых траекторий автопилотаи планера ЛА , при заданной между ними ошибке , является, согласно обратной задаче динамики, условие минимума функционала 2. Тогда в соответствии с этой теорией дифференциальный сигнал управления на входе сервопривода определяется видом 3,(3) где- коэффициент пропорциональности. После интегрирования соотношения (3) получаем сигнал управления на входе сервопривода.(4) Из уравнения (2) при а 31 находим третью производную фазовой траектории автопилотаа 0 вха 0 а 1 а 2.(5) Тогда с учетом выполнения условия близости переходного процесса автопилота и планера ЛА можно записать приблизительное равенство между фазовыми траекториями автопилота и планера ЛА,,,(6) что позволяет уравнение (5) записать в виде(7) После интегрирования уравнения (7) при нулевых начальных условиях получим вторую производную(8) и запишем сигнал управления на входе сервоприводаа 0(вх)а 1 а 2. Для обеспечения требуемой добротности по скорости в прямую цепь необходимо ввести коэффициент усиления 1. Тогда формула (9) принимает вида 0(1 вх)а 1 а 2. Согласно полученному уравнению (10), математическая модель предлагаемого робастного автопилота показана на фиг. 1. Данная модель состоит из последовательно соединенных первой схемы разности канала тангажа, автопилота, который включает последовательно соединенные усилитель с коэффициентом 1, вторую и третью схемы разности, между которыми параллельно включены интегратор с коэффициентом а 0 и усилитель с коэффициентом а 1, четвертую схему разности, пятую схему разности, выходной усилитель автопилота с коэффициентом , выход которого последовательно соединен с сервоприводом с коэффициентом РП, с планером ЛА, имеющим передаточную характе ристику канала тангажаи передаточную характеристику 2 1221( ) преобразования угла атакив угол тангажа .( ) 4 18251 1 2014.06.30 В предлагаемой модели автопилота кроме прямой цепи имеются три цепи обратной связи самая внутренняя цепь - по второй производной угла атаки, средняя цепь - по угловой скорости угла атаки и внешняя цепь - по углу атаки. Данная схема модели позволяет ослабить зависимость общей передаточной характеристики автопилота от параметров 2,,планера летательного аппарата. Это явление доказывается при анализе совместных передаточных характеристик планера ЛА и автопилота. Пусть в составе автопилота существует только внутренний замкнутый контур со второй производной 2 в цепи обратной связи. Тогда в общей передаточной характеристике 2 автопилота отсутствует параметр 1 ( ) 2 2 гдеРП 12 РПи новая постоянная времени 1 без учета. Пусть в составе автопилота существует второй внутренний замкнутый контур с первой производнойи коэффициентом а 2 а 2 в цепи обратной связи. Тогда в общей передаточной характеристике автопилота отсутствует параметрРПРП(12) 1(22 РП)122 12 2 2122 где 2 а 2 РП 2222 РП. Пусть в составе автопилота существует третий внутренний замкнутый контур с коэффициентом а 1 в цепи обратной связи и а 0 в прямой цепи. Тогда в общей передаточной характеристике автопилота отсутствует параметрРП 0 03(13) 2 2 3 РП 0(1 РП 1 )2 2 2101223 Выражение (10) и соответствующая математическая модель робастного автопилота канала тангажа, представленная на фиг. 1, показывают необходимые элементы и связи в схеме автопилота. Такая схема автопилота позволяет обеспечить требуемые качества управления (ошибки переходного и установившегося режимов) каналом тангажа автопилота при изменении параметров планера ЛА и режимов его полета. На фиг. 2 изображена структурная схема предлагаемого робастного автопилота канала тангажа. Робастный автопилот канала тангажа ЛА для управления углом тангажа содержит последовательно соединенные программный датчик угла тангажа 1, первый блок разности 2,первый усилитель 3, второй блок разности 4, второй усилитель 5, интегратор 6, третий блок разности 7, третий усилитель 8, рулевой привод 9 с выходом формирования угла отклонения руля высоты летательного аппарата 10, датчик угла атаки 11, выход которого через четвертый усилитель 12 соединен с первым входом сумматора 13 и напрямую соединен со вторым входом второго блока разности 4, а также соединен с входом дифференцирующего устройства 14, выход которого соединен с первым входом переключателя 15, выход переключателя через пятый усилитель 16 соединен со вторым входом сумматора 13 и этот же выход переключателя через корректирующий фильтр 17 соединен с третьим входом сумматора 13, выход которого соединен со вторым входом третьего блока разности 7, выход датчика угла тангажа 18 летательного аппарата 10 соединен со вторым входом первого блока разности 2 и входом датчика угловой скорости тангажа 18, выход которого соединен со вторым входом переключателя 15. Робастный автопилот канала тангажа работает следующим образом. Сигнал заданного крена 3 с выхода программного датчика угла тангажа 1 поступает на первый вход первого блока разности 2, на второй вход которого поступает сигнал текущего угла тангажас 18251 1 2014.06.30 выхода датчика угла тангажа 18 летательного аппарата 10. На выходе первого блока разности 2 формируется сигнал разности 3, который поступает на первый усилитель 3 с коэффициентом передачи 14, и с его выхода сигнал 1 поступает на первый вход второго блока разности 4, на второй вход которого с выхода датчика угла атаки 11 поступает сигнал угла атаки . С выхода второго блока разности 4 сигнал (1) проходит через второй усилитель 5 с коэффициентом передачи а 0 на вход интегратора 6. Коэффициенты 1 и а 0 определяют желаемое время протекания переходного процесса в канале тангажа, причем а 0 определяется частотой собственных колебаний автопилота. а Выходной сигнал интегратора 0 (1) подается на третий блок разности 7, на вто рой вход которого с выхода сумматора 13 подается сигнал корректирующей обратной связи ( 12) , включающий угол атаки с коэффициентом а 1, производную угла атаки с коэффициентом а 2 и вторую производную угла атаки. Коэффициенты усиления 2 а 12,41 м и а 22,41 м определяются кроме частоты собственных колебаний автопилота м также коэффициентом Баттерворта для характеристического уравнения третьего порядка, что влияет на качество переходного процесса автопилота. Полученный сигнал на выходе третьего блока 7 проходит через третий усилитель 8 с коэффициентом 810 и в качестве управляющего напряжения подается на сервопривод руля высоты 9 в видерв 01 (3)(12) .(14) Для беспилотных летательных аппаратов класса микро и мини с целью уменьшения веса и простоты технических решений вместо производных угла атакиможет быть использован датчик угловой скорости ЛА по тангажу 18. При этом переключатель 15 подключает вход усилителя 16 и корректирующий фильтр 17 к выходу датчика угловой скорости ЛА по тангажу 19. Тогда управляющий сигнал будет равенрв 01 (3)( 12) .(15) Для проверки работоспособности и характеристик предлагаемого робастного автопилота канала тангажа разработана его компьютерная модель в виде блоков программы-, которая представлена на фиг. 3. Входными тестовыми сигналами модели являются единичное ступенчатое воздействие - сигнал 1 и сигнал белого шума. В блоке 3- 1 собрана схема предлагаемого автопилота согласно выраженю (14). Выход этого блока через переключатель соединен с блоком сервопривода 2. Сигналы с выхода блока сервопривода подаются на блок формирования передаточной характеристики планера ЛА канала тангажа, представленной в виде колебательного звена, в которой можно изменять параметры планера ЛА. На выходе этого блока формируется угол атаки , который с помощью блока - 1 в параллельном включении трансформируется в угол тангажа . Все процессы в компьютерной модели контролируются с помощью блока осциллографа 1, который имеет первый (верхний) вход, соединенный с выходом генератора шумового сигнала, второй вход - с входом и выходом автопилота канала тангажа, третий вход - с выходом сумматора и четвертый вход - с выходом рулевого привода. Для сравнительной оценки предлагаемого автопилота с существующим прототипом в модели параллельно с блоком робастного автопилота 3- 1 через переключатель включен его прототип в виде блока -. Моделирование проходило в следующей последовательности. На вход модели при заданных параметрах колебательного звена планера ЛА подавался сигнал 1 и для сравнения результатов последовательно включались блок - прототипа автопилота и блок 3- 1 предлагаемого робастного автопилота. Результаты реакции автопилотов определялись по осциллограммам, на которых горизонтальные оси соответствуют времени, а вертикальные оси - напряжению. На фиг. 4 показан выход авто 18251 1 2014.06.30 пилота с - при 4 и на фиг. 5 - выход автопилота с 3- 1 также при 4. Порядок моделирования повторяется, но только при 8 (увеличениев 2 раза). На фиг. 4 представлены графики переходного процесса блока -, на фиг. 5 представлены графики переходного процесса блока 3- 1, на фиг. 6 представлены графики переходного процесса блока - при увеличениив 2 раза и на фиг. 7 - графики переходного процесса блока 3- 1 при увеличениив 2 раза. Из фиг. 4, 5, 6 и 7 видно, что в предлагаемом робастном автопилоте переходной процесс на его выходе сохранился при увеличениив 2 раза (расширению полосы канала тангажа), а в автопилоте-прототипе при увеличениив 2 раза переходной процесс резко изменился (автопилот почти на грани возбуждения). Аналогичные результаты получены при изменении постоянной времени передаточной характеристики канала тангажа. Результаты моделирования показывают, что робастный автопилот с предложенной схемой сохраняет свои характеристики, а автопилот-прототип нет. Таким образом, предлагаемое новое техническое решение робастного автопилота канала тангажа позволяет обеспечить независимость характеристик переходного процесса в канале тангажа (быстродействие - в соответствии с заданным значением собственной частоты автопилота м и перерегулированием 10 ), а также сохранять эти характеристики при изменении параметров ЛА в диапазоне от 30 до 300 от номинального значения. Кроме того, предлагаемый автопилот обладает робастными свойствами по отношению к внешнему случайному воздействию на входе объекта управления. Источники информации 1. Патент 2272747, 2004. 2. Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М. Советское радио. С. 264, 265, 266, рис. 7.10 (прототип). 3. Крутько П.Д. Обратные задачи динамики в теории автоматического управления. Цикл лекций. - М. Машиностроение, 2004. - 576 с. 4. Патентна изобретение 1826781, 1988. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 9
МПК / Метки
МПК: B64C 13/18, G05D 1/08
Метки: канала, робастный, тангажа, аппарата, автопилот, летательного
Код ссылки
<a href="https://by.patents.su/9-18251-robastnyjj-avtopilot-kanala-tangazha-letatelnogo-apparata.html" rel="bookmark" title="База патентов Беларуси">Робастный автопилот канала тангажа летательного аппарата</a>
Робастный автопилот канала тангажа
Номер патента: U 8404
Опубликовано: 30.08.2012
Авторы: Цанава Андрей Александрович, Пальцев Александр Николаевич, Гриднев Юрий Васильевич, Малкин Виталий Александрович
МПК: B24C 13/18
Метки: автопилот, канала, тангажа, робастный
Текст:
...выбрано звено 3 порядка для канала тангажа. Условием близости двух траекторий автопилотаи планера ЛАпри заданной между ними ошибке ( )( )является, согласно обратной задаче динамики, условие минимумафункционала . Тогда в соответствии с этой теорией дифференциальный сигнал управления на входе сервопривода определяется видом 3,(3) где- коэффициент пропорциональности. После интегрирования соотношения (3) получаем сигнал управления на...
Робастный автопилот канала крена
Номер патента: U 9229
Опубликовано: 30.06.2013
Авторы: Яцына Юрий Францевич, Малкин Виталий Александрович, Пальцев Александр Николаевич, Гриднев Юрий Васильевич
МПК: B64C 13/18
Метки: робастный, крена, канала, автопилот
Текст:
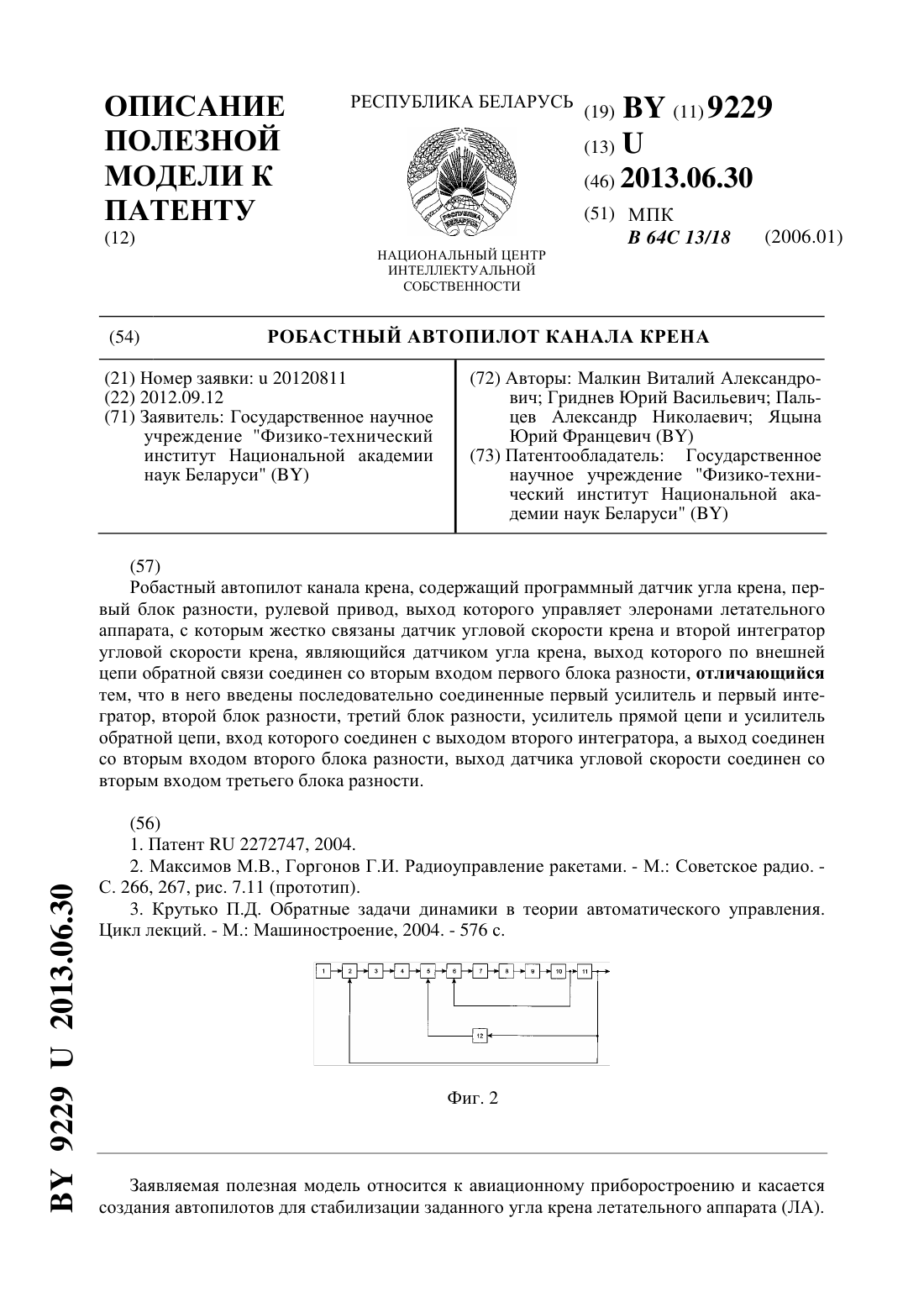
...динамики 3, которая позволяет определить закон управляющего сигнала на входе сервопривода автопилота. При синтезе передаточной характеристики робастного автопилота обеспечивают инвариантность характеристик переходного и установившегося режимов работы автопилота к изменению параметров планера ЛА. Известно, что передаточная функция БЛА (беспилотного летательного аппарата) по каналу крена имеет астатизм первого порядка, следовательно,...
Устройство измерения радиальной скорости маловысотного летательного аппарата
Номер патента: U 4563
Опубликовано: 30.08.2008
Авторы: Воинов Валерий Васильевич, Мокринский Владимир Валерьевич
МПК: G01R 29/12
Метки: маловысотного, устройство, радиальной, измерения, скорости, аппарата, летательного
Текст:
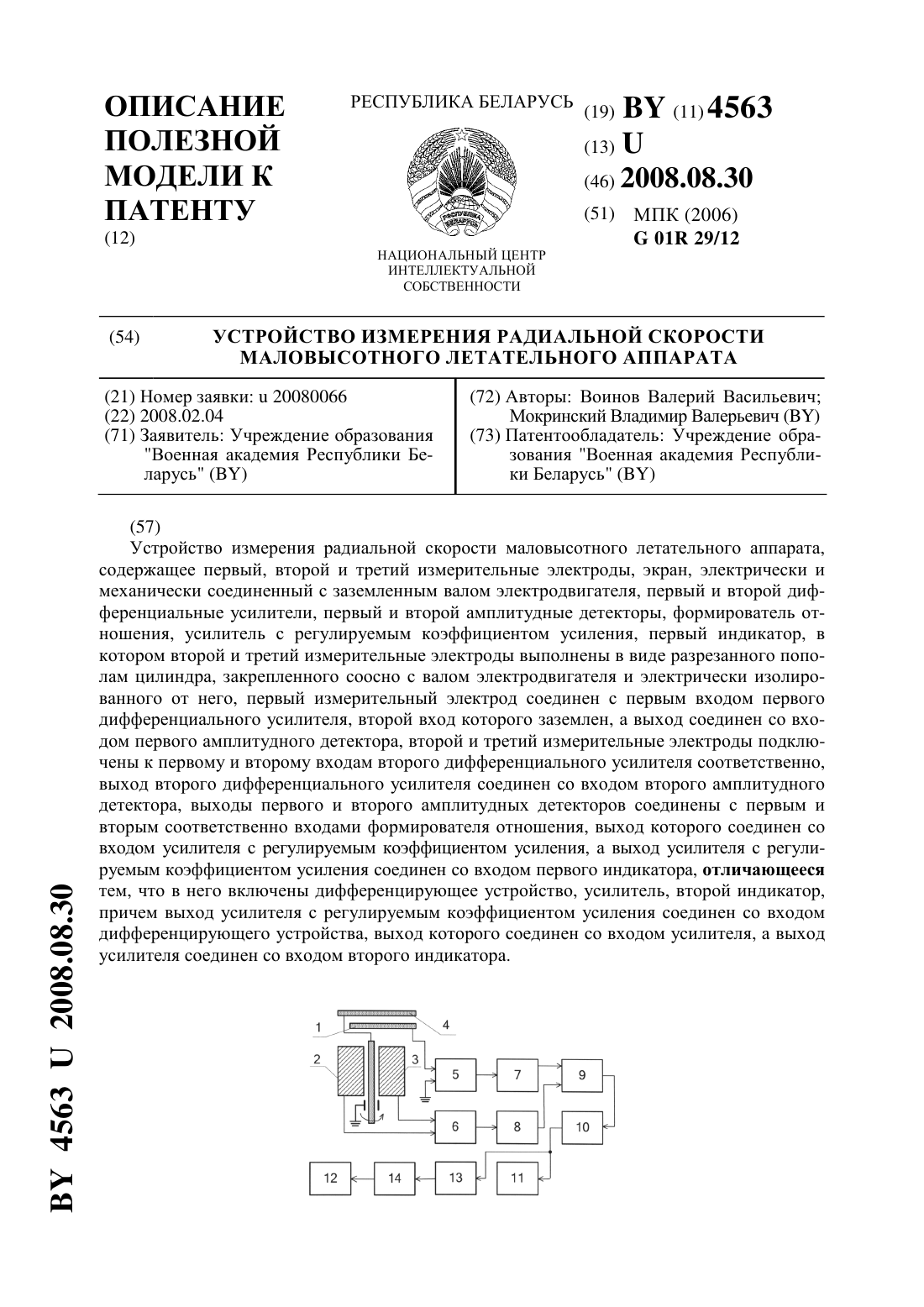
...детектора, второй и третий измерительный электроды подключены к первому и второму входам второго дифференциального усилителя соответственно, выход второго дифференциального усилителя соединен со входом второго амплитудного детектора, выходы первого и второго амплитудных детекторов соединены с первым и вторым соответственно входами формирователя отношения, выход которого соединен со входом усилителя с регулируемым коэффициентом усиления, а...
Устройство измерения полярных координат маловысотного летательного аппарата

Номер патента: U 4564
Опубликовано: 30.08.2008
Авторы: Воинов Валерий Васильевич, Мокринский Владимир Валерьевич
МПК: G01R 29/12
Метки: координат, измерения, аппарата, маловысотного, летательного, полярных, устройство
Текст:
...дифференцирующее устройство, согласующее устройство, пороговое устройство, причем выход датчика угла поворота вала соединен с первым информационным входом устройства хранения аналогового сигнала, выход которого соединен со входом второго индикатора, выход второго дифференциального усилителя соединен со входом дифференцирующего устройства, выход которого через последовательно соединенные с ним согласующее устройство и пороговое устройство...
Устройство измерения радиальной скорости маловысотного летательного аппарата
Номер патента: U 5391
Опубликовано: 30.06.2009
Авторы: Воинов Валерий Васильевич, Сасим Евгений Николаевич, Мокринский Владимир Валерьевич, Мицкевич Дмитрий Михайлович
МПК: G01R 29/12
Метки: устройство, маловысотного, скорости, аппарата, летательного, радиальной, измерения
Текст:
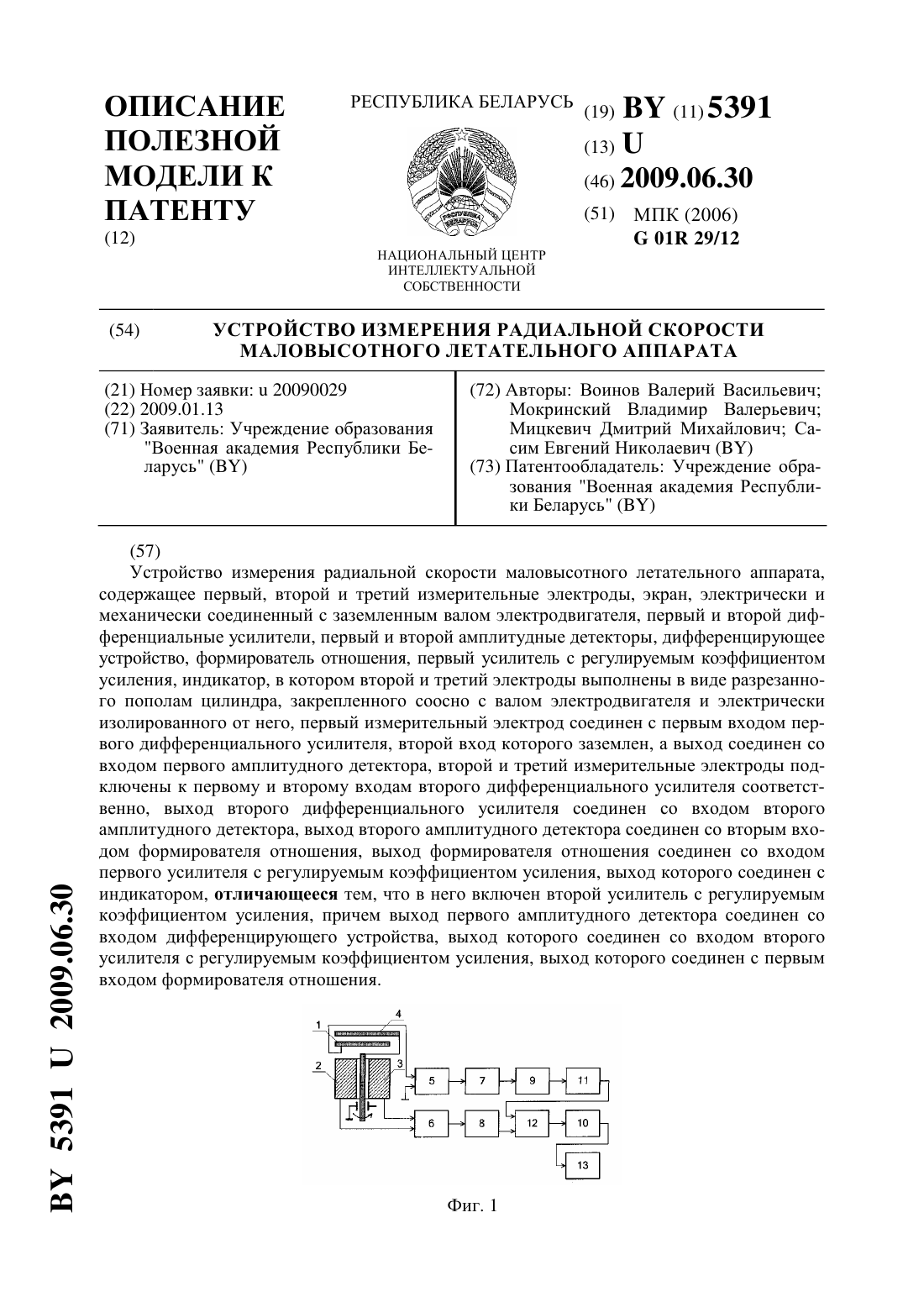
...аппарата, содержащее пер 2 53912009.06.30 вый, второй и третий измерительные электроды, экран, электрически и механически соединенный с заземленным валом электродвигателя, первый и второй дифференциальные усилители, первый и второй амплитудные детекторы, дифференцирующее устройство,формирователь отношения, первый усилитель с регулируемым коэффициентом усиления,индикатор, в котором второй и третий электроды выполнены в виде...
Предыдущий патент: Устройство для измельчения твердого битумного материала с автоматизированной загрузкой
Следующий патент: Способ получения модифицированного крахмала
Случайный патент: Способ получения висмут замещенного железо-иттриевого граната