Патенты с меткой «автопилот»
Робастный автопилот канала тангажа летательного аппарата
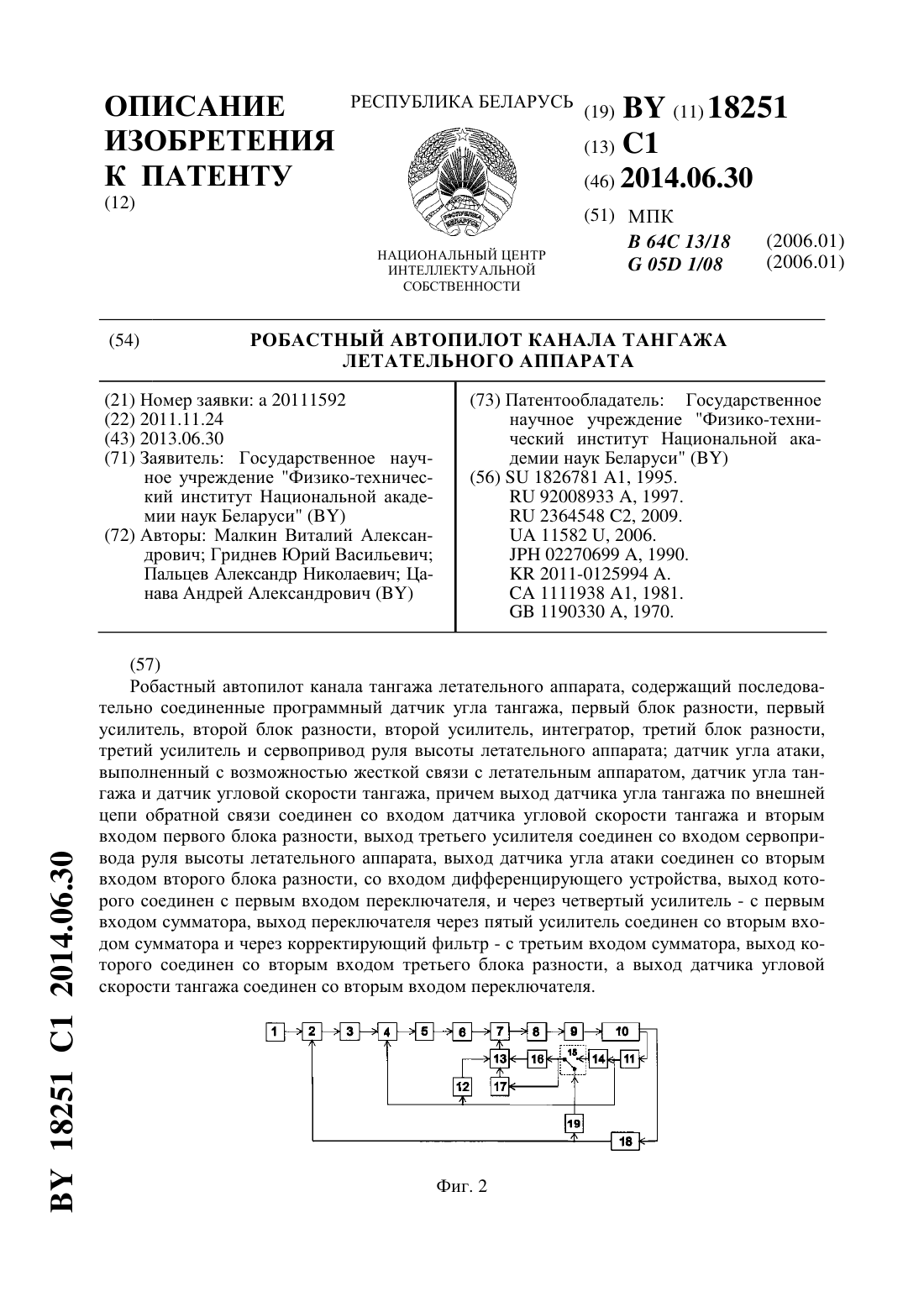
Номер патента: 18251
Опубликовано: 30.06.2014
Авторы: Гриднев Юрий Васильевич, Малкин Виталий Александрович, Цанава Андрей Александрович, Пальцев Александр Николаевич
МПК: G05D 1/08, B64C 13/18
Метки: робастный, автопилот, тангажа, летательного, канала, аппарата
Текст:
...Из уравнения (2) при а 31 находим третью производную фазовой траектории автопилотаа 0 вха 0 а 1 а 2.(5) Тогда с учетом выполнения условия близости переходного процесса автопилота и планера ЛА можно записать приблизительное равенство между фазовыми траекториями автопилота и планера ЛА,,,(6) что позволяет уравнение (5) записать в виде(7) После интегрирования уравнения (7) при нулевых начальных условиях получим вторую производную(8) и...
Робастный автопилот канала крена
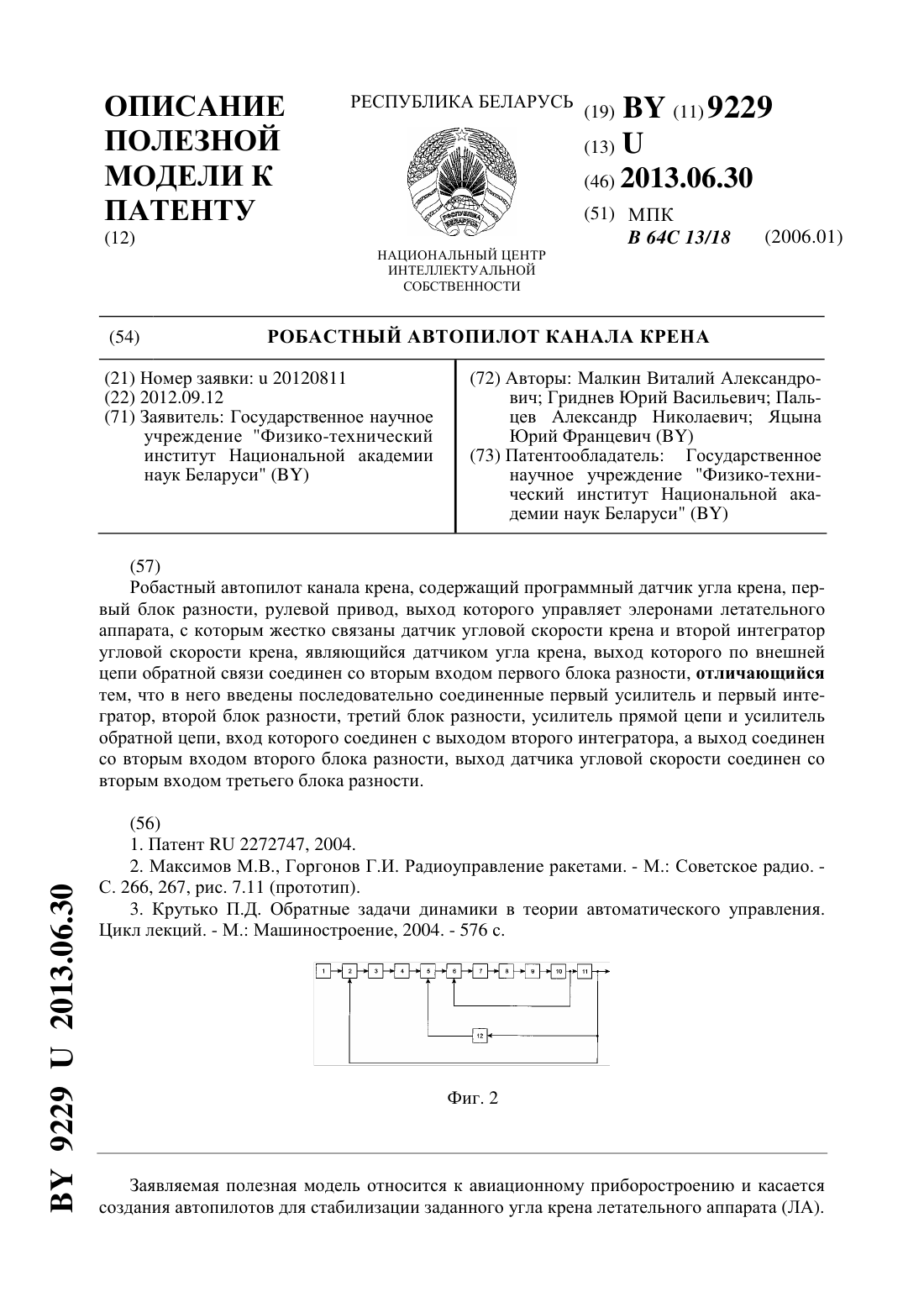
Номер патента: U 9229
Опубликовано: 30.06.2013
Авторы: Пальцев Александр Николаевич, Малкин Виталий Александрович, Яцына Юрий Францевич, Гриднев Юрий Васильевич
МПК: B64C 13/18
Метки: робастный, канала, крена, автопилот
Текст:
...динамики 3, которая позволяет определить закон управляющего сигнала на входе сервопривода автопилота. При синтезе передаточной характеристики робастного автопилота обеспечивают инвариантность характеристик переходного и установившегося режимов работы автопилота к изменению параметров планера ЛА. Известно, что передаточная функция БЛА (беспилотного летательного аппарата) по каналу крена имеет астатизм первого порядка, следовательно,...
Робастный автопилот канала тангажа
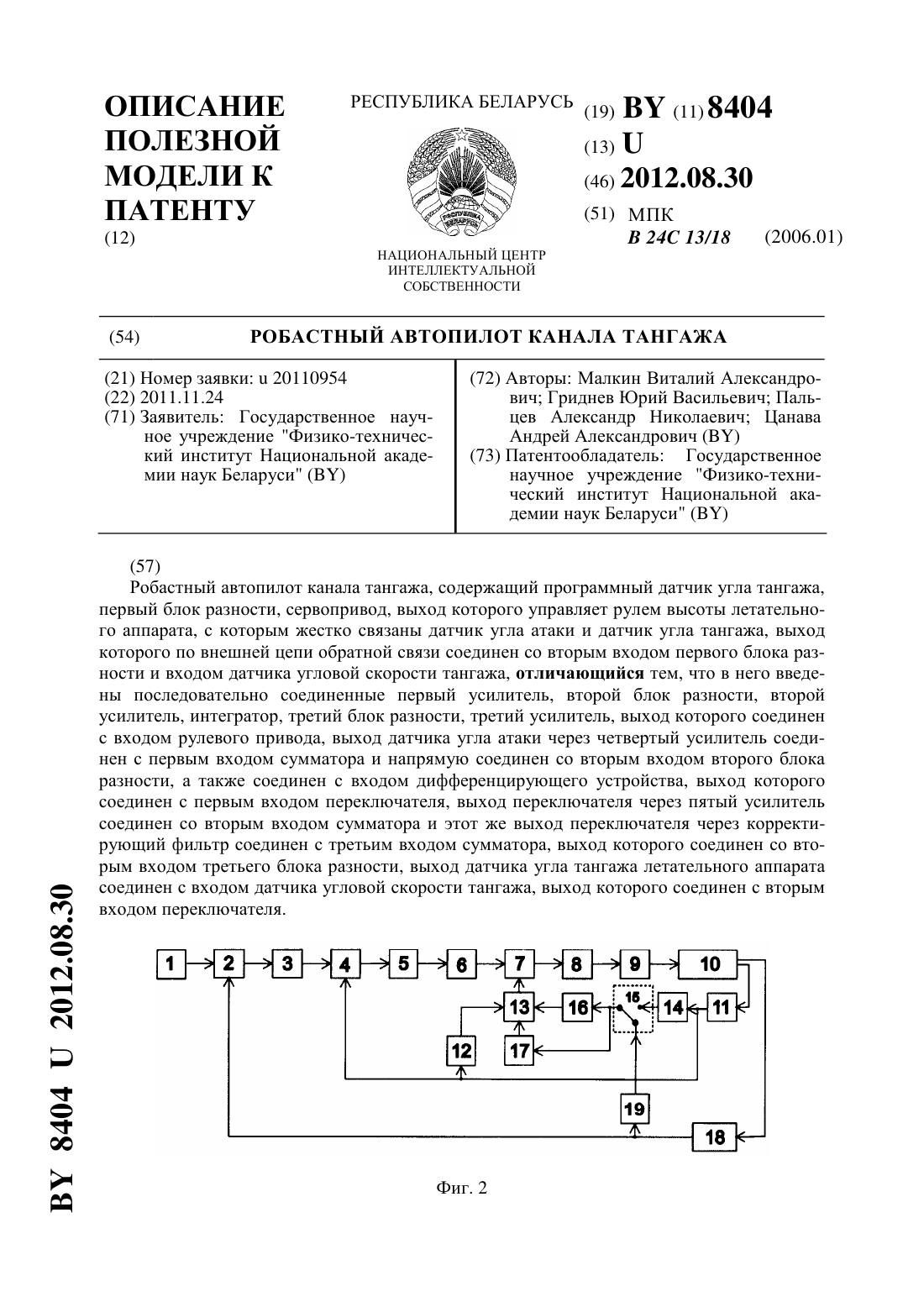
Номер патента: U 8404
Опубликовано: 30.08.2012
Авторы: Гриднев Юрий Васильевич, Цанава Андрей Александрович, Пальцев Александр Николаевич, Малкин Виталий Александрович
МПК: B24C 13/18
Метки: робастный, автопилот, тангажа, канала
Текст:
...выбрано звено 3 порядка для канала тангажа. Условием близости двух траекторий автопилотаи планера ЛАпри заданной между ними ошибке ( )( )является, согласно обратной задаче динамики, условие минимумафункционала . Тогда в соответствии с этой теорией дифференциальный сигнал управления на входе сервопривода определяется видом 3,(3) где- коэффициент пропорциональности. После интегрирования соотношения (3) получаем сигнал управления на...