Способ регулирования скорости торможения кабины лифта
Номер патента: 18515
Опубликовано: 30.08.2014
Авторы: Шваяков Андрей Викторович, Коваль Александр Сергеевич, Ефименко Евгений Викторович
Текст
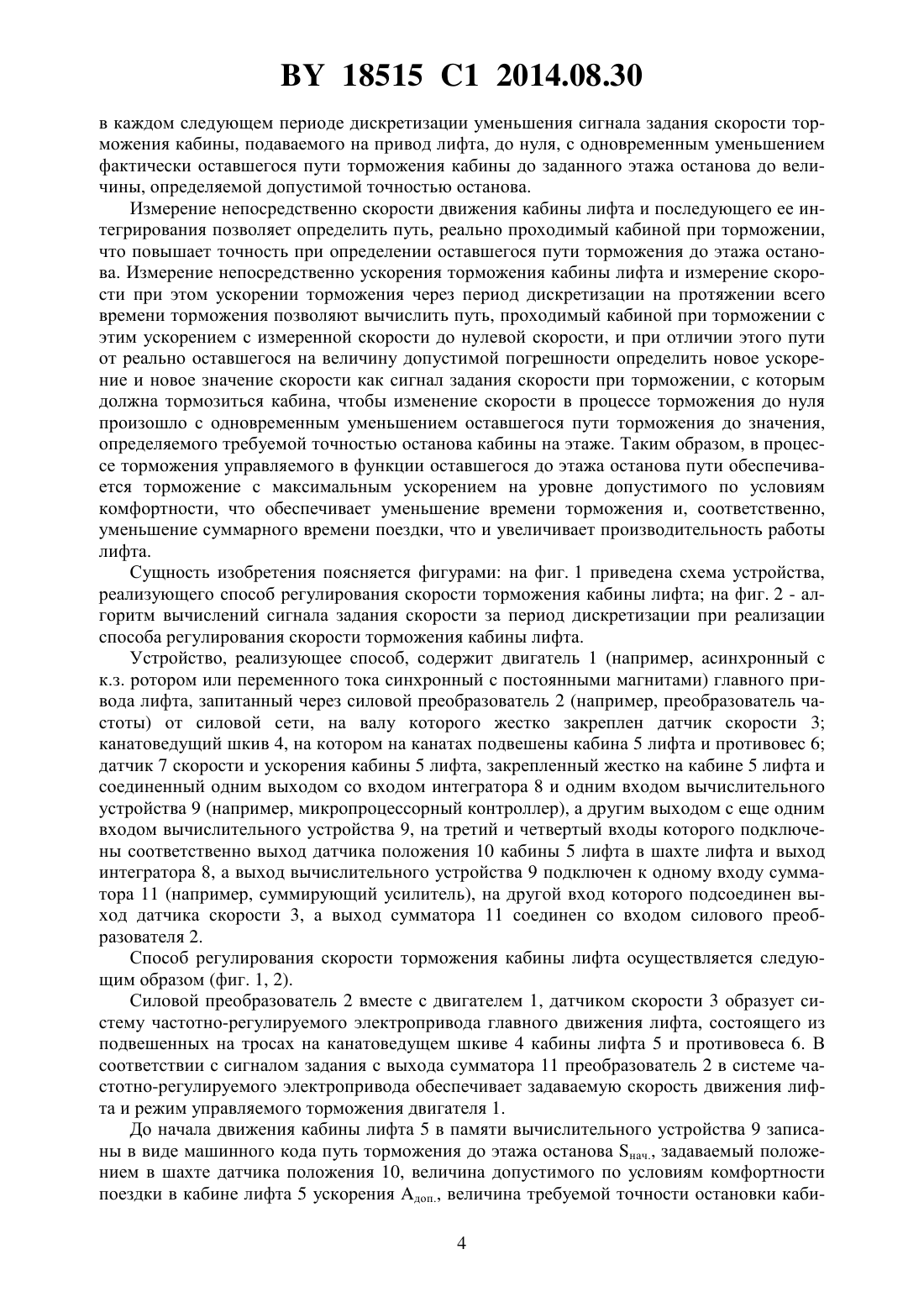
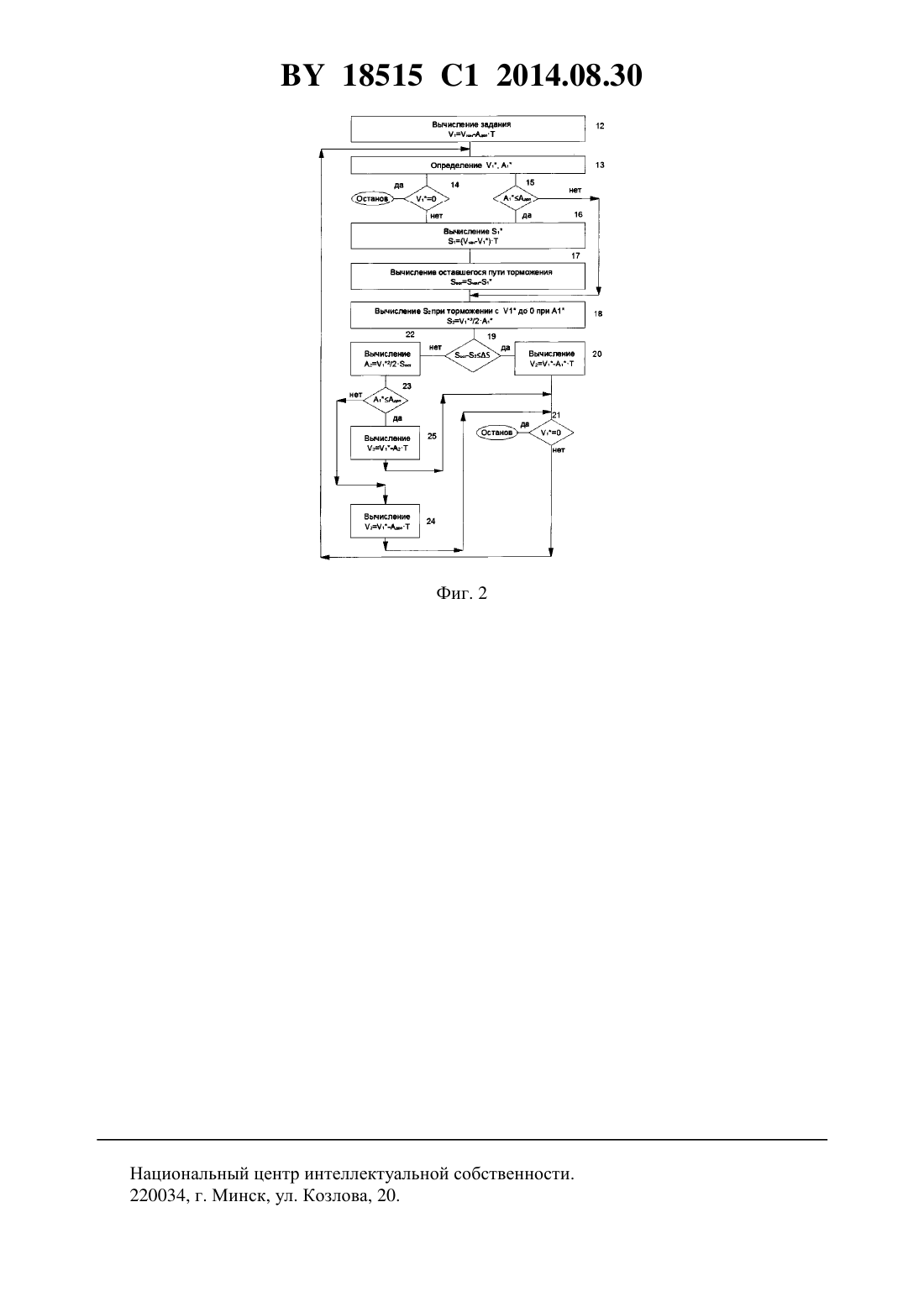
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ТОРМОЖЕНИЯ КАБИНЫ ЛИФТА(71) Заявитель Государственное учреждение высшего профессионального образования БелорусскоРоссийский университет(72) Авторы Коваль Александр Сергеевич Шваяков Андрей Викторович Ефименко Евгений Викторович(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) Способ регулирования скорости торможения кабины лифта, при котором определяют ускорение торможения кабины, оставшийся путь торможения кабины до заданного этажа останова, формируют соответствующий сигнал задания скорости торможения и подают на привод лифта, отличающийся тем, что на всем пути торможения кабины осуществляют дискретные измерения непосредственно ее ускорения и скорости, интегрируют скорость торможения кабины для определения пройденного ею пути торможения за период дискретизации, сравнивают упомянутый путь с путем торможения до заданного этажа останова,зафиксированным посредством датчика положения кабины в шахте лифта, и по результату сравнения определяют фактически оставшийся путь торможения кабины до заданного 18515 1 2014.08.30 этажа останова в конце каждого периода дискретизации измеряют текущие значения скорости и ускорения торможения кабины и при сохранении условия постоянства упомянутого ускорения вычисляют путь, который должна пройти кабина при торможении с измеренного текущего значения ее скорости до нулевой, причем если измеренное текущее значение ускорения торможения кабины превышает допустимое значение ускорения торможения по условиям комфортности, то при расчете пути, который должна пройти кабина при торможении с измеренного текущего значения ее скорости до нулевой, используют допустимое значение ускорения торможения кабины по условиям комфортности, сравнивают упомянутый путь с ранее определенным фактически оставшимся путем торможения кабины до заданного этажа останова и в случае, если эти пути отличаются на величину,большую требуемой точности останова, вычисляют по фактически оставшемуся пути торможения кабины до заданного этажа останова и значению текущей скорости торможения кабины, измеренной в конце периода дискретизации, новое значение ускорения торможения кабины и ее скорость, которую она будет иметь в течение следующего периода дискретизации при торможении с этим новым ускорением и с выполнением требуемой точности останова по упомянутому новому значению скорости торможения кабины, которую она будет иметь в течение следующего периода дискретизации, формируют соответствующий сигнал задания скорости торможения кабины, который подают на привод лифта, причем если упомянутое новое значение ускорения торможения кабины превышает допустимое ускорение торможения по условиям комфортности, то при расчете нового значения скорости торможения, которую кабина будет иметь в течение следующего периода дискретизации, используют допустимое ускорение торможения кабины по условиям комфортности и в случае, если разность фактически оставшегося пути торможения кабины до заданного этажа останова и пути, вычисленного при торможении кабины с измеренными ускорением и скоростью, не превышает требуемую точность останова, а измеренное текущее значение ускорения торможения кабины не превышает допустимое ускорение торможения по условиям комфортности, тогда измеренное текущее ускорение торможения кабины сохраняют на фактически оставшемся пути торможения до заданного этажа останова с обеспечением в каждом следующем периоде дискретизации уменьшения сигнала задания скорости торможения кабины, подаваемого на привод лифта, до нуля, с одновременным уменьшением фактически оставшегося пути торможения кабины до заданного этажа останова до величины, определяемой допустимой точностью останова. Изобретение относится к области электротехники и может быть использовано в регулируемых электроприводах грузоподъемных механизмов, например лифтах, требующих точного позиционирования за счет регулирования скорости при останове в функции пройденного пути. Известен способ регулирования скорости торможения кабины лифта, в котором пройденный путь определяется интегрированием сигнала датчика скорости на валу двигателя главного привода, а изменение скорости торможения в функции пути торможения обеспечивается аналоговым функциональным преобразователем 1. Однако в известном способе регулирования скорости торможения кабины лифта в зависимости от пути торможения невозможно поддержать ускорение торможения на постоянном уровне при торможении, и торможение кабины проходит с ускорением,отличающимся от максимально допустимого по условиям комфортной поездки, что увеличивает общее время торможения и снижает производительность лифта. Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является способ регулирования скорости торможения кабины лифта в зависимости от пути торможения, в котором реальный путь, проходимый кабиной, опреде 2 18515 1 2014.08.30 ляется датчиком перемещения кабины, а изменение скорости, в зависимости от пройденного пути, определяется функциональным преобразователем на базе постоянного запоминающего устройства, изменяющего сигнал задания скорости при торможении 2. Но известный способ регулирования скорости торможения кабины лифта в зависимости от пути торможения, принятый за прототип, обеспечивает низкую производительность лифта. Указанный недостаток обусловлен тем, что в известном способе регулирования скорости торможения кабины лифта в зависимости от пути торможения не обеспечивается контроль ускорения при торможении кабины, соответственно, торможение проходит с ускорением, отличающимся от максимально допустимого по условиям комфортной поездки, что увеличивает общее время торможения. Увеличение суммарного времени каждой поездки, в свою очередь, уменьшает общую производительность лифта. Задачей настоящего изобретения является повышение производительности лифта. Решение указанной задачи достигается тем, что в способе регулирования скорости торможения кабины лифта, при котором определяют ускорение торможения кабины,оставшийся путь торможения кабины до заданного этажа останова, формируют соответствующий сигнал задания скорости торможения и подают на привод лифта, согласно изобретению, на всем пути торможения кабины осуществляют дискретные измерения непосредственно ее ускорения и скорости, интегрируют скорость торможения кабины для определения пройденного ею пути торможения за период дискретизации, сравнивают упомянутый путь с путем торможения до заданного этажа останова, зафиксированным посредством датчика положения кабины в шахте лифта, и по результату сравнения определяют фактически оставшийся путь торможения кабины до заданного этажа останова в конце каждого периода дискретизации измеряют текущие значения скорости и ускорения торможения кабины и при сохранении условия постоянства упомянутого ускорения вычисляют путь, который должна пройти кабина при торможении с измеренного текущего значения ее скорости до нулевой, причем если измеренное текущее значение ускорения торможения кабины превышает допустимое значение ускорения торможения по условиям комфортности, то при расчете пути, который должна пройти кабина при торможении с измеренного текущего значения ее скорости до нулевой, используют допустимое значение ускорения торможения кабины по условиям комфортности, сравнивают упомянутый путь с ранее определенным фактически оставшимся путем торможения кабины до заданного этажа останова и в случае, если эти пути отличаются на величину, большую требуемой точности останова, вычисляют по фактически оставшемуся пути торможения кабины до заданного этажа останова и значению текущей скорости торможения кабины, измеренной в конце периода дискретизации, новое значение ускорения торможения кабины и ее скорость, которую она будет иметь в течение следующего периода дискретизации при торможении с этим новым ускорением и с выполнением требуемой точности останова по упомянутому новому значению скорости торможения кабины, которую она будет иметь в течение следующего периода дискретизации, формируют соответствующий сигнал задания скорости торможения кабины, который подают на привод лифта, причем если упомянутое новое значение ускорения торможения кабины повышает допустимое ускорение торможения по условиям комфортности, то при расчете нового значения скорости торможения, которую кабина будет иметь в течение следующего периода дискретизации, используют допустимое ускорение торможения кабины по условиям комфортности, и в случае, если разность фактически оставшегося пути торможения кабины до заданного этажа останова и пути, вычисленного при торможении кабины с измеренными ускорением и скоростью не превышает требуемую точность останова, а измеренное текущее значение ускорения торможения кабины не превышает допустимое ускорение торможения по условиям комфортности, тогда измеренное текущее ускорение торможения кабины сохраняют на фактически оставшемся пути торможения до заданного этажа останова с обеспечением 3 18515 1 2014.08.30 в каждом следующем периоде дискретизации уменьшения сигнала задания скорости торможения кабины, подаваемого на привод лифта, до нуля, с одновременным уменьшением фактически оставшегося пути торможения кабины до заданного этажа останова до величины, определяемой допустимой точностью останова. Измерение непосредственно скорости движения кабины лифта и последующего ее интегрирования позволяет определить путь, реально проходимый кабиной при торможении,что повышает точность при определении оставшегося пути торможения до этажа останова. Измерение непосредственно ускорения торможения кабины лифта и измерение скорости при этом ускорении торможения через период дискретизации на протяжении всего времени торможения позволяют вычислить путь, проходимый кабиной при торможении с этим ускорением с измеренной скорости до нулевой скорости, и при отличии этого пути от реально оставшегося на величину допустимой погрешности определить новое ускорение и новое значение скорости как сигнал задания скорости при торможении, с которым должна тормозиться кабина, чтобы изменение скорости в процессе торможения до нуля произошло с одновременным уменьшением оставшегося пути торможения до значения,определяемого требуемой точностью останова кабины на этаже. Таким образом, в процессе торможения управляемого в функции оставшегося до этажа останова пути обеспечивается торможение с максимальным ускорением на уровне допустимого по условиям комфортности, что обеспечивает уменьшение времени торможения и, соответственно,уменьшение суммарного времени поездки, что и увеличивает производительность работы лифта. Сущность изобретения поясняется фигурами на фиг. 1 приведена схема устройства,реализующего способ регулирования скорости торможения кабины лифта на фиг. 2 - алгоритм вычислений сигнала задания скорости за период дискретизации при реализации способа регулирования скорости торможения кабины лифта. Устройство, реализующее способ, содержит двигатель 1 (например, асинхронный с к.з. ротором или переменного тока синхронный с постоянными магнитами) главного привода лифта, запитанный через силовой преобразователь 2 (например, преобразователь частоты) от силовой сети, на валу которого жестко закреплен датчик скорости 3 канатоведущий шкив 4, на котором на канатах подвешены кабина 5 лифта и противовес 6 датчик 7 скорости и ускорения кабины 5 лифта, закрепленный жестко на кабине 5 лифта и соединенный одним выходом со входом интегратора 8 и одним входом вычислительного устройства 9 (например, микропроцессорный контроллер), а другим выходом с еще одним входом вычислительного устройства 9, на третий и четвертый входы которого подключены соответственно выход датчика положения 10 кабины 5 лифта в шахте лифта и выход интегратора 8, а выход вычислительного устройства 9 подключен к одному входу сумматора 11 (например, суммирующий усилитель), на другой вход которого подсоединен выход датчика скорости 3, а выход сумматора 11 соединен со входом силового преобразователя 2. Способ регулирования скорости торможения кабины лифта осуществляется следующим образом (фиг. 1, 2). Силовой преобразователь 2 вместе с двигателем 1, датчиком скорости 3 образует систему частотно-регулируемого электропривода главного движения лифта, состоящего из подвешенных на тросах на канатоведущем шкиве 4 кабины лифта 5 и противовеса 6. В соответствии с сигналом задания с выхода сумматора 11 преобразователь 2 в системе частотно-регулируемого электропривода обеспечивает задаваемую скорость движения лифта и режим управляемого торможения двигателя 1. До начала движения кабины лифта 5 в памяти вычислительного устройства 9 записаны в виде машинного кода путь торможения до этажа останова нач., задаваемый положением в шахте датчика положения 10, величина допустимого по условиям комфортности поездки в кабине лифта 5 ускорения доп., величина требуемой точности остановки каби 4 18515 1 2014.08.30 ны лифта 5 на этаже , а также период дискретизации Т вычисления вычислительным устройством 9 полного времени торможениякабины лифта 5. После начала движения,при подходе к заданному этажу кабины лифта 5 и поступлении команды на торможение от датчика положения 10, вычислительное устройство 9 по известному допустимому по условиям комфортности поездки в лифте ускорению доп. с начала торможения по соотношению 1 нач.доп. вычисляет скорость 1, которую должна будет иметь кабина лифта 5 в конце периода дискретизации при торможении с допустимым ускорением доп.(блок 12). Эта скорость в виде определенной величины сигнала с выхода вычислительного устройства 9 поступает на один вход сумматора 11, на другой вход которого с датчика скорости 3 поступает сигнал реальной скорости кабины лифта 5. Выход сумматора 11 формирует сигнал задания скорости при торможении кабины лифта на период дискретизации . В конце периода дискретизациивычислительное устройство 9 с одного выхода датчика 7 скорости и ускорения определяет реальную текущую скорость 1 и с другого ускорение 1 кабины лифта 5 в процессе торможения (блок 13). Если измеренная скорость 1 отличается от нуля (блок 14), а измеренное ускорение 1 не превышает допустимого доп. (блок 15), то по сигналу с выхода интегратора 8 вычислительное устройство 9 определяет путь 1, пройденный кабиной лифта 5 в процессе торможения за период дискретизации(блок 16). Сравнением пути, проходимого кабиной лифта за период дискретизации 1, и всего пути торможения до этажа останова нач. вычислительное устройство 9 определяет оставшийся путь торможения до этажа останова ост. (блок 17). По величине измеренной скорости 1 и ускорения 1, которыми обладает кабина лифта 5 в конце периода дискретизации , и считая торможение кабины лифта 5 в первом приближении равнопеременным движением с постоянным ускорением и равным измеренному датчиком скорости и ускорения 7 1, по соотношению 21/21 вычислительное устройство 9 определяет путь торможения 2 кабины лифта 5 с измеренной скорости 1 до нуля (блок 18). Если измеренное ускорение 1 (блок 15) превышает доп., то в расчете пути 2 (блок 18) принимается ускорение Адоп Рассчитанный путь 2 сравнивается с оставшимся реальным путем торможения ост. до этажа останова (блок 19). Если разность вычисленного и реально оставшегося пути торможения укладывается в допустимую точность остановаи измеренное ускорение 1 (блок 15), по которому рассчитывался путь торможения, не превышает допустимого ускорения доп., то в следующий период дискретизациипродолжается процесс торможения с этим ускорением, и это ускорение берется для расчета значения скорости в конце следующего периода дискретизации (блок 20) как сигнала задания скорости кабины лифта 5 в процессе торможения (блок 21). Если разность вычисленного и реально оставшегося пути торможения не укладывается в допустимую точность , то по величине оставшегося реального пути торможения ост. и величине измеренной скорости 1 в конце рассматриваемого периода дискретизациивычисляется необходимое ускорение торможения 2 по выражению 21/2 ост. для случая торможения с измеренной скорости 1 до нуля (блок 22). Это ускорение сравнивается с допустимым ускорением доп. (блок 23), и если рассчитанное ускорение больше допустимого по условиям комфортности, то допустимое ускорение доп. используется для расчета скорости как сигнал задания скорости на торможение для следующего периода дискретизации (блок 24). Если рассчитанное ускорение 2 не превышает доп., то значение скорости 2 рассчитывается по ускорению 2 (блок 25). И так процесс формирования сигнала задания скорости торможения кабины лифта 5 в зависимости от пройденного пути торможения продолжается, пока не выполнится условие, при котором разность вычисленного и реально оставшегося пути торможения в один из периодов дискретизации не будет укладываться в допустимую точность останова на этаже и измеренное ускорение при торможении не будет превышать допустимого значения по условиям комфортности. Если разность вычисленного и реально оставшегося пути торможения укладывается в допустимую точность останова и измеренное ускорение, по ко 5 18515 1 2014.08.30 торому рассчитывался путь торможения, не превышает допустимого ускорения по условиям комфортной поездки, то в следующий период дискретизации продолжается процесс торможения с этим ускорением, и это ускорение берется для расчета значения скорости как сигнала задания скорости в процессе торможения (блок 21), и, таким образом, обеспечивается уменьшение скорости задания на торможение до нуля одновременно с уменьшением оставшегося пути торможения для кабины лифта до значения, определяемого допустимой точностью останова на этаже. Если в процессе измерения скорости 1 (блок 14) и при расчете скорости 2 (блок 21) скорость принимает нулевое значение, то процесс торможения прекращается и лифт останавливается. Таким образом, в результате использования устройства, реализующего предлагаемый способ регулирования скорости торможения кабины лифта в зависимости от пути торможения, обеспечивается измерение непосредственно скорости, ускорения торможения кабины лифта и интегрированием вычисление пути, проходимого кабиной лифта при торможении. Измерение непосредственно ускорения торможения кабины лифта и скорости через период дискретизации на протяжении всего времени торможения позволяет дискретно вычислить путь торможения, проходимый кабиной при торможении с этим ускорением с измеренной скорости до нулевой скорости, и при отличии этого пути на каждом периоде дискретизации от реально оставшегося на величину заданной погрешности вычислить новое ускорение и новое значение скорости как сигнал задания скорости при торможении, с которым должна тормозиться кабина, чтобы изменение скорости в процессе торможения до нуля произошло именно на фактически оставшемся пути с заданной точностью останова кабины на этаже. При этом в процессе управляемого торможения в зависимости от оставшегося пути торможения рассчитывается и поддерживается необходимое и не превышающее допустимого по условиям комфортности ускорение. Таким образом, в процессе торможения управляемого в функции оставшегося до этажа останова пути обеспечивается торможение с максимальным ускорением на уровне допустимого по условиям комфортности, что обеспечивает уменьшение времени процесса торможения и, соответственно, уменьшение суммарного времени поездки, что увеличивает производительность работы лифта. Источники информации 1. Гершаник Ю.И., Кокорев Г.М., Симонов В.А., Соколов М.М., Чупрасов В.В., Шинянский А.В. Перспективы развития электроприводов переменного тока для лифтов со скоростью до 2 м/с. Автоматизированный электропривод в промышленности. Труды 6 Всесоюзной конференции по автоматизированному электроприводу. - М. Энергия, 1974. С. 263-265. 2. Патент 004527662, 1985. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
Метки: лифта, кабины, торможения, скорости, регулирования, способ
Код ссылки
<a href="https://by.patents.su/7-18515-sposob-regulirovaniya-skorosti-tormozheniya-kabiny-lifta.html" rel="bookmark" title="База патентов Беларуси">Способ регулирования скорости торможения кабины лифта</a>
Ограничитель скорости двухстороннего действия для лифта

Номер патента: 12082
Опубликовано: 30.06.2009
Авторы: Рыжков Юрий Михайлович, Иванов Виктор Иванович
МПК: B66B 5/04
Метки: ограничитель, лифта, скорости, двухстороннего, действия
Текст:
...конструкции включает ловители только при наличии каната ограничителя скорости. Задача изобретения - повышение безопасности путем обеспечения двухстороннего контроля скорости кабины лифта. Указанная задача достигается тем, что в ограничителе скорости двухстороннего действия для лифта, содержащем корпус, в котором на оси с возможностью вращения установлен шкив с подпружиненными центробежными грузами, имеющими выступы, согласно изобретению,...
Способ формирования сигнала задания тахограммы движения для электропривода лифта
Номер патента: 13120
Опубликовано: 30.04.2010
Авторы: Шваяков Андрей Викторович, Коваль Александр Сергеевич
Метки: сигнала, способ, задания, электропривода, движения, лифта, тахограммы, формирования
Текст:
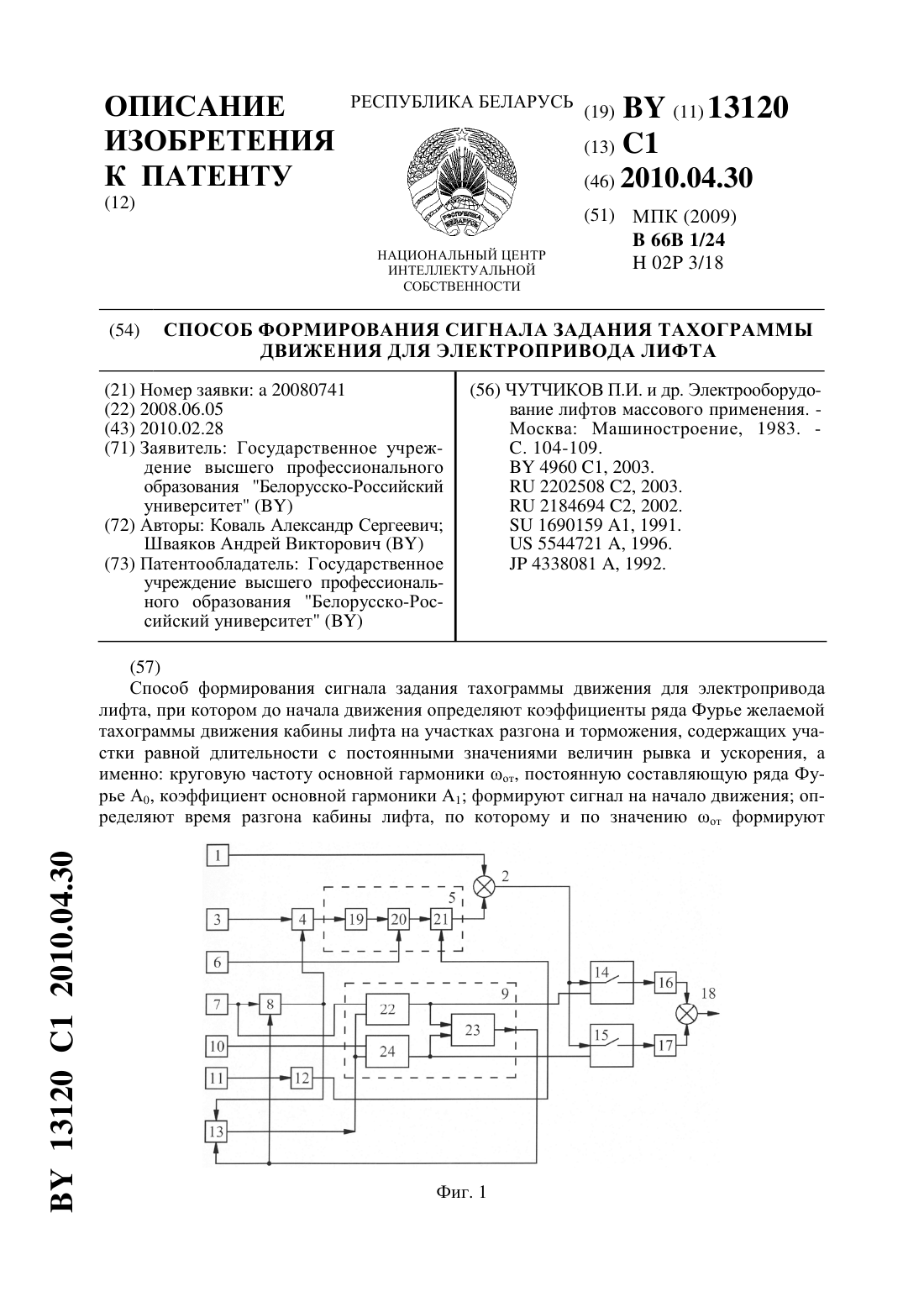
...основной гармоники блок 7 формирования команды на начало работы устройства, например, замыкающий контакт, выход которого соединен с одним входом таймера 8 и первым входом блока 9 логики блок 10 формирования команды на начало торможения, например замыкающий контакт датчика точной остановки в шахте лифта, и выход которого соединен со вторым входом блока 9 логики блок 11 определения этажа вызова кабины лифта, например кнопка вызова на этаж, и,...
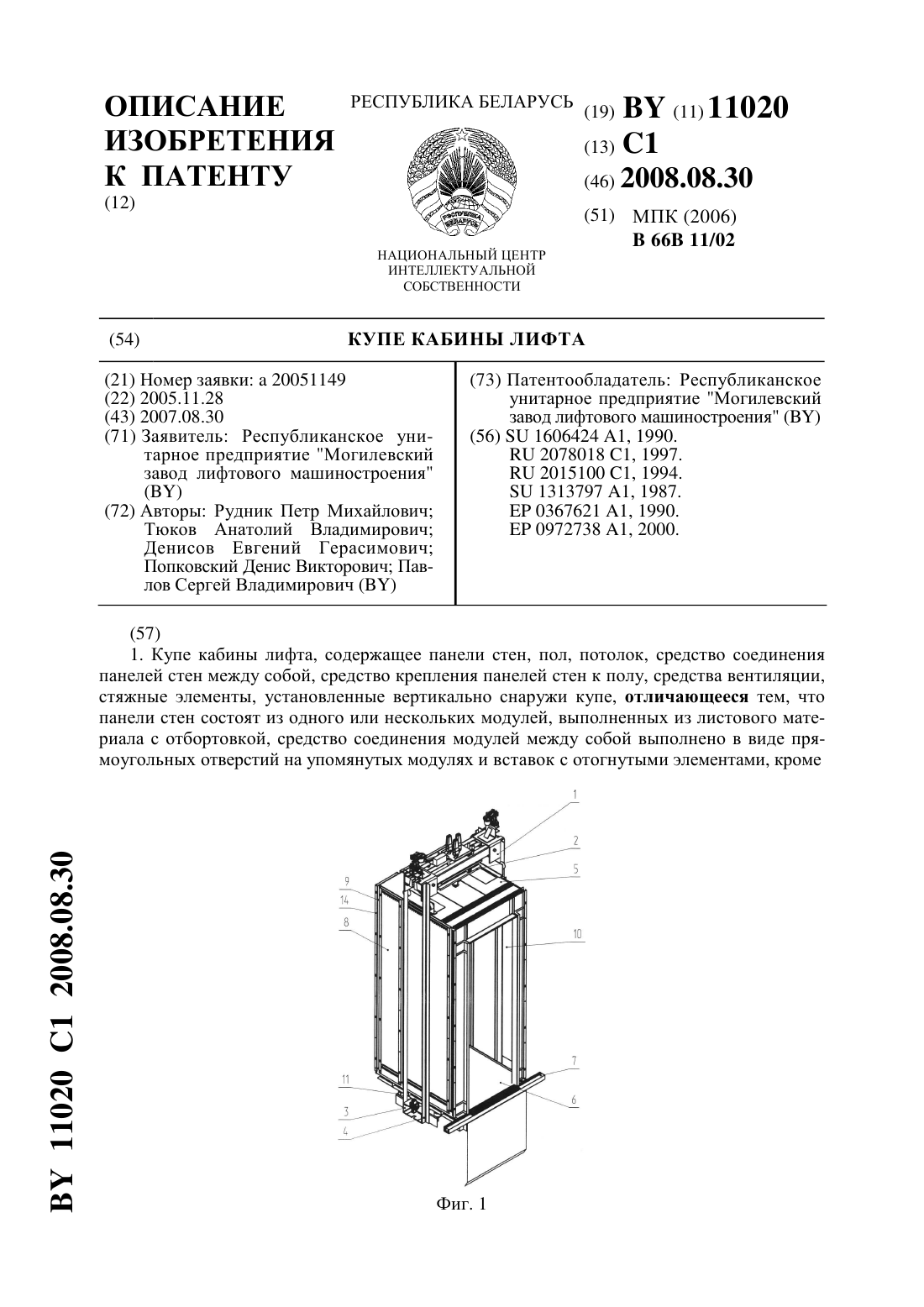
Купе кабины лифта
Номер патента: 11020
Опубликовано: 30.08.2008
Авторы: Денисов Евгений Герасимович, Попковский Денис Викторович, Тюков Анатолий Владимирович, Павлов Сергей Владимирович, Рудник Петр Михайлович
МПК: B66B 11/02
Текст:
...которой в купе кабины лифта, содержащем панели стен, пол, потолок, средство соединения панелей стен между собой, средство крепления панелей стен к полу, средства вентиляции,стяжные элементы, установленные вертикально снаружи купе, панели стен состоят из одного или нескольких модулей, выполненных из листового материала с отбортовкой, средство соединения модулей между собой выполнено в виде прямоугольных отверстий на упомянутых модулях и...
Способ регулирования торможения автопоезда

Номер патента: 9589
Опубликовано: 30.08.2007
Авторы: Цыганков Игорь Иванович, Бочкарев Геннадий Владимирович, Корсаков Владимир Владимирович, Сазонов Игорь Сергеевич, Коваленко Николай Алексеевич, Билык Ольга Валерьевна, Рогожин Владимир Дмитриевич, Красневский Леонид Григорьевич, Ким Валерий Андреевич, Сикорский Вячеслав Владимирович, Василевский Валерий Иванович, Скойбеда Анатолий Тихонович
Метки: способ, автопоезда, регулирования, торможения
Текст:
...сил, действующих на колеса, а отключение/включение тормозных приводов колес осуществляют автоматически в зависимости от знака производных, повторяя эти операции в течение всего времени торможения, согласно изобретению,дополнительно измеряют, обрабатывают и анализируют сигналы, характеризующие силовое взаимодействие между звеньями автопоезда, причем в зависимости от знака силы взаимодействия осуществляют регулирование торможения тягача...
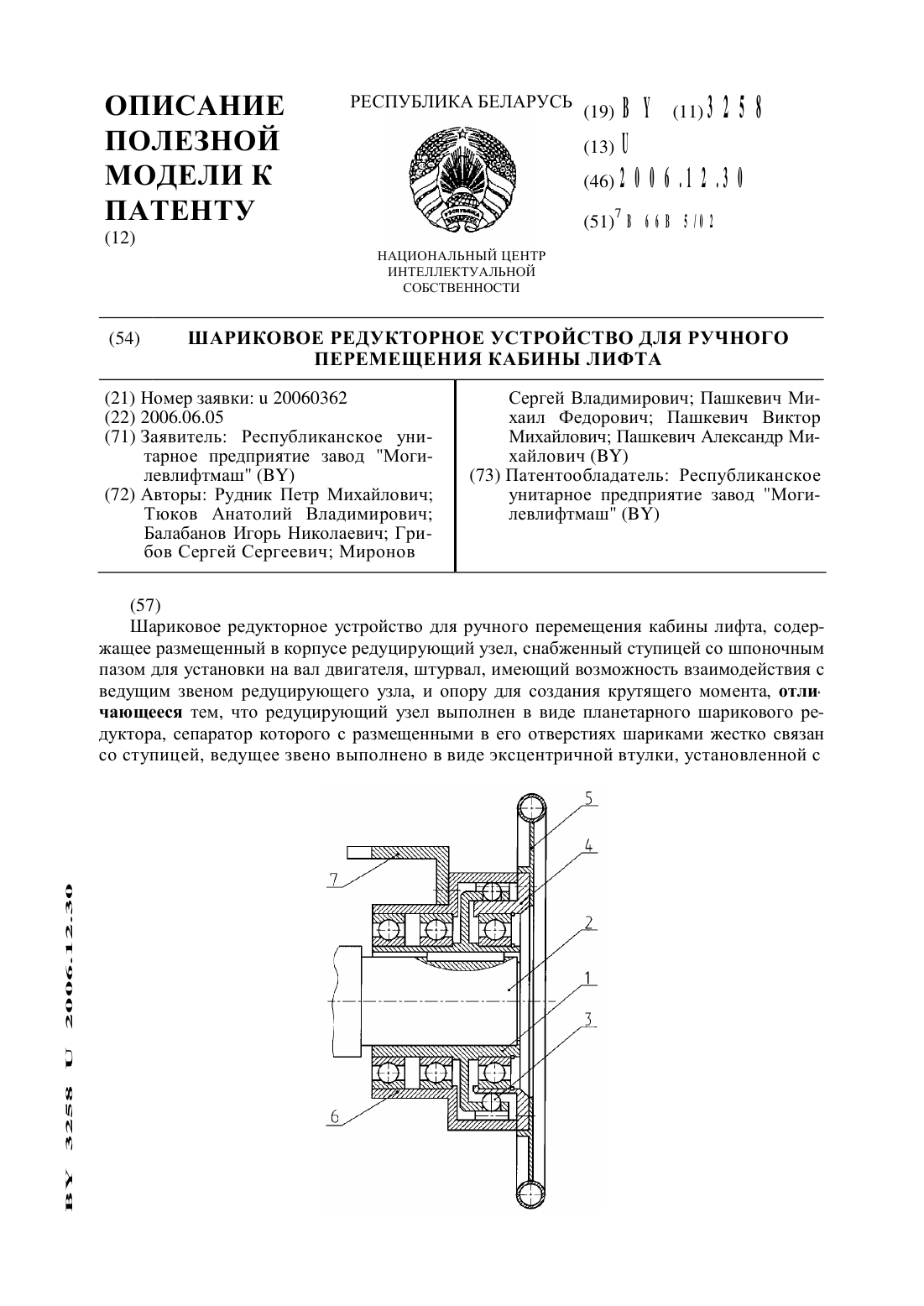
Шариковое редукторное устройство для ручного перемещения кабины лифта
Номер патента: U 3258
Опубликовано: 30.12.2006
Авторы: Пашкевич Михаил Федорович, Миронов Сергей Владимирович, Пашкевич Александр Михайлович, Тюков Анатолий Владимирович, Балабанов Игорь Николаевич, Грибов Сергей Сергеевич, Пашкевич Виктор Михайлович, Рудник Петр Михайлович
МПК: B66B 5/02
Метки: кабины, перемещения, шариковое, лифта, устройство, редукторное, ручного
Текст:
...сепаратор которого с размещенными в его отверстиях шариками жестко связан со ступицей, ведущее звено выполнено в виде эксцентричной втулки, установленной с возможностью свободного вращения относительно ступицы,корпус редуктора также выполнен в виде втулки, установленной с возможностью свободного вращения относительно ступицы, на внутренней стороне корпуса расположен с возможностью взаимодействия с шариками зубчатый венец, а опора выполнена в...
Предыдущий патент: Полка для холодильника
Следующий патент: Способ лечения воспалительной демиелинизирующей полиневропатии
Случайный патент: Пептид и способ его получения