Способ испытания управляемости колесных машин
Текст
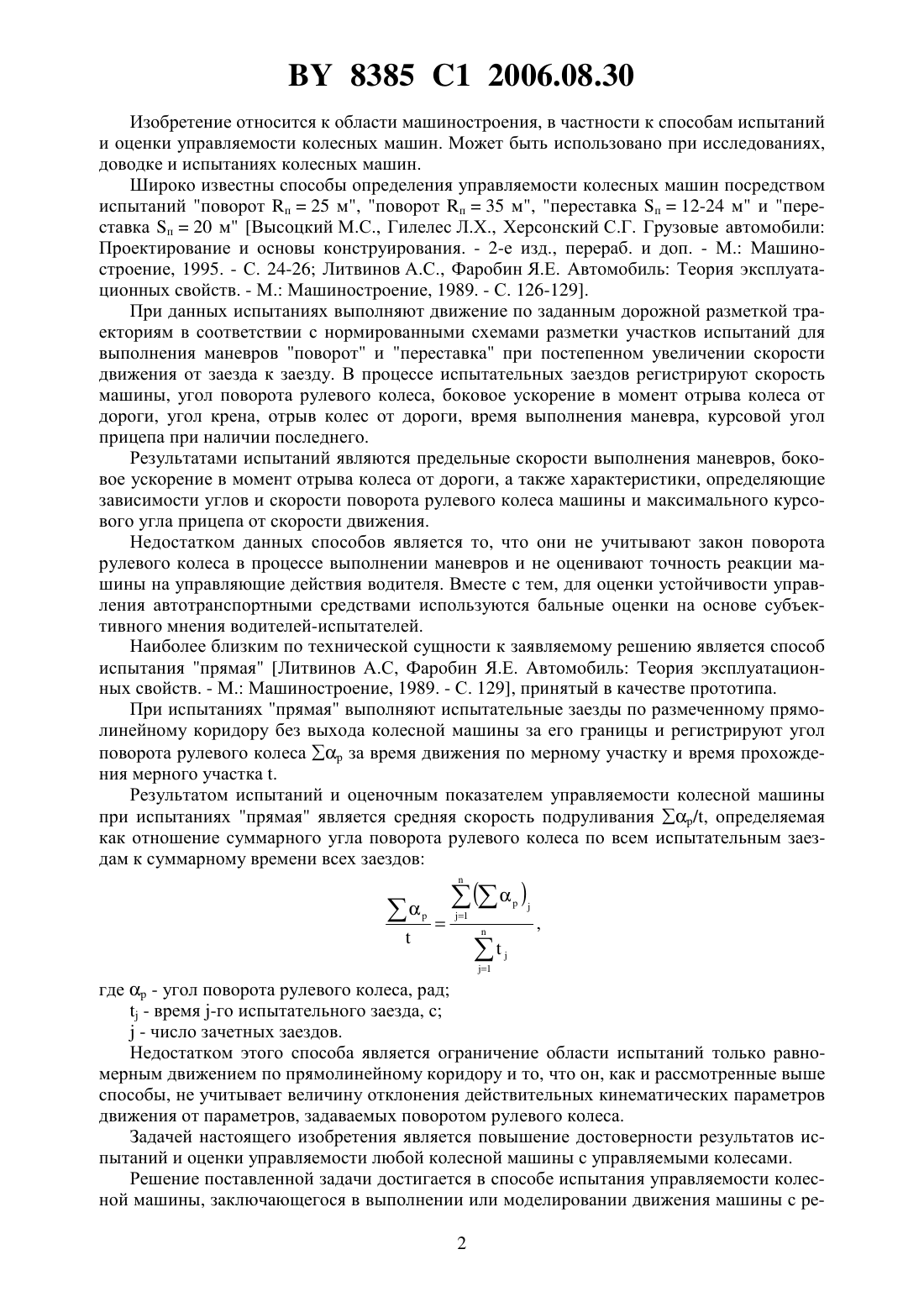
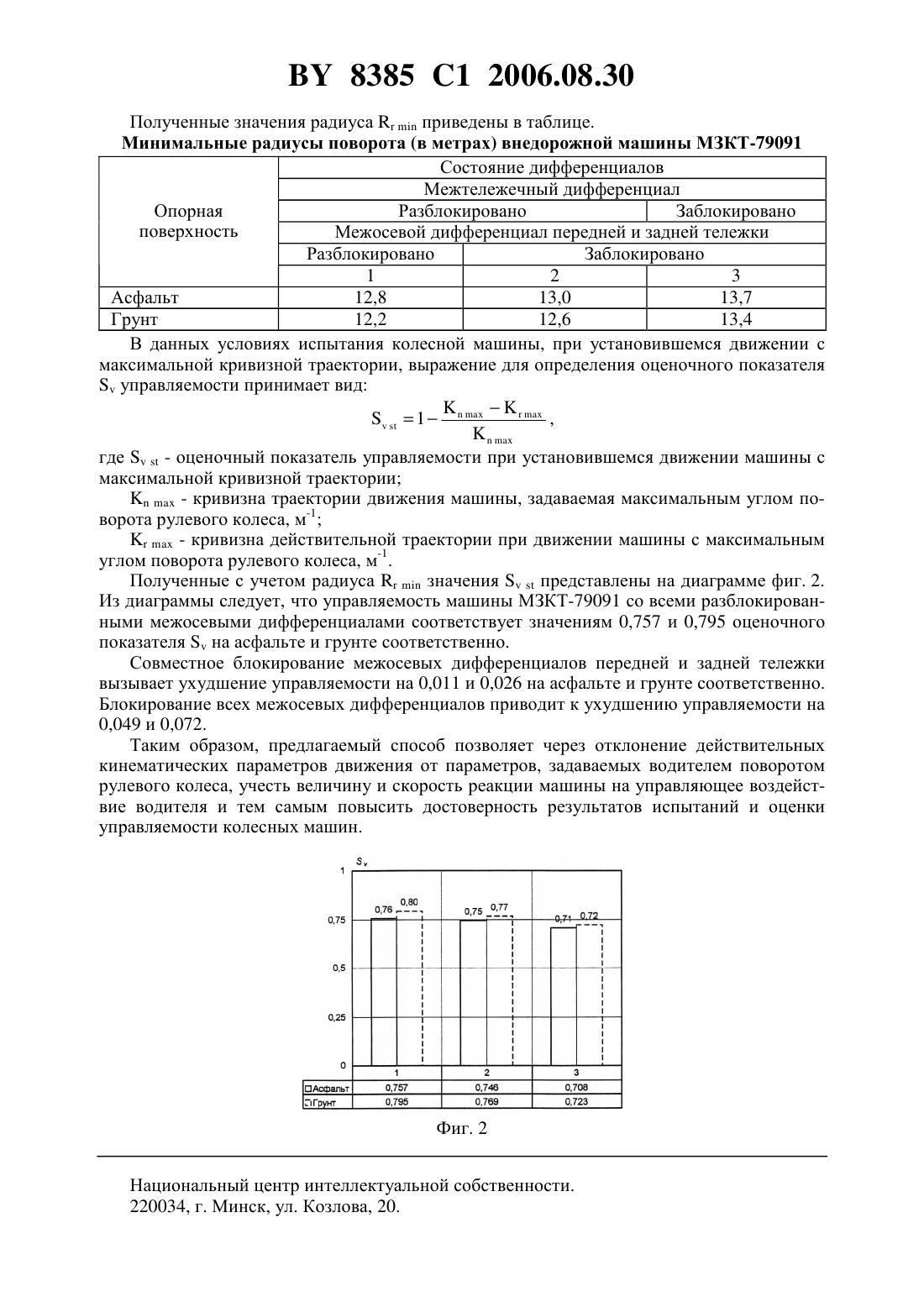
(51)01 17/00 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИСПЫТАНИЯ УПРАВЛЯЕМОСТИ КОЛЕСНЫХ МАШИН(73) Патентообладатель Научно-инженерное республиканское унитарное предприятие Белавтотракторостроение Национальной академии наук Беларуси(71) Заявитель Научно-инженерное республиканское унитарное предприятие Белавтотракторостроение Национальной академии наук Беларуси(72) Автор Дубовик Дмитрий Александрович(57) Способ испытания и оценки управляемости колесных машин, заключающийся в выполнении или моделировании движения с регистрацией кинематических параметров и определении оценочного показателя управляемости, отличающийся тем, что в качестве оценочного показателя управляемостислужит величина отклонения действительной кривизны траектории движения машины от кривизны траектории, задаваемой поворотом рулевого колеса, определяемая по формуле где н - время начала движения по мерному участку, с к - время окончания движения по мерному участку, с- действительная кривизна траектории движения колесной машины, м-1- кривизна траектории движения колесной машины, задаваемая поворотом рулевого колеса, м-1. 8385 1 2006.08.30 Изобретение относится к области машиностроения, в частности к способам испытаний и оценки управляемости колесных машин. Может быть использовано при исследованиях,доводке и испытаниях колесных машин. Широко известны способы определения управляемости колесных машин посредством испытаний поворот п 25 м, поворот п 35 м, переставка п 12-24 м и переставка п 20 м Высоцкий М.С., Гилелес Л.Х., Херсонский С.Г. Грузовые автомобили Проектирование и основы конструирования. - 2-е изд., перераб. и доп. - М. Машиностроение, 1995. - С. 24-26 Литвинов А.С., Фаробин Я.Е. Автомобиль Теория эксплуатационных свойств. - М. Машиностроение, 1989. - С. 126-129. При данных испытаниях выполняют движение по заданным дорожной разметкой траекториям в соответствии с нормированными схемами разметки участков испытаний для выполнения маневров поворот и переставка при постепенном увеличении скорости движения от заезда к заезду. В процессе испытательных заездов регистрируют скорость машины, угол поворота рулевого колеса, боковое ускорение в момент отрыва колеса от дороги, угол крена, отрыв колес от дороги, время выполнения маневра, курсовой угол прицепа при наличии последнего. Результатами испытаний являются предельные скорости выполнения маневров, боковое ускорение в момент отрыва колеса от дороги, а также характеристики, определяющие зависимости углов и скорости поворота рулевого колеса машины и максимального курсового угла прицепа от скорости движения. Недостатком данных способов является то, что они не учитывают закон поворота рулевого колеса в процессе выполнении маневров и не оценивают точность реакции машины на управляющие действия водителя. Вместе с тем, для оценки устойчивости управления автотранспортными средствами используются бальные оценки на основе субъективного мнения водителей-испытателей. Наиболее близким по технической сущности к заявляемому решению является способ испытания прямая Литвинов А.С, Фаробин Я.Е. Автомобиль Теория эксплуатационных свойств. - М. Машиностроение, 1989. - С. 129, принятый в качестве прототипа. При испытаниях прямая выполняют испытательные заезды по размеченному прямолинейному коридору без выхода колесной машины за его границы и регистрируют угол поворота рулевого колесаза время движения по мерному участку и время прохождения мерного участка . Результатом испытаний и оценочным показателем управляемости колесной машины при испытаниях прямая является средняя скорость подруливания /, определяемая как отношение суммарного угла поворота рулевого колеса по всем испытательным заездам к суммарному времени всех заездов где- угол поворота рулевого колеса, рад- время -го испытательного заезда, с- число зачетных заездов. Недостатком этого способа является ограничение области испытаний только равномерным движением по прямолинейному коридору и то, что он, как и рассмотренные выше способы, не учитывает величину отклонения действительных кинематических параметров движения от параметров, задаваемых поворотом рулевого колеса. Задачей настоящего изобретения является повышение достоверности результатов испытаний и оценки управляемости любой колесной машины с управляемыми колесами. Решение поставленной задачи достигается в способе испытания управляемости колесной машины, заключающегося в выполнении или моделировании движения машины с ре 2 8385 1 2006.08.30 гистрацией кинематических параметров (таких как поступательная скорость движения,скорость рыскания, боковое ускорение, угол поворота рулевого колеса и т.п.) и определении оценочного показателя управляемости, причем, согласно изобретению, в качестве оценочного показателя управляемостислужит величина отклонения действительной кривизны траектории движения машины от кривизны траектории, задаваемой поворотом рулевого колеса, определяемая по формуле к где-оценочный показатель управляемости н - время начала движения по мерному участку, с к - время окончания движения по мерному участку, с К - действительная кривизна траектории движения колесной машины, м-1 К - кривизна траектории движения колесной машины, задаваемая поворотом рулевого колеса, м-1. Оценочный показательфункционально основан на кривизне К действительной траектории движения машины и кривизне К, задаваемой водителем при повороте рулевого колеса. Наличием в выражении для вычисления оценочного показателяпараметра К учитываются действия по управлению рулевым колесом при задании желаемой траектории движения машины и характеризуется принятый для оценки управляемости маневр. Абсолютной разностью К-К характеризуется степень отклонения действительной кривизны траектории от кривизны траектории, задаваемой поворотом рулевого колеса. В результате оценочный показательпозволяет количественно оценить величину и скорость реакции испытуемой машины на предпринимаемые во время выполнения испытательного заезда рулевые действия и тем самым повысить достоверность результатов испытаний управляемости колесной машины. Структура показателяобеспечивает ему безразмерность и диапазон количественной оценки от 0 до 1, чем он также выгодно отличается от используемой в прототипе в качестве оценочного показателя средней скорости подруливания / в рад/с (град/с). Причем 0 соответствует случаю, когда машина никоим образом не реагирует на управляющие воздействия на рулевое колесо, сохраняя при этом прямолинейное направление движения. Случай 1 соответствует движению машины с желаемой (задаваемой поворотом рулевого колеса) кривизной траектории. На фиг. 1 приведена графическая зависимость изменения кривизны действительной траектории движения машины и траектории, задаваемой водителем в результате поворота рулевого колеса, при выполнении маневра переставка от времени движения. На фиг. 2 приведена диаграмма оценочного показателяв зависимости от состояния блокирования межосевых дифференциалов внедорожной колесной машины при движении с максимальной кривизной траектории на асфальте и грунте (для иллюстрации примера реализации заявляемого способа). Пример реализации способа. С помощью заявляемого способа оценивалось влияние режимов блокирования-разблокирования межосевых дифференциалов на управляемость внедорожной машины МЗКТ 79091 на асфальте и грунтовой опорной поверхности удовлетворительного состояния. В качестве тестовой траектории движения принималась траектория при движении машины с минимальным радиусом поворота. В ходе испытательных заездов с максимальным углом поворота управляемых колес определялись радиусыповорота машины при различных состояниях блокирования межосевых дифференциалов по формуле. 3 8385 1 2006.08.30 Полученные значения радиусаприведены в таблице. Минимальные радиусы поворота (в метрах) внедорожной машины МЗКТ-79091 Состояние дифференциалов Межтележечный дифференциал Опорная Разблокировано Заблокировано поверхность Межосевой дифференциал передней и задней тележки Разблокировано Заблокировано 1 2 3 Асфальт 12,8 13,0 13,7 Грунт 12,2 12,6 13,4 В данных условиях испытания колесной машины, при установившемся движении с максимальной кривизной траектории, выражение для определения оценочного показателяуправляемости принимает вид,1 где- оценочный показатель управляемости при установившемся движении машины с максимальной кривизной траектории- кривизна траектории движения машины, задаваемая максимальным углом поворота рулевого колеса, м-1- кривизна действительной траектории при движении машины с максимальным углом поворота рулевого колеса, м-1. Полученные с учетом радиусазначенияпредставлены на диаграмме фиг. 2. Из диаграммы следует, что управляемость машины МЗКТ-79091 со всеми разблокированными межосевыми дифференциалами соответствует значениям 0,757 и 0,795 оценочного показателяна асфальте и грунте соответственно. Совместное блокирование межосевых дифференциалов передней и задней тележки вызывает ухудшение управляемости на 0,011 и 0,026 на асфальте и грунте соответственно. Блокирование всех межосевых дифференциалов приводит к ухудшению управляемости на 0,049 и 0,072. Таким образом, предлагаемый способ позволяет через отклонение действительных кинематических параметров движения от параметров, задаваемых водителем поворотом рулевого колеса, учесть величину и скорость реакции машины на управляющее воздействие водителя и тем самым повысить достоверность результатов испытаний и оценки управляемости колесных машин. Фиг. 2 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01M 17/00
Метки: машин, способ, управляемости, колесных, испытания
Код ссылки
<a href="https://by.patents.su/4-8385-sposob-ispytaniya-upravlyaemosti-kolesnyh-mashin.html" rel="bookmark" title="База патентов Беларуси">Способ испытания управляемости колесных машин</a>
Дифференциал свободного хода для колесных машин
Номер патента: U 2436
Опубликовано: 28.02.2006
Авторы: Николаев Юрий Иванович, Дубовик Дмитрий Александрович, Брижанев Владимир Михайлович, Максимов Сергей Михайлович, Высоцкий Михаил Степанович
МПК: F16H 48/20
Метки: хода, свободного, дифференциал, колесных, машин
Текст:
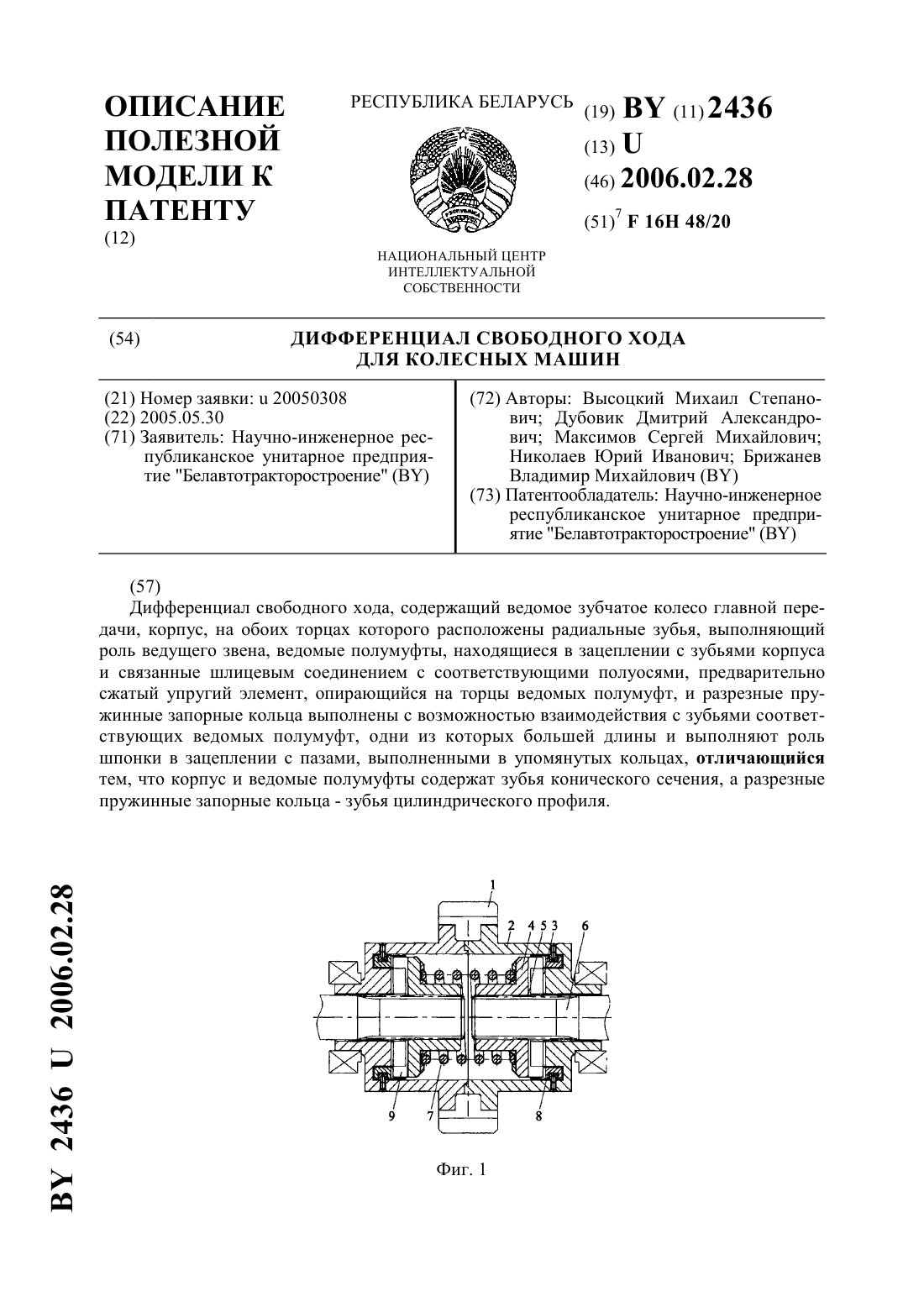
...поставленной задачи достигается тем, что дифференциал свободного хода содержит ведомое зубчатое колесо главной передачи, корпус, на обоих торцах которого расположены радиальные зубья, выполняющий роль ведущего звена, ведомые полумуфты, находящиеся в зацеплении с зубьями корпуса и связанные шлицевым соединением с соответствующими полуосями, предварительно сжатый упругий элемент, опирающийся на торцы ведомых полумуфт, и разрезные пружинные...
Дифференциал свободного хода для колесных машин
Номер патента: U 2608
Опубликовано: 30.04.2006
Авторы: Высоцкий Михаил Степанович, Дубовик Дмитрий Александрович
МПК: F16H 48/20
Метки: хода, дифференциал, свободного, колесных, машин
Текст:
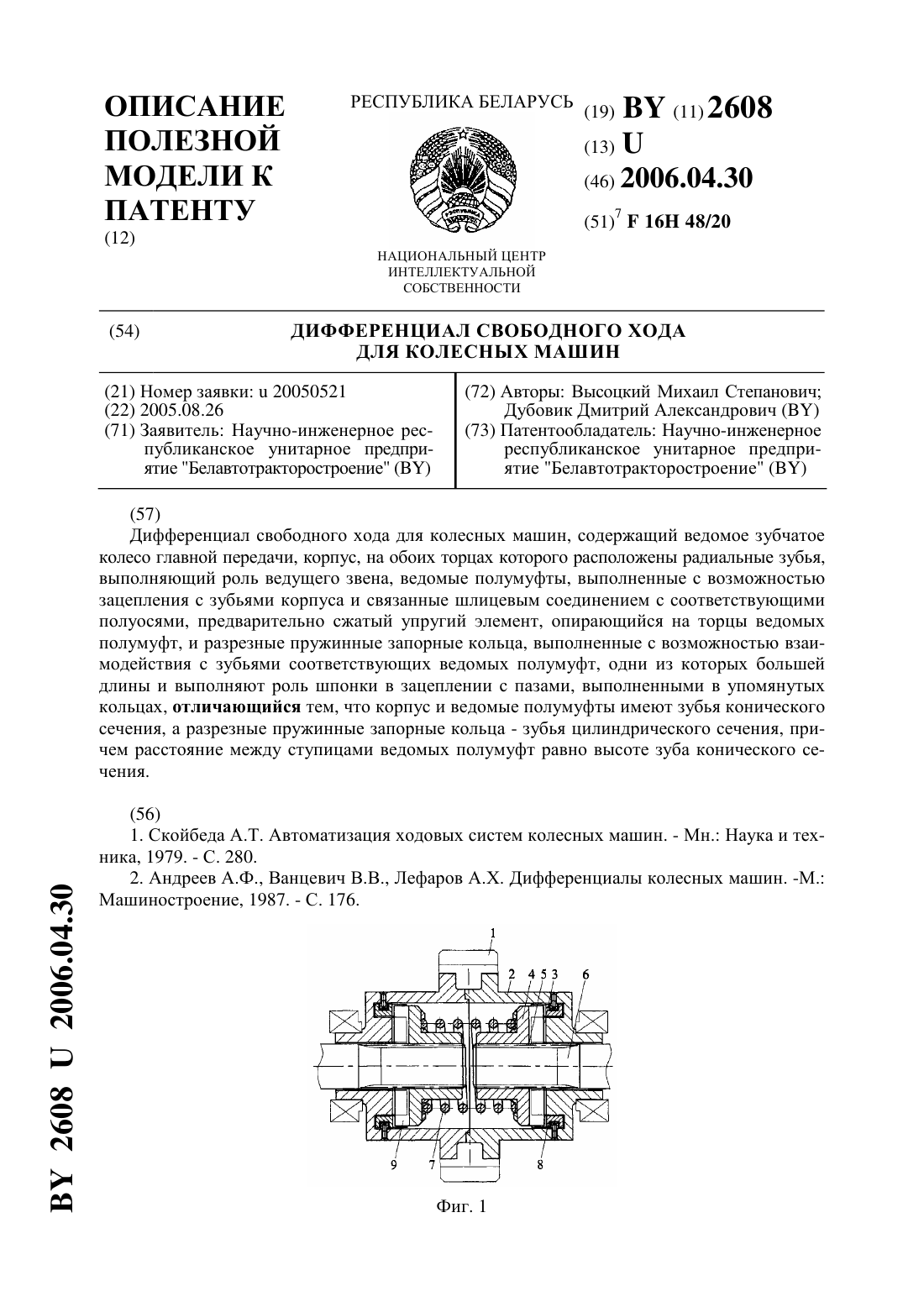
...корпуса и связанные шлицевым соединением с соответствующими полуосями, предварительно сжатый упругий элемент, опирающийся на торцы ведомых полумуфт, и разрезные пружинные запорные кольца, взаимодействующие с зубьями соответствующих ведомых полумуфт, одни из которых большей длины и выполняют роль шпонки в зацеплении с пазами, выполненны 2 26082006.04.30 ми в упомянутых кольцах, причем, согласно техническому решению, взаимодействие корпуса с...
Способ управления движением колесных машин

Номер патента: 5929
Опубликовано: 30.03.2004
Автор: Сазонов Игорь Сергеевич
МПК: B60K 41/00
Метки: движением, машин, управления, способ, колесных
Текст:
...известными методами непрерывную регистрацию сигналов, пропорциональных фактически реализуемым усилиям колесами с опорной поверхностью, нормальных реакций и боковых усилий. Сигналы от датчиков 6 и 7 по каналам 12 поступают в блок обработки информации 13, который производит обработку поступающей информации и формирование сигналов управления для блока управления 14 исполнительными механизмами двигателя 8, главным распределительным...
Стенд для испытания колесных транспортных средств
Номер патента: 1903
Опубликовано: 30.12.1997
Авторы: Фурунжиев Решат Ибраимович, Ким Валерий Андреевич
МПК: G01M 17/00
Метки: средств, колесных, испытания, транспортных, стенд
Текст:
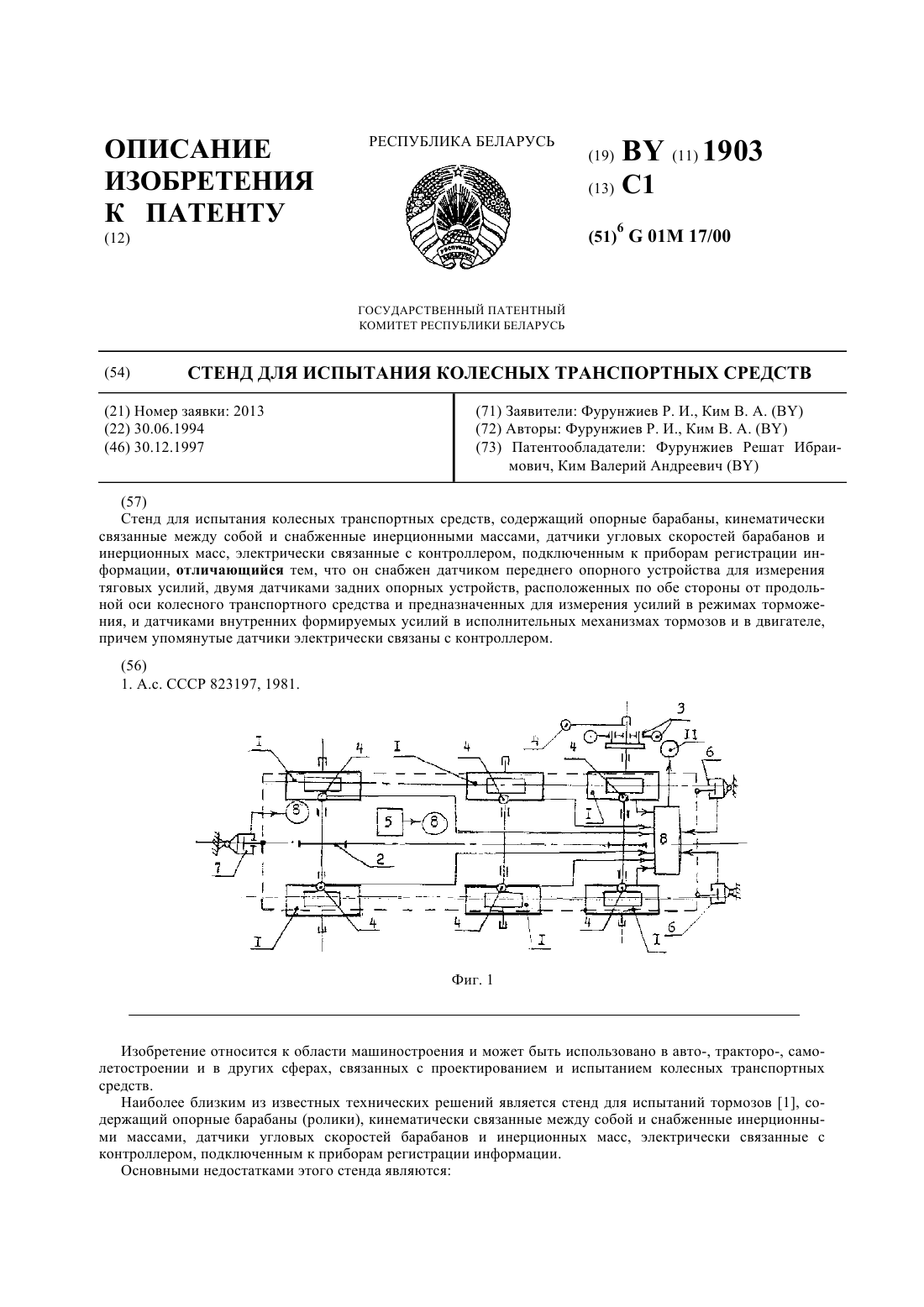
...оси колесного транспортного средства и предназначенных для измерения усилий в режимах торможения, и датчиков внутренних формируемых усилий в исполнительных механизмах тормозов и в двигателе, причем упомянутые датчики электрически связаны с контроллером. Наличие в стенде двух задних опорных и одного переднего датчиков позволяет определять тормозные и тяговые усилия, разворачивающий момент при торможении. Предлагаемый стенд, обладая более...
Стенд для ультразвуковых испытаний колесных пар рельсового подвижного состава

Номер патента: 6017
Опубликовано: 30.03.2004
Авторы: Комаровский Игорь Сергеевич, Дубина Анатолий Владимирович, Бычек Иван Степанович
МПК: G01M 17/10, G01N 29/04, G01M 17/08...
Метки: пар, ультразвуковых, испытаний, колесных, состава, рельсового, стенд, подвижного
Текст:
...является ограниченная функциональная возможность и низкая эффективность при ультразвуковых испытаниях колесных пар. Техническим результатом настоящего изобретения является расширение области применения и повышение эффективности стенда при осуществлении ультразвуковых испытаний колесных пар. Технический результат достигается тем, что в известном стенде, содержащем неподвижное основание с опорами для букс испытываемой колесной пары, привод...
Предыдущий патент: Способ прогнозирования течения послеоперационного панкреатита у онкологических больных
Следующий патент: Групповой вихревой пылеуловитель
Случайный патент: Способ лечения щитовидно-паращитовидной недостаточности