Способ оценки рассогласования кинематических параметров поворота управляемых колес мобильной машины
Текст
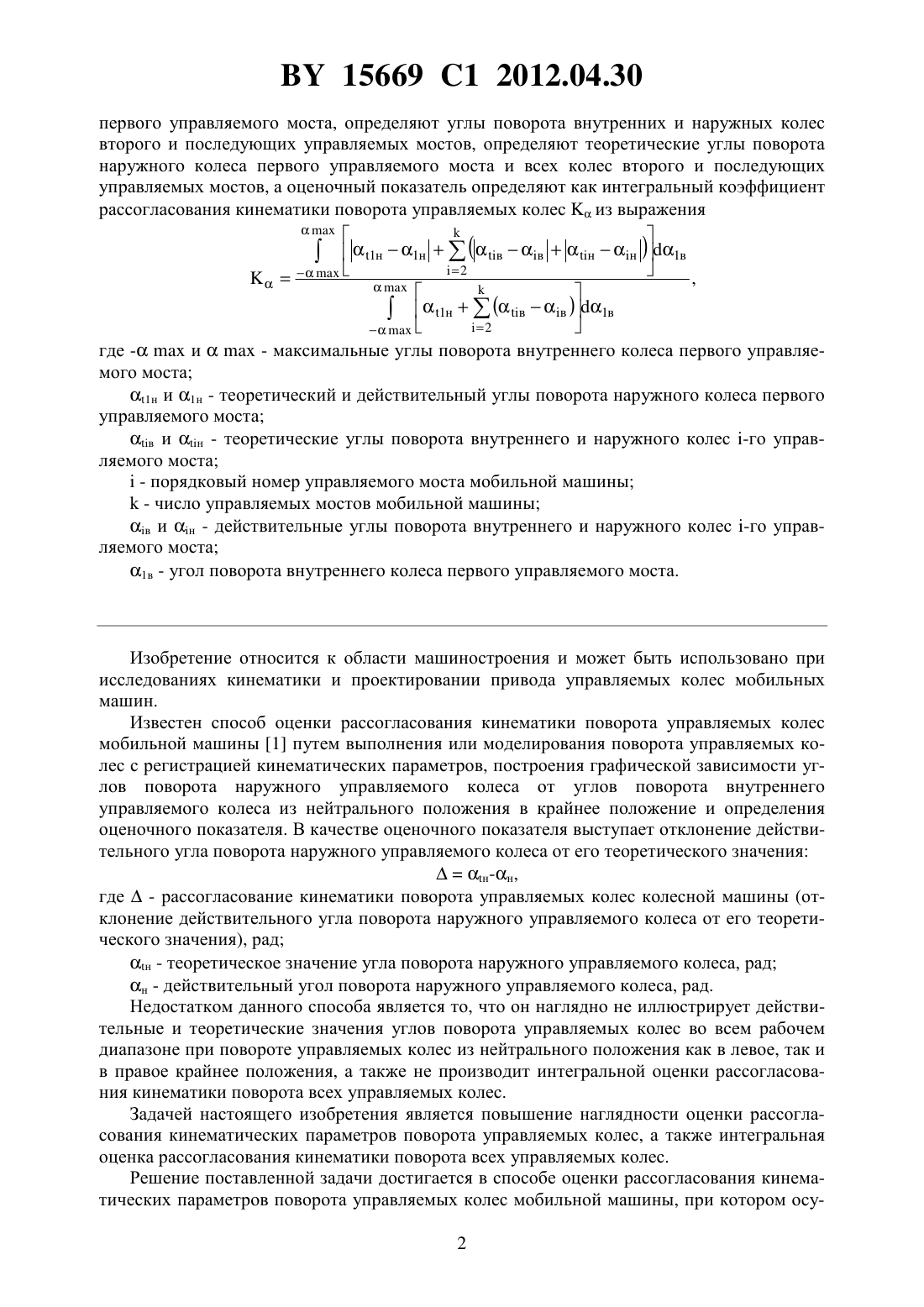
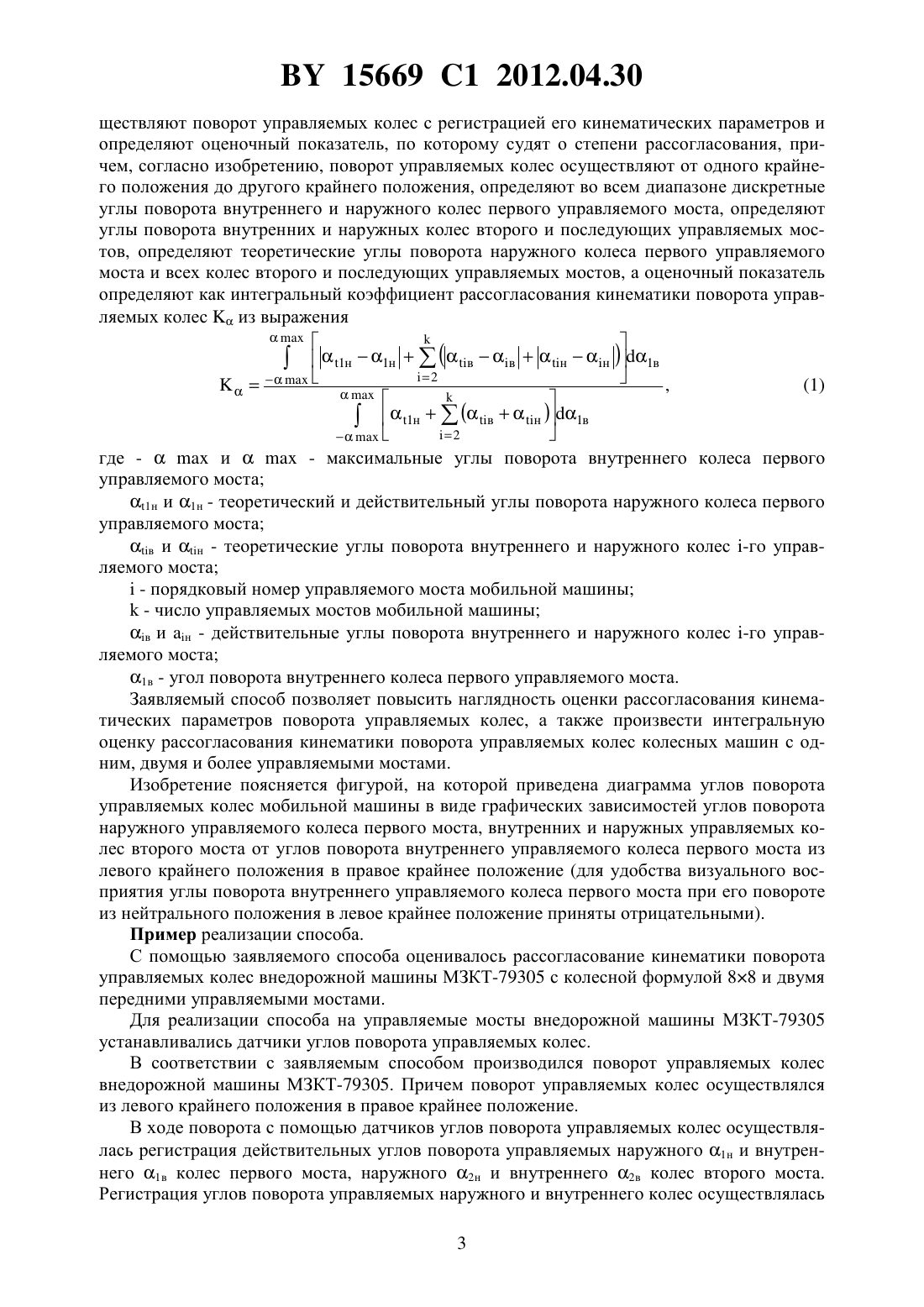
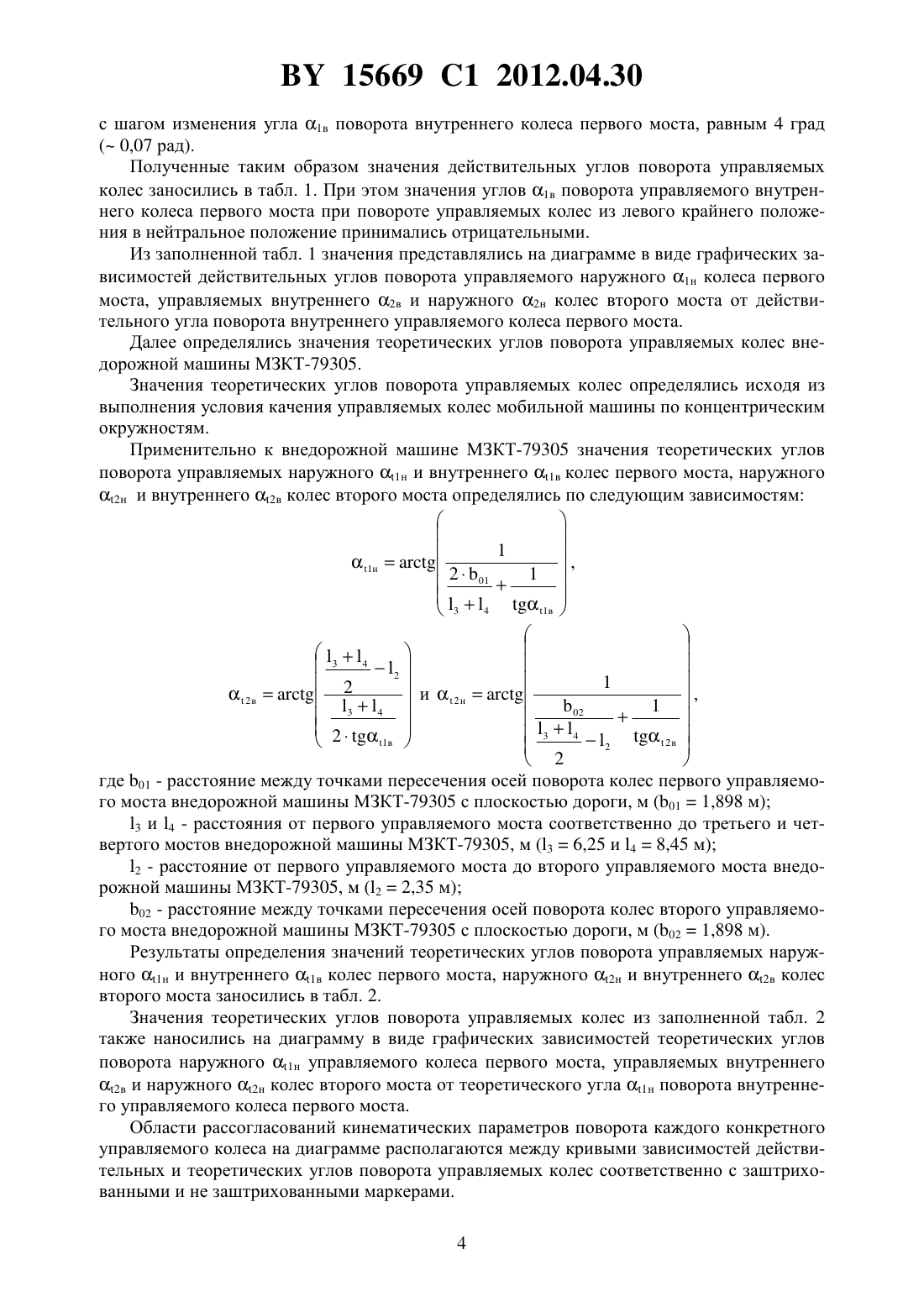
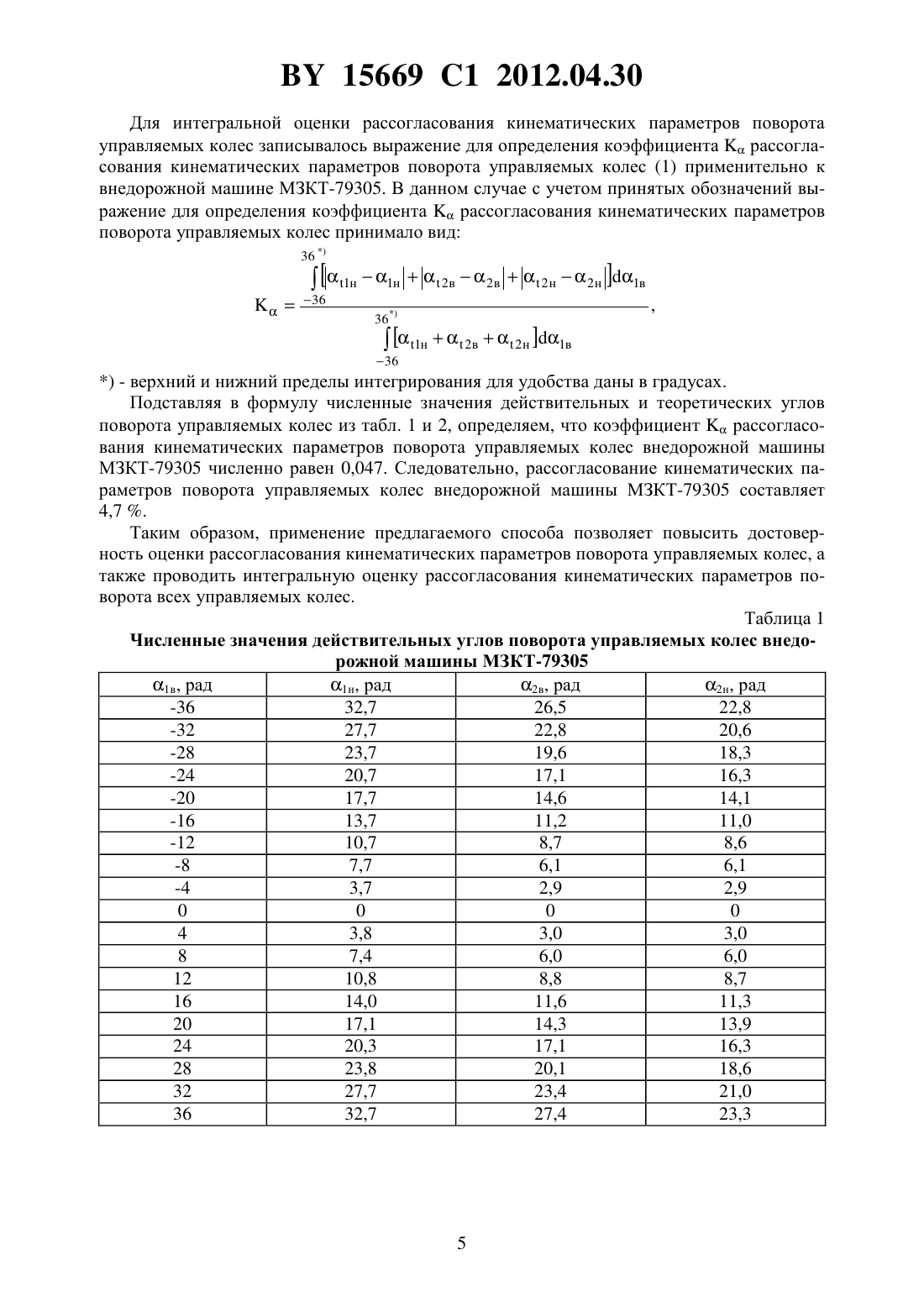
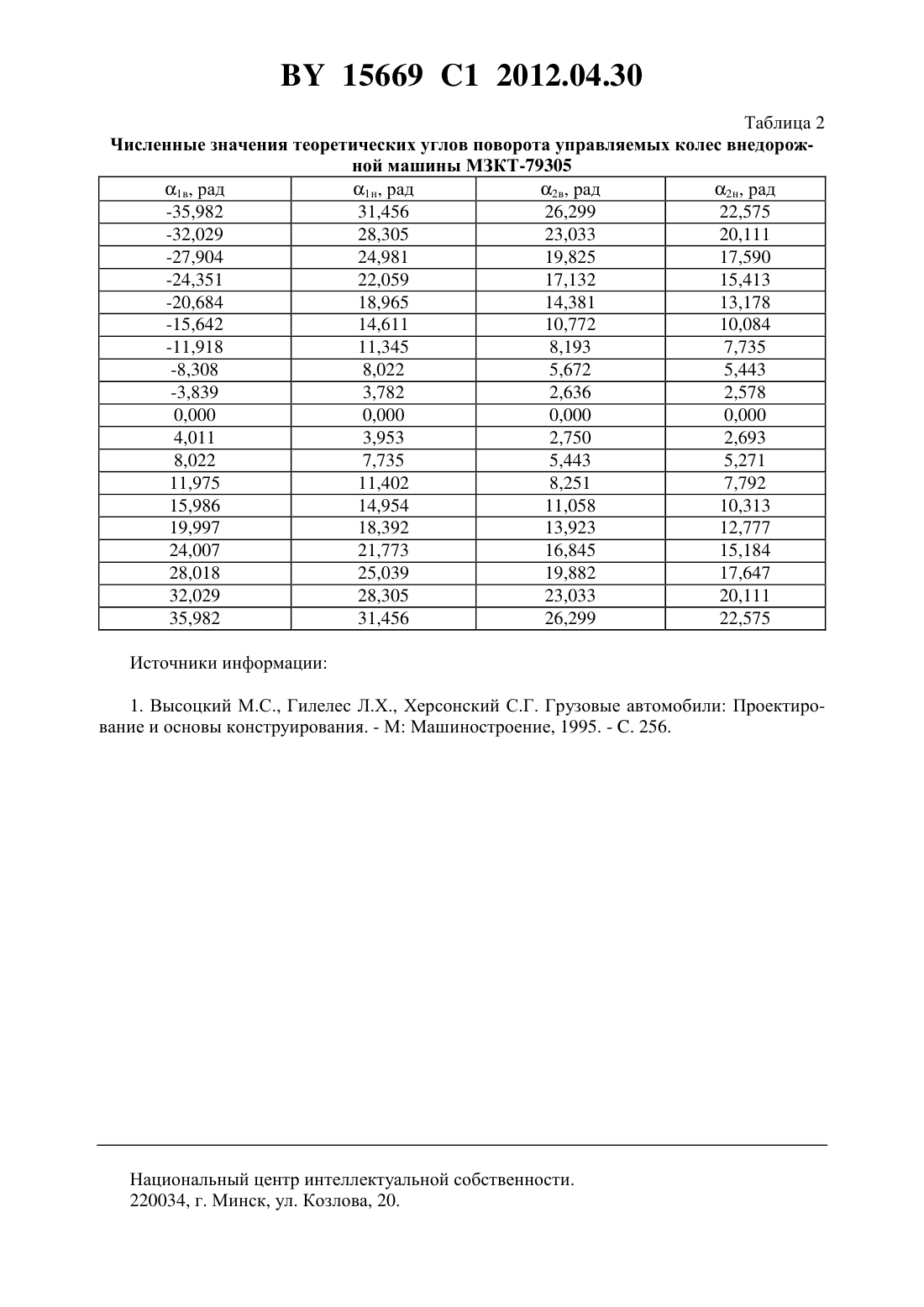
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОЦЕНКИ РАССОГЛАСОВАНИЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Автор Дубовик Дмитрий Александрович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(56) САЗОНОВ И.С. и др. Вестник Белорусско-Российского ун-та. - 2008.3. - С. 40-48. ВЫСОЦКИЙ М.С. и др. Грузовые автомобили Проектирование и основы конструирования. - М Машиностроение, 1995. - С. 256.8385 1, 2006.2121141 1, 1998.2266530 1, 2005.563592, 1977.0124258 2, 1984.19622687 1, 1996.(57) Способ оценки рассогласования кинематических параметров поворота управляемых колес мобильной машины, при котором осуществляют поворот управляемых колес с регистрацией его кинематических параметров и определяют оценочный показатель, по которому судят о степени рассогласования, отличающийся тем, что поворот управляемых колес осуществляют от одного крайнего положения до другого крайнего положения, определяют во всем диапазоне дискретные углы поворота внутреннего и наружного колес 15669 1 2012.04.30 первого управляемого моста, определяют углы поворота внутренних и наружных колес второго и последующих управляемых мостов, определяют теоретические углы поворота наружного колеса первого управляемого моста и всех колес второго и последующих управляемых мостов, а оценочный показатель определяют как интегральный коэффициент рассогласования кинематики поворота управляемых колесиз выражения где -и- максимальные углы поворота внутреннего колеса первого управляемого моста 1 н и 1 н - теоретический и действительный углы поворота наружного колеса первого управляемого моста в и н - теоретические углы поворота внутреннего и наружного колес -го управляемого моста- порядковый номер управляемого моста мобильной машины- число управляемых мостов мобильной машины в и н - действительные углы поворота внутреннего и наружного колес -го управляемого моста 1 в - угол поворота внутреннего колеса первого управляемого моста. Изобретение относится к области машиностроения и может быть использовано при исследованиях кинематики и проектировании привода управляемых колес мобильных машин. Известен способ оценки рассогласования кинематики поворота управляемых колес мобильной машины 1 путем выполнения или моделирования поворота управляемых колес с регистрацией кинематических параметров, построения графической зависимости углов поворота наружного управляемого колеса от углов поворота внутреннего управляемого колеса из нейтрального положения в крайнее положение и определения оценочного показателя. В качестве оценочного показателя выступает отклонение действительного угла поворота наружного управляемого колеса от его теоретического значениян-н,где- рассогласование кинематики поворота управляемых колес колесной машины (отклонение действительного угла поворота наружного управляемого колеса от его теоретического значения), рад н - теоретическое значение угла поворота наружного управляемого колеса, рад н - действительный угол поворота наружного управляемого колеса, рад. Недостатком данного способа является то, что он наглядно не иллюстрирует действительные и теоретические значения углов поворота управляемых колес во всем рабочем диапазоне при повороте управляемых колес из нейтрального положения как в левое, так и в правое крайнее положения, а также не производит интегральной оценки рассогласования кинематики поворота всех управляемых колес. Задачей настоящего изобретения является повышение наглядности оценки рассогласования кинематических параметров поворота управляемых колес, а также интегральная оценка рассогласования кинематики поворота всех управляемых колес. Решение поставленной задачи достигается в способе оценки рассогласования кинематических параметров поворота управляемых колес мобильной машины, при котором осу 2 15669 1 2012.04.30 ществляют поворот управляемых колес с регистрацией его кинематических параметров и определяют оценочный показатель, по которому судят о степени рассогласования, причем, согласно изобретению, поворот управляемых колес осуществляют от одного крайнего положения до другого крайнего положения, определяют во всем диапазоне дискретные углы поворота внутреннего и наружного колес первого управляемого моста, определяют углы поворота внутренних и наружных колес второго и последующих управляемых мостов, определяют теоретические углы поворота наружного колеса первого управляемого моста и всех колес второго и последующих управляемых мостов, а оценочный показатель определяют как интегральный коэффициент рассогласования кинематики поворота управляемых колесиз выражения где -и- максимальные углы поворота внутреннего колеса первого управляемого моста 1 н и 1 н - теоретический и действительный углы поворота наружного колеса первого управляемого моста в и н - теоретические углы поворота внутреннего и наружного колес -г управляемого моста- порядковый номер управляемого моста мобильной машины- число управляемых мостов мобильной машины в и н - действительные углы поворота внутреннего и наружного колес -го управляемого моста 1 в - угол поворота внутреннего колеса первого управляемого моста. Заявляемый способ позволяет повысить наглядность оценки рассогласования кинематических параметров поворота управляемых колес, а также произвести интегральную оценку рассогласования кинематики поворота управляемых колес колесных машин с одним, двумя и более управляемыми мостами. Изобретение поясняется фигурой, на которой приведена диаграмма углов поворота управляемых колес мобильной машины в виде графических зависимостей углов поворота наружного управляемого колеса первого моста, внутренних и наружных управляемых колес второго моста от углов поворота внутреннего управляемого колеса первого моста из левого крайнего положения в правое крайнее положение (для удобства визуального восприятия углы поворота внутреннего управляемого колеса первого моста при его повороте из нейтрального положения в левое крайнее положение приняты отрицательными). Пример реализации способа. С помощью заявляемого способа оценивалось рассогласование кинематики поворота управляемых колес внедорожной машины МЗКТ-79305 с колесной формулой 88 и двумя передними управляемыми мостами. Для реализации способа на управляемые мосты внедорожной машины МЗКТ-79305 устанавливались датчики углов поворота управляемых колес. В соответствии с заявляемым способом производился поворот управляемых колес внедорожной машины МЗКТ-79305. Причем поворот управляемых колес осуществлялся из левого крайнего положения в правое крайнее положение. В ходе поворота с помощью датчиков углов поворота управляемых колес осуществлялась регистрация действительных углов поворота управляемых наружного 1 н и внутреннего 1 в колес первого моста, наружного 2 н и внутреннего 2 в колес второго моста. Регистрация углов поворота управляемых наружного и внутреннего колес осуществлялась 3 15669 1 2012.04.30 с шагом изменения угла 1 в поворота внутреннего колеса первого моста, равным 4 град( 0,07 рад). Полученные таким образом значения действительных углов поворота управляемых колес заносились в табл. 1. При этом значения углов 1 в поворота управляемого внутреннего колеса первого моста при повороте управляемых колес из левого крайнего положения в нейтральное положение принимались отрицательными. Из заполненной табл. 1 значения представлялись на диаграмме в виде графических зависимостей действительных углов поворота управляемого наружного 1 н колеса первого моста, управляемых внутреннего 2 в и наружного 2 н колес второго моста от действительного угла поворота внутреннего управляемого колеса первого моста. Далее определялись значения теоретических углов поворота управляемых колес внедорожной машины МЗКТ-79305. Значения теоретических углов поворота управляемых колес определялись исходя из выполнения условия качения управляемых колес мобильной машины по концентрическим окружностям. Применительно к внедорожной машине МЗКТ-79305 значения теоретических углов поворота управляемых наружного 1 н и внутреннего 1 в колес первого моста, наружного 2 н и внутреннего 2 в колес второго моста определялись по следующим зависимостям 2 где 01 - расстояние между точками пересечения осей поворота колес первого управляемого моста внедорожной машины МЗКТ-79305 с плоскостью дороги, м (011,898 м) 3 и 4 - расстояния от первого управляемого моста соответственно до третьего и четвертого мостов внедорожной машины МЗКТ-79305, м (36,25 и 48,45 м) 2 - расстояние от первого управляемого моста до второго управляемого моста внедорожной машины МЗКТ-79305, м (22,35 м) 02 - расстояние между точками пересечения осей поворота колес второго управляемого моста внедорожной машины МЗКТ-79305 с плоскостью дороги, м (021,898 м). Результаты определения значений теоретических углов поворота управляемых наружного 1 н и внутреннего 1 в колес первого моста, наружного 2 н и внутреннего 2 в колес второго моста заносились в табл. 2. Значения теоретических углов поворота управляемых колес из заполненной табл. 2 также наносились на диаграмму в виде графических зависимостей теоретических углов поворота наружного 1 н управляемого колеса первого моста, управляемых внутреннего 2 в и наружного 2 н колес второго моста от теоретического угла 1 н поворота внутреннего управляемого колеса первого моста. Области рассогласований кинематических параметров поворота каждого конкретного управляемого колеса на диаграмме располагаются между кривыми зависимостей действительных и теоретических углов поворота управляемых колес соответственно с заштрихованными и не заштрихованными маркерами. 4 15669 1 2012.04.30 Для интегральной оценки рассогласования кинематических параметров поворота управляемых колес записывалось выражение для определения коэффициентарассогласования кинематических параметров поворота управляемых колес (1) применительно к внедорожной машине МЗКТ-79305. В данном случае с учетом принятых обозначений выражение для определения коэффициентарассогласования кинематических параметров поворота управляемых колес принимало вид 36 )) - верхний и нижний пределы интегрирования для удобства даны в градусах. Подставляя в формулу численные значения действительных и теоретических углов поворота управляемых колес из табл. 1 и 2, определяем, что коэффициентрассогласования кинематических параметров поворота управляемых колес внедорожной машины МЗКТ-79305 численно равен 0,047. Следовательно, рассогласование кинематических параметров поворота управляемых колес внедорожной машины МЗКТ-79305 составляет 4,7 . Таким образом, применение предлагаемого способа позволяет повысить достоверность оценки рассогласования кинематических параметров поворота управляемых колес, а также проводить интегральную оценку рассогласования кинематических параметров поворота всех управляемых колес. Таблица 1 Численные значения действительных углов поворота управляемых колес внедорожной машины МЗКТ-79305 1 в, рад 1 н, рад 2 в, рад 2 н, рад 15669 1 2012.04.30 Таблица 2 Численные значения теоретических углов поворота управляемых колес внедорожной машины МЗКТ-79305 1 в, рад 1 н, рад 2 в, рад 2 н, рад 1. Высоцкий М.С., Гилелес Л.Х., Херсонский С.Г. Грузовые автомобили Проектирование и основы конструирования. - М Машиностроение, 1995. - . 256. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01M 17/06
Метки: машины, управляемых, оценки, мобильной, рассогласования, кинематических, колес, поворота, параметров, способ
Код ссылки
<a href="https://by.patents.su/6-15669-sposob-ocenki-rassoglasovaniya-kinematicheskih-parametrov-povorota-upravlyaemyh-koles-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Способ оценки рассогласования кинематических параметров поворота управляемых колес мобильной машины</a>
Устройство для изменения положения управляемых колес при криволинейном движении

Номер патента: U 5331
Опубликовано: 30.06.2009
Авторы: Бобровник Александр Иванович, Шматко Сергей Борисович, Дивин Кирилл Иванович, Стасилевич Андрей Григорьевич
МПК: B62D 7/00
Метки: изменения, движении, устройство, положения, криволинейном, управляемых, колес
Текст:
...трапеции описывается уравнением (2) 3 где- длина бокового рычага- угол наклона бокового рычага- длина поперечной тяги. При выборе параметров рулевой трапеции необходимо обеспечить минимально возможную разницу между теоретическим (по выражению 1) и фактическим (по выражению 2) углами поворота управляемых колес при максимальном углеповорота внутреннего управляемого колеса по отношению к центру поворота. Для современных отечественных тракторов,...
Устройство для изменения положения управляемых ведущих колес с возможностью их реагирования по частоте вращения

Номер патента: U 6781
Опубликовано: 30.12.2010
Авторы: Бобровник Александр Иванович, Дивин Кирилл Иванович
МПК: B62D 7/00
Метки: устройство, возможностью, реагирования, изменения, колес, управляемых, ведущих, частоте, положения, вращения
Текст:
...и направления вращения рулевого колеса, электронного блока, пропорционального регулятора расхода с электромагнитами, а также масляного насоса, гидроцилиндров и датчиков угла поворота колес 2. Недостатком известного устройства является нечувствительность системы при смещении линии тяги, что приводит к изменению траектории движения агрегата. Задачей полезной модели является улучшение управляемости агрегата при криволинейном движении трактора...
Устройство для изменения положения управляемых колес при криволинейном движении с системой аварийной сигнализации
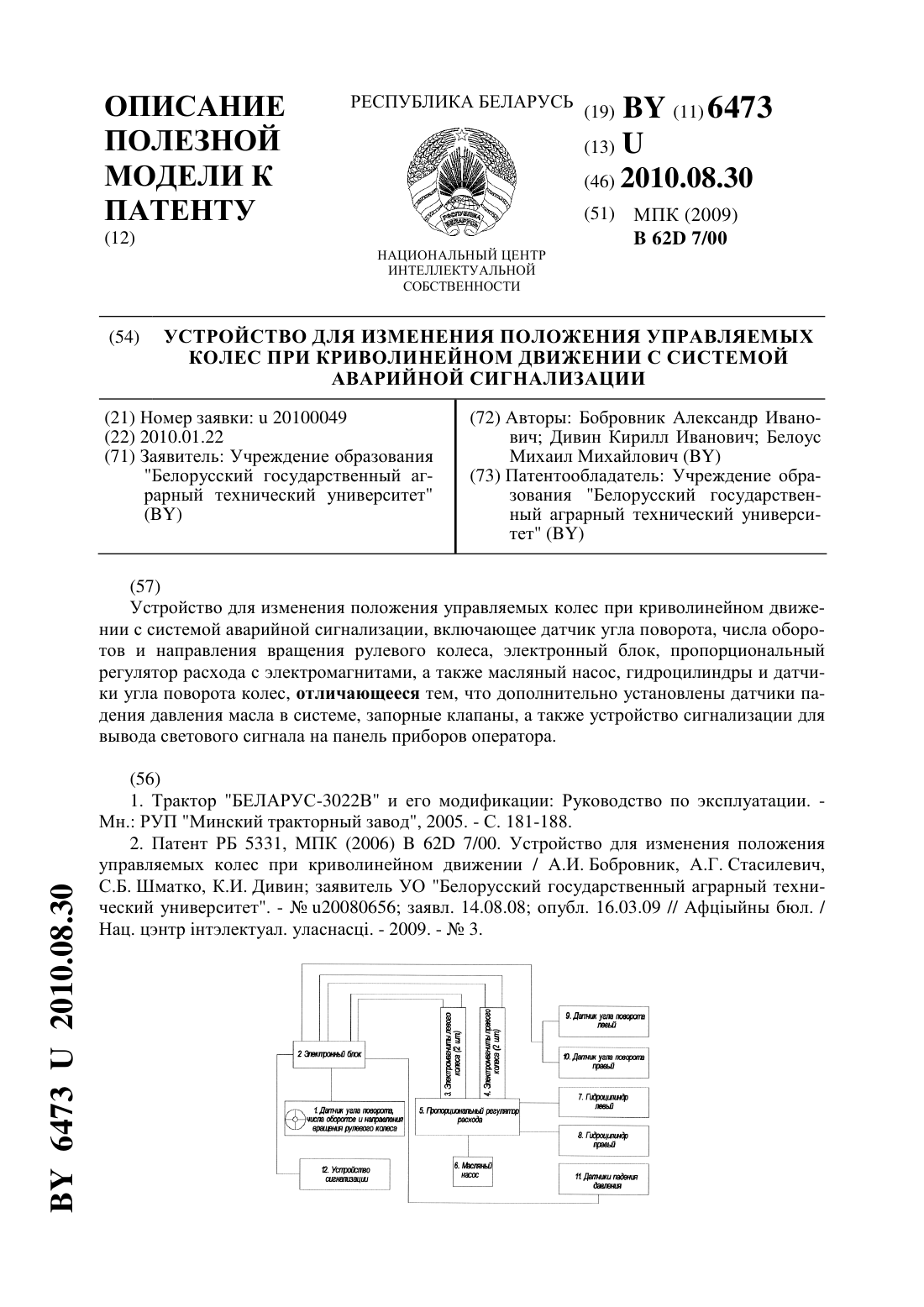
Номер патента: U 6473
Опубликовано: 30.08.2010
Авторы: Дивин Кирилл Иванович, Бобровник Александр Иванович, Белоус Михаил Михайлович
МПК: B62D 7/00
Метки: управляемых, криволинейном, изменения, системой, сигнализации, аварийной, движении, положения, колес, устройство
Текст:
...колеса- угол поворота внутреннего колеса- шкворневая колея машины- база машины. Ближайшим техническим решением (прототипом) является устройство, состоящее из датчика угла поворота, числа оборотов и направления вращения рулевого колеса, электронного блока, пропорционального регулятора расхода с электромагнитами, а также масляного насоса, гидроцилиндров и датчиков угла поворота колес 2. К недостаткам известного устройства относится...
Способ оценки эффективности ходовых систем колесных машин
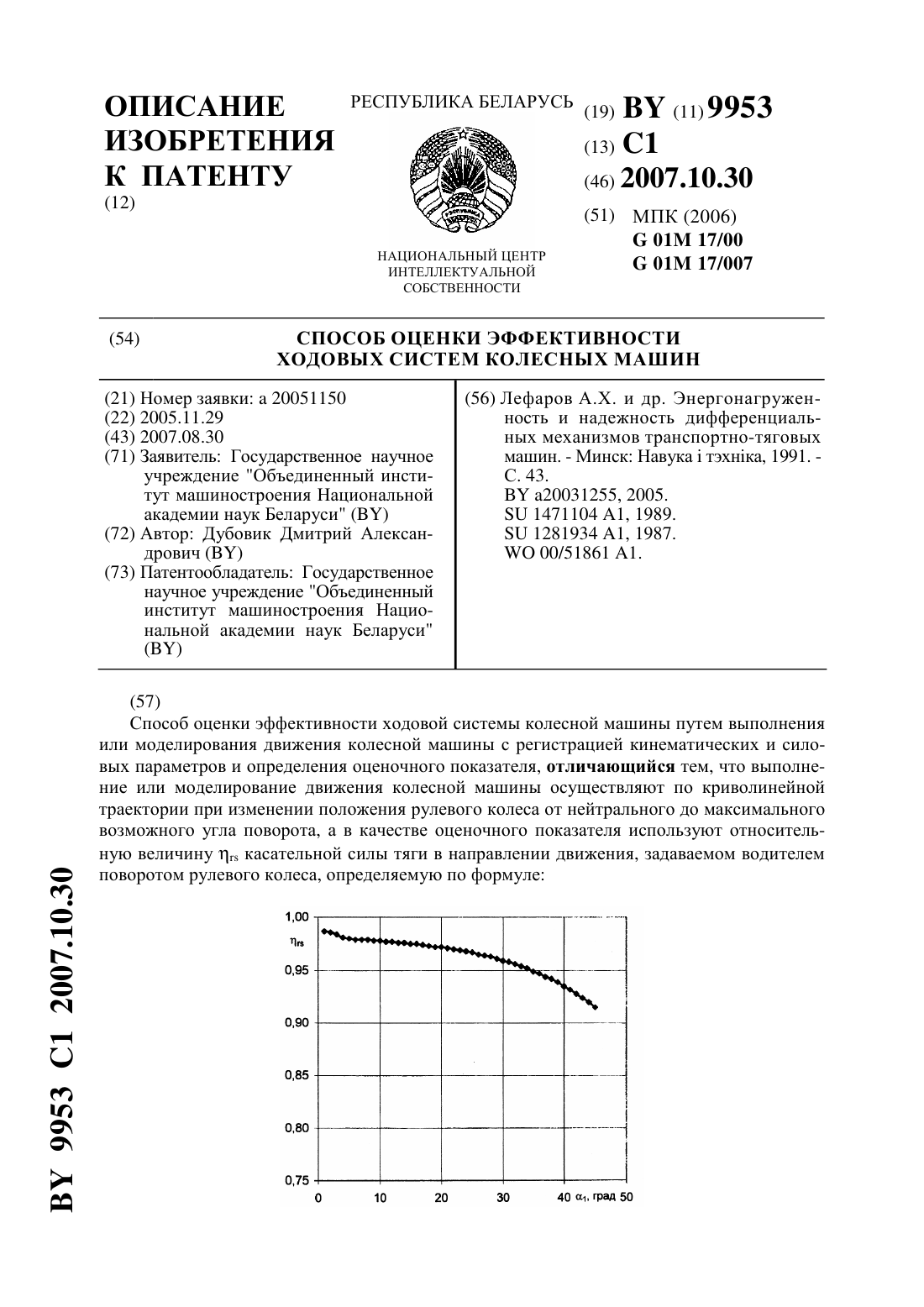
Номер патента: 9953
Опубликовано: 30.10.2007
Автор: Дубовик Дмитрий Александрович
МПК: G01M 17/007, G01M 17/00
Метки: ходовых, способ, колесных, машин, эффективности, оценки, систем
Текст:
...силы тяги на ведущих колесах -го моста, Н/и- буксования ведущих колес -го моста. Данный способ позволяет оценить энергетическую эффективность ходовых систем колесных машин с позиции выполнения ими как тяговых, так и транспортных работ, или же при совмещении последних. Недостатком этого способа является то, что он не учитывает потери мощности, обусловленные несовершенством конструкции ходовых систем и связанные с отклонением...
Способ управления дифференциалами многоприводной колесной машины
Номер патента: 15148
Опубликовано: 30.12.2011
Авторы: Мыльников Евгений Витальевич, Белоус Михаил Михайлович, Высоцкий Михаил Степанович, Дубовик Дмитрий Александрович
МПК: G01M 17/00, B60K 17/16
Метки: способ, управления, машины, многоприводной, колесной, дифференциалами
Текст:
...условиями. Изобретение поясняется фигурами. На фиг. 1 представлены графические зависимости коэффициентов буксований ведущих колес внедорожной машины МЗКТ-79091 с простым дифференциальным приводом ведущих колес от времени движения по опорной поверхности удовлетворительного состояния с участками с плохими дорожно-сцепными условиями. На фиг. 2 представлены графические зависимости коэффициентов буксований ведущих колес внедорожной машины...
Предыдущий патент: Способ элиминационного лечения генитальной папилломавирусной инфекции
Следующий патент: Способ и устройство для производства электрической энергии на газо- и паротурбинной электростанции
Случайный патент: Универсальный шарнир