Система управления положением корпуса гусеничной машины
Номер патента: U 1739
Опубликовано: 30.12.2004
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
Текст
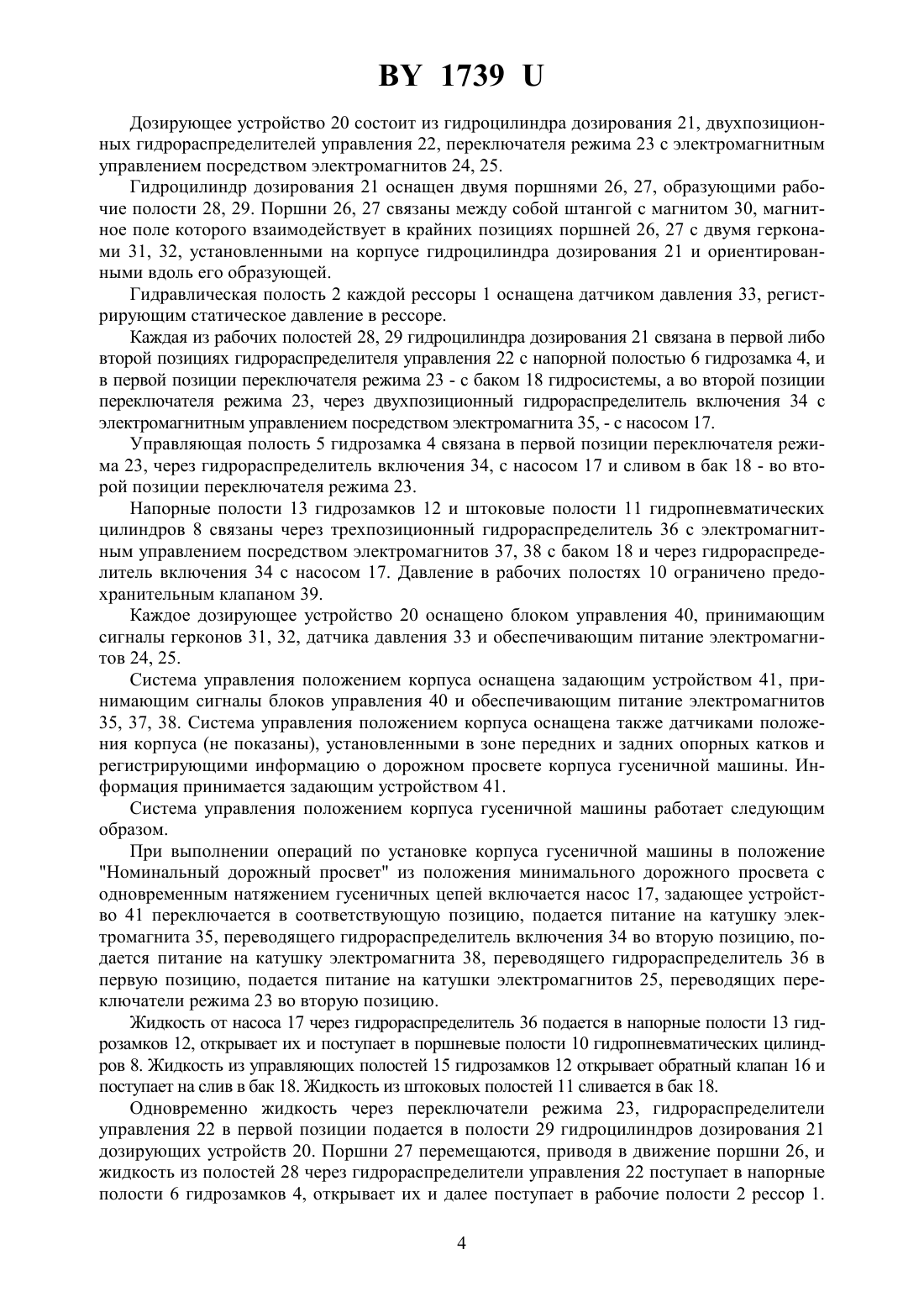
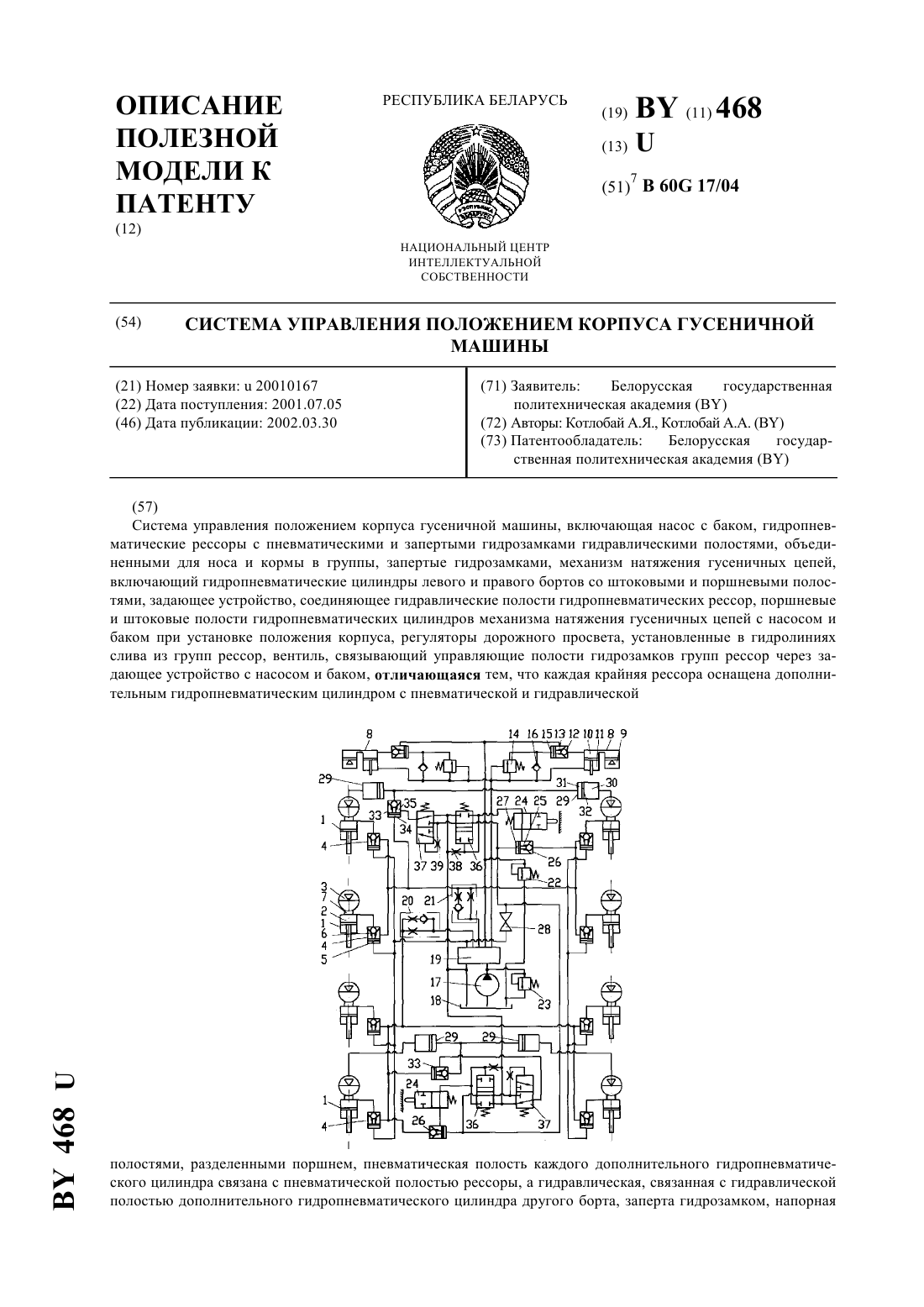
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОРПУСА ГУСЕНИЧНОЙ МАШИНЫ(71) Заявитель Белорусский национальный технический университет(72) Авторы Котлобай Анатолий Яковлевич Котлобай Андрей Анатольевич(73) Патентообладатель Белорусский национальный технический университет(57) Система управления положением корпуса гусеничной машины, включающая насос с баком, гидропневматические рессоры с гидравлическими полостями, механизм натяжения гусеничных цепей с гидропневматическими цилиндрами и задающее устройство, связывающее гидравлические полости рессор, гидропневматических цилиндров механизма натяжения гусеничных цепей с насосом и баком, систему стабилизации положения корпуса машины, выполненную в виде одного на рессору дозирующего устройства, включающего гидроцилиндр дозирования с поршнем, образующим две полости, двухпозиционный гидрораспределитель управления с электромагнитным управлением, связывающий последовательно одну из полостей гидроцилиндра с напорной полостью гидрозамка рессоры, и переключатель режима с электромагнитным управлением, связывающий вторую полость гидроцилиндра дозирования и управляющую полость гидрозамка рессоры с насосом, либо сливом в бак гидросистемы, отличающаяся тем, что гидроцилиндр дозирования оснащен двумя поршнями, связанными между собой штангой с магнитом, магнитное поле которого взаимодействует в крайних позициях поршней с двумя герконами, установленными на корпусе гидроцилиндра дозирования, и ориентированными вдоль его образующей, переключатель режима выполнен двухпозиционным с электромагнитным управлением по сигналу датчика давления рабочей жидкости данной рессоры.(56) 1. Платонов В.Ф., Коробкин В.А., Кожевников , Платонов Многоцелевые гусеничные шасси. - . Машиностроение, 1998 - С. 324. 2. Патент РБ 314, МПК 60 17/04, 2001. Полезная модель относится к транспортному машиностроению, преимущественно к гусеничным машинам с гидропневматической подвеской опорных катков и системой управления положением корпуса. Известна система управления положением корпуса гусеничной машины, включающая насос с баком, гидропневматические рессоры с гидравлическими полостями, механизм натяжения гусеничных цепей с гидропневматическими цилиндрами и задающее устройство, связывающее гидравлические полости рессор, гидропневматических цилиндров механизма натяжения гусеничных цепей с насосом и баком 1. Известная система управления положением корпуса гусеничной машины обеспечивает установку корпуса в положение номинального дорожного просвета, подъем, опускание, дифферент на нос, корму. Гидропневматическая подвеска гусеничной машины обеспечивает высокие показатели плавности хода. Нагруженность элементов ходовой части известной машины находится в допустимых пределах. Высока их надежность и долговечность. Недостатком известной системы управления положением корпуса является низкая стабильность параметров гидропневматической подвески опорных катков. Так, при движении гусеничной машины по трассе с неровной опорной поверхностью существенно увеличивается энергия колебаний, превращаемая амортизаторами рессор в тепло, в результате чего рабочая жидкость и газ рессор нагреваются. При нагревании и расширении газа и жидкости увеличивается дорожный просвет машины и соответственно давление в рабочих полостях рессор и механизмов натяжения гусеничных цепей. Это приводит к увеличению нагруженности элементов ходовой части, снижению надежности и долговечности их. Известна система управления положением корпуса гусеничной машины, включающая насос с баком, гидропневматические рессоры с гидравлическими полостями, механизм натяжения гусеничных цепей с гидропневматическими цилиндрами и задающее устройство, связывающее гидравлические полости рессор, гидропневматических цилиндров механизма натяжения гусеничных цепей с насосом и баком, систему стабилизации положения корпуса машины, выполненную в виде одного на рессору дозирующего устройства, включающего гидроцилиндр дозирования с поршнем, образующим две полости, двухпозиционный гидрораспределитель управления с электромагнитным управлением, связывающий последовательно одну из полостей гидроцилиндра с напорной полостью гидрозамка рессоры, и переключатель режима с электромагнитным управлением, связывающий вторую полость гидроцилиндра дозирования и управляющую полость гидрозамка рессоры с насосом, либо сливом в бак гидросистемы 2. Известная система управления положением корпуса гусеничной машины обеспечивает стабилизацию положения корпуса за счет слива части рабочей жидкости из рабочих полостей рессор в бак гидросистемы при нагревании и закачку рабочей жидкости из бака в рабочие полости рессор при охлаждении рабочей жидкости и газа. К недостаткам известной системы следует отнести разность нагрузочных режимов работы и перегрузку элементов ходовой части отдельных катков, снижение надежности работы и долговечности их. Так, при увеличении дорожного просвета и натяжения гусеничной цепи система стабилизации положения корпуса обеспечивает слив одинаковых объемов рабочей жидкости из полостей всех рессор, оборудованных дозирующими устройствами, без учета степени изменения объема рабочей жидкости и газа каждой рессоры. Также недостатком известной системы являются ограниченные функциональные возможности. Это объясняется тем, что система не обеспечивает возможность выполнения 2 1739 операций по установке корпуса машины в положение Номинальный дорожный просвет из любого положения, дифферент на нос, корму, установку корпуса машины в любое промежуточное положение. Задачей, решаемой полезной моделью, является расширение функциональных возможностей системы управления положением корпуса гусеничной машины, увеличение надежности и долговечности элементов ходовой части. Поставленная задача решается тем, что в системе управления положением корпуса гусеничной машины, включающей насос с баком, гидропневматические рессоры с гидравлическими полостями, механизм натяжения гусеничных цепей с гидропневматическими цилиндрами и задающее устройство, связывающее гидравлические полости рессор, гидропневматических цилиндров механизма натяжения гусеничных цепей с насосом и баком,систему стабилизации положения корпуса машины, выполненную в виде одного на рессору дозирующего устройства, включающего гидроцилиндр дозирования с поршнем, образующим две полости, двухпозиционный гидрораспределитель управления с электромагнитным управлением, связывающий последовательно одну из полостей гидроцилиндра с напорной полостью гидрозамка рессоры, и переключатель режима с электромагнитным управлением, связывающий вторую полость гидроцилиндра дозирования и управляющую полость гидрозамка рессоры с насосом, либо сливом в бак гидросистемы, гидроцилиндр дозирования оснащен двумя поршнями, связанными между собой штангой с магнитом,магнитное поле которого взаимодействует в крайних позициях поршней с двумя герконами, установленными на корпусе гидроцилиндра дозирования, и ориентированными вдоль его образующей, переключатель режима выполнен двухпозиционным с электромагнитным управлением по сигналу датчика давления рабочей жидкости данной рессоры. Существенные отличительные признаки предлагаемого технического решения обеспечивают возможность выполнения операций по установке корпуса машины в положение Номинальный дорожный просвет из любого положения, дифферент на нос, корму, установку корпуса машины в промежуточное положение. Также выравниваются нагрузочные режимы элементов ходовой части, увеличивается надежность работы и долговечность их. На чертеже представлена схема системы управления положением корпуса гусеничной машины. Система управления положением корпуса гусеничной машины включает гидропневматические рессоры 1 с гидравлическими 2 и пневматическими 3 полостями, разделенными эластичными диафрагмами. Гидравлическая полость 2 каждой рессоры 1 ограничена поршнем со штоком, связанным с рычагом и балансиром опорного катка (не показан). Каждая гидравлическая полость 2 заперта гидрозамком 4 с управляющей 5 и напорной 6 полостями. В гидравлической полости 2 установлен амортизатор 7. Для натяжения гусеничных цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 8 с пневматической 9, гидравлической поршневой 10 и штоковой 11 полостями. Поршневые полости 10 заперты гидрозамками 12, напорные полости 13 которых связаны между собой. Штоковые полости 11 гидропневматических цилиндров 8 связаны между собой и через предохранительный клапан 14 связаны с управляющими полостями 15 гидрозамков 12. Параллельно предохранительному клапану 14 установлен обратный клапан 16, обеспечивающий слив жидкости из управляющих полостей 15 в штоковые полости 11 гидропневматических цилиндров 8. Система управления положением корпуса гусеничной машины оснащена насосом 17 и баком 18. Для защиты насоса 17 от перегрузки в напорной магистрали установлен предохранительный клапан 19. Для дозирования объемов рабочей жидкости, поступающей в гидравлические полости 2 рессор 1, система управления положением корпуса гусеничной машины дополнительно оснащена одним на каждую рессору 1 дозирующим устройством 20. 3 1739 Дозирующее устройство 20 состоит из гидроцилиндра дозирования 21, двухпозиционных гидрораспределителей управления 22, переключателя режима 23 с электромагнитным управлением посредством электромагнитов 24, 25. Гидроцилиндр дозирования 21 оснащен двумя поршнями 26, 27, образующими рабочие полости 28, 29. Поршни 26, 27 связаны между собой штангой с магнитом 30, магнитное поле которого взаимодействует в крайних позициях поршней 26, 27 с двумя герконами 31, 32, установленными на корпусе гидроцилиндра дозирования 21 и ориентированными вдоль его образующей. Гидравлическая полость 2 каждой рессоры 1 оснащена датчиком давления 33, регистрирующим статическое давление в рессоре. Каждая из рабочих полостей 28, 29 гидроцилиндра дозирования 21 связана в первой либо второй позициях гидрораспределителя управления 22 с напорной полостью 6 гидрозамка 4, и в первой позиции переключателя режима 23 - с баком 18 гидросистемы, а во второй позиции переключателя режима 23, через двухпозиционный гидрораспределитель включения 34 с электромагнитным управлением посредством электромагнита 35, - с насосом 17. Управляющая полость 5 гидрозамка 4 связана в первой позиции переключателя режима 23, через гидрораспределитель включения 34, с насосом 17 и сливом в бак 18 - во второй позиции переключателя режима 23. Напорные полости 13 гидрозамков 12 и штоковые полости 11 гидропневматических цилиндров 8 связаны через трехпозиционный гидрораспределитель 36 с электромагнитным управлением посредством электромагнитов 37, 38 с баком 18 и через гидрораспределитель включения 34 с насосом 17. Давление в рабочих полостях 10 ограничено предохранительным клапаном 39. Каждое дозирующее устройство 20 оснащено блоком управления 40, принимающим сигналы герконов 31, 32, датчика давления 33 и обеспечивающим питание электромагнитов 24, 25. Система управления положением корпуса оснащена задающим устройством 41, принимающим сигналы блоков управления 40 и обеспечивающим питание электромагнитов 35, 37, 38. Система управления положением корпуса оснащена также датчиками положения корпуса (не показаны), установленными в зоне передних и задних опорных катков и регистрирующими информацию о дорожном просвете корпуса гусеничной машины. Информация принимается задающим устройством 41. Система управления положением корпуса гусеничной машины работает следующим образом. При выполнении операций по установке корпуса гусеничной машины в положение Номинальный дорожный просвет из положения минимального дорожного просвета с одновременным натяжением гусеничных цепей включается насос 17, задающее устройство 41 переключается в соответствующую позицию, подается питание на катушку электромагнита 35, переводящего гидрораспределитель включения 34 во вторую позицию, подается питание на катушку электромагнита 38, переводящего гидрораспределитель 36 в первую позицию, подается питание на катушки электромагнитов 25, переводящих переключатели режима 23 во вторую позицию. Жидкость от насоса 17 через гидрораспределитель 36 подается в напорные полости 13 гидрозамков 12, открывает их и поступает в поршневые полости 10 гидропневматических цилиндров 8. Жидкость из управляющих полостей 15 гидрозамков 12 открывает обратный клапан 16 и поступает на слив в бак 18. Жидкость из штоковых полостей 11 сливается в бак 18. Одновременно жидкость через переключатели режима 23, гидрораспределители управления 22 в первой позиции подается в полости 29 гидроцилиндров дозирования 21 дозирующих устройств 20. Поршни 27 перемещаются, приводя в движение поршни 26, и жидкость из полостей 28 через гидрораспределители управления 22 поступает в напорные полости 6 гидрозамков 4, открывает их и далее поступает в рабочие полости 2 рессор 1. 4 1739 Управляющие полости 5 гидрозамков 4 через переключатели режима 23 соединяются со сливом в бак 18. При достижении поршнями 26 крайнего положения электромагниты 30 входят в зону герконов 31. Герконы 31 замыкаются. Сигналы герконов 31 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 гидропневматических рессор 1 задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 подают питание на обмотки электромагнитов 24, и гидрораспределители управления 22 переводятся во вторую позицию. Жидкость через переключатели режима 23, гидрораспределители управления 22 во второй позиции подается в полости 28 гидроцилиндров дозирования 21 дозирующих устройств 20. Поршни 26 перемещаются, приводя в движение поршни 27, и жидкость из полостей 29 через гидрораспределители управления 22 поступает в напорные полости 6 гидрозамков 4, открывает их и далее поступает в рабочие полости 2 рессор 1. При достижении поршнями 27 крайнего положения электромагниты 30 входят в зону герконов 32. Герконы 32 замыкаются, а герконы 31 размыкаются. Сигналы герконов 32 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 гидропневматических рессор 1, задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 выключают питание обмоток электромагнитов 24, и гидрораспределители управления 22 переводятся в первую позицию под действием своих пружин. Далее цикл закачки рабочей жидкости в полости 2 продолжается, как описано выше. Корпус машины поднимается. Дозирующие устройства 20 обеспечивают равенство объемов рабочей жидкости, поступающей в рабочие полости 2 рессор 1. При достижении корпусом машины положения Номинальный дорожный просвет датчики положения корпуса (не показаны) подают сигнал. Задающее устройство 41 и блоки управления 40 фиксируют положение гидрораспределителей управления 22, обесточивая обмотки электромагнитов 24. Подъем корпуса машины прекращается. Одновременно производится натяжение гусеничной цепи. При достижении заданного значения натяжения открывается предохранительный клапан 39, ограничивающий давление жидкости в рабочих полостях гидропневматических цилиндров 8. Далее задающее устройство 41 и блоки управления 40 обесточивают катушки электромагнитов 25, 35, 38. Гидрораспределители 23, 34 возвращаются в первую, а гидрораспределитель 36 - во вторую позиции. Насос 17 выключается. Аналогично производится подъем корпуса машины в положение максимального (промежуточного) дорожного просвета. При опускании корпуса машины из положения максимального (промежуточного) дорожного просвета с одновременным натяжением гусеничной цепи включается насос 17,задающее устройство 41 переключается в соответствующую позицию, подается питание на катушку электромагнита 35, переводящего гидрораспределитель включения 34 во вторую позицию, подается питание на катушку электромагнита 38, переводящего гидрораспределитель 36 в первую позицию. Жидкость от насоса 17 через гидрораспределитель 36 подается в напорные полости 13 гидрозамков 12, открывает их и поступает в поршневые полости 10 гидропневматических цилиндров 8. Жидкость из управляющих полостей 15 гидрозамков 12 открывает обратный клапан 16 и поступает на слив в бак 18. Жидкость из штоковых полостей 11 сливается в бак 18. Одновременно жидкость через переключатели режима 23 подается в управляющие полости 5 гидрозамков 4 и открывает их. Рабочая жидкость из гидравлических полостей 2 рессор 1 через гидрозамки 4, гидрораспределители управления 22 в первой позиции поступает в полости 28 гидроцилиндров дозирования 21 дозирующих устройств 20. Поршни 26 перемещаются, приводя в движе 5 1739 ние поршни 27, и жидкость из полостей 29 через гидрораспределители управления 22, переключения 23 поступает на слив в бак 18. При достижении поршнями 27 крайнего положения электромагниты 30 входят в зону герконов 32. Герконы 32 замыкаются. Сигналы герконов 32 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 гидропневматических рессор 1 задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 подают питание на обмотки электромагнитов 24, и гидрораспределители управления 22 переводятся во вторую позицию. Рабочая жидкость из гидравлических полостей 2 рессор 1 через гидрозамки 4, гидрораспределители управления 22 во второй позиции поступает в полости 29 гидроцилиндров дозирования 21 дозирующих устройств 20. Поршни 27 перемещаются, приводя в движение поршни 26, и жидкость из полостей 28 через гидрораспределители управления 22, переключения 23 поступает на слив в бак 18. При достижении поршнями 26 крайнего положения электромагниты 30 входят в зону герконов 31. Герконы 31 замыкаются. Сигналы герконов 31 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 гидропневматических рессор 1 задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 выключают питание обмоток электромагнитов 24, и гидрораспределители управления 22 переводятся в первую позицию посредством своих пружин. Далее цикл слива рабочей жидкости из полостей 2 продолжается, как описано выше. Корпус машины опускается. Дозирующие устройства 20 обеспечивают равенство объемов рабочей жидкости, сливающейся из рабочих полостей 2 рессор 1. Далее задающее устройство 41 и блоки управления 40 обесточивают катушки электромагнитов 35, 38. Гидрораспределитель 34 возвращается в первую, а гидрораспределитель 36 - во вторую позиции. Насос 17 выключается. Ослабление натяжения гусеничной цепи при любом положении корпуса гусеничной машины осуществляется при включении насоса 17, подаче питания на катушки электромагнитов 35, 37. Гидрораспределитель 34 переводится во вторую, а гидрораспределитель 36 в третью позицию. Жидкость от насоса 17 через гидрораспределитель 36 подается в штоковые полости 11 гидропневматических цилиндров 8, открывается клапан 14, и жидкость поступает в управляющие полости 15 гидрозамков 12. Гидрозамки 12 открываются, и жидкость сливается из поршневых полостей 10 в бак 18. По окончании операции ослабления натяжения гусеничных цепей катушки электромагнитов 35, 37 обесточиваются. Гидрораспределитель 34 возвращается в первую, а гидрораспределитель 36 - во вторую позиции. Насос 17 выключается. Жидкость из управляющих полостей 15 через обратный клапан 16 поступает на слив в бак 18. При выполнении операции Дифферент на нос без изменения натяжения гусеничной цепи включается насос 17, подается питание на обмотки электромагнитов 25 переключателей режима 23 дозирующих устройств 20 задних рессор 1. Переключатели режима 23 дозирующих устройств 20 задних рессор 1 переводятся во вторую позицию. Жидкость от насоса 17 через переключатели режима 23 дозирующих устройств 20 передних рессор 1, находящихся в первой позиции, подается в управляющие полости 5 гидрозамков 4 и открывает их. Рабочая жидкость из гидравлических полостей 2 передних рессор 1 через гидрозамки 4, гидрораспределители управления 22 в первой позиции поступает в полости 28 гидроцилиндров дозирования 21 дозирующих устройств 20. Поршни 26 перемещаются, приводя в движение поршни 27, и жидкость из полостей 29 через гидрораспределители управления 22, переключения 23 поступает на слив в бак 18. 6 1739 При достижении поршнями 27 крайнего положения электромагниты 30 входят в зону герконов 32. Герконы 32 замыкаются. Сигналы герконов 32 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 передних рессор 1, задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 подают питание на обмотки электромагнитов 24, и гидрораспределители управления 22 переводятся во вторую позицию. Рабочая жидкость из гидравлических полостей 2 передних рессор 1 через гидрозамки 4, гидрораспределители управления 22 во второй позиции поступает в полости 29 гидроцилиндров дозирования 21 дозирующих устройств 20. Поршни 27 перемещаются, приводя в движение поршни 26, и жидкость из полостей 28 через гидрораспределители управления 22, переключения 23 поступает на слив в бак 18. При достижении поршнями 26 крайнего положения электромагниты 30 входят в зону герконов 31. Герконы 31 замыкаются. Сигналы герконов 31 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 передних рессор 1, задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 выключают питание обмоток электромагнитов 24, и гидрораспределители управления 22 переводятся в первую позицию посредством своих пружин. Далее цикл слива рабочей жидкости из полостей 2 передних рессор 1 продолжается,как описано выше. Нос машины опускается. Одновременно жидкость через переключатели режима 23, гидрораспределители управления 22 дозирующих устройств 20 задних рессор 1 подается в полости 29 гидроцилиндров дозирования 21 дозирующих устройств 20 задних рессор 1. Поршни 27 перемещаются, приводя в движение поршни 26, и жидкость из полостей 28 через гидрораспределители управления 22 поступает в напорные полости 6 гидрозамков 4, открывает их и далее поступает в рабочие полости 2 задних рессор 1. Управляющие полости 5 гидрозамков 4 через переключатели режима 23 соединяются со сливом в бак 18. При достижении поршнями 26 крайнего положения электромагниты 30 входят в зону герконов 31. Герконы 31 замыкаются. Сигналы герконов 31 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 задних рессор 1, задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 подают питание на обмотки электромагнитов 24, и гидрораспределители управления 22 переводятся во вторую позицию. Жидкость через переключатели режима 23, гидрораспределители управления 22 во второй позиции подается в полости 28 гидроцилиндров дозирования дозирующих устройств 20. Поршни 26 перемещаются, приводя в движение поршни 27, и жидкость из полостей 29 через гидрораспределители управления поступает в напорные полости 6 гидрозамков 4, открывает их и далее поступает в рабочие полости 2 задних рессор 1. При достижении поршнями 27 крайнего положения электромагниты 30 входят в зону герконов 32. Герконы 32 замыкаются, а герконы 31 размыкаются. Сигналы герконов 32 подаются на блоки управления 40 и далее на задающее устройство 41. При получении задающим устройством 41 сигналов от блоков управления 40 всех дозирующих устройств 20 задних рессор 1 задающее устройство 41 подает сигнал на блоки управления 40. Блоки управления 40 выключают питание обмоток электромагнитов 24, и гидрораспределители управления 22 переводятся в первую позицию под действием своих пружин. Далее цикл закачки рабочей жидкости в полости 2 задних рессор 1 продолжается, как описано выше. Корма машины поднимается. После окончания операции гидрораспределители возвращаются в исходное положение, насос 17 выключается. 7 1739 Аналогично производится операция Дифферент на корму. Система управления положением корпуса обеспечивает стабилизацию положения корпуса гусеничной машины. При движении гусеничной машины по трассе с неровной опорной поверхностью жидкость прокачивается через калиброванные отверстия амортизаторов 7 и нагревается. При нагревании жидкости увеличивается температура газа и его объем. Корпус машины поднимается (всплывает). Подъем корпуса машины ограничивают гусеничные цепи. В результате нагревания жидкости и газа рессор 1 увеличивается натяжение гусеничных цепей, давление в рабочих полостях 2 рессор 1, фиксируемое датчиками 33. При достижении давлений в рабочих полостях 2 порогового значения, заданного регулировкой датчиков давления 33, они подают сигналы на блоки управления 40. Задающее устройство 41 обрабатывает полученную информацию в соответствии с заложенными алгоритмами, включается насос 17, гидрораспределитель включения 34 переводится во вторую позицию. Дозирующие устройства 20 производят слив рабочей жидкости из полостей 2 рессор 1, как описано выше. Возможность работы дозирующих устройств 20 разных рессор 1 одновременно в режимах закачки и слива позволяет выравнивать давления в рабочих полостях всех рессор 1, обеспечивая оптимальный режим нагружения, высокую надежность работы элементов ходовой части, их долговечность. После окончания режима стабилизации система возвращается в исходное положение. При охлаждении жидкости и газа рессор 1 объемы их пневматических полостей 3 уменьшаются, корпус гусеничной машины опускается. Сигналы датчиков положения корпуса гусеничной машины (не показаны) обрабатываются в соответствии с заложенными алгоритмами. Задающее устройство 41 включает режим подъема корпуса гусеничной машины, который производится, как описано выше. Таким образом, предложенное техническое решение обеспечивает возможность выполнения операций по установке корпуса машины в положение Номинальный дорожный просвет из любого положения, дифферент на нос, корму, установку корпуса машины в промежуточное положение. Также выравниваются нагрузочные режимы элементов ходовой части, увеличивается надежность работы и долговечность их. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: B60G 17/04
Метки: управления, корпуса, гусеничной, машины, система, положением
Код ссылки
<a href="https://by.patents.su/8-u1739-sistema-upravleniya-polozheniem-korpusa-gusenichnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Система управления положением корпуса гусеничной машины</a>
Система управления положением корпуса гусеничной машины
Номер патента: U 552
Опубликовано: 30.06.2002
Авторы: Котлобай Андрей Анатольевич, Ковалев Ярослав Никитич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: система, машины, гусеничной, управления, положением, корпуса
Текст:
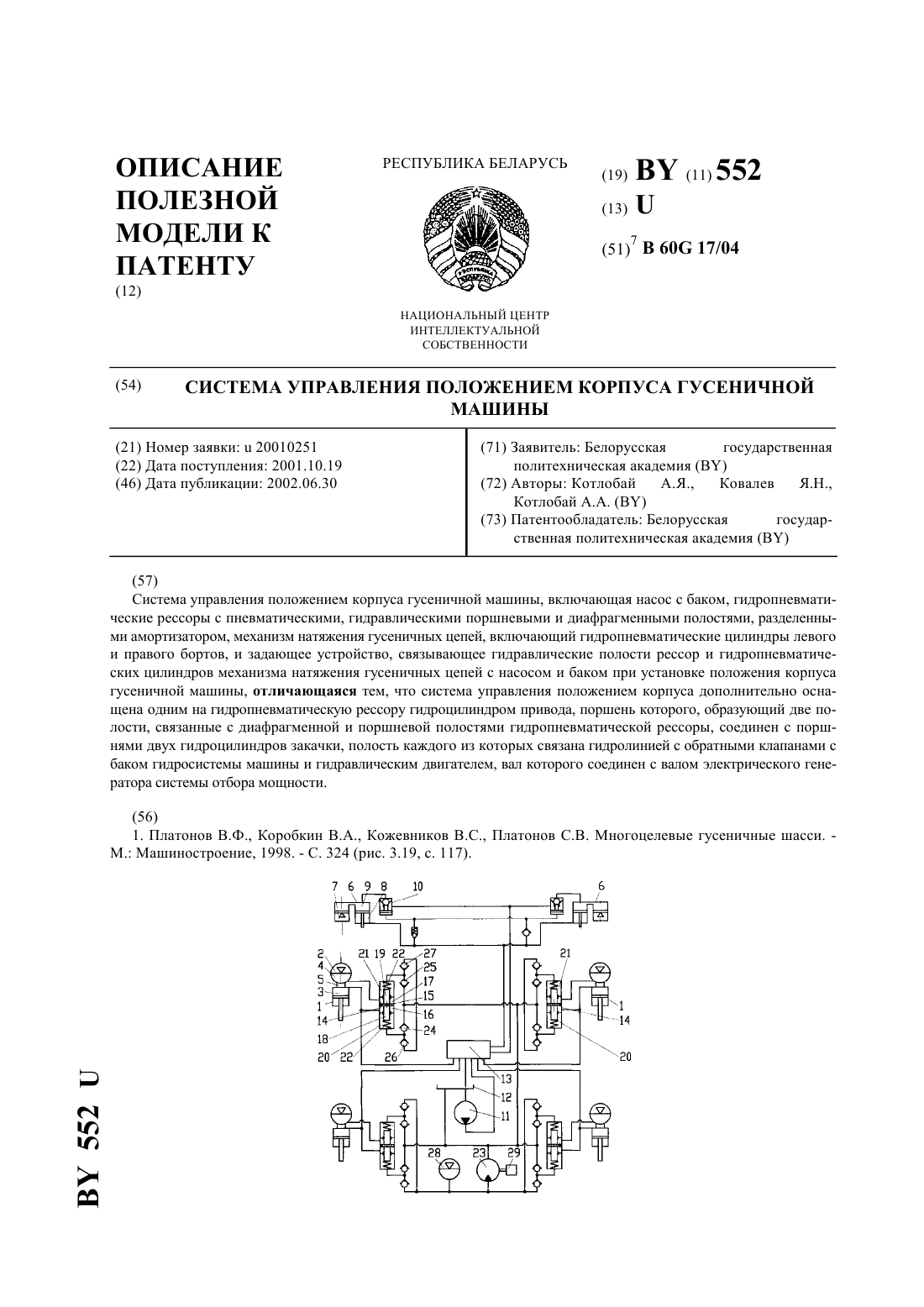
...цепей каждого борта система управления положением корпуса оснащена гидропневматическим механизмом натяжения, включающим один на борт гидропневматический цилиндр 6 с пневматической 7, гидравлической штоковой 8 и поршневой 9 полостями. Поршневые полости 9 заперты гидрозамками 10. Гидравлические полости 3, 4 гидропневматических рессор 1, 8 гидропневматического цилиндра 6, напорные полости гидрозамков 10 связаны с насосом 11 и баком 12...
Система управления положением корпуса гусеничной машины
Номер патента: U 551
Опубликовано: 30.06.2002
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: управления, система, положением, гусеничной, машины, корпуса
Текст:
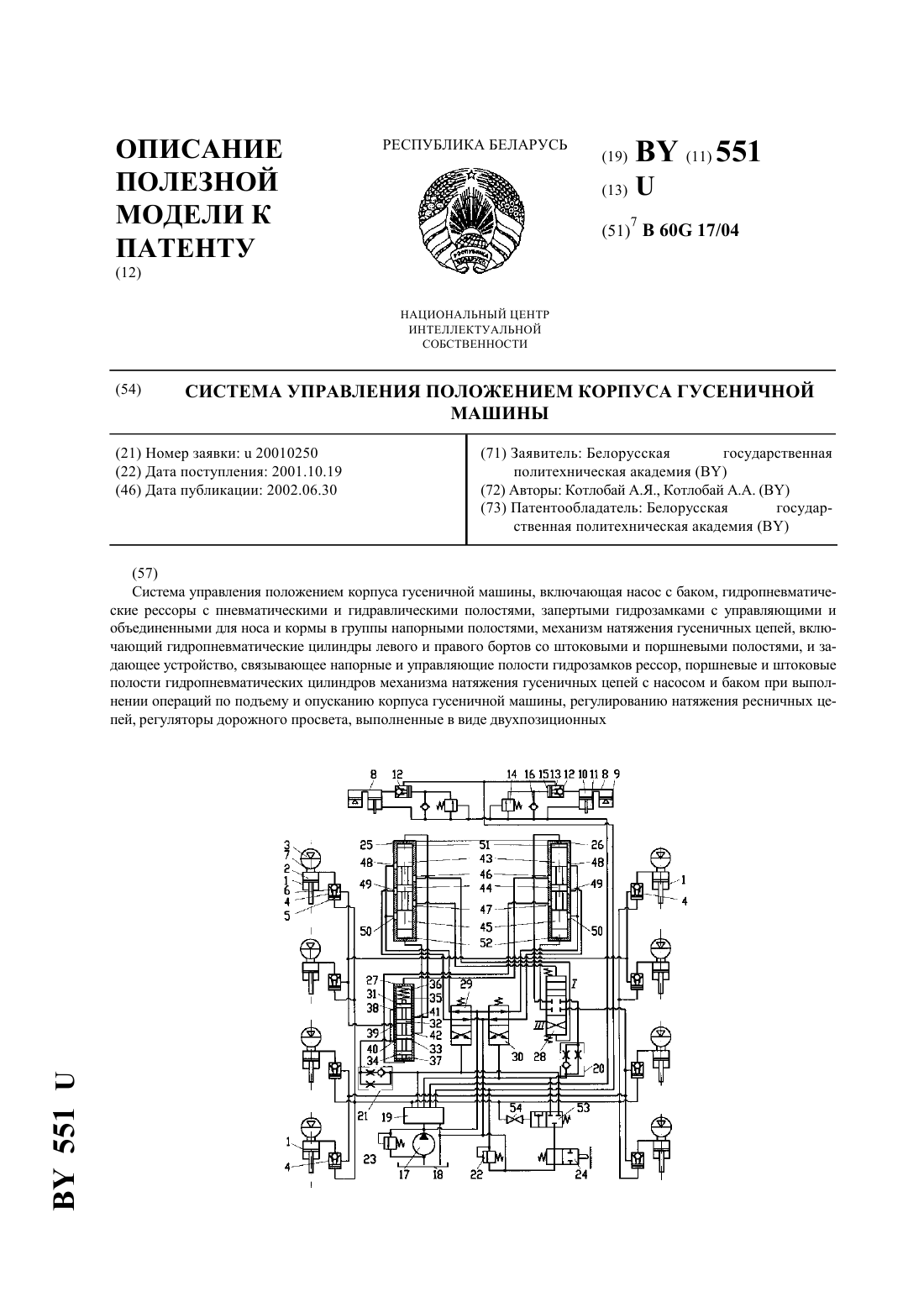
...к гидрозамкам 4 рессор 1 передней группы, открывает их и поступает в полости 2. После достижения плунжером гидроцилиндра дозирования 25 крайнего положения (на чертеже нижнего) жидкость от насоса 17 через двухпозиционный гидрораспределитель переключения 29 (во второй позиции его), каналы 49, 46 гидроцилиндра дозирования 25 поступает в торцевую управляющую полость (на чертеже нижнюю) гидрораспределителя управления 28. Вторая торцевая...
Система управления положением корпуса гусеничной машины
Номер патента: U 467
Опубликовано: 30.03.2002
Авторы: Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: машины, управления, положением, гусеничной, система, корпуса
Текст:
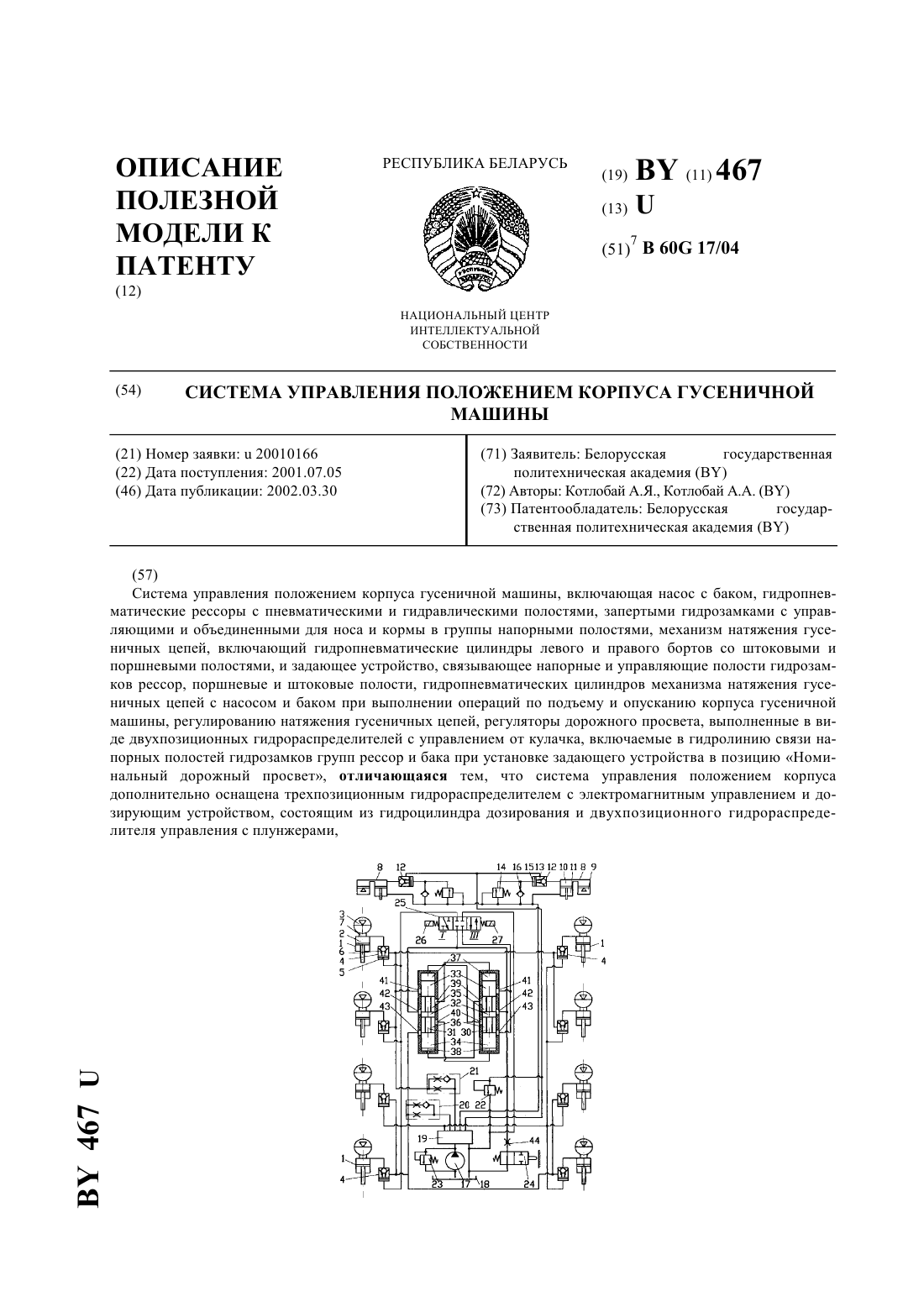
...дозирования объемов рабочей жидкости, закачиваемой в гидравлические полости 2 рессор 1, система управления положением корпуса гусеничной машины дополнительно оснащена трехпозиционным гидрораспределителем 25 с электромагнитным управлением посредством электромагнитов 26, 27 и дозирующим устройством, конструктивная схема которого позволяет работу в режимах сумматора и делителя потоков. Дозирующее устройство состоит из одинаковых по конструктивной...
Система управления положением корпуса гусеничной машины
Номер патента: U 1165
Опубликовано: 30.12.2003
Авторы: Бусел Алексей Владимирович, Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: B60G 17/04
Метки: корпуса, гусеничной, управления, машины, положением, система
Текст:
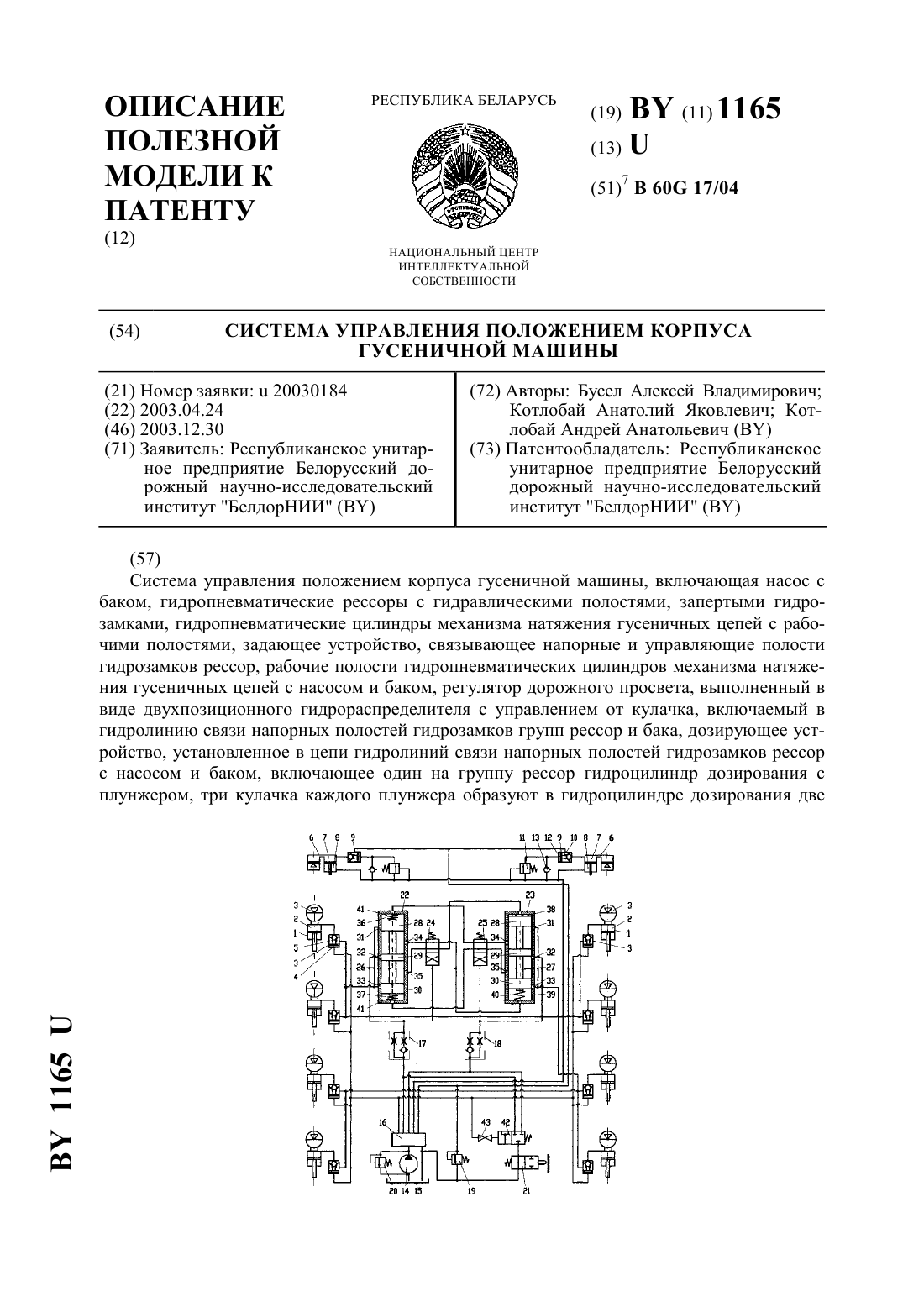
...рабочие полости 36, 37, 38, 39. В рабочей полости 39 гидроцилиндра дозирования 23 задней группы рессор 1 установлена пружина 40, обеспечивающая плунжеру 27 две позиции, у гидроцилиндра дозирования 22 передней группы рессор 1 пружина 41 установлена в каждой рабочей полости 36, 37, обеспечивая плунжеру 26 третью позицию. Пружины 40, 41 имеют незначительную жесткость и не оказывают заметного влияния на работу дозирующего устройства. Центральные...
Система управления положением корпуса гусеничной машины
Номер патента: U 468
Опубликовано: 30.03.2002
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
МПК: B60G 17/04
Метки: система, гусеничной, положением, управления, машины, корпуса
Текст:
...предохранительные клапаны 14 связаны с управляющими полостями 15 гидрозамков 12. Параллельно предохранительным клапанам 14 установлены обратные клапаны 16, обеспечивающие слив жидкости из управляющих полостей 15 в штоковые полости 11 гидропневматических цилиндров 8. Для выполнения штатных операций по изменению положения корпуса гусеничной машины, установке его в положение Номинальный дорожный просвет, регулирования натяжения гусеничной цепи...
Предыдущий патент: Установка для пропитки древесных заготовок
Следующий патент: Объемная гидропередача
Случайный патент: Спички-книжечка