Способ балансировки ротора
Номер патента: 8346
Опубликовано: 30.08.2006
Авторы: Кривомаз Михаил Михайлович, Филонов Игорь Павлович, Политов Иван Анатольевич, Курч Леонид Витальевич


Текст
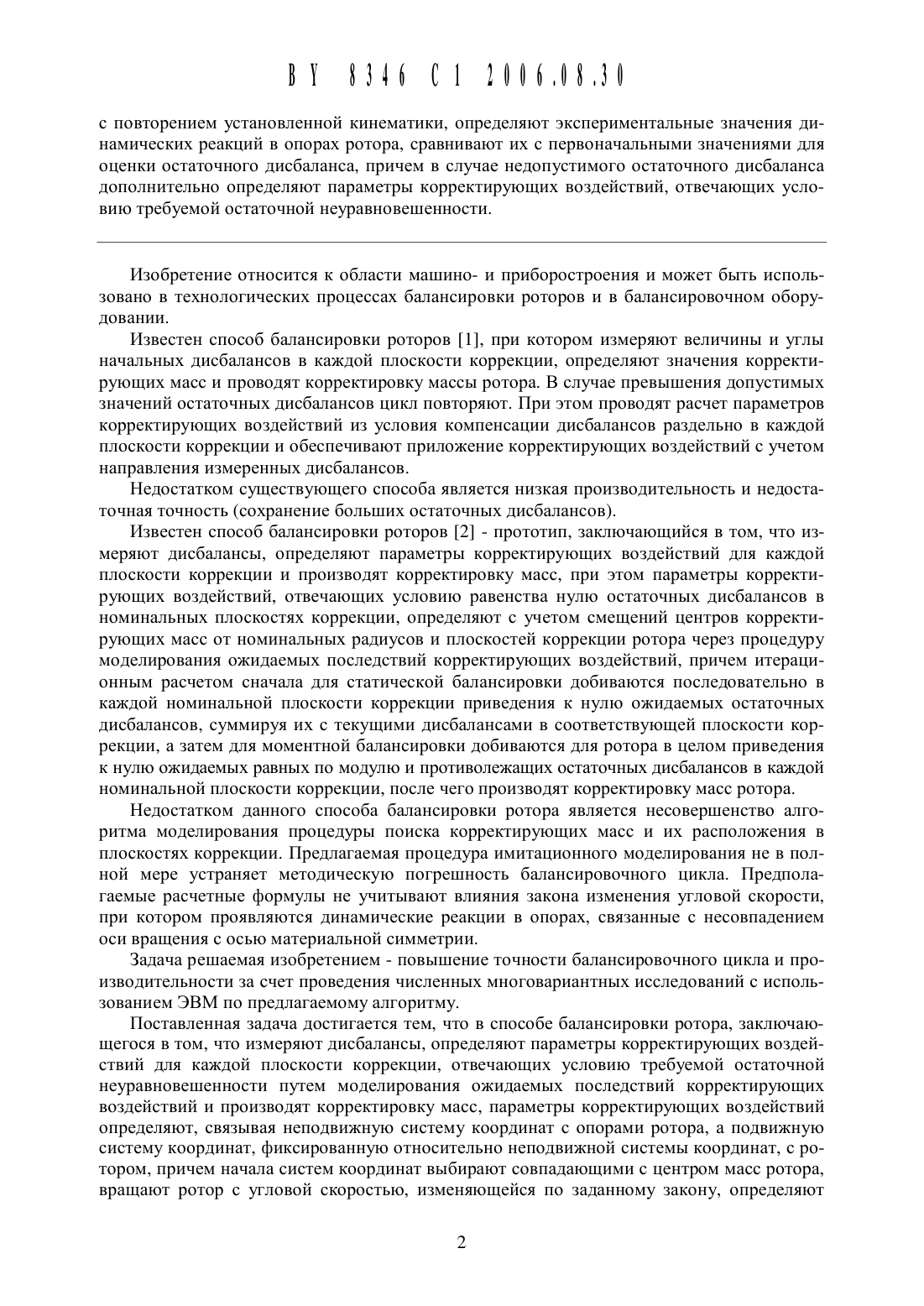
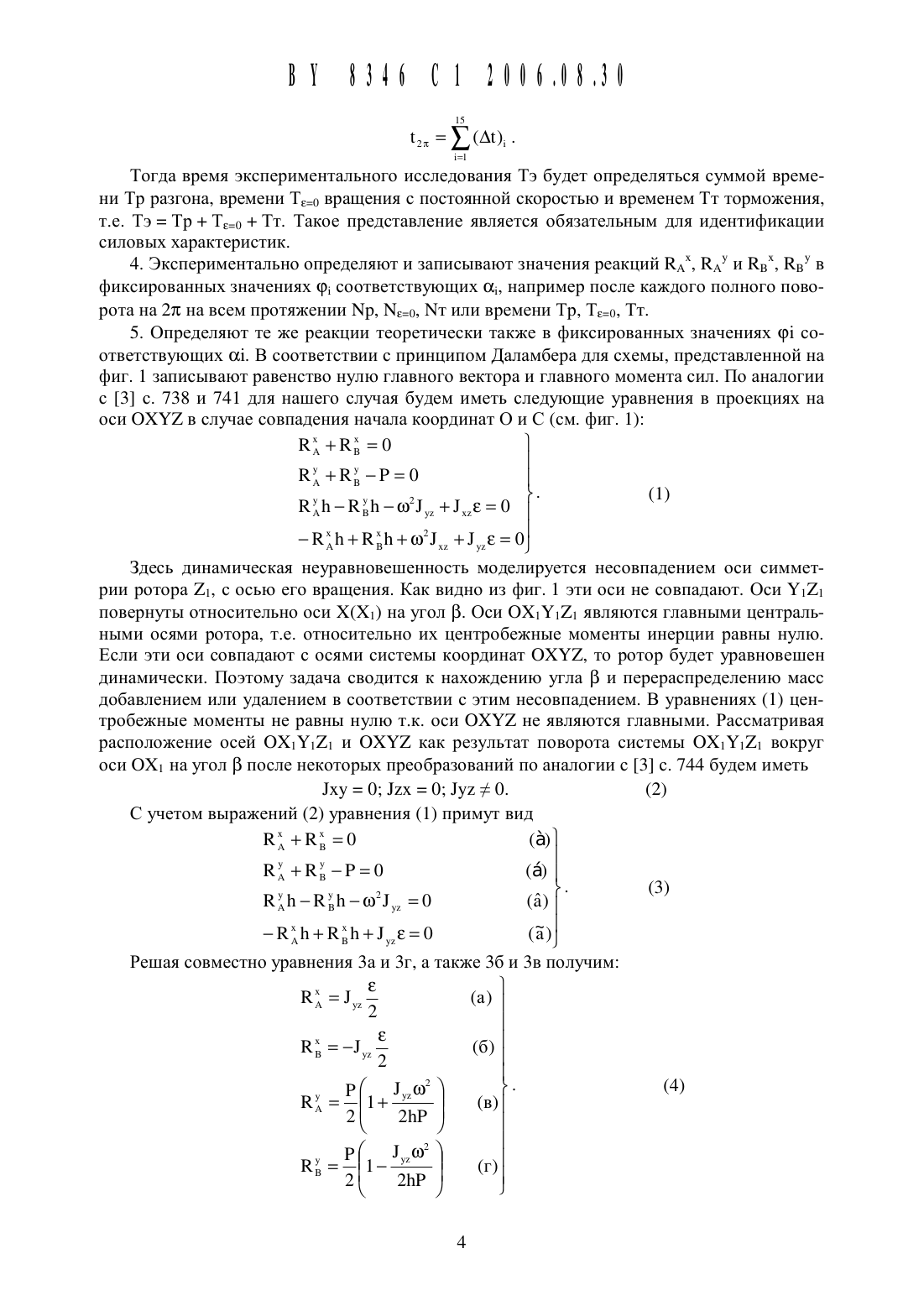
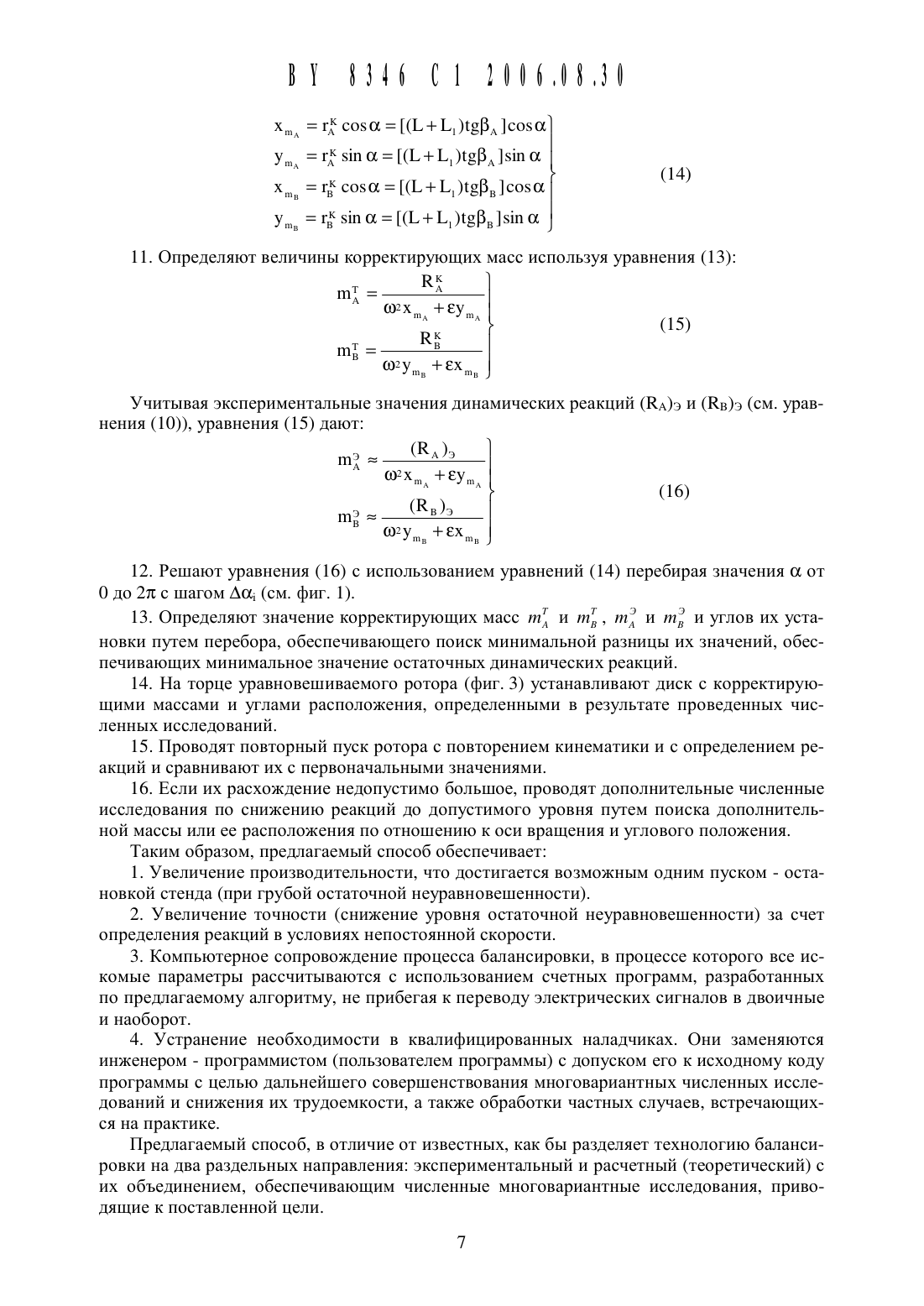
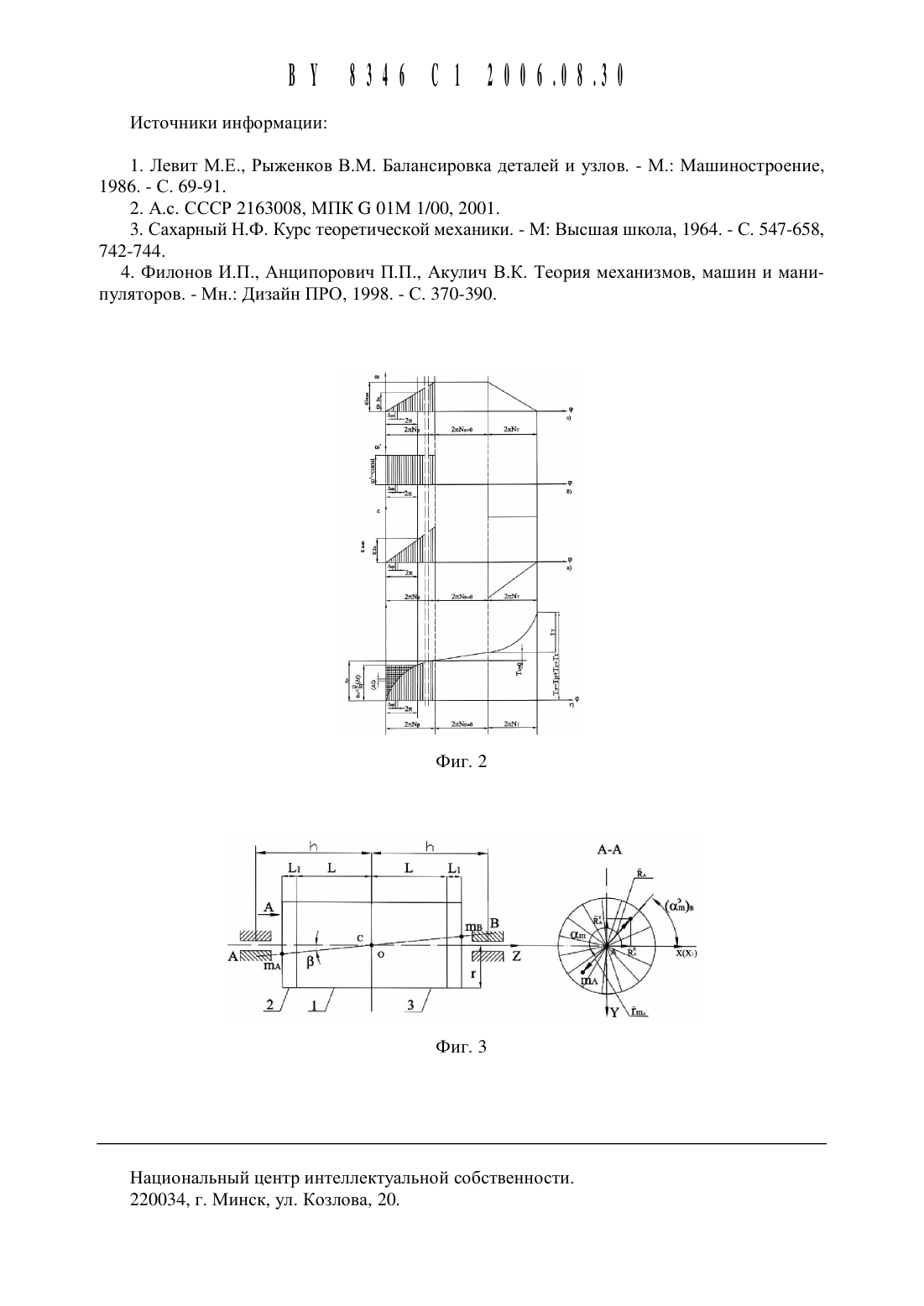
с повторением установленной кинематики, определяют экспериментальные значения динамических реакций в опорах ротора, сравнивают их с первоначальными значениями для оценки остаточного дисбаланса, причем в случае недопустимого остаточного дисбаланса дополнительно определяют параметры корректирующих воздействий, отвечающих условию требуемой остаточной неуравновешенности.Изобретение относится к области машино- и приборостроения и может быть использовано в технологических процессах балансировки роторов и в балансировочном оборудовании.Известен способ балансировки роторов 1, при котором измеряют величины и углы начальных дисбалансов в каждой плоскости коррекции, определяют значения корректирующих масс и проводят корректировку массы ротора. В случае превышения допустимых значений остаточных дисбалансов цикл повторяют. При этом проводят расчет параметров корректирующих воздействий из условия компенсации дисбалансов раздельно в каждой плоскости коррекции и обеспечивают приложение корректирующих воздействий с учетом направления измеренных дисбалансов.Недостатком существующего способа является низкая производительность и недостаточная точность (сохранение больших остаточных дисбалансов).Известен способ балансировки роторов 2 - прототип, заключающийся в том, что измеряют дисбалансы, определяют параметры корректирующих воздействий для каждой плоскости коррекции и производят корректировку масс, при этом параметры корректирующих воздействий, отвечающих условию равенства нулю остаточных дисбалансов в номинальных плоскостях коррекции, определяют с учетом смещений центров корректирующих масс от номинальных радиусов и плоскостей коррекции ротора через процедуру моделирования ожидаемых последствий корректирующих воздействий, причем итерационным расчетом сначала для статической балансировки добиваются последовательно в каждой номинальной плоскости коррекции приведения к нулю ожидаемых остаточных дисбалансов, суммируя их с текущими дисбалансами в соответствующей плоскости коррекции, а затем для моментной балансировки добиваются для ротора в целом приведения к нулю ожидаемых равных по модулю и противолежащих остаточных дисбалансов в каждой номинальной плоскости коррекции, после чего производят корректировку масс ротора.Недостатком данного способа балансировки ротора является несовершенство алгоритма моделирования процедуры поиска корректирующих масс и их расположения в плоскостях коррекции. Предлагаемая процедура имитационного моделирования не в полной мере устраняет методическую погрешность балансировочного цикла. Предполагаемые расчетные формулы не учитывают влияния закона изменения угловой скорости,при котором проявляются динамические реакции в опорах, связанные с несовпадением оси вращения с осью материальной симметрии.Задача решаемая изобретением - повышение точности балансировочного цикла и производительности за счет проведения численных многовариантных исследований с использованием ЭВМ по предлагаемому алгоритму.Поставленная задача достигается тем, что в способе балансировки ротора, заключающегося в том, что измеряют дисбалансы, определяют параметры корректирующих воздействий для каждой плоскости коррекции, отвечающих условию требуемой остаточной неуравновешенности путем моделирования ожидаемых последствий корректирующих воздействий и производят корректировку масс, параметры корректирующих воздействий определяют, связывая неподвижную систему координат с опорами ротора, а подвижную систему координат, фиксированную относительно неподвижной системы координат, с ротором, причем начала систем координат выбирают совпадающими с центром масс ротора,вращают ротор с угловой скоростью, изменяющейся по заданному закону, определяюттеоретические значения динамических реакций в опорах ротора, Моделируя динамическую неуравновещенность, определяют экспериментальные значения динамических реакций в опорах ротора, по полученным теоретическим и экспериментальным значениям динамических реакций опор определяют величину угла между осью вращения ротора и его осью материальной симметрии и рассчитывают величины корректирующих масс с учетом экспериментально определенных динамических реакций и теоретических их значений, рассчитывают координаты установки корректирующих масс, устанавливают рассчитанные корректирующие массы на торцах ротора в соответствующих координатах,проводят повторный пуск ротора с повторением установленной кинематики, определяют экспериментальные значения динамических реакций в опорах ротора, сравнивают их с первоначальными значениями для оценки остаточного дисбаланса, причем в случае недопустимого остаточного дисбаланса дополнительно определяют параметры корректирующих воздействий, отвечающих условию требуемой остаточной неуравновешенности. Сущность предлагаемого способа поясняется чертежами, где на фиг. 1 - изображена схема, поясняющая методику определения динамических реакций, на фиг. 2 а - изображено изменение скорости вращения о) от угла (р поворота ротора, на фиг. 26 - показано изменение аналога скорости 0) от угла (р, на фиг. 2 в - изменение ускорения 8 от угла (р, на фиг. 2 г - показана зависимость изменения угла (р поворота ротора от времени г при заданной кинематике ротора, на фиг. 3 - поясняется схема корректировки масс ротора путем добавления соответствующих корректирующих масс в соответствии с расчетной схемойПредлагаемый алгоритм динамической балансировки ротора следующий1. Выбирают две системы координат неподвижную ОХУ и подвижную О 1 Х 1 У 121,связанную с уравновещиваемым звеном (ротором) (фиг. 1). В данном случае оба начала систем координат совпадают с центром масс цилиндра, т.е. он статически уравновешен. На торце ротора наносят деления на равном угловом расстоянии. Для этого выбирают положение оси Х 1 и, начиная от нее, окружность разбивают на равные углы Аос орд-сед. Например Асс 275/15 36 О/15 24 (фиг. 1).2. Устанавливают ротор радиуса г и длиной 2 Ь на опоры А и В отстоящие друг от друга на расстоянии 211. Считаем при этом, что оси Х и Х 1 совпадают.3. Ротор вращают с переменной угловой скоростью, изменяя ее от нуля до штх по закону 0) о)-(р, где 0) 10)/1(р Аш/Аф. В нащем примере 0) сопзг Ютдх/ШСЫР. Это тангенс угла наклона функции о) к оси угла поворота (р. В данном случае 0) Гр), но не от времени как принято а) Ю). При этом начальное значение а), О должно совпадать с началом отсчета оп от нулевого значения (р, т.е. от оси Х 1(Х). Разгон осуществляют до угла (рр, соответствующего некоторому количеству оборотов Пр, затрачиваемых на разгон,т.е. (рр 2 тс 11 р. Затем ротор вращают с постоянной скоростью, также задавая некоторое количество оборотов ротора Маш с нулевым ускорением е, т.е. (ржет, 2 тс-11 до и, наконец,вращают ротор с замедлением по такому же закону, определяя угловои путь на торможение как (рт 2 тс-Мт, где Мт - количество оборотов ротора, необходимое для изменения соотнощения шт до нуля. Таким образом, в каждом фиксированном значении (р 1 - угла поворота ротора мы можем найти значение (ш в фиксированном угловом положении ротора в соответствии с выполненной ранее разбивкой на Асс, так что 0) шдосд. Подобным образом найдем в каждом фиксированном значении (р 1 и ускорение, также привязанное кзначению он, т.е. 81 Т г щ -0). Другими словами, если щаг Аос (дискрета) будет ра Рвен щагу А(р (дискрете) угла поворота ротора, то 0) 10)/1(р Аш/Аф с привязкой к конкретному значению угла поворота ротора (р, и конкретному ос, с периодичностью 27. Переход от функции 0) Гр) к 8 Гр) показан на фиг. 2 а, 2 б и 2 в. Зависимость времени гот угла (р поворота ротора приведена на фиг. 2 г. При принятом щаге А(р время одного оборота на этапе разгона определяется из соотношенияТогда время экспериментального исследования Тэ будет определяться суммой времени Тр разгона, времени Тдо вращения с постоянной скоростью И временем Тт торможения,т.е. Тэ Тр Т 8 о Тт. Такое представление является обязательным для идентификации силовых характеристик.4. Экспериментально определяют и записывают значения реакций КАХ, КАУ и Квх, Кву в фиксированных значениях (рд соответствующих осд, например после каждого полного поворота на 27 на всем протяжении Мр, Мед), Ыт или времени Тр, Ты), Тт.5. Определяют те же реакции теоретически также в фиксированных значениях р 1 соответствующих ш. В соответствии с принципом Даламбера для схемы, представленной на фиг. 1 записывают равенство нулю главного вектора и главного момента сил. По аналогиис 3 с. 738 и 741 для нащего случая будем иметь следующие уравнения в проекциях на оси ОХУ в случае совпадения начала координат О и С (см. фиг. 1)К К О К К Р О 2 КЬ-КЬ-ш у 2 еО К 11 К 11 ш 2 Х 2 у 2 еО Здесь динамическая неуравновещенность моделируется несовпадением оси симметрии ротора 21, с осью его вращения. Как видно из фиг. 1 эти оси не совпадают. Оси У 121 повернуты относительно оси Х(Х 1) на уголОси ОХ 1 У 121 являются главными централь ными осями ротора, т.е. относительно их центробежные моменты инерции равны нулю. Если эти оси совпадают с осями системы координат ОХУ, то ротор будет уравновешен динамически. Поэтому задача сводится к нахождению угла 3 и перераспределению масс добавлением или удалением в соответствии с этим несовпадением. В уравнениях ( 1) центробежные моменты не равны нулю т.к. оси ОХУ 2 не являются главными. Рассматривая расположение осей ОХ 1 У 121 и ОХУ 2 как результат поворота системы ОХ 1 У 121 вокруг оси ОХ 1 на угол В после некоторых преобразований по аналогии с 3 с. 744 будем иметьху О 12 хО у 2 ЕО. (2) С учетом выражений (2) уравнения ( 1) примут вид К К О ККРО (3) КЬ-КЬ-ФЙУЪ о (а) К 11 К 11 у 280 (5) Рещая совместно уравнения За и Зг, а также 3 б и Зв получим Х 8 КА у 2 5 (а) Х 8 Кв у 2 5 (б) р 1 ж . (4) Ку 1 УЪ 2 211 Р (В) Р 1 о Ку 1 и В 2( 211 Р (Г)Для случая вращения ротора с постоянной угловой скоростью о) сопзг, т.е. 8 О,уравнения (3) примут видК К О ККРО (5) к 11-к 11-о 210 (а) К 11 К 11 О (5) Решение уравнения (5) для случая (1) 001151, т.е. 8 О дает К К О (а) Щ 2 К (1 (б) . (в) Р 1 же Е 1 ЬР (В) Подставляя в уравнения (4) значение центробежного момента инерции 2 2 Луи 5111 23 окончательно получим теоретическое значение реакций в опорах6. Определяют экспериментальные значения реакций (КАХЬ, (КАу)3 и (Квх)3, (Кву)э при вращении ротора с заданным законом изменения его угловой скорости в соответствии с фиг. 2 при фиксированных значениях Афд в соответствии с разбивкой на Аосд. Для каждого из трех участков разгона, вращения с постоянной скоростью и торможения строят графики изменения этих реакций в функции (рд и 011.7. Из уравнений (7) определяют значения углов ЗА и Вв. С этой целью перепищем уравнения (7) в виде
МПК / Метки
Метки: ротора, способ, балансировки
Код ссылки
<a href="https://by.patents.su/8-8346-sposob-balansirovki-rotora.html" rel="bookmark" title="База патентов Беларуси">Способ балансировки ротора</a>
Способ ремонта опорной шейки ротора турбины или турбоэлектрогенератора
Номер патента: 5131
Опубликовано: 30.06.2003
Авторы: Рукавичников Геннадий Аркадьевич, Павлюков Евгений Сергеевич
МПК: B24B 1/00, H02K 15/00
Метки: опорной, способ, ремонта, турбины, ротора, шейки, или, турбоэлектрогенератора
Текст:
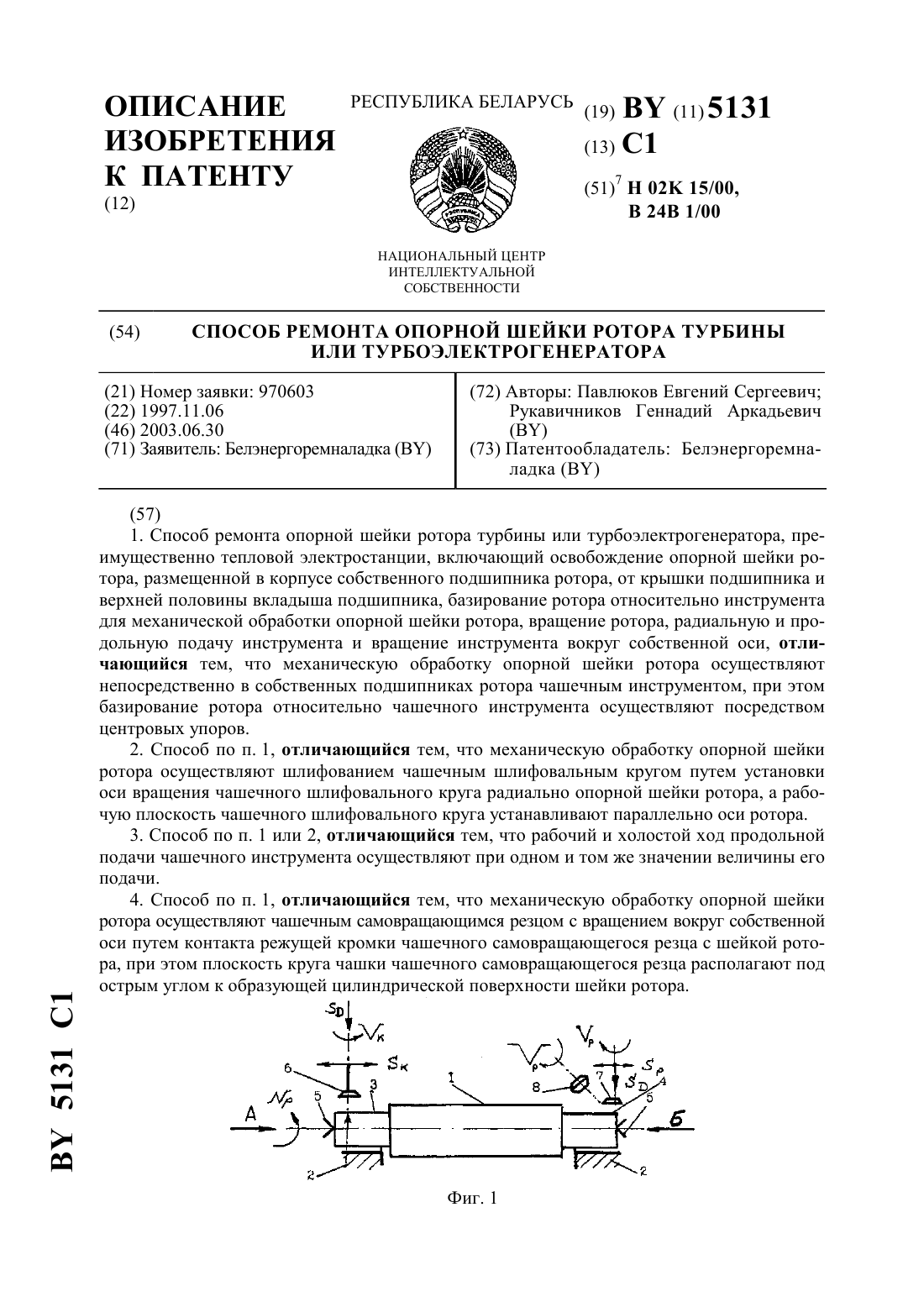
...Механическую обработку опорной шейки ротора в собственных подшипниках ротора осуществляют с осевым подпором с одной или обеих сторон ротора. Сущность изобретения поясняется чертежами, где на фиг. 1 дана общая схема ремонта опорных шеек ротора шлифованием и точением на фиг. 2 - вид по стрелке А на фиг. 1 на фиг. 3 - вид но стрелке Б на фиг. 1. Способ осуществляют следующим образом. Ротор 1, размещенный в собственных подшипниках 2, в зоне...
Устройство для затяжки и балансировки держателя штампа пресса
Номер патента: 980
Опубликовано: 15.12.1995
Автор: Герхард Хайтце
МПК: B21B 1/02
Метки: затяжки, штампа, держателя, устройство, балансировки, пресса
Текст:
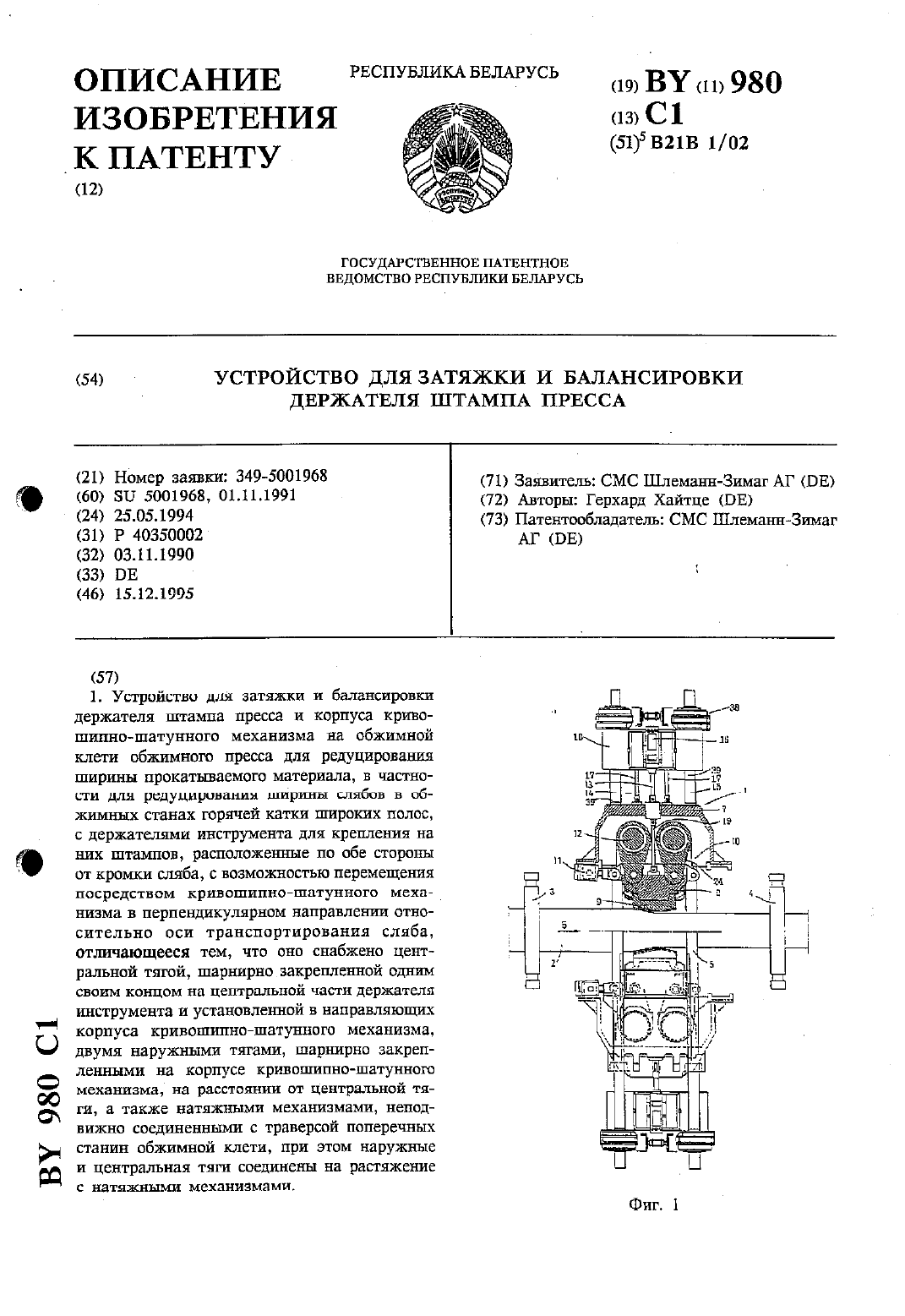
...З известен пресс для редуцирования ширины слябов в станах горячей прокатки с держателями инструмента для крепления на них штамов расположенные по обе стороны от кромки сляба с возможностью перемещения иривошипношатунным механизмом к кромке сляба. Держатель инструмента удерживается двумя-параллельным плунжерами, которые с воз можностью вращения с помощью резьбы направляются н траверсе. Плунамеры с помощью двигателей вращаются расположенной...
Устройство позиционирования ротора вентильного электродвигателя
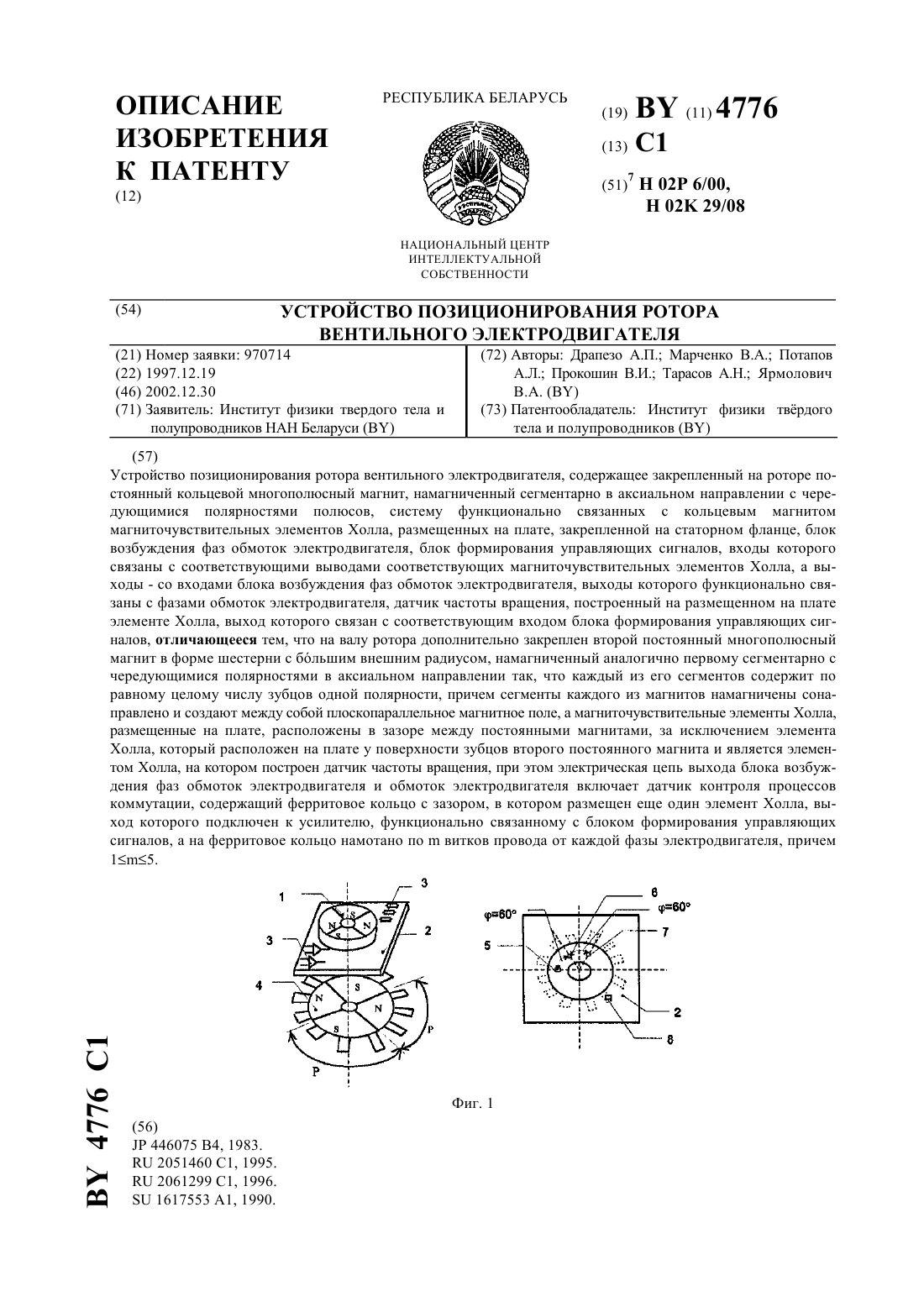
Номер патента: 4776
Опубликовано: 30.12.2002
Авторы: Потапов Александр Львович, Марченко Владимир Алексеевич, Драпезо Александр Петрович, Прокошин Валерий Иванович, Ярмолович Вячеслав Алексеевич, Тарасов Альберт Николаевич
МПК: H02K 29/08, H02P 6/00
Метки: устройство, позиционирования, ротора, электродвигателя, вентильного
Текст:
...фазы электродвигателя, причем 15. Данный технический эффект достигается за счет двух факторов. Во-первых, используются магниты, которые формируют плоскопараллельное магнитное поле в зазоре, не зависящее от смещения элемента Холла в аксиальном направлении, и одновременно, благодаря чередующимся полюсам, формируется узкая зона перехода аксиальной составляющей индукции через нуль. Вторым эффектом, влияющим на точность позиционирования, является...
Устройство для ремонта опорной шейки ротора турбины или турбоэлектрогенератора
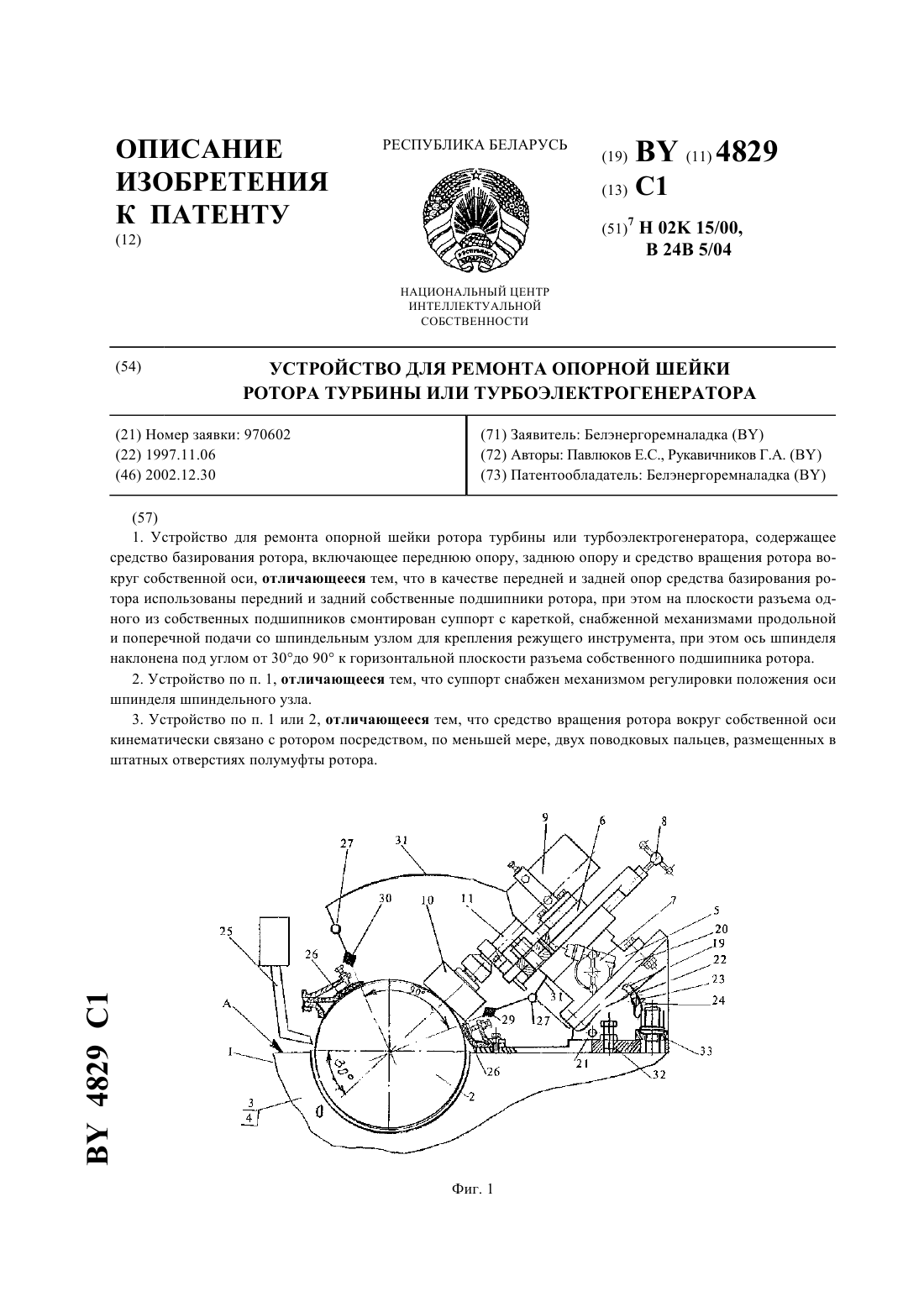
Номер патента: 4829
Опубликовано: 30.12.2002
Авторы: Павлюков Евгений Сергеевич, Рукавичников Геннадий Аркадьевич
МПК: H02K 15/00, B24B 5/04
Метки: опорной, турбоэлектрогенератора, устройство, или, ротора, турбины, шейки, ремонта
Текст:
...22 с фиксатором 23 и угловой шкалой 24. Угол наклона 30-90 суппорта 5 с кареткой 6 выбирают исходя из условий резания и условия движения инструмента при поперечной подаче в направлении плоскости проходящей через ось М- центров ротора 2. В устройстве на плоскости А разъема одного из собственных подшипников 3 ротора 2 оппозитно суппорта 5 размещено средство для смазки 25 обрабатываемой шейки ротора 2. В зоне крепления суппорта 5 и средства для...
Газостатический опорный механизм ротора
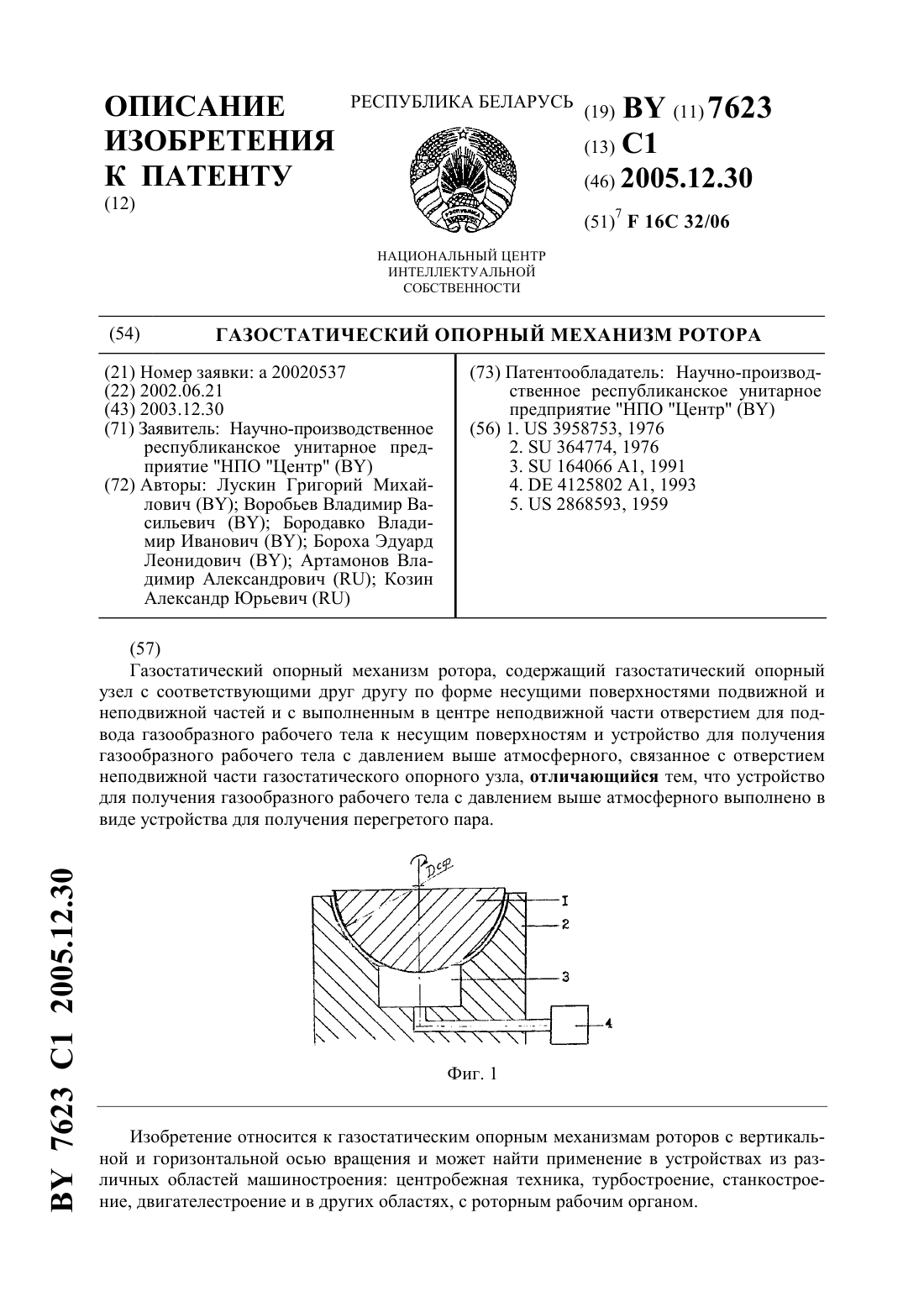
Номер патента: 7623
Опубликовано: 30.12.2005
Авторы: Бороха Эдуард Леонидович, Козин Александр Юрьевич, Артамонов Владимир Александрович, Бородавко Владимир Иванович, Лускин Григорий Михайлович, Воробьев Владимир Васильевич
МПК: F16C 32/06
Метки: механизм, газостатический, ротора, опорный
Текст:
...в газостатическом опорном узле за счет применения газообразного рабочего тела с давлением, значительно превышающим атмосферное. Сущность изобретения заключается в том, что для решения поставленной задачи газостатический опорный механизм ротора, содержащий газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями подвижной и неподвижной частей и с выполненным в центре неподвижной части отверстием для подвода...
Предыдущий патент: Матричный автоэмиссионный катод
Следующий патент: Установка для обработки кристаллов алмаза
Случайный патент: Привод для эскалаторов