Способ оценки эффективности ходовой системы колесной машины
Текст
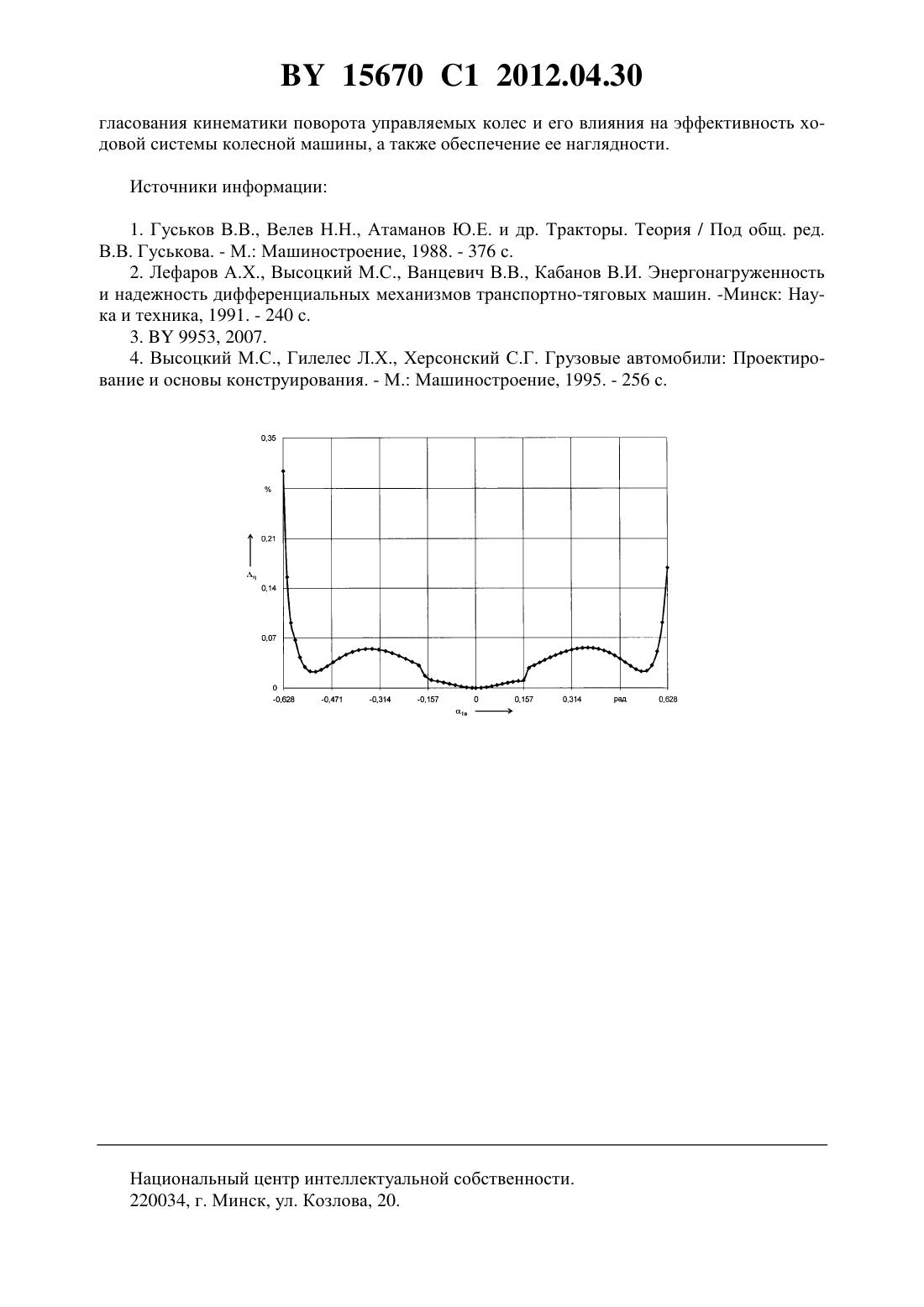
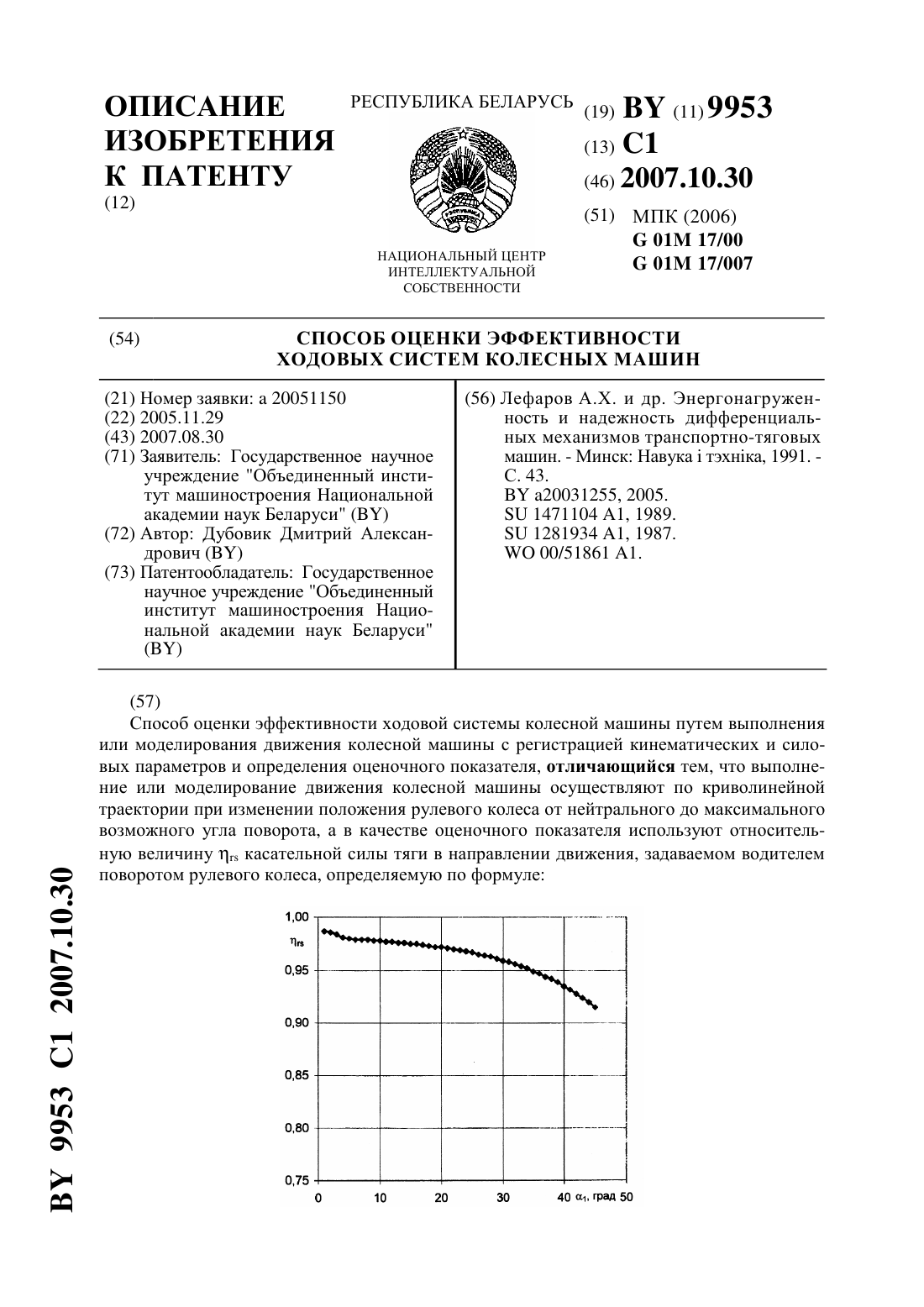
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ ХОДОВОЙ СИСТЕМЫ КОЛЕСНОЙ МАШИНЫ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Автор Дубовик Дмитрий Александрович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Способ оценки эффективности ходовой системы колесной машины, при котором осуществляют криволинейное движение колесной машины с регистрацией кинематических и силовых параметров движения, определяют оценочный показатель и строят его графическую зависимость, по которой оценивают эффективность ходовой системы, отличающийся тем, что криволинейное движение колесной машины осуществляют при изменении положения управляемых колес от одного крайнего положения до другого крайнего положения и при каждом угле поворота внутреннего управляемого колеса первого моста оценочный показательопределяют с учетом рассогласования кинематики поворота управляемых колес из выражения-,- коэффициент полезного действия ходовой системы при вы полнении криволинейного движения колесной машины с теоретическими значениями углов поворота управляемых колес, соответствующими их качению по концентрическим окружностям без бокового скольжения ходовой системы при выполнении криволинейного движения колесной машины с действительными значениями углов поворота управляемых колес, определяемыми кинематикой рулевого привода 15670 1 2012.04.30 и- тяговые усилия, реализуемые соответственно правым и левым ведущими колесами -го мостаи- действительные скорости поступательного движения соответственно правого и левого ведущих колес -го моста(-) и (-) - рассогласования кинематики поворота соответственно правого и левого управляемых колес -го мостаи- значения углов правого и левого управляемых колес -го моста, соответствующие их качению по концентрическим окружностям без бокового скольженияи- действительные значения углов поворота соответственно правого и левого управляемых колес -го мостаи- теоретические скорости поступательного движения соответственно правого и левого ведущих колес -го моста- порядковый номер ведущего моста- количество ведущих мостов,а эффективность ходовой системы оценивают по графической зависимости оценочного показателяот угла поворота внутреннего управляемого колеса первого моста. Изобретение относится к области машиностроения, в частности к способам оценки эффективности ходовых систем колесных машин, и может быть использовано при исследованиях эффективности и проектировании ходовых систем колесных машин. Известен способ оценки эффективности колесной машины 1 путем выполнения или моделирования движения колесной машины с регистрацией кинематических и силовых параметров и определения оценочного показателя, в качестве которого выступает относительная величина тяговой мощности, расходуемой на преодоление крюковой нагрузки,определяемая по формуле где- оценочный показатель (тяговый коэффициент полезного действия ходовой системы колесных машин)- тяговая мощность, расходуемая на преодоление крюковой нагрузки, Вт//и- мощность, подведенная соответственно к правому и левому ведущим колесам -г моста, Вт- буксование ведущих колес машины- крюковая нагрузка,//и- тяговые усилия правого и левого ведущих колес -го моста,- количество мостов колесной машины. Данный способ позволяет оценить энергетическую эффективность ходовых систем колесных машин, в том числе тракторов в агрегате с сельскохозяйственными орудиями, с позиции выполнения ими тяговых работ при установившемся движении по горизонтальной поверхности. Недостатком способа является то, что он не учитывает транспортную нагрузку машины и, как следствие, не применим для оценки энергетической эффективности ходовых систем транспортных и транспортно-тяговых машин. Известен способ оценки эффективности ходовой системы колесной машины 2 путем выполнения или моделирования движения колесной машины с регистрацией кинематиче 2 15670 1 2012.04.30 ских и силовых параметров и определения оценочного показателя, в качестве которого выступает относительная величина тяговой мощности, расходуемой на преодоление крюковой нагрузки, и мощности, расходуемой на транспортировку перевозимого груза, определяемая по формуле где- оценочный показатель (полный коэффициент полезного действия ходовой системы колесной машины)- тяговая мощность, расходуемая на преодоление крюковой нагрузки, Вт//и- мощность, расходуемая правым и левым колесами - моста на транспортировку перевозимого полезного груза, Вт- мощность, расходуемая на преодоление силы сопротивления разгону колесной машины, продольной составляющей силы тяжести при движении колесной машины на подъем, сопротивления воздуха и других сил сопротивления движению, кроме тяговой нагрузки и сил сопротивления движению колес, обусловленных перевозимым полезным грузом, Вт//и- мощность, подведенная к правому и левому ведущим колесам -го моста, Вт- крюковая нагрузка,0 0/ и // - силы сопротивления движению правого и левого колес -го моста, обусловленные перевозимым полезным грузом, Н- алгебраическая сумма действующей на машину силы сопротивления разгону, продольной составляющей силы тяжести при движении колесной машины на подъем, сопротивления воздуха и других сил сопротивления движению, кроме тяговой нагрузки и сил сопротивления движению колес, обусловленных перевозимым полезным грузом, Н//и- тяговые усилия правого и левого ведущих колес -го моста,//и- буксования ведущих правого и левого колес -го моста. Данный способ позволяет оценить энергетическую эффективность ходовых систем колесных машин с позиции выполнения ими как тяговых, так и транспортных работ или же при совмещении последних. Недостатком этого способа является то, что он не учитывает потери мощности, обусловленные несовершенством конструкции ходовых систем и связанные с отклонением направления реализации касательных сил тяги от направления движения, задаваемого водителем поворотом рулевого колеса. Наиболее близким по технической сущности к заявляемому решению является способ оценки эффективности ходовой системы колесной машины 3 путем выполнения или моделирования движения колесной машины с регистрацией кинематических и силовых параметров и определения оценочного показателя. Причем в качестве оценочного показателя служит относительная величина общего тягового усилия в направлении движения, задаваемом водителем поворотом рулевого колеса, определяемая по формуле 15670 1 2012.04.30 где- оценочный показатель эффективности ходовых систем колесных машин (коэффициент полезного действия)//и- мощность, расходуемая правым и левым колесами -го моста на осуществление движения колесной машины с транспортируемым полезным грузом и тяговой нагрузкой в направлении, задаваемом водителем поворотом рулевого колеса, Вт//и- мощность, подведенная к правому и левому ведущим колесам -го моста,Вт//и- тяговые усилия правого и левого ведущих колес -го моста, Н/ и// - углы между направлением движения правого и левого колес -го моста и направлением движения, задаваемым водителем поворотом рулевого колеса, рад//и- буксования правого и левого ведущих колес -го моста- количество мостов колесной машины. Оценочный показатель(3) в отличие от оценочных показателей (1) и (2) учитывает потери мощности, связанные с отклонением направления реализации ведущими колесами тяговых усилий от направления движения, задаваемого водителем поворотом рулевого колеса для совершения полезной работы. Недостатком данного способа является то, что он не позволяет оценивать влияние рассогласования кинематики поворота управляемых колес на эффективность ходовой системы колесной машины. Задачей настоящего изобретения является повышение достоверности оценки эффективности ходовой системы колесной машины при криволинейном движении путем определения рассогласования кинематики поворота управляемых колес и его влияния на эффективность ходовой системы колесной машины, а также обеспечение ее наглядности. Решение поставленной задачи достигается в способе оценки эффективности ходовой системы колесной машины, при котором осуществляют криволинейное движение колесной машины с регистрацией кинематических и силовых параметров движения, определяют оценочный показатель и строят его графическую зависимость, по которой оценивают эффективность ходовой системы, причем, согласно изобретению, криволинейное движение колесной машины осуществляют при изменении положения управляемых колес от одного крайнего положения до другого крайнего положения и при каждом угле поворота внутреннего управляемого колеса первого моста оценочный показательопределяют с учетом рассогласования кинематики поворота управляемых колес из выражения- коэффициент полезного действия ходовой системы при вы полнении криволинейного движения колесной машины с теоретическими значениями углов поворота управляемых колес, соответствующими их качению по концентрическим окружностям без бокового скольжения ходовой системы при выполнении криволинейного движения колесной машины с действительными значениями углов поворота управляемых колес, определяемыми кинематикой рулевого привода 4 15670 1 2012.04.30 и- тяговые усилия, реализуемые соответственно правым и левым ведущими колесами -го мостаи- действительные скорости поступательного движения соответственно правого и левого ведущих колес -го моста и- рассогласования кинематики поворота соответственно правого и левого управляемых колес -го мостаи- значения углов правого и левого управляемых колес -го моста, соответствующие их качению по концентрическим окружностям без бокового скольженияи- действительные значения углов поворота соответственно правого и левого управляемых колес -го мостаи- теоретические скорости поступательного движения соответственно правого и левого ведущих колес -го моста- порядковый номер ведущего моста- количество ведущих мостов,а эффективность ходовой системы оценивают по графической зависимости оценочного показателяот угла поворота внутреннего управляемого колеса первого моста. Заявляемый способ позволяет проводить количественную оценку влияния рассогласования кинематики поворота управляемых колес на эффективность ходовой системы колесной машины с обеспечением ее наглядной восприимчивости. Изобретение поясняется фигурой, на которой приведена графическая зависимость оценочного показателя (4) от углов поворота внутреннего управляемого колеса первого моста из левого крайнего положения в правое крайнее положение (для удобства визуального восприятия углы поворота внутреннего управляемого колеса первого моста при его повороте из нейтрального положения в левое крайнее положение приняты отрицательными). Пример реализации способа. С помощью заявляемого способа оценивалось влияние рассогласования кинематики поворота управляемых колес на эффективность ходовой системы внедорожной машины МЗКТ-79305 с колесной формулой 88 и двумя передними управляемыми мостами путем осуществления ею криволинейного движения с регистрацией кинематических и силовых параметров, определения оценочного показателя и построения графической зависимости. В ходе криволинейного движения внедорожной машины МЗКТ-79305 фиксировались такие кинематические параметры, как действительные скорости поступательного движения правого и левого ведущих колеси , действительные значения углов поворота соответственно правого и левого управляемых колеси , угловая скорость вращения коленчатого вала двигателя . Кроме того, фиксировались силовые параметры тяговые усилияи , реализуемые соответственно правым и левым ведущими колесами. Действительные значения углов поворота соответственно правого и левого управляемых колесификсировались с помощью датчиков углов поворота управляемых колес. Для левого крайнего положения управляемых колес действительное значение угла поворота левого колеса первого управляемого моста 1 составило 0,628 рад, действительное значение угла поворота правого колеса первого управляемого моста- 0,57 рад, действительное значение угла поворота левого колеса второго управляемого моста 2 0,463 рад, действительное значение угла поворота правого колеса первого управляемого моста 2 - 0,398 рад. Для каждого значения угла поворота управляемых колес определяются численные значения оценочного показателя , выражение (4) для расчета которого применительно для внедорожной машины МЗКТ-79305 преобразуется к следующему виду В выражении для определения оценочного показателятеоретические скорости поступательного движения правого и левого ведущих колесирассчитывались по формуле, где- радиус качения колес -го моста, м- передаточное число трансмиссии колесной машины от коленчатого вала двигателя до колес -г моста. Теоретические значения углов правого и левого управляемых колесиопределялись из условия качения по концентрическим окружностям без бокового скольжения 4. Для внедорожной машины МЗКТ-79305 при повороте управляемых колес из левого крайнего положения в нейтральное положение теоретические значения угловиопределялись по выражениям 2 где 01 - расстояние между точками пересечения осей поворота колес первого управляемого моста внедорожной машины МЗКТ-79305 с плоскостью дороги, м, 01 - 1,898 м 3 и 4 - расстояния от первого управляемого моста соответственно до третьего и четвертого мостов внедорожной машины МЗКТ-79305, м, 36,25 м, 48,45 м 02 - расстояние между точками пересечения осей поворота колес второго управляемого моста внедорожной машины МЗКТ-79305 с плоскостью дороги, м, 021,898 м 2 - расстояние от первого управляемого моста до второго управляемого моста внедорожной машины МЗКТ-79305, м, 22,35 м. Теоретические значения углов правого и левого управляемых колеси , соответствующие их качению по концентрическим окружностям без бокового скольжения, при повороте управляемых колес из нейтрального положения в правое крайнее положение определялись по выражениям 2 Для левого крайнего положения управляемых колес теоретическое значение угла поворота левого колеса первого управляемого моста 1 составило 0,628 рад, теоретическое значение угла поворота правого колеса первого управляемого моста- 0,549 рад, теоретическое значение угла поворота левого колеса второго управляемого моста 2 0,459 рад, теоретическое значение угла поворота правого колеса первого управляемого моста 2 - 0,394 рад. По результатам проведенных расчетов строилась графическая зависимость оценочного показателяот углов поворота внутреннего управляемого колеса первого моста, приведенная на фигуре. Анализ графической зависимости на фигуре свидетельствует о том, что оценочный показательравен нулевому значению только при нейтральном положении управляемых колес, т.е. в случае отсутствия рассогласования кинематики их поворота. При повороте управляемых колес из нейтрального положения в обе стороны возникающее рассогласование кинематики их поворота оказывает влияние на эффективность ходовой системы колесной машины. При повороте управляемых колес из нейтрального положения влево значения оценочного показателяувеличиваются от нуля до 0,013 по зависимости, близкой к линейной. При повороте внутреннего управляемого колеса первого моста на угол 0,1450,186 рад дифференциалы свободного хода отключают привод крутящего момента к наружным неуправляемым колесам третьего и четвертого мостов, что сопровождается увеличением оценочного показателядо 0,032 . С дальнейшим поворотом управляемых колес оценочный показательувеличивается и при повороте внутреннего управляемого колеса первого моста на угол 0,339 рад составляет 0,055 . С дальнейшим увеличением угла поворота внутреннего управляемого колеса первого моста значения оценочного показателяуменьшаются и при угле, равном 0,524 рад, составляют 0,022 . С дальнейшим поворотом управляемых колес в левое крайнее положение оценочный показательувеличивается и при максимальных углах поворота управляемых колес достигает максимального значения 0,304 . При повороте управляемых колес из нейтрального положения вправо значения оценочного показателяувеличиваются от нуля до 0,011 по зависимости, близкой к линейной. При повороте внутреннего управляемого колеса первого моста на угол 0,1450,175 рад дифференциалы свободного хода отключают привод крутящего момента к наружным неуправляемым колесам третьего и четвертого мостов, что сопровождается увеличением оценочного показателядо 0,028 . С дальнейшим поворотом управляемых колес оценочный показательувеличивается и при повороте внутреннего управляемого колеса первого моста на угол 0,367 рад составляет 0,056 . С дальнейшим увеличением угла поворота внутреннего управляемого колеса первого моста значения оценочного показателяуменьшаются и при угле, равном 0,541 рад, составляют 0,023 . С дальнейшим поворотом управляемых колес в правое крайнее положение оценочный показательувеличивается и при максимальных углах поворота управляемых колес достигает значения 0,17 . Таким образом, достигается повышение достоверности оценки эффективности ходовой системы колесной машины при криволинейным движении путем определения рассо 7 15670 1 2012.04.30 гласования кинематики поворота управляемых колес и его влияния на эффективность ходовой системы колесной машины, а также обеспечение ее наглядности. Источники информации 1. Гуськов В.В., Велев Н.Н., Атаманов Ю.Е. и др. Тракторы. Теория / Под общ. ред. В.В. Гуськова. - М. Машиностроение, 1988. - 376 с. 2. Лефаров А.Х., Высоцкий М.С., Ванцевич В.В., Кабанов В.И. Энергонагруженность и надежность дифференциальных механизмов транспортно-тяговых машин. -Минск Наука и техника, 1991. - 240 с. 3.9953, 2007. 4. Высоцкий М.С., Гилелес Л.Х., Херсонский С.Г. Грузовые автомобили Проектирование и основы конструирования. - М. Машиностроение, 1995. - 256 с. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01M 17/06
Метки: колесной, эффективности, системы, способ, оценки, машины, ходовой
Код ссылки
<a href="https://by.patents.su/8-15670-sposob-ocenki-effektivnosti-hodovojj-sistemy-kolesnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Способ оценки эффективности ходовой системы колесной машины</a>
Способ оценки рассогласования кинематических параметров поворота управляемых колес мобильной машины
Номер патента: 15669
Опубликовано: 30.04.2012
Автор: Дубовик Дмитрий Александрович
МПК: G01M 17/06
Метки: машины, колес, параметров, управляемых, способ, рассогласования, мобильной, кинематических, оценки, поворота
Текст:
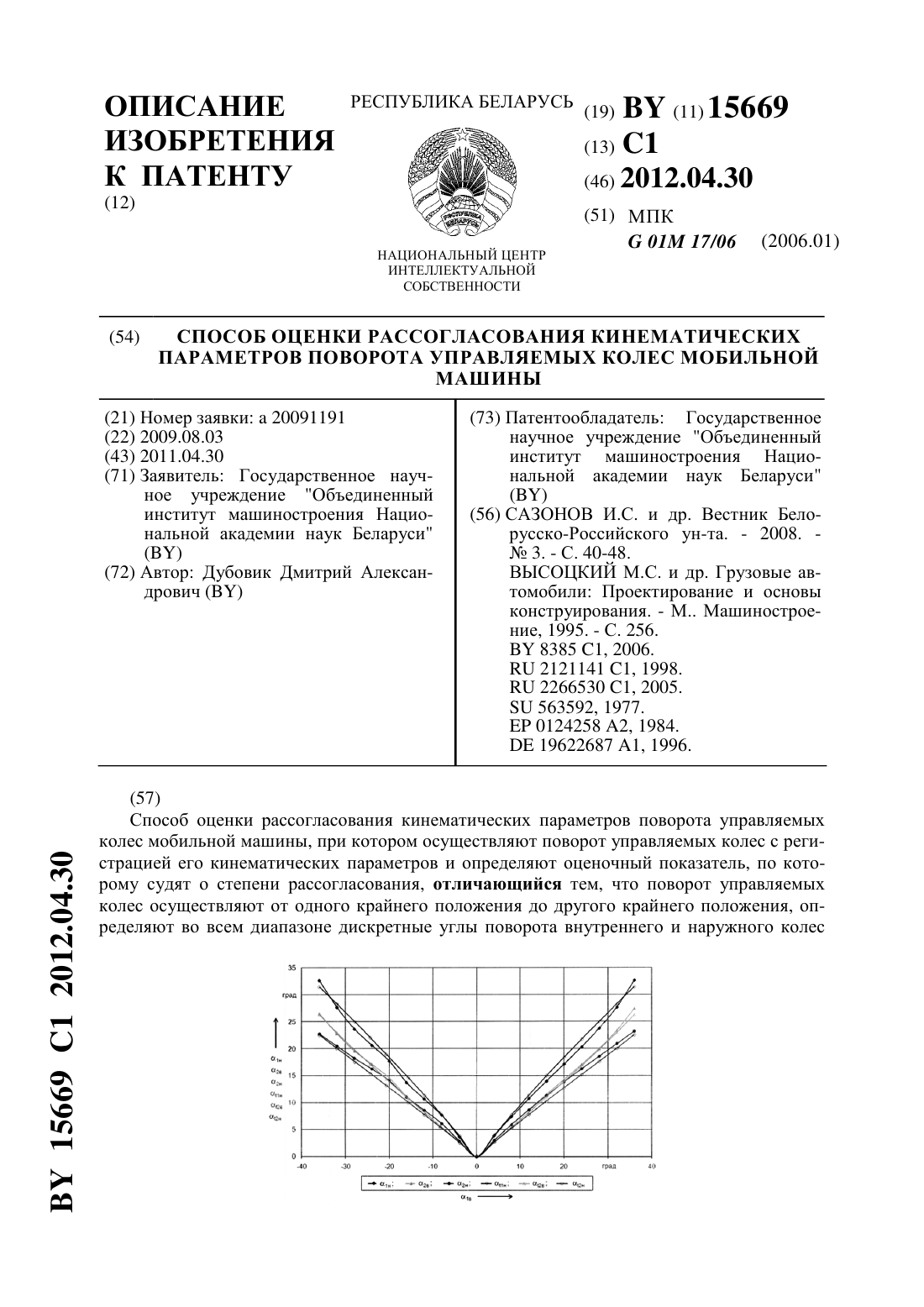
...колес колесных машин с одним, двумя и более управляемыми мостами. Изобретение поясняется фигурой, на которой приведена диаграмма углов поворота управляемых колес мобильной машины в виде графических зависимостей углов поворота наружного управляемого колеса первого моста, внутренних и наружных управляемых колес второго моста от углов поворота внутреннего управляемого колеса первого моста из левого крайнего положения в правое крайнее...
Противобуксовочная система колесной машины
Номер патента: U 5939
Опубликовано: 28.02.2010
Авторы: Высоцкий Михаил Степанович, Лисичик Александр Сергеевич, Дубовик Дмитрий Александрович
МПК: B60K 17/00
Метки: противобуксовочная, колесной, машины, система
Текст:
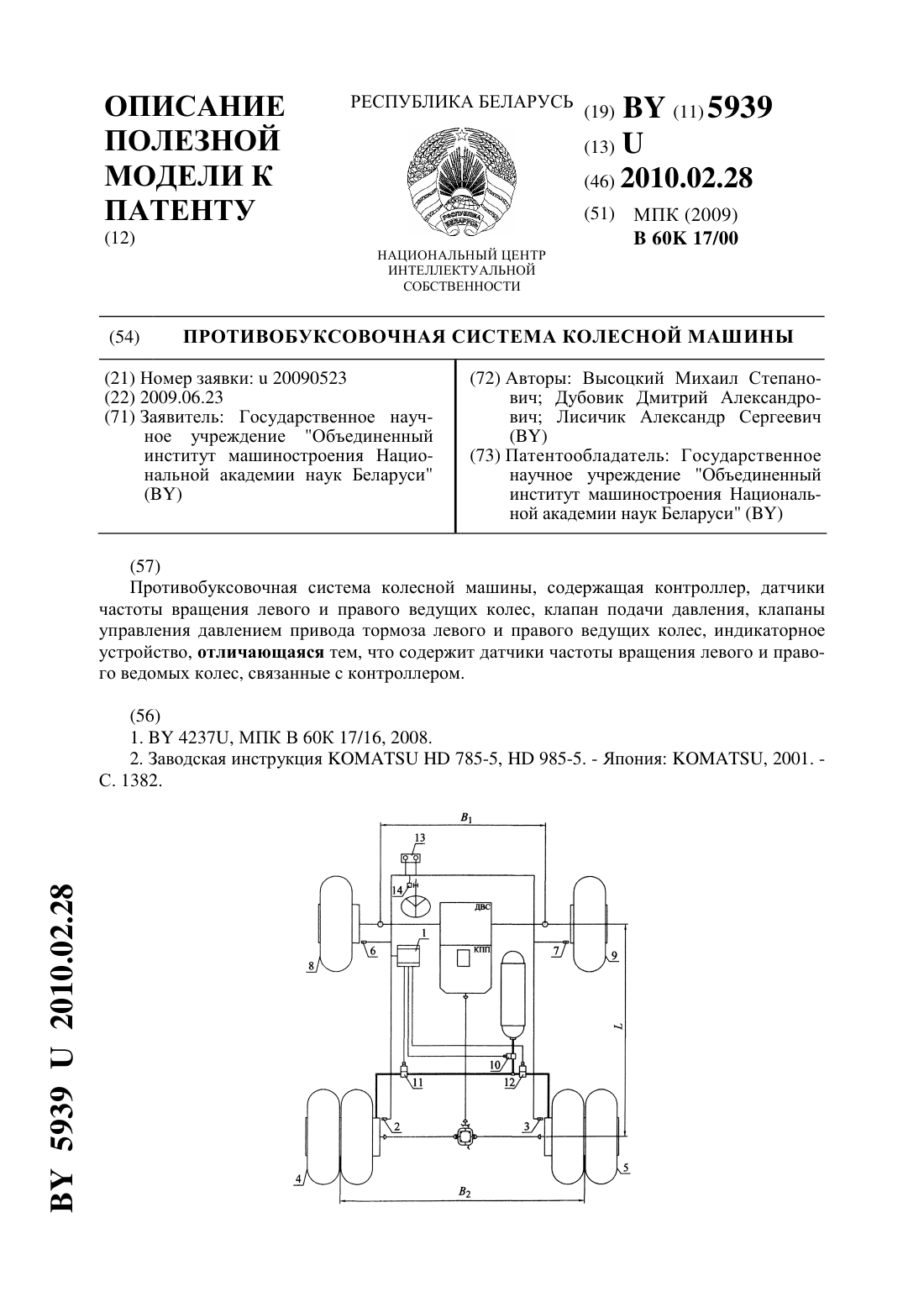
...поступательные скорости движения левого 8 и правового 9 ведомых колес посредством умножения радиусов качения левого 8 и правого 9 ведомых колес на соответствующие частоты вращения левого 8 и правого 9 ведомых колес 11,11,где 1 - поступательная скорость движения левого ведомого колеса 8 1 - радиус качения левого колеса 8 в ведомом режиме 1 - частота вращения левого ведомого колеса 8 по показаниям датчика 6 частоты вращения левого...
Способ оценки эффективности ходовых систем колесных машин
Номер патента: 9953
Опубликовано: 30.10.2007
Автор: Дубовик Дмитрий Александрович
МПК: G01M 17/00, G01M 17/007
Метки: систем, способ, эффективности, машин, колесных, ходовых, оценки
Текст:
...силы тяги на ведущих колесах -го моста, Н/и- буксования ведущих колес -го моста. Данный способ позволяет оценить энергетическую эффективность ходовых систем колесных машин с позиции выполнения ими как тяговых, так и транспортных работ, или же при совмещении последних. Недостатком этого способа является то, что он не учитывает потери мощности, обусловленные несовершенством конструкции ходовых систем и связанные с отклонением...
Противобуксовочная система колесной машины
Номер патента: U 6001
Опубликовано: 28.02.2010
Авторы: Егоров Александр Николаевич, Дубовик Дмитрий Александрович, Заболоцкий Михаил Михайлович, Лисичик Александр Сергеевич, Высоцкий Михаил Степанович, Белоус Михаил Михайлович
МПК: B60K 17/00
Метки: колесной, противобуксовочная, система, машины
Текст:
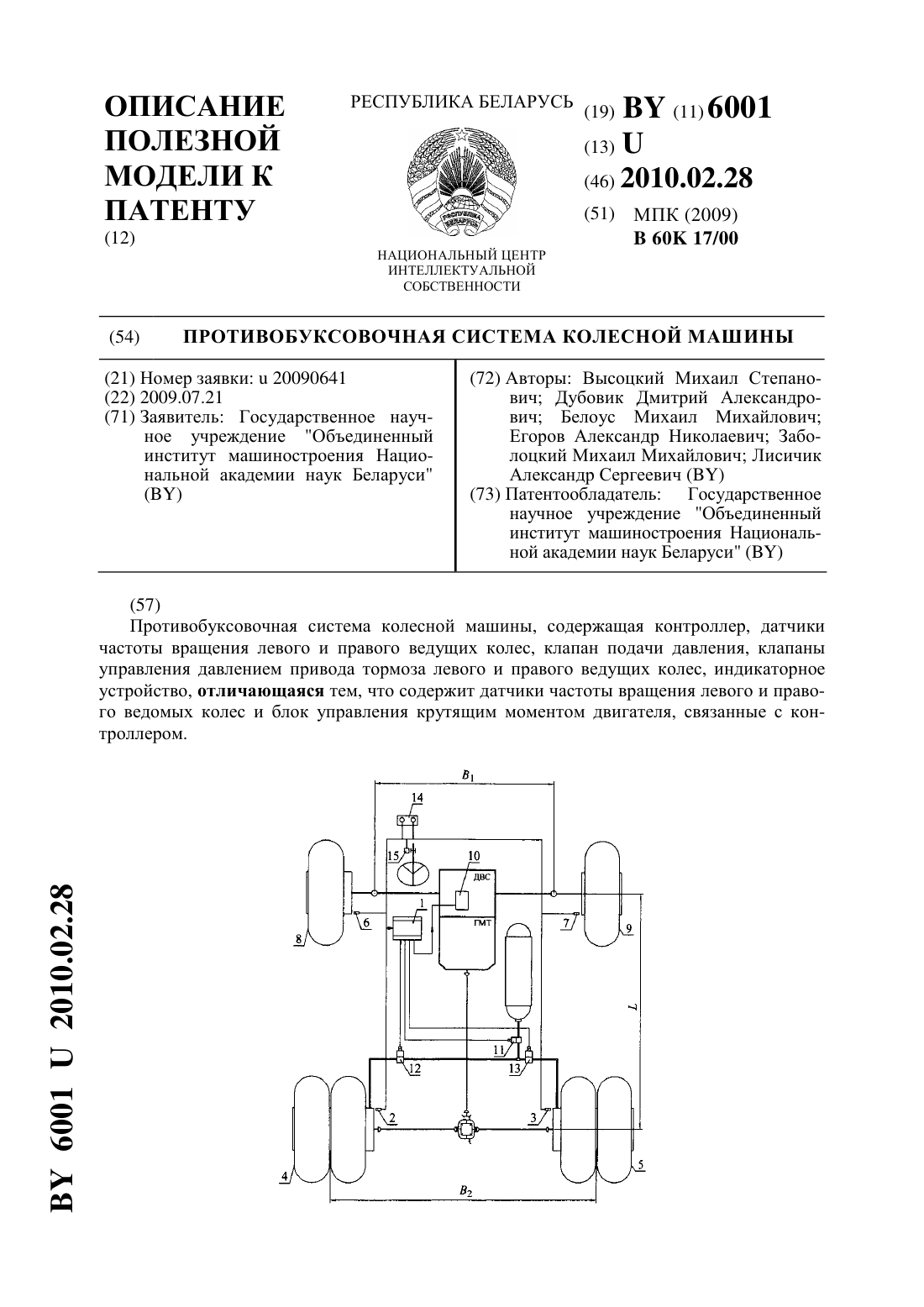
...111 ,111 ,где 1 - поступательная скорость движения левого ведомого колеса 8 1 - радиус качения левого колеса 8 в ведомом режиме 1 - частота вращения левого ведомого колеса 8 по показаниям датчика 6 частоты вращения левого ведомого колеса 1 - поступательная скорость движения правого ведомого колеса 9 1 - радиус качения правого колеса 9 в ведомом режиме 1 - частота вращения правого ведомого колеса 9 по показаниям датчика 7 частоты вращения...
Система управления блокировками дифференциалов колесной машины
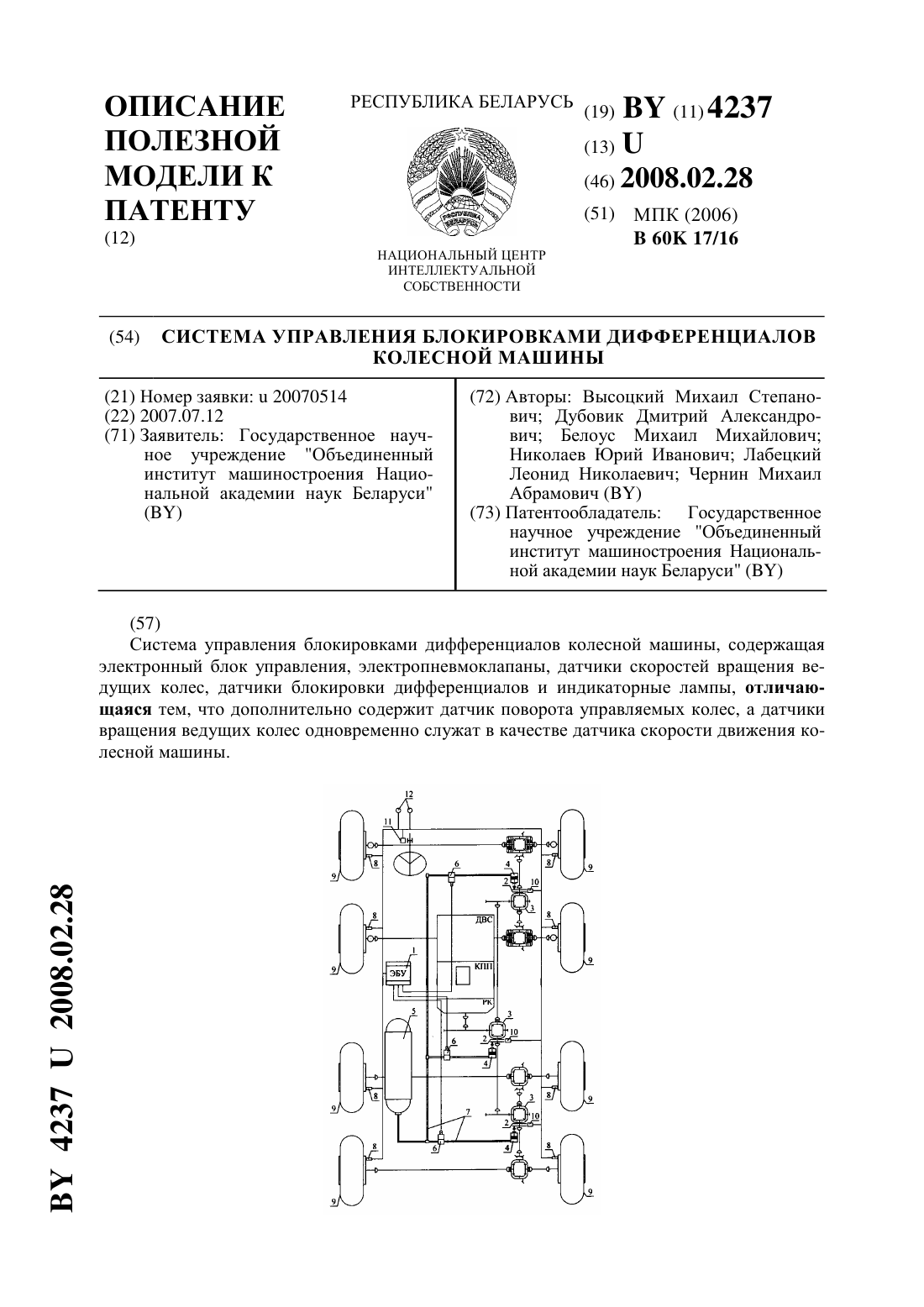
Номер патента: U 4237
Опубликовано: 28.02.2008
Авторы: Чернин Михаил Абрамович, Дубовик Дмитрий Александрович, Высоцкий Михаил Степанович, Лабецкий Леонид Николаевич, Белоус Михаил Михайлович, Николаев Юрий Иванович
МПК: B60K 17/16
Метки: машины, колесной, дифференциалов, система, управления, блокировками
Текст:
...разблокирования дифференциалов. Предлагаемая полезная модель направлена на решение задачи улучшения управляемости колесной машины за счет разблокирования дифференциалов при достижении текущих значений углов поворота управляемых колес или же рулевого колеса пороговых величин. Решение поставленной задачи достигается тем, что система управления блокировками дифференциалов колесных машин содержит электронный блок управления,...
Предыдущий патент: Способ и устройство для производства электрической энергии на газо- и паротурбинной электростанции
Следующий патент: Способ комбинированного теплового неразрушающего контроля движущегося нагретого тела
Случайный патент: Способ получения водорастворимых сложных эфиров метилолцеллюлозы и моно- и дикарбоновых кислот