Способ управления движением колесных машин

Текст
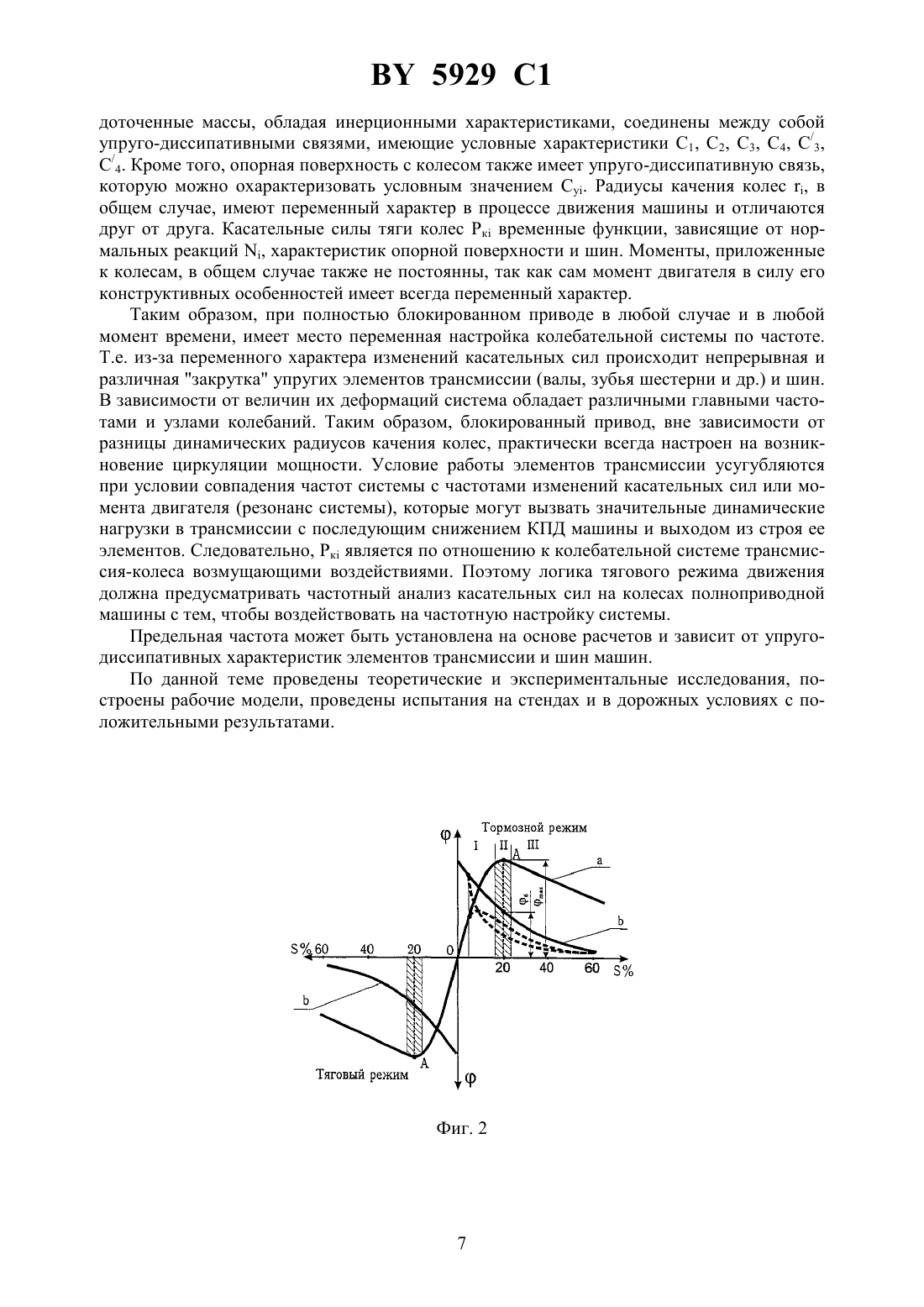
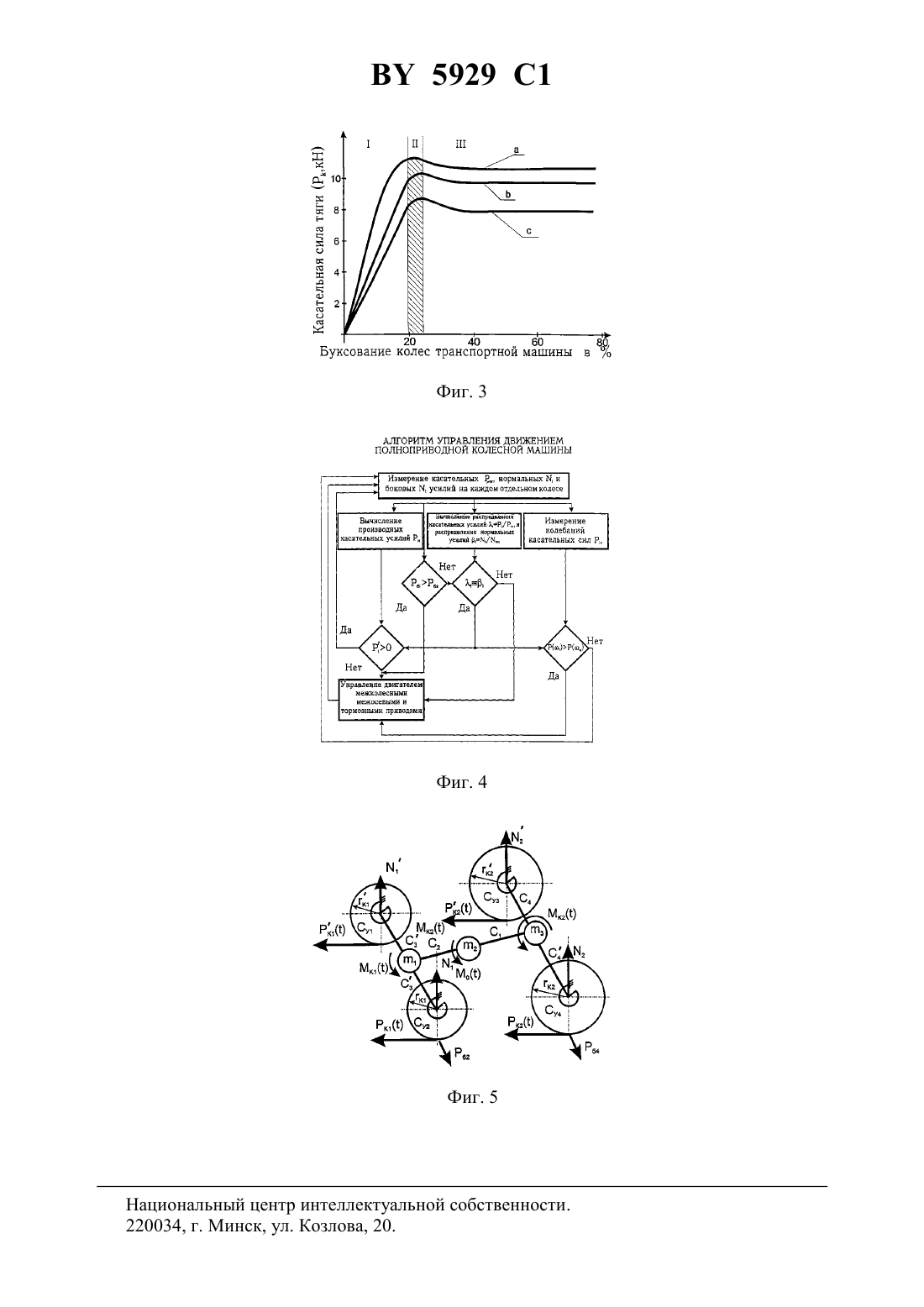
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОЛЕСНЫХ МАШИН(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Автор Сазонов Игорь Сергеевич(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) Способ управления движением колесных машин, заключающийся в измерении усилий, фактически реализуемых колесами машины с опорной поверхностью, обработке и анализе полученных сигналов, регулировании исполнительных механизмов машины в соответствии с проведенным анализом, отличающийся тем, что регулирование осуществляют при возникновении рассогласования между распределением касательных усилий по колесам, бортам или осям машины и соответствующим распределением нормальных усилий, при возникновении боковых усилий на любом из колес или при возникновении автоколебаний касательных усилий на колесах с частотами, близкими к 8-10 Гц. 5929 1 Изобретение относится к области авто-, тракторостроения и может быть использовано при проектировании автоматических систем управления движением полноприводных колесных машин, обеспечивающих им высокие технико-экономические показатели и высокую управляемость и надежность на всех режимах движения. Известен способ регулирования режимов движения машин, основанный на измерении,обработке, анализе сигналов, характеризующих состояние сцепления колес с опорной поверхностью, кинематических параметров движения подрессоренных масс, скорости остова, давления рабочей среды в исполнительных механизмах тормозов и включающий операции автоматического регулирования подачи топлива в двигатель с одновременным притормаживанием колес в транспортном режиме, причем в течение всего времени соответствующих режимов движения происходит повторение этих операций (Автоэлектроника за рубежом // Информационный сборник Вып. 1. - М. 1992. - С. 76-85). Сущность способа заключается в том, что на основе обработки сигналов, характеризующих кинематические параметры колес и остова машины, производят оценку состояния взаимодействия колес с опорной поверхностью. При этом по сигналам угловых скоростей вращения колес и скорости остова машины непрерывно рассчитывают коэффициент сцепления. Для уточнения расчетов при криволинейном движении машины дополнительно измеряют углы поворота управляемых колес. Таким образом, проводят непрерывный расчет и анализ изменения коэффициентов проскальзывания в пятнах контакта колес с опорной поверхностью. При достижении установленных уровней проскальзывания колес производится в зависимости от режима движения либо автоматическое управление тормозным приводом, либо регулирование подачи топлива в двигатель с одновременным притормаживанием ведущих колес машины, находящихся в состоянии скольжения. К недостаткам данного способа следует отнести то, что расчет коэффициентов сцепления колес производят косвенно, через кинематические параметры движения машины. Из-за сложности определения скорости остова машины, погрешностей в измерениях, расчетные значения коэффициентов сцепления являются приближенными и не отражают динамического состояния транспортного средства в реальном времени. Поэтому в изменяющихся дорожных условиях движения машин приближенное определение коэффициентов сцепления колес с опорной поверхностью снижает эффективность предлагаемого способа регулирования. Кроме того, предлагаемый способ не предусматривает формирование сигналов управления полноприводными машинами. Известен также способ автоматического регулирования режима движения полноприводной машины, заключающийся в использовании различного рода конструкций муфт свободного хода и самоблокирующихся дифференциалов (Скойбеда А.Т. Автоматизация ходовых систем колесных машин. - М Наука, 1979. - С. 133-193 Барский И.Б. Конструирование и расчет тракторов. - М. Машиностроение, 1968. - С. 239-242). Сущность способов регулирования заключаются в том, что автоматическую блокировку или разблокировку приводов производят при обнаружении кинематических рассогласований вращения колес машины, что позволяет обеспечить ей более высокие эксплуатационные качества. В данном способе под кинематическим рассогласованием понимается разность угловых скоростей вращения ведущих колес. К недостаткам данного способа относится низкое качество функционирования системы регулирования, объясняемая использованием в качестве сигналов для автоматического регулирования кинематических параметров вращения колес машины, что приводит к погрешности оценки реального состояния колес. Наиболее близким к предлагаемому способу является способ регулирования режимов движения мобильных машин (патент РФ 2125517, 1999), включающий операции измерения, обработки, анализа сигналов, характеризующих состояние взаимодействия колес с опорной поверхностью, скорость остова, нормальных опорных реакций колес, а также операции регулирования исполнительных механизмов, повторение операций производят в течение всего времени неустойчивых режимов движения. 2 5929 1 По этому способу операции регулирования исполнительными механизмами транспортного средства начинают при отрицательных знаках производных боковых реакций колес, фактически реализуемых колесами тормозных моментов, крюковых усилий и превышении нормальными опорными реакциями и их производными заданных значений, а завершают операции регулирования при равенстве нулю или положительных знаках производных указанных параметров и снижении нормальных опорных реакций колес и их производных до заданных значений. Недостатком способа регулирования, принятого за прототип, является то, что способ не может быть использован для полноприводных колесных машин, так как он не определяет алгоритма управления при различных динамических показателях на межосевых и межколесных приводах, поскольку не установлены оценочные критерии управления межосевыми и межколесными приводами. Кроме того, при формировании сигналов управления в известном способе не принимают во внимание специфические особенности полноприводных колесных машин. Таким образом, формирование сигналов управления автоматическими системами межколесных и межосевых приводов с помощью предлагаемого способа не представляется возможным, так как способ решает в основном задачи устойчивости транспортного и тормозного режимов движения транспортного средства с одной ведущей осью. Задачей, решаемой изобретением, является создание способа управления движением полноприводных колесных машин, повышающих их эксплуатационные качества тяговую и тормозную эффективность, устойчивость курсового движения, топливную экономичность. Поставленная задача решается тем, что в способе управления движением колесных машин, заключающийся в измерении усилий, фактически реализуемых колесами машины с опорной поверхностью, обработке и анализе полученных сигналов, регулировании исполнительных механизмов машины в соответствии с проведенным анализом, согласно изобретению, регулирование осуществляют при возникновении рассогласования между распределением касательных усилий по колесам, бортам или осям машины и соответствующим распределением нормальных усилий, при возникновении боковых усилий на любом из колес или при возникновении автоколебаний касательных усилий на колесах с частотами, близкими к 8-10 Гц. Сущность изобретения поясняется чертежами. На фиг. 1 приведена общая схема полноприводной колесной машины. На фиг. 2 приведена диаграмма изменений коэффициентов сцеплений в тормозном и тяговом режимах движения колеса. На фиг. 3 приведены экспериментальные кривые изменения тяговой силы в зависимости от буксования колес колесного трактора. Кривые а,и с соответствуют различным значениям вертикальной нагрузки кривая а -35 , кривая-25 и кривая с -15 . На фиг. 4 изображена схема алгоритма управления транспортным режимом движения полноприводной колесной машины. На фиг. 5 изображена эквивалентная силовая схема привода полноприводной колесной машины. Трансмиссия представлена в виде сосредоточенных масс, соединенных между собой упругими связями. В контакте колес с опорной поверхностью приложены касательные силы тяги, зависящие от времени и характеристик опорной поверхности. Способ управления движением полноприводных колесных машин реализуется на схеме, условно показанной в виде остова 1 машины, ее колес 2, главного тормозного цилиндра 3, тормозных трубопроводов 4, тормозных механизмов 5. На осях колес 2 установлены датчики 6 измерений касательных и нормальных усилий (условно эти датчики обозначены одной позицией) на колеса автомобиля и датчики 7 измерений боковых усилий на колесах автомобиля. На схеме также обозначен двигатель 8, главный (межосевой) распредели 3 5929 1 тельный механизм 9 и вторичные распределительные механизмы 10 (например, межколесные дифференциалы). Поток мощности с вторичного распределительного механизма 10 передается на колесо посредством полуоси 11. Вся информация с датчиков 6 и 7 поступает по каналам 12 в блок обработки информации 13. Далее после переработки информации сигналы поступают в блок управления 14, для выработки управляющего воздействия. Управляющее воздействие по каналам 15, выполненным известными методами, подается в двигатель 8, главный (межосевой) распределительный механизм 9, вторичные распределительные механизмы 10, а также на конкретные тормозные исполнительные механизмы 5. К сосредоточенным массам (фиг. 7), совершающим вращательное движение, приложены моменты 0 - момент, передаваемый двигателем коробке передач Мк 1 - момент на передней оси от раздаточной коробки к 2 - момент на задней оси от раздаточной коробки. Как уже отмечалось, предлагаемый способ основан на измерении силовых факторов,реализуемых колесами машины с опорной поверхностью. На многоосную машину, состоящую изосей 11, межосевых и межколесных распределительных механизмов 9 и 10,действуют касательные силы 1 и 1 соответственно по левому и правому бортам машины, которые измеряются датчиками 6. Кроме того, на каждое колес 2 действуют нормальные усилия, направленные перпендикулярно к опорной поверхности 1 и 1 и боковые усилия, направленные перпендикулярно плоскости колеса Рб и Рб. Двигатель 8 машины передает крутящий момент через коробку передач (не показана) на главный (межосевой) распределительный механизм 9 и вторичные распределительные механизмы 10, а затем к колесам 2 машины, которые реализуют взаимодействие с опорной поверхностью (не показана). Касательные (тяговые, тормозные) Р, реализуемые колесами машины с опорной поверхностью, заставляют перемещаться корпус машины 1. В процессе любого режима движения машины (транспортный, тяговый, тормозной) по любой траектории датчики измерения сил 6 и 7 производят известными методами непрерывную регистрацию сигналов, пропорциональных фактически реализуемым усилиям колесами с опорной поверхностью, нормальных реакций и боковых усилий. Сигналы от датчиков 6 и 7 по каналам 12 поступают в блок обработки информации 13, который производит обработку поступающей информации и формирование сигналов управления для блока управления 14 исполнительными механизмами двигателя 8, главным распределительным механизмом 9 и вторичными распределительными механизмами 10, а также тормозными механизмами 5. Формирование сигналов управления исполнительными механизмами основаны на том, что 1. Предельная величина касательной силы взаимодействия колеса машины с опорной поверхностью ограничена по условиям его сцепления с опорной поверхностью и может характеризоваться отрицательным знаком ее производной. Отрицательный знак производной означает падение величины касательного усилия. Так, согласно общеизвестной диаграмме (фиг. 2), в тяговом и в тормозном режимах работы колеса происходит возрастание и спад коэффициентов сцеплений в продольном направлении. При этом спад коэффициента сцепления наблюдается при значениях коэффициента относительного проскальзывания пятна контакта колеса, превышающих 1822 . На фиг. 2 зона максимального значения коэффициента сцепления соответствует области А. Коэффициент сцепления в боковом направлении колеса имеет максимальное значение только лишь при 0 или близком к нулю. Из характера изменения касательной силы тяги (фиг. 3) видно, что при буксовании колес тяговой машины сила тяги претерпевает также спад при 20 буксования. Следовательно, на основании данных (фиг. 2 и фиг. 3) можно утверждать, характер изменения сил 4 5929 1 в контакте колеса с опорной поверхностью напрямую связан с изменениями коэффициентов сцеплений. Таким образом, анализ производных касательных сил позволяет характеризовать состояние сцепление колеса с опорной поверхностью. На фиг. 3, участки , ,соответствуют нарастанию, максимуму и спаду касательной силы тяги в зависимости от буксования колес транспортной машины. Из анализа кривых, представленных на фиг. 2 и 3, следует, что отрицательная производная силы, реализуемая колесом, характеризует спад коэффициентов сцеплений в продольном и поперечном направлениях. 2. Условие устойчивости движения полноприводной машины, совершающей транспортный режим движения, определяется, прежде всего, равенством суммарных касательных сил по бортам автомобиля (отношение суммарных сил по бортам не должно превышать некоторого установленного значения, близкого к единице, при симметричной загрузке полноприводной машины). Нужно полагать, что при равенстве условий сцепления колеса с дорогой для всех колес распределение касательной нагрузки должно быть пропорционально распределению нормальных усилий между колесами и осями транспортного средства. Следует отметить, что распределение нормальных усилий зависит от загрузки полноприводной машины, и эта загрузка будет меняться от рейса к рейсу. Алгоритм управления транспортным режимом движения представлен на фиг. 4. 3. Управление тяговым режим движения полноприводной колесной машины должно обеспечивать устойчивость ее движения и максимальные тяговые усилия. В тяговом режиме, как было отмечено ранее, максимальное тяговое усилие можно обеспечить максимальным использованием коэффициентов сцеплений колесами машины с опорной поверхностью и минимальной циркулирующей в системе между мостами или осями паразитной мощности, которая существенно снижает КПД машины. Циркуляция паразитной мощности обязательно сопровождается циклическими проскальзываниями одного из колес и возникновением при этом автоколебательного процесса в кинематической цепи приводов. Поэтому возникновение автоколебаний является сигналом к включению регулировочного процесса. Следует отметить, что инерционность системы колесо-датчик-блок сбора информации может не позволить правильно оценить возникновение отрицательного знака производной, поскольку он будет весьма непродолжителен, но будет систематически повторяться. Устранить этот недостаток за счет установки в системе колесо-датчикблок сбора информации малой постоянной времени нельзя, поскольку в этом случае система будет реагировать на каждое случайное значение. Поэтому постоянная времени системы сбора информации должна быть достаточно большой, чтобы отсеивать случайные изменения, поэтому в блоке анализа информации установлен блок анализа колебаний. Экспериментальные исследования показали, что частота таких колебаний находится в диапазоне 8-10 Гц. Повышение тяговых качеств решается путем определения буксования колес по знакам их производных и установленными оптимальными соотношениями касательных сил между осями и колесами машины в каждый момент времени. Способ реализуют следующим образом. На первой стадии, на основе определения величин касательных усилий на колесах и нормальных усилий на колесах, сравнивают распределение нагрузки от нормальных сил и от касательных сил. Если будет обнаружено несоответствие распределения, производят регулирование известными методами. Одновременно с этим анализируют боковые усилия на любом из колес. В случае выявления такой силы также начинают регулировочное воздействие. На второй стадии исследуют изменение касательных усилий по всем колесам и вычисляют производную изменения касательных усилия во времени на каждом колесе. В случае возникновения отрицательного знака производной касательных усилий на любом 5 5929 1 из колес включают систему регулирования тормозного механизма 5 этого колеса 2 в тормозном режиме. В транспортном режиме включают систему регулирования двигателем,главным распределительным механизмом 9 или вторичными распределительными механизмами 10. На третьей стадии производят анализ колебательного характера изменения касательных усилий на колесах и суммарных сил, действующих на мосты машины. При этом формирование сигналов регулирования исполнительными механизмами, как описано выше,производят при обнаружении частот колебаний, близких к 8-10 Гц. Частота колебаний 8-10 Гц определена из характеристик колебательной системы и определяется упругими характеристиками элементов трансмиссии и шин. Исследования показывают, что автоколебания возникают именно в таком диапазоне частот. Сущность предлагаемого способа управления транспортным режимом движения машины поясняется блок-схемой алгоритма, представленной на фиг. 4. По этому алгоритму процедура регулирования происходит следующим образом. После измерения касательных, нормальных и боковых сил определяют их распределение по колесам, осям и бортам. Затем сравнивают распределение нормальных и касательных сил. Если распределения сил между колесами или бортами, или осямине отличаются от распределения нормальных нагрузок между соответствующими опорами либо отсутствуют боковые усилия Рб, либо знаки производных Р/Т больше или равны нулю, то регулирование не проводят. В случае /0 блок управления формирует сигнал управления межколесным приводом. Далее производится определение суммарных сил вующих по бортам автомобиля. Если отношение сил по бортам автомобиля где в числителе и в знаменателе соответствующие суммарные усилия по левому и правому бортам машины превышают наперед распределение нормальных усилий . При Р/б 0 это означает, что колеса пробуксовывают, при этом возникают значительное боковое проскальзывание, поэтому необходимо формировать приоритетный сигнал управления, заключающийся в значительном уменьшении подачи топлива в двигатель. В результате уменьшения частоты вращения коленчатого вала двигателя понижается скорость вращения колес при неизменной скорости движения машины, которая уменьшает боковые реакции, не позволяя колесам бокового скольжения. Такой вид управления исключает воздействие на тормоза, включение которых для понижения скорости корпуса машины могли бы усугубить ситуацию бокового скольжения колес. В то же время включение тормоза допускается как крайний вариант, если предыдущее регулирование не привело к успеху. В последующем цикл управления повторяется. При криволинейном движении Рб 0. В этом случае производится проверка знака производной от боковых реакций. При обнаружении отрицательного знака производных от боковых реакций колес формируется сигнал управления исполнительными механизмами тормозов. В полноприводной машине всегда имеет место замкнутый силовой контур, который служит причиной циркуляции мощности. Для понимания условий возникновения циркуляции мощности рассмотрим простейшую модель полноприводной машины (см. на фиг. 5). В модели трансмиссия машины может быть представлена сосредоточенными массами 1, 2, 3 (массы, приведенные к приводам). В зависимости от характера решаемых задач число масс может быть увеличено или сокращено. Каждое колесо машины и сосре 6 5929 1 доточенные массы, обладая инерционными характеристиками, соединены между собой упруго-диссипативными связями, имеющие условные характеристики С 1, С 2, С 3, С 4, С/3,С/4. Кроме того, опорная поверхность с колесом также имеет упруго-диссипативную связь,которую можно охарактеризовать условным значением . Радиусы качения колес , в общем случае, имеют переменный характер в процессе движения машины и отличаются друг от друга. Касательные силы тяги колес к временные функции, зависящие от нормальных реакций , характеристик опорной поверхности и шин. Моменты, приложенные к колесам, в общем случае также не постоянны, так как сам момент двигателя в силу его конструктивных особенностей имеет всегда переменный характер. Таким образом, при полностью блокированном приводе в любой случае и в любой момент времени, имеет место переменная настройка колебательной системы по частоте. Т.е. из-за переменного характера изменений касательных сил происходит непрерывная и различная закрутка упругих элементов трансмиссии (валы, зубья шестерни и др.) и шин. В зависимости от величин их деформаций система обладает различными главными частотами и узлами колебаний. Таким образом, блокированный привод, вне зависимости от разницы динамических радиусов качения колес, практически всегда настроен на возникновение циркуляции мощности. Условие работы элементов трансмиссии усугубляются при условии совпадения частот системы с частотами изменений касательных сил или момента двигателя (резонанс системы), которые могут вызвать значительные динамические нагрузки в трансмиссии с последующим снижением КПД машины и выходом из строя ее элементов. Следовательно, Рк является по отношению к колебательной системе трансмиссия-колеса возмущающими воздействиями. Поэтому логика тягового режима движения должна предусматривать частотный анализ касательных сил на колесах полноприводной машины с тем, чтобы воздействовать на частотную настройку системы. Предельная частота может быть установлена на основе расчетов и зависит от упругодиссипативных характеристик элементов трансмиссии и шин машин. По данной теме проведены теоретические и экспериментальные исследования, построены рабочие модели, проведены испытания на стендах и в дорожных условиях с положительными результатами. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60K 41/00
Метки: управления, движением, способ, машин, колесных
Код ссылки
<a href="https://by.patents.su/8-5929-sposob-upravleniya-dvizheniem-kolesnyh-mashin.html" rel="bookmark" title="База патентов Беларуси">Способ управления движением колесных машин</a>
Способ Фурунжиева управления движением транспортного средства
Номер патента: 5182
Опубликовано: 30.06.2003
Автор: Фурунжиев Решат Ибраимович
МПК: B60K 41/00
Метки: фурунжиева, способ, транспортного, движением, управления, средства
Текст:
...в качестве выходных(,,,),1 ,(14) где(.)заданные операторы. Можно принять(.)(.)ограничения на сигналы, соответствующие выходным переменным силовых исполнительных механизмов( , ,),1, , ,(15) где,заданные величины 5182 1 ограничения на управляющие сигналы,1 ,(16) где,заданные величины функции предпочтения для составляющих информационную базу системы нечетко определенных параметров критерия качества управления, объекта и системы управления...
Устройство управления движением транспортного средства
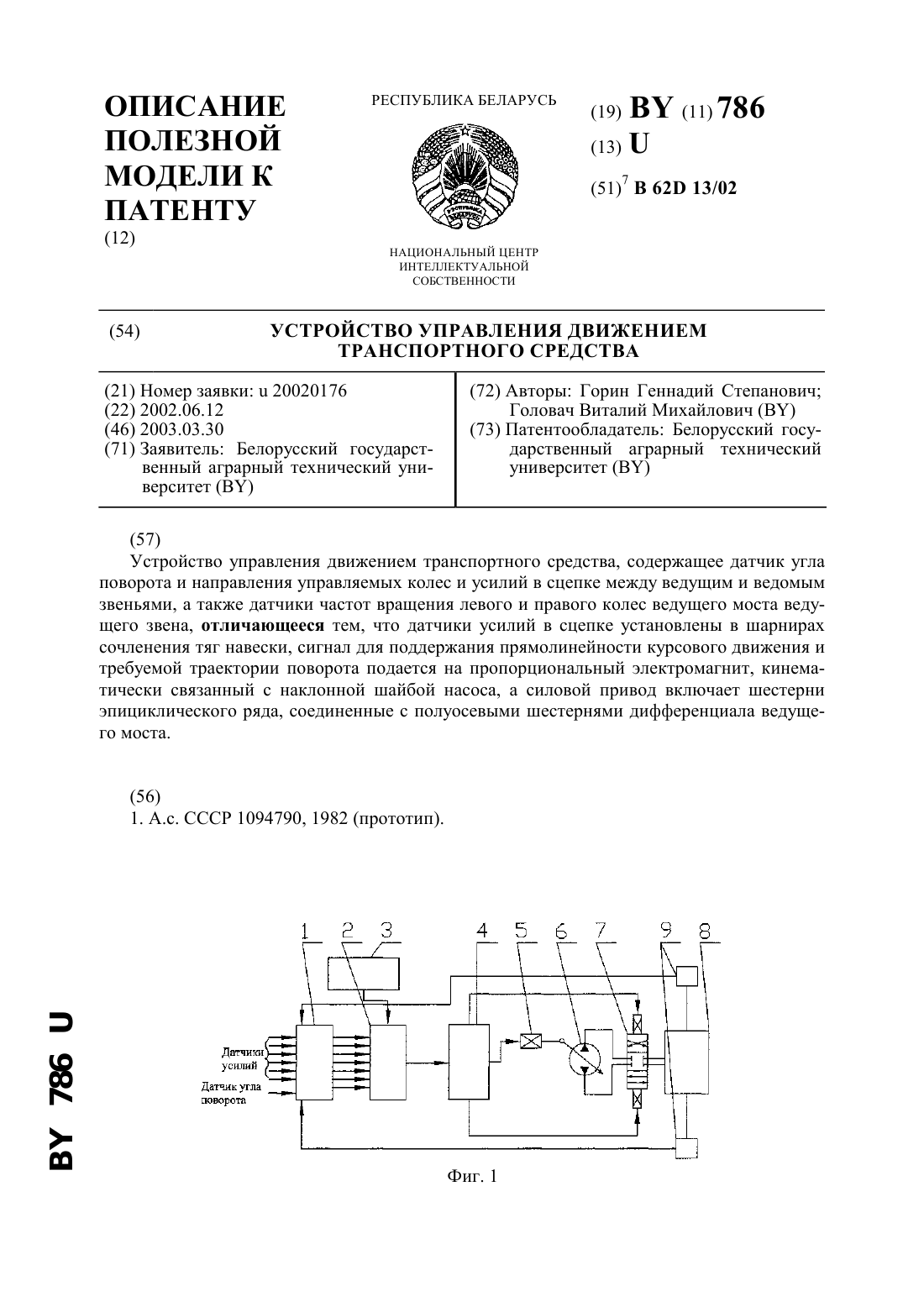
Номер патента: U 786
Опубликовано: 30.03.2003
Авторы: Головач Виталий Михайлович, Горин Геннадий Степанович
МПК: B62D 13/02
Метки: движением, устройство, транспортного, средства, управления
Текст:
...и задних колес при повернутом для уменьшения транспортного коридора путем поддержания необходимого соотношения скоростей вращения внешних и внутренних колес. Названная задача решается устройством управления движением транспортного средства, которое содержит датчик угла поворота и направления управляемых колес и усилий в сцепке между ведущим и ведомым звеньями, а также датчики частот вращения левого и правого колес ведущего моста ведущего...
Способ управления электромеханическим приводом машин
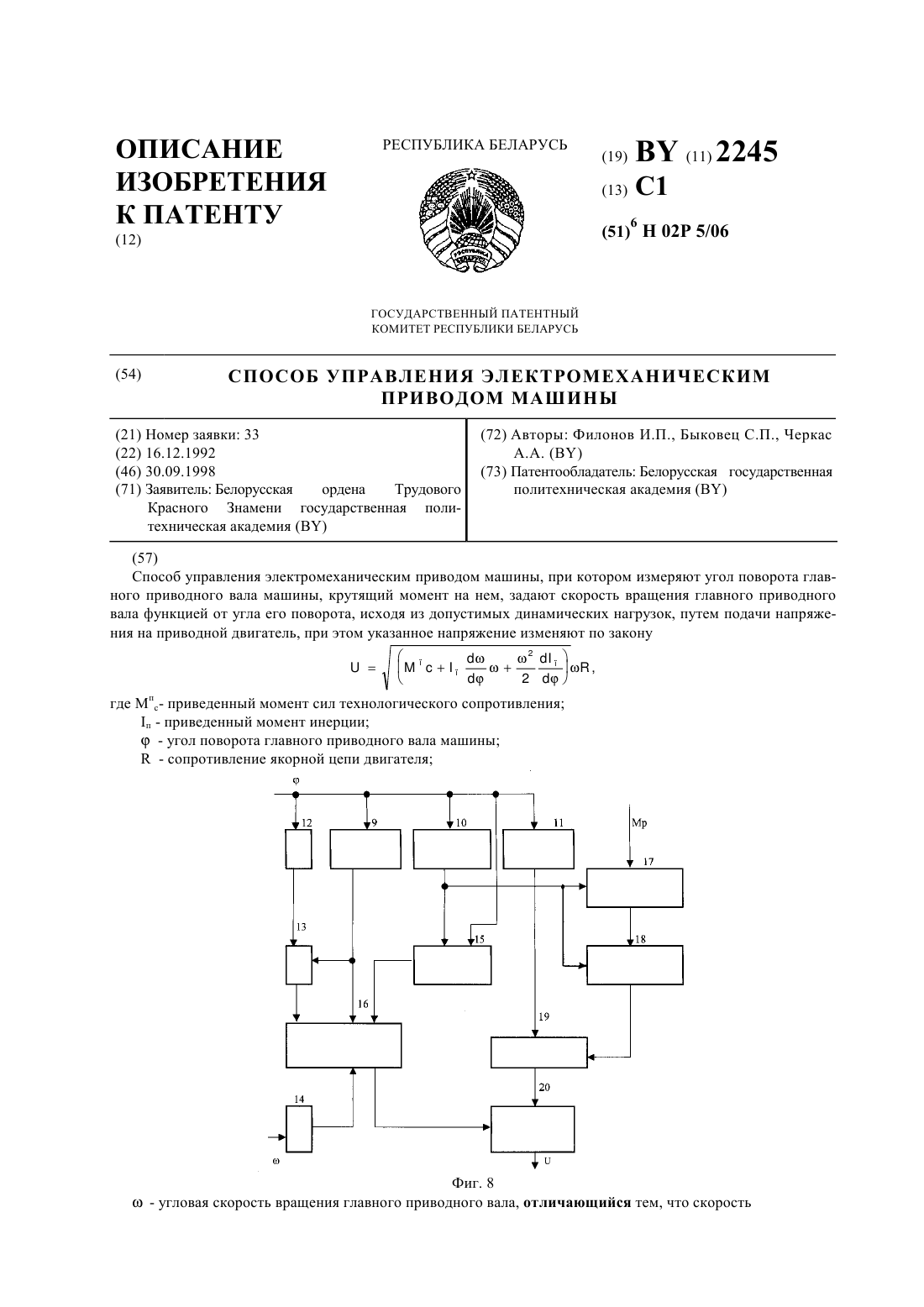
Номер патента: 2245
Опубликовано: 30.09.1998
Авторы: Быкевец С. П., Филонов И. П., Черкас А. А.
МПК: H02P 5/06
Метки: способ, приводом, управления, машин, электромеханическим
Текст:
...скоростиот нуля до ср главного приводного вала машины. 2 и, определяющие суммарное значение привеНа фигуре 5 представлены зависимости,2 денного моментадвижущих сил в функции углаповорота главного приводного вала машины. На фи гуре 6 приведена зависимость, полученная как сумма составляющих, изображенных на фигуре 5. На фиг. 7 представлена структурная схема системы управления, включающая вычислитель 1, регулятор 2,двигатель 3, датчика 4...
Устройство оценки работы оператора в системе управления воздушным движением
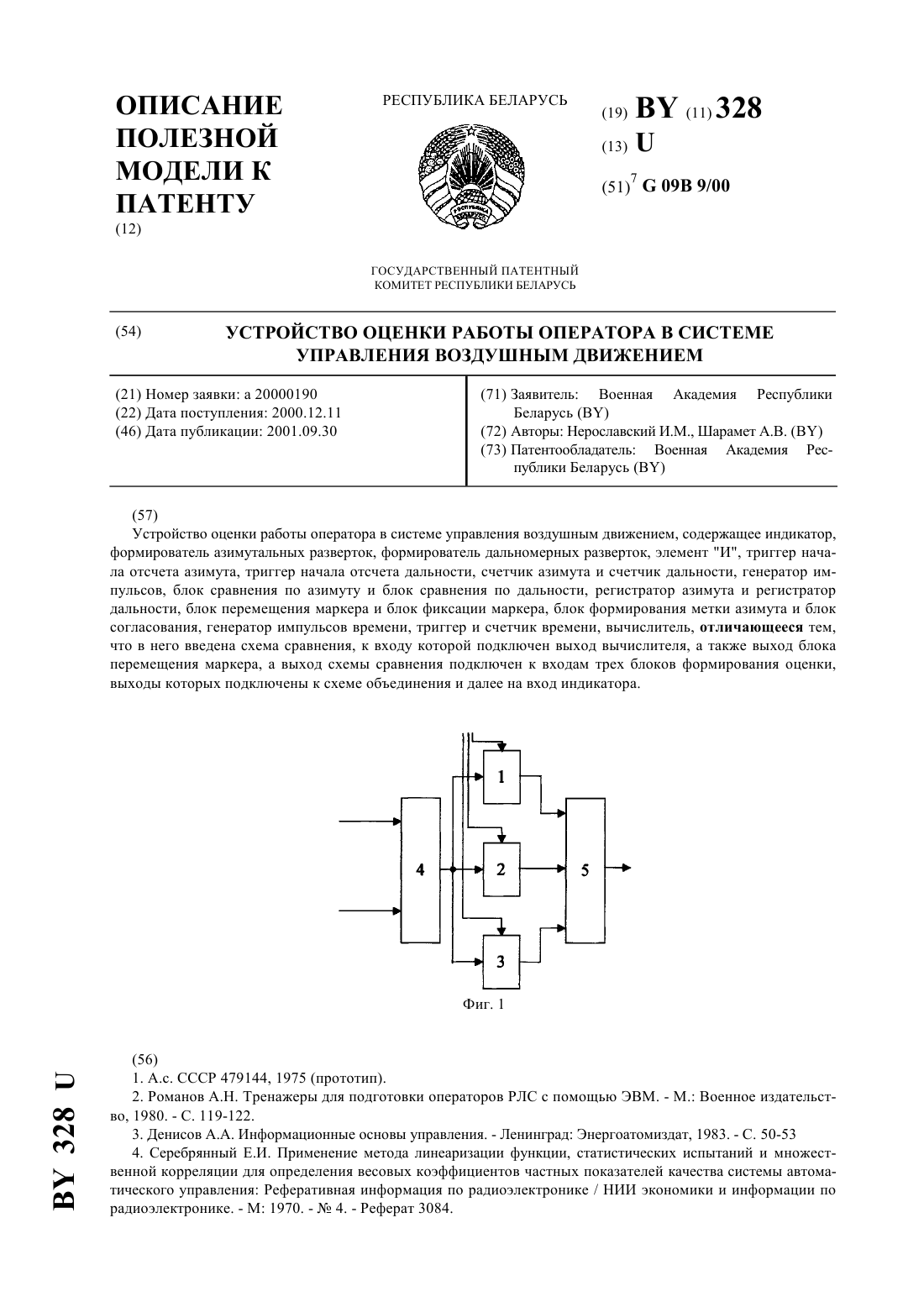
Номер патента: U 328
Опубликовано: 30.09.2001
Авторы: Шарамет Андрей Владимирович, Нерославский Игорь Моисеевич
МПК: G09B 9/00
Метки: оператора, воздушным, управления, устройство, оценки, системе, работы, движением
Текст:
...от нее, а так же для количественной оценки результатов работы оператора. Задача устройства - расширение функциональных возможностей по подготовке и обучению операторов наведения и операторов работающих в системе управления воздушным движением. Техническим результатом предлагаемого устройства является повышение точности наведения, а также уровня безопасности систем человек - машина за счет снижения величины ошибки отклонения цели от...
Стенд для испытания колесных транспортных средств
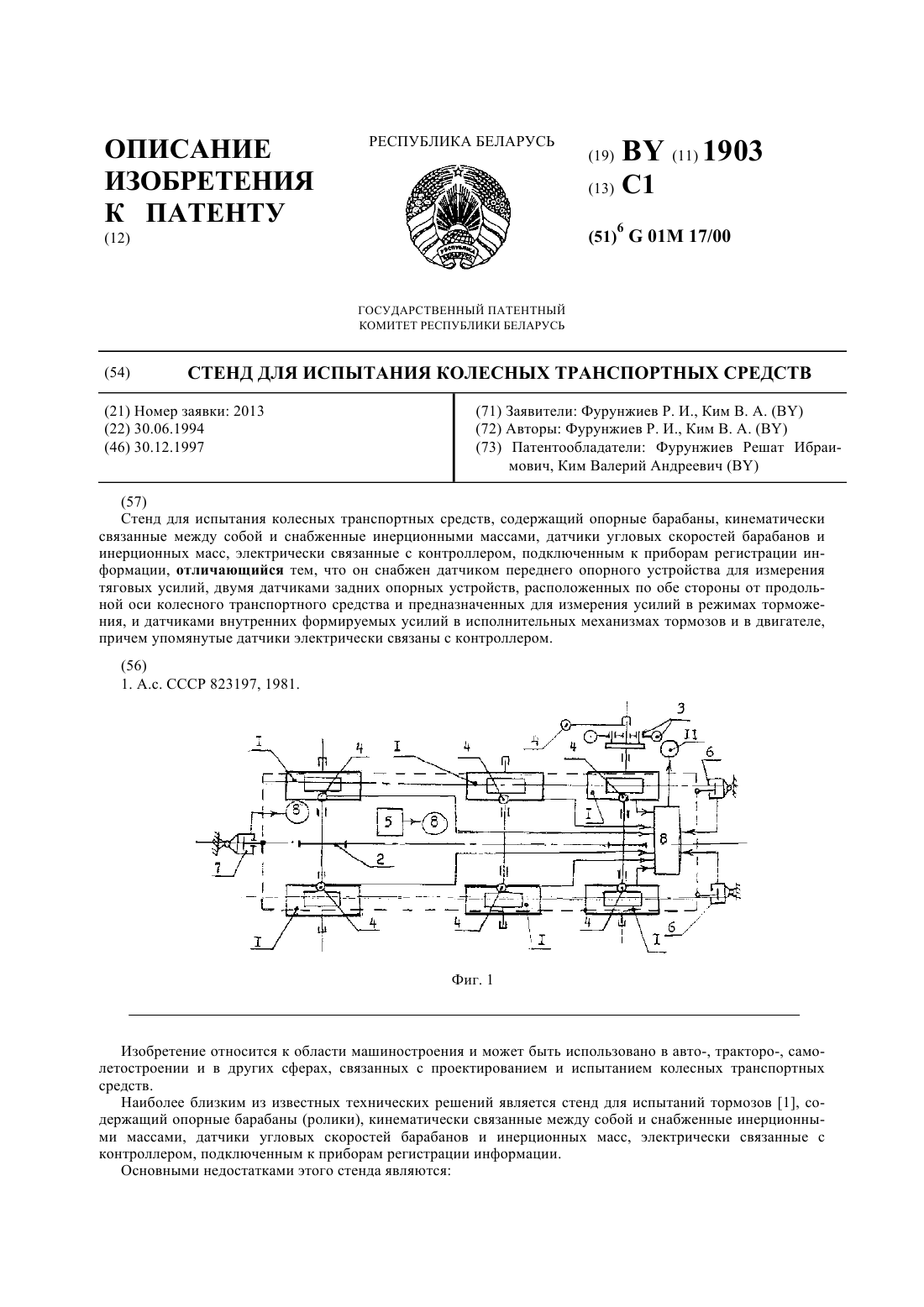
Номер патента: 1903
Опубликовано: 30.12.1997
Авторы: Ким Валерий Андреевич, Фурунжиев Решат Ибраимович
МПК: G01M 17/00
Метки: колесных, испытания, транспортных, стенд, средств
Текст:
...оси колесного транспортного средства и предназначенных для измерения усилий в режимах торможения, и датчиков внутренних формируемых усилий в исполнительных механизмах тормозов и в двигателе, причем упомянутые датчики электрически связаны с контроллером. Наличие в стенде двух задних опорных и одного переднего датчиков позволяет определять тормозные и тяговые усилия, разворачивающий момент при торможении. Предлагаемый стенд, обладая более...
Предыдущий патент: Штамм гриба Mortierella alpina Peyronel БС-2 для производства полиненасыщенных высших жирных кислот и их производных
Следующий патент: Способ рентгенологической диагностики деформирующего остеоартроза и ревматоидного артрита коленного сустава
Случайный патент: Способ получения производного [3Н]-имидазо-[5,1-а]-1,2,3,5-тетразин-4-она