Робастный автопилот канала крена
Номер патента: U 9229
Опубликовано: 30.06.2013
Авторы: Гриднев Юрий Васильевич, Малкин Виталий Александрович, Пальцев Александр Николаевич, Яцына Юрий Францевич
Текст
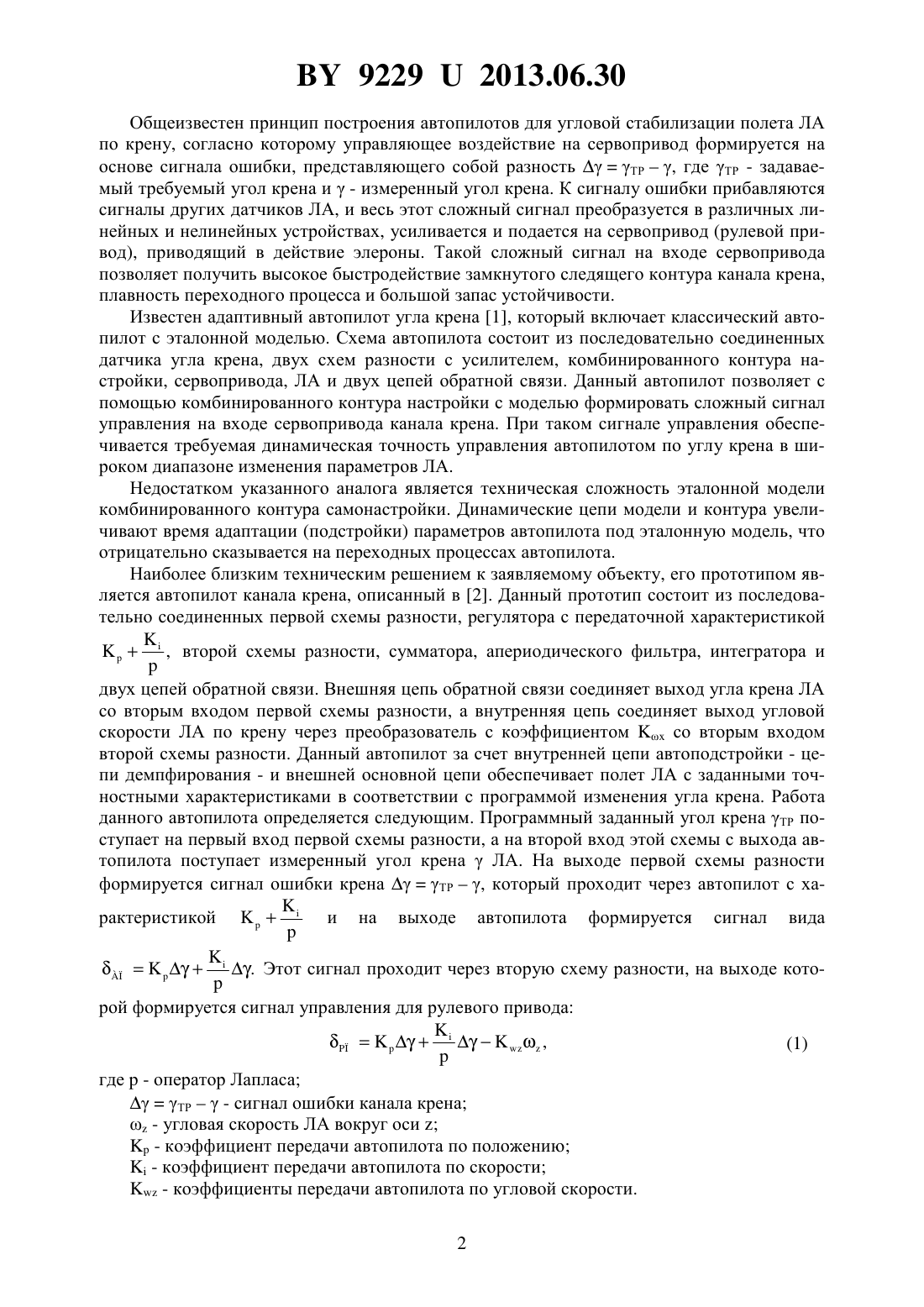
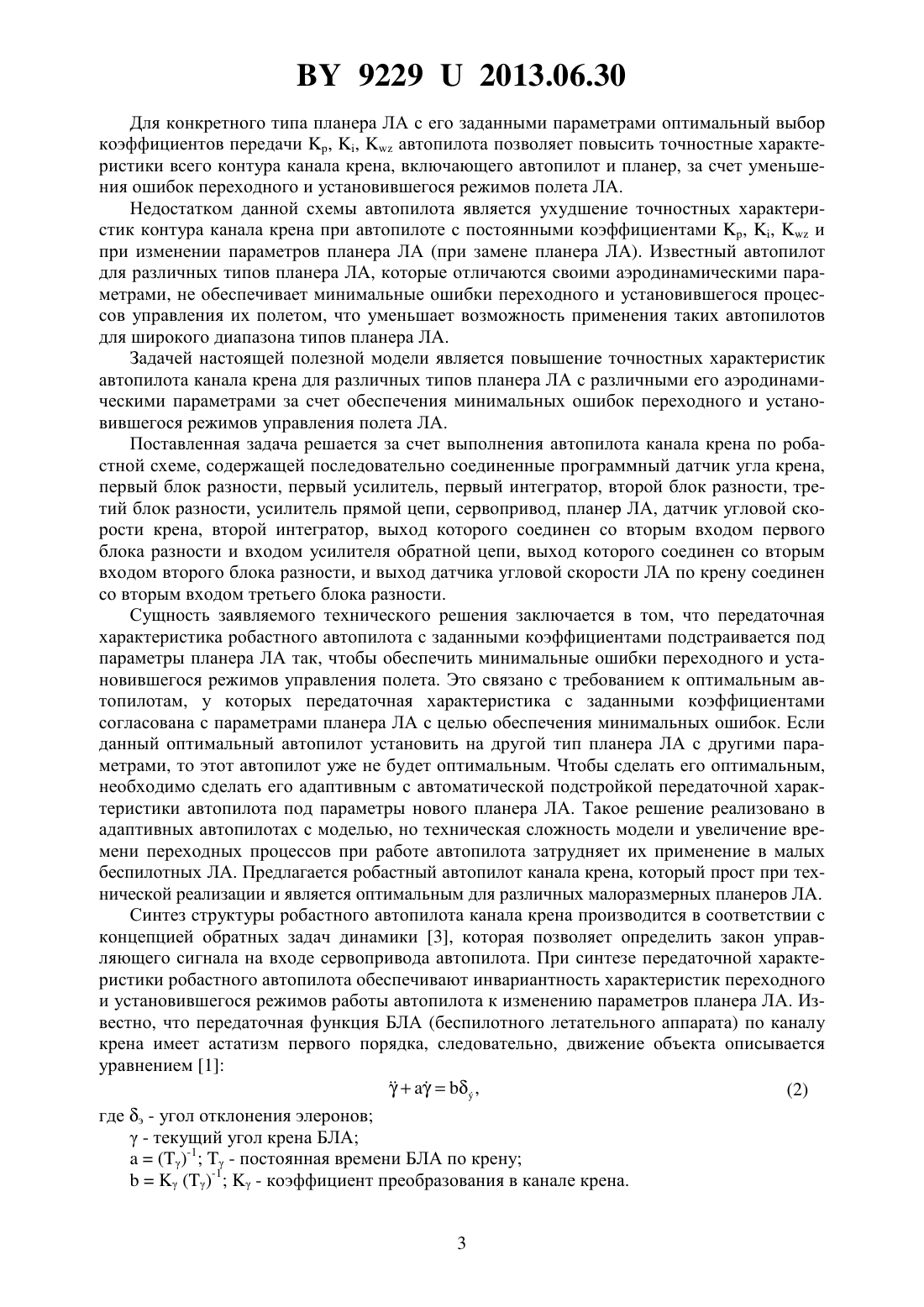
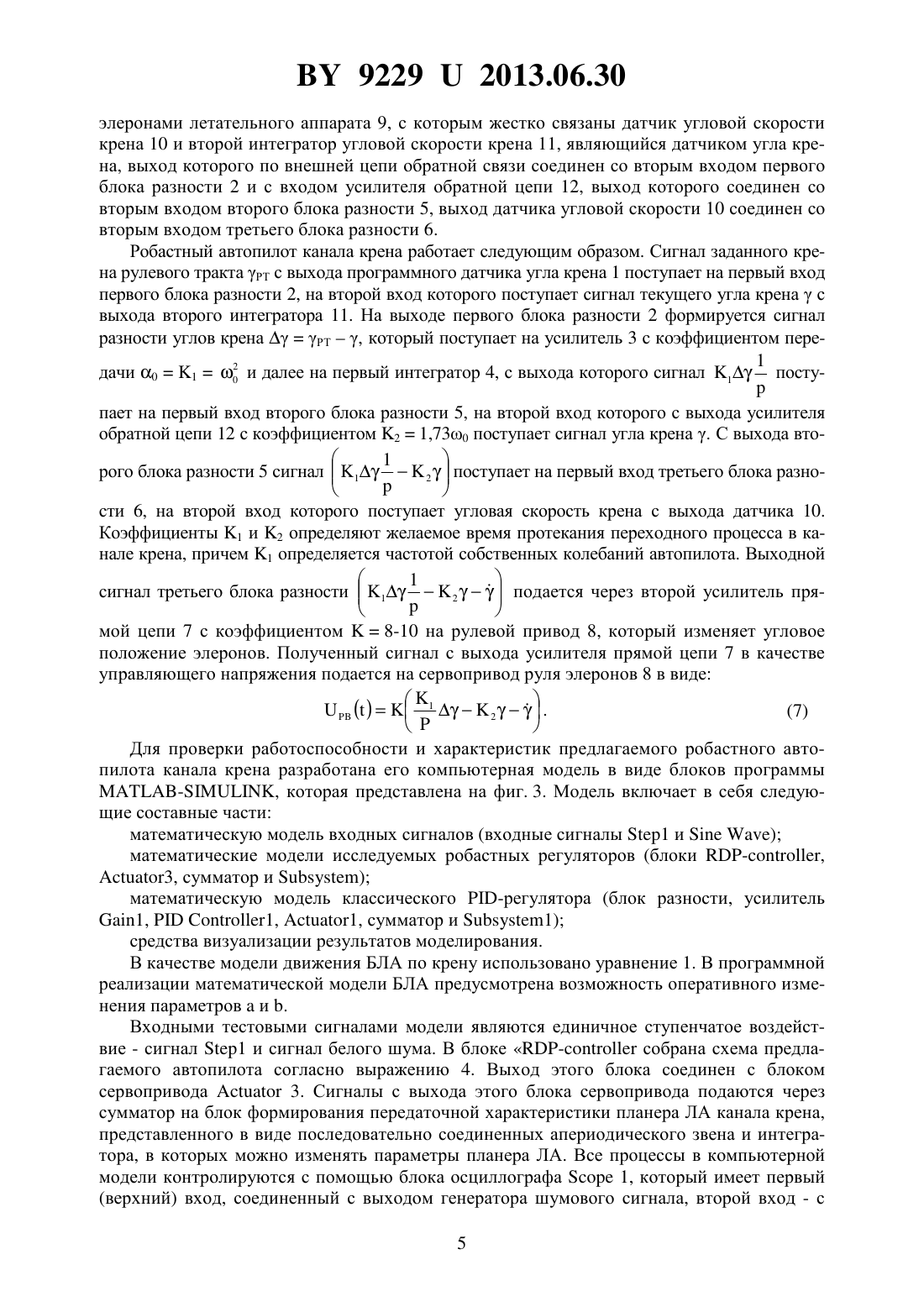
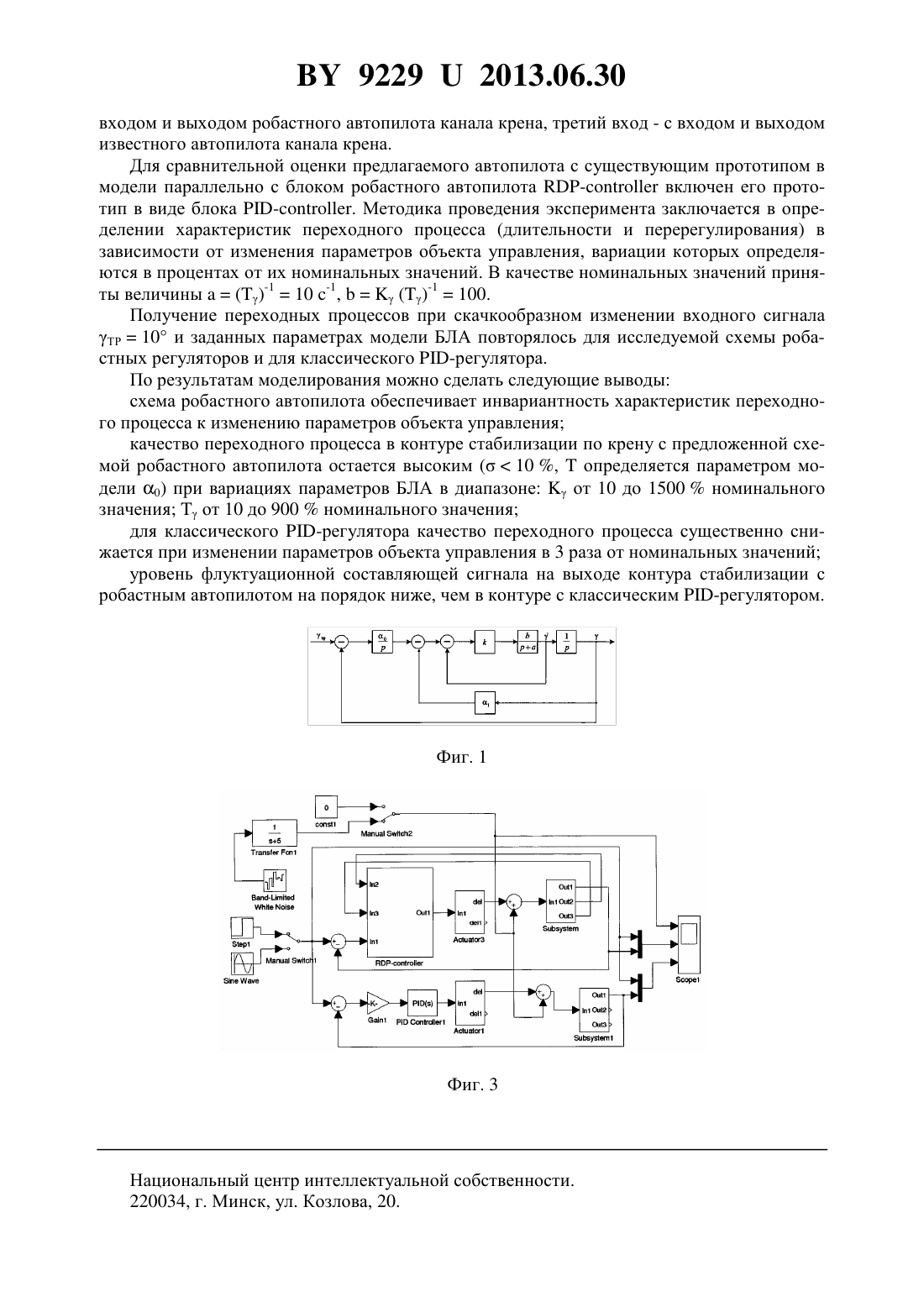
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ РОБАСТНЫЙ АВТОПИЛОТ КАНАЛА КРЕНА(71) Заявитель Государственное научное учреждение Физико-технический институт Национальной академии наук Беларуси(72) Авторы Малкин Виталий Александрович Гриднев Юрий Васильевич Пальцев Александр Николаевич Яцына Юрий Францевич(73) Патентообладатель Государственное научное учреждение Физико-технический институт Национальной академии наук Беларуси(57) Робастный автопилот канала крена, содержащий программный датчик угла крена, первый блок разности, рулевой привод, выход которого управляет элеронами летательного аппарата, с которым жестко связаны датчик угловой скорости крена и второй интегратор угловой скорости крена, являющийся датчиком угла крена, выход которого по внешней цепи обратной связи соединен со вторым входом первого блока разности, отличающийся тем, что в него введены последовательно соединенные первый усилитель и первый интегратор, второй блок разности, третий блок разности, усилитель прямой цепи и усилитель обратной цепи, вход которого соединен с выходом второго интегратора, а выход соединен со вторым входом второго блока разности, выход датчика угловой скорости соединен со вторым входом третьего блока разности.(56) 1. Патент 2272747, 2004. 2. Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М. Советское радио. С. 266, 267, рис. 7.11 (прототип). 3. Крутько П.Д. Обратные задачи динамики в теории автоматического управления. Цикл лекций. - М. Машиностроение, 2004. - 576 с. Заявляемая полезная модель относится к авиационному приборостроению и касается создания автопилотов для стабилизации заданного угла крена летательного аппарата (ЛА). 92292013.06.30 Общеизвестен принцип построения автопилотов для угловой стабилизации полета ЛА по крену, согласно которому управляющее воздействие на сервопривод формируется на основе сигнала ошибки, представляющего собой разностьТР, где ТР - задаваемый требуемый угол крена и- измеренный угол крена. К сигналу ошибки прибавляются сигналы других датчиков ЛА, и весь этот сложный сигнал преобразуется в различных линейных и нелинейных устройствах, усиливается и подается на сервопривод (рулевой привод), приводящий в действие элероны. Такой сложный сигнал на входе сервопривода позволяет получить высокое быстродействие замкнутого следящего контура канала крена,плавность переходного процесса и большой запас устойчивости. Известен адаптивный автопилот угла крена 1, который включает классический автопилот с эталонной моделью. Схема автопилота состоит из последовательно соединенных датчика угла крена, двух схем разности с усилителем, комбинированного контура настройки, сервопривода, ЛА и двух цепей обратной связи. Данный автопилот позволяет с помощью комбинированного контура настройки с моделью формировать сложный сигнал управления на входе сервопривода канала крена. При таком сигнале управления обеспечивается требуемая динамическая точность управления автопилотом по углу крена в широком диапазоне изменения параметров ЛА. Недостатком указанного аналога является техническая сложность эталонной модели комбинированного контура самонастройки. Динамические цепи модели и контура увеличивают время адаптации (подстройки) параметров автопилота под эталонную модель, что отрицательно сказывается на переходных процессах автопилота. Наиболее близким техническим решением к заявляемому объекту, его прототипом является автопилот канала крена, описанный в 2. Данный прототип состоит из последовательно соединенных первой схемы разности, регулятора с передаточной характеристикой двух цепей обратной связи. Внешняя цепь обратной связи соединяет выход угла крена ЛА со вторым входом первой схемы разности, а внутренняя цепь соединяет выход угловой скорости ЛА по крену через преобразователь с коэффициентомсо вторым входом второй схемы разности. Данный автопилот за счет внутренней цепи автоподстройки - цепи демпфирования - и внешней основной цепи обеспечивает полет ЛА с заданными точностными характеристиками в соответствии с программой изменения угла крена. Работа данного автопилота определяется следующим. Программный заданный угол крена ТР поступает на первый вход первой схемы разности, а на второй вход этой схемы с выхода автопилота поступает измеренный угол кренаЛА. На выходе первой схемы разности формируется сигнал ошибки кренаТР, который проходит через автопилот с ха рактеристикойи на выходе автопилота формируется сигнал вида. Этот сигнал проходит через вторую схему разности, на выходе кото рой формируется сигнал управления для рулевого привода где- оператор ЛапласаТР- сигнал ошибки канала крена- угловая скорость ЛА вокруг оси- коэффициент передачи автопилота по положению- коэффициент передачи автопилота по скорости- коэффициенты передачи автопилота по угловой скорости. 2 92292013.06.30 Для конкретного типа планера ЛА с его заданными параметрами оптимальный выбор коэффициентов передачи , ,автопилота позволяет повысить точностные характеристики всего контура канала крена, включающего автопилот и планер, за счет уменьшения ошибок переходного и установившегося режимов полета ЛА. Недостатком данной схемы автопилота является ухудшение точностных характеристик контура канала крена при автопилоте с постоянными коэффициентами , ,и при изменении параметров планера ЛА (при замене планера ЛА). Известный автопилот для различных типов планера ЛА, которые отличаются своими аэродинамическими параметрами, не обеспечивает минимальные ошибки переходного и установившегося процессов управления их полетом, что уменьшает возможность применения таких автопилотов для широкого диапазона типов планера ЛА. Задачей настоящей полезной модели является повышение точностных характеристик автопилота канала крена для различных типов планера ЛА с различными его аэродинамическими параметрами за счет обеспечения минимальных ошибок переходного и установившегося режимов управления полета ЛА. Поставленная задача решается за счет выполнения автопилота канала крена по робастной схеме, содержащей последовательно соединенные программный датчик угла крена,первый блок разности, первый усилитель, первый интегратор, второй блок разности, третий блок разности, усилитель прямой цепи, сервопривод, планер ЛА, датчик угловой скорости крена, второй интегратор, выход которого соединен со вторым входом первого блока разности и входом усилителя обратной цепи, выход которого соединен со вторым входом второго блока разности, и выход датчика угловой скорости ЛА по крену соединен со вторым входом третьего блока разности. Сущность заявляемого технического решения заключается в том, что передаточная характеристика робастного автопилота с заданными коэффициентами подстраивается под параметры планера ЛА так, чтобы обеспечить минимальные ошибки переходного и установившегося режимов управления полета. Это связано с требованием к оптимальным автопилотам, у которых передаточная характеристика с заданными коэффициентами согласована с параметрами планера ЛА с целью обеспечения минимальных ошибок. Если данный оптимальный автопилот установить на другой тип планера ЛА с другими параметрами, то этот автопилот уже не будет оптимальным. Чтобы сделать его оптимальным,необходимо сделать его адаптивным с автоматической подстройкой передаточной характеристики автопилота под параметры нового планера ЛА. Такое решение реализовано в адаптивных автопилотах с моделью, но техническая сложность модели и увеличение времени переходных процессов при работе автопилота затрудняет их применение в малых беспилотных ЛА. Предлагается робастный автопилот канала крена, который прост при технической реализации и является оптимальным для различных малоразмерных планеров ЛА. Синтез структуры робастного автопилота канала крена производится в соответствии с концепцией обратных задач динамики 3, которая позволяет определить закон управляющего сигнала на входе сервопривода автопилота. При синтезе передаточной характеристики робастного автопилота обеспечивают инвариантность характеристик переходного и установившегося режимов работы автопилота к изменению параметров планера ЛА. Известно, что передаточная функция БЛА (беспилотного летательного аппарата) по каналу крена имеет астатизм первого порядка, следовательно, движение объекта описывается уравнением 1,(2) где э - угол отклонения элеронов- текущий угол крена БЛА-1- постоянная времени БЛА по крену-1- коэффициент преобразования в канале крена. 3 92292013.06.30 Предполагается, что параметры ,могут изменяться в процессе функционирования БЛА. Требуется синтезировать закон управления, обеспечивающий требуемое качество переходного и установившегося режимов, а также инвариантность характеристик переходного процесса к изменению параметрови . Определим сигнал управления на входе сервопривода робастного автопилота. В соответствии с методикой синтеза, изложенной в 3, требуется найти структуру и параметры регулятора, обеспечивающие на выходе замкнутого контура стабилизации такой же процесс, как и на выходе эталонной модели, в качестве которой принята линейная система второго порядка 100,,- вторая и первая производные времени сигнала на выходе автопилотаТР - сигнал на входе автопилота. Коэффициенты модели 0 и 1 выбираются таким образом, чтобы обеспечить требуе 2 мое качество переходного процесса в контуре стабилизации. Коэффициент 00 определяет скорость протекания переходного процесса, коэффициент 11,730 влияет на величину перерегулирования и скорость затухания колебаний в контуре, 0 - частота собственных колебаний автопилота. Искомый закон управления выбирается исходя из минимума квадратичной функции 2( )0,5( )при условии близости фазовых траекторий автопилотаипланера ЛАпри заданной между ними ошибке. В результате синтеза получено управляющее воздействие на входе сервопривода следующего вида 2 01,(4) где- постоянный коэффициент, принимающий значение в диапазоне 8-10. Согласно полученному уравнению 4, математическая модель предлагаемого робастного автопилота показана на фиг. 1. Данная модель состоит из последовательно соединенных первой схемы разности канала крена, автопилота, который включает последовательно третьей схемы разности последовательно соединен с сервоприводом с коэффициентом , с планером ЛА с передаточной характеристикой канала крена по угловой скоростии углу крена. Передаточная функция замкнутого контура стабилизации канала крена, структурная схема которого представлена на фиг. 1, равна 03(5) 210 При выполнении условияпередаточная функция (4) принимает вид 0( )210 Ввиду малости коэффициента -1 передаточная функция 6 почти равна передаточной функции эталонной модели 2, и схема автопилота оказывается работоспособной. На фиг. 2 изображена структурная схема предлагаемого робастного автопилота канала крена, которая соответствует уравнению 4. Робастный автопилот канала крена ЛА для управления углом элеронов содержит последовательно соединенные программный датчик угла крена 1, первый блок разности 2,первый усилитель 3 с коэффициентом 0, первый интегратор 4, второй блок разности 5,третий блок разности 6, второй усилитель 7, рулевой привод 8, выход которого управляет 92292013.06.30 элеронами летательного аппарата 9, с которым жестко связаны датчик угловой скорости крена 10 и второй интегратор угловой скорости крена 11, являющийся датчиком угла крена, выход которого по внешней цепи обратной связи соединен со вторым входом первого блока разности 2 и с входом усилителя обратной цепи 12, выход которого соединен со вторым входом второго блока разности 5, выход датчика угловой скорости 10 соединен со вторым входом третьего блока разности 6. Робастный автопилот канала крена работает следующим образом. Сигнал заданного крена рулевого тракта РТ с выхода программного датчика угла крена 1 поступает на первый вход первого блока разности 2, на второй вход которого поступает сигнал текущего угла кренас выхода второго интегратора 11. На выходе первого блока разности 2 формируется сигнал разности углов кренаРТ, который поступает на усилитель 3 с коэффициентом пере 1 2 дачи 010 и далее на первый интегратор 4, с выхода которого сигнал 1 посту пает на первый вход второго блока разности 5, на второй вход которого с выхода усилителя обратной цепи 12 с коэффициентом 21,730 поступает сигнал угла крена . С выхода вто 1 рого блока разности 5 сигнал 12 поступает на первый вход третьего блока разно сти 6, на второй вход которого поступает угловая скорость крена с выхода датчика 10. Коэффициенты 1 и 2 определяют желаемое время протекания переходного процесса в канале крена, причем 1 определяется частотой собственных колебаний автопилота. Выходной сигнал третьего блока разности 12 подается через второй усилитель пря мой цепи 7 с коэффициентом 8-10 на рулевой привод 8, который изменяет угловое положение элеронов. Полученный сигнал с выхода усилителя прямой цепи 7 в качестве управляющего напряжения подается на сервопривод руля элеронов 8 в виде Для проверки работоспособности и характеристик предлагаемого робастного автопилота канала крена разработана его компьютерная модель в виде блоков программы-, которая представлена на фиг. 3. Модель включает в себя следующие составные части математическую модель входных сигналов (входные сигналы 1 и) математические модели исследуемых робастных регуляторов (блоки -,3, сумматор и ) математическую модель классического -регулятора (блок разности, усилитель 1,1, 1, сумматор и 1) средства визуализации результатов моделирования. В качестве модели движения БЛА по крену использовано уравнение 1. В программной реализации математической модели БЛА предусмотрена возможность оперативного изменения параметрови . Входными тестовыми сигналами модели являются единичное ступенчатое воздействие - сигнал 1 и сигнал белого шума. В блоке - собрана схема предлагаемого автопилота согласно выражению 4. Выход этого блока соединен с блоком сервопривода 3. Сигналы с выхода этого блока сервопривода подаются через сумматор на блок формирования передаточной характеристики планера ЛА канала крена,представленного в виде последовательно соединенных апериодического звена и интегратора, в которых можно изменять параметры планера ЛА. Все процессы в компьютерной модели контролируются с помощью блока осциллографа 1, который имеет первый(верхний) вход, соединенный с выходом генератора шумового сигнала, второй вход - с 92292013.06.30 входом и выходом робастного автопилота канала крена, третий вход - с входом и выходом известного автопилота канала крена. Для сравнительной оценки предлагаемого автопилота с существующим прототипом в модели параллельно с блоком робастного автопилота - включен его прототип в виде блока -. Методика проведения эксперимента заключается в определении характеристик переходного процесса (длительности и перерегулирования) в зависимости от изменения параметров объекта управления, вариации которых определяются в процентах от их номинальных значений. В качестве номинальных значений приняты величины-110 -1,-1100. Получение переходных процессов при скачкообразном изменении входного сигнала ТР 10 и заданных параметрах модели БЛА повторялось для исследуемой схемы робастных регуляторов и для классического -регулятора. По результатам моделирования можно сделать следующие выводы схема робастного автопилота обеспечивает инвариантность характеристик переходного процесса к изменению параметров объекта управления качество переходного процесса в контуре стабилизации по крену с предложенной схемой робастного автопилота остается высоким (10 ,определяется параметром модели 0) при вариациях параметров БЛА в диапазонеот 10 до 1500 номинального значенияот 10 до 900 номинального значения для классического -регулятора качество переходного процесса существенно снижается при изменении параметров объекта управления в 3 раза от номинальных значений уровень флуктуационной составляющей сигнала на выходе контура стабилизации с робастным автопилотом на порядок ниже, чем в контуре с классическим -регулятором. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B64C 13/18
Метки: робастный, канала, автопилот, крена
Код ссылки
<a href="https://by.patents.su/6-u9229-robastnyjj-avtopilot-kanala-krena.html" rel="bookmark" title="База патентов Беларуси">Робастный автопилот канала крена</a>
Робастный автопилот канала тангажа
Номер патента: U 8404
Опубликовано: 30.08.2012
Авторы: Гриднев Юрий Васильевич, Малкин Виталий Александрович, Пальцев Александр Николаевич, Цанава Андрей Александрович
МПК: B24C 13/18
Метки: автопилот, канала, робастный, тангажа
Текст:
...выбрано звено 3 порядка для канала тангажа. Условием близости двух траекторий автопилотаи планера ЛАпри заданной между ними ошибке ( )( )является, согласно обратной задаче динамики, условие минимумафункционала . Тогда в соответствии с этой теорией дифференциальный сигнал управления на входе сервопривода определяется видом 3,(3) где- коэффициент пропорциональности. После интегрирования соотношения (3) получаем сигнал управления на...
Устройство для контроля параметров лазерного канала управления

Номер патента: U 4834
Опубликовано: 30.12.2008
Авторы: Тареев Анатолий Михайлович, Горбачевская Ольга Романовна, Неменёнок Александр Иванович, Топленикова Татьяна Васильевна
МПК: G01B 11/00, G02B 27/00
Метки: управления, устройство, контроля, канала, параметров, лазерного
Текст:
...приемника оптического излучения посредством проекционной системы оптически сопряжена с рабочей поверхностью второй сетки, а третий объектив и плоское зеркало имеют возможность вывода из хода лучей. Обеспечение возможности вывода из хода лучей плоского зеркала, расположенного между первым и вторым объективами под углом к оси первого объектива, введение второго объектива, установленного между первым объективом и первой сеткой с...
Устройство мажоритарного декодирования с мягким решением на выходе канала связи

Номер патента: U 8653
Опубликовано: 30.10.2012
Авторы: Салас Валор Нестор Альфредо, Макейчик Екатерина Геннадьевна, Борискевич Анатолий Антонович, Королёв Алексей Иванович, Хоанг Нгок Зыонг, Конопелько Валерий Константинович
МПК: H03M 13/43, H04K 1/00
Метки: выходе, устройство, мягким, мажоритарного, связи, канала, декодирования, решением
Текст:
...принцип работы устройства мажоритарного декодирования при использовании циклического кода Хэмминга с параметрами (0)(7 3 4), при квантовании выходных сигналов демодулятора канала связи с однократной или двухфазовой модуляцией или ФМ-2 на 8 уровней и когерентном способе обработки ФМ-сигналов. На фиг. 2 и 3 приведены соответственно временные диаграммы, поясняющие способ формирования мягкого решения на выходе канала связи путем квантования...
Прибор для контроля параметров лазерного канала управления
Номер патента: U 4763
Опубликовано: 30.10.2008
Авторы: Тареев Анатолий Михайлович, Горбачевская Ольга Романовна, Поконечный Здислав Иосифович
МПК: G02B 27/00, G01B 11/00
Метки: управления, параметров, лазерного, канала, прибор, контроля
Текст:
...габаритные размеры прибора. На фиг. представлена принципиальная схема заявляемого прибора. Прибор для контроля параметров лазерного канала управления включает расположенные последовательно на одной оси объектив 1, спектроделитель 2, отражающий видимое и часть пучка лазерного излучения и пропускающий часть пучка лазерного излучения, установленный под углом к этой оси, устройство разделения каналов 3, конвертор 4, первую сетку 5,...
Устройство для контроля параметров лазерного канала управления
Номер патента: U 3109
Опубликовано: 30.10.2006
Авторы: Захаренко Владимир Николаевич, Горбачевская Ольга Романовна, Поконечный Здислав Иосифович, Миранович Георгий Владимирович, Тареев Анатолий Михайлович
МПК: G01B 11/00, G02B 27/00
Метки: параметров, управления, лазерного, устройство, канала, контроля
Текст:
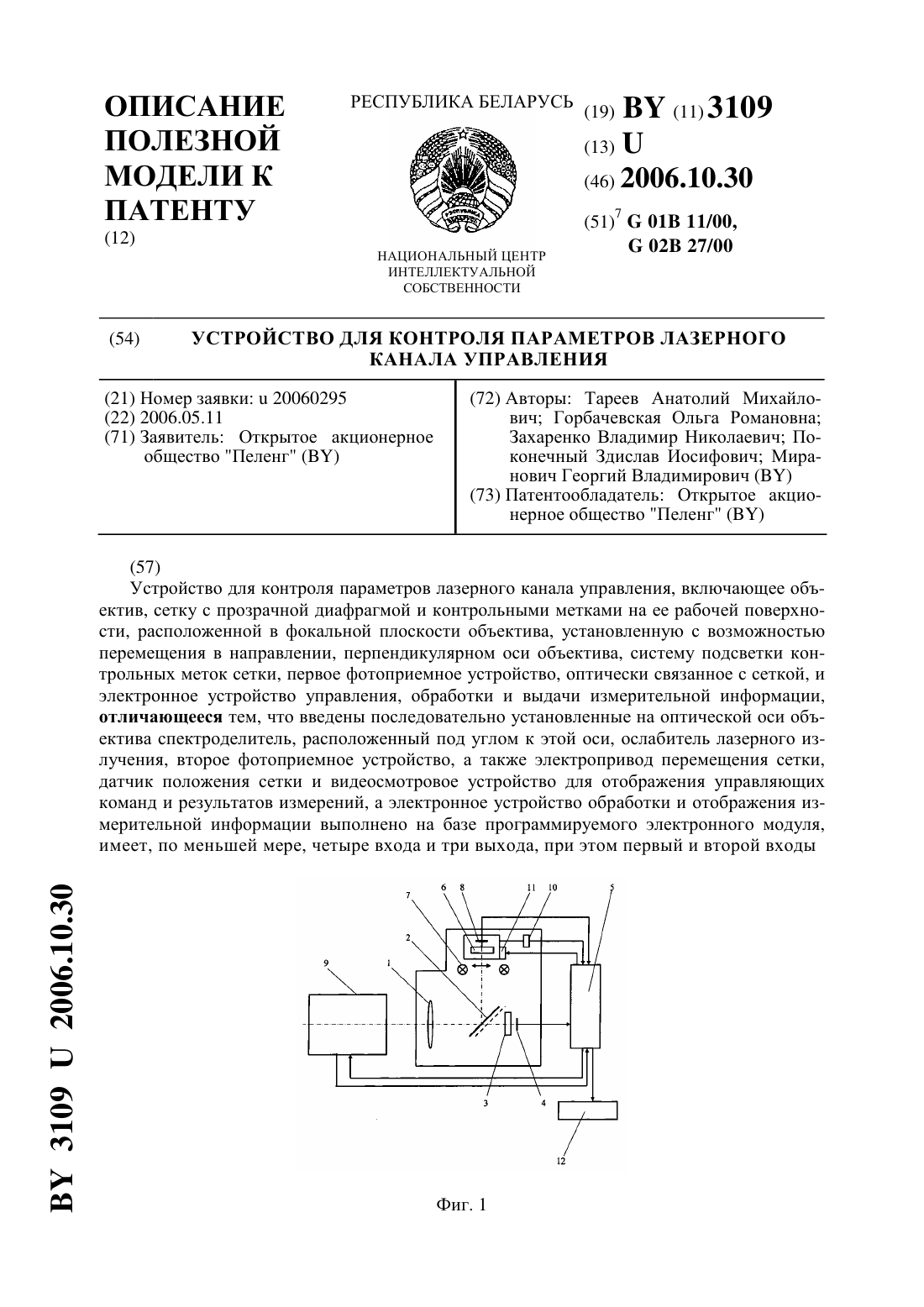
...сетки, третий выход - к видеосмотровому устройству 12. Видеосмотровое устройство 12 может быть встроенным в электронное устройство 5 обработки и отображения измерительной информации или выполнено в виде отдельного блока. Электронное устройство обработки и отображения измерительной информации,фиг. 2, включает, по меньшей мере, блок выделения команд (БВК) 13, аналоговоцифровой преобразователь (АЦП) 14, контроллер 15, блок управления (БУ) 16 и...
Предыдущий патент: Контейнер для приготовления яиц без скорлупы (варианты)
Следующий патент: Устройство для изготовления изделий из теста с начинкой
Случайный патент: Способ определения содержания лактулозы в кисломолочном продукте