Система управления тяговыми электродвигателями вагонов метрополитена
Номер патента: U 8675
Опубликовано: 30.10.2012
Авторы: Вавилов Евгений Николаевич, Бочкарев Александр Васильевич, Бондаренко Вячеслав Игоревич, Азимов Узген Мадаминович
Текст
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА УПРАВЛЕНИЯ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ ВАГОНОВ МЕТРОПОЛИТЕНА(71) Заявители Азимов Узген Мадаминович Бочкарев Александр Васильевич Вавилов Евгений Николаевич Бондаренко Вячеслав Игоревич(72) Авторы Азимов Узген Мадаминович Бочкарев Александр Васильевич Вавилов Евгений Николаевич Бондаренко Вячеслав Игоревич(73) Патентообладатели Азимов Узген Мадаминович Бочкарев Александр Васильевич Вавилов Евгений Николаевич Бондаренко Вячеслав Игоревич(57) Система управления тяговыми электродвигателями вагонов метрополитена, содержащая датчики тока и напряжения, отличающаяся тем, что имеет в своем составе первый датчик тока, используемый для осуществления контроля номинальных и аварийных токов в первой группе тяговых электродвигателей и предназначенный для установки последовательно с тяговыми электродвигателями первой группы двигателей второй датчик тока, используемый для осуществления контроля номинальных и аварийных токов второй группы тяговых электродвигателей, предназначенный для установки последовательно с тяговыми электродвигателями второй группы двигателей 86752012.10.30 третий датчик тока, используемый для контроля за превышением максимально допустимого тока возбуждения тяговых электродвигателей и предназначенный для подсоединения к первому регулятору тока возбуждения четвертый датчик тока, используемый для контроля за величиной тока электродвигателя в режиме торможения вагона, предназначенный для установки в цепь динамического торможения тяговых электродвигателей датчик напряжения, используемый для осуществления контроля за величиной аварийного напряжения в цепи якорей тяговых электродвигателей, предназначенный для установки в цепь якорей тяговых двигателей второй группы двигателей,программируемый логический контроллер, соединенный с аналого-цифровым преобразователем, с которым соединены информационные выходы датчика напряжения и датчиков тока, в качестве которых использованы датчики Холла при этом программируемый логический контроллер выполнен с возможностью программного управления шаговым двигателем, обеспечивающим движение реостатного контроллера, используемого для изменения сопротивления цепи тяговых электродвигателей в процессе пуска, разгона и электродинамического торможения вагона.(56) 1. Акционерное общество МЕТРОВАГОНМАШ. Силовая схема электрических цепей тягового электропривода. Руководство по эксплуатации вагонов метрополитена моделей 81-717.5 и 81-714.5. - М. Транспорт, 1993. - С. 193, рис. 8.5. Полезная модель относится к электрическим системам управления тяговыми электродвигателями вагонов метрополитена и является функциональной частью принципиальной электрической схемы вагона. Заявляется общая система управления тяговыми электродвигателями вагонов метрополитена и описываются ее функциональные части (подсистемы) система защиты и контроля тяговых двигателей и система контроля тока тяговых электродвигателей в режиме динамического торможения. В качестве прототипа выбрана система управления тяговыми электродвигателями вагонов метрополитена 1. В этой схеме применены контактные аппараты коммутации и контроля, такие как реостатный контроллер (типа ЭКГ-39) с набором силовых контактов РК 1-РК 26 (типа КЭ-47) и сервоприводом СДРК (типа ПЛ-072 Г), выполняющий функцию одного из основных коммутирующих устройств якорных цепей тяговых электродвигателей реле ускорения и торможения РУТ (типа Р-52 Б), которое используется для контроля величин пусковых и тормозных токов в цепях тяговых электродвигателей с формированием уставок их ограничения с учетом режима работы силовой схемы вагона и его загрузки реле перегрузки РП (типа РМ-3001) с группой реле тока, которое используется для контроля величины аварийных токов в цепях тяговых электродвигателей (функция РП 1-3,РП 2-4, РПЛ), контроля тока в цепи обмоток возбуждения тяговых электродвигателей(функция РЗ-3), а также наличия аварийного напряжения в якорной цепи в тормозном режиме (функция РЗ-1) реле контроля тормозного тока РКТТ (типа Р-52 Б), которое осуществляет контроль величины тока тяговых двигателей в режиме электродинамического торможения контакты реле включены в последовательную цепь контроля электродинамического торможения вагонов поезда, которая воздействует на устройства поездной автоматики реле тока РТ 2 (типа РЭВ-830), которое осуществляет контроль величины тока тяговых двигателей в режиме электродинамического торможения и при снижении тока тормозного контура осуществляет включение вентиля замещения пневматического тормоза. 2 86752012.10.30 Используемые в схеме электромагнитные реле срабатывают при достижении пороговых величин пусковых и тормозных токов и переключают элементы схемы управления вагоном. Основным недостатком работы схемы является погрешность срабатывания электромагнитных реле, вызываемая износом опорных узлов якорей реле. Кроме того, погрешность срабатывания обуславливается ручной механической настройкой, что приводит к нарушению режимов управления процессом ввода-вывода токоограничивающих резисторов цепи тяговых электродвигателей. Для вагонов, оборудованных тяговыми двигателями типа ДК-116, превышение граничных уставок пусковых и тормозных токов в большинстве случаев вызывает круговой огонь по коллектору двигателя, особенно в режиме работы в зоне ослабления поля. Реостатный контроллер предназначен для изменения сопротивления цепи тяговых электродвигателей в процессе пуска, разгона и электродинамического торможения вагона. Движение вала реостатного контроллера обеспечивается сервоприводом, в состав которого входит электродвигатель постоянного тока (типа ПЛ-072 Г). Усилие от двигателя на кулачковый вал реостатного контроллера передается через двухступенчатый червячный редуктор и соединительную муфту. В вагонах серии Е на валу червячного редуктора установлен дисковый электромагнитный тормоз. Задача сервопривода - обеспечение вращения и точной остановки вала реостатного контроллера в заданных позициях под воздействием элементов общей схемы управления. В процессе интенсивной эксплуатации механические элементы привода, передающие вращение валу реостатного контроллера, изнашиваются, появляются люфты, влияющие на снижение точности остановки вала в заданной позиции. Это, в свою очередь, существенно отражается на процессе коммутации, дополнительно сокращает срок службы контактов силовых цепей РК 1-РК 26 реостатного контроллера и, как правило, вызывает появление аварийных токов в цепях тяговых двигателей и их перегрузку. В основу полезной модели поставлена задача расширения арсенала средств и создание новой, надежной в эксплуатации системы управления тяговыми электродвигателями вагонов метрополитена и входящих в нее подсистем. Достигаемый технический результат обеспечение точной остановки вала реостатного контроллера в заданной позиции за счет возможности применения шагового двигателя, точно позиционируемого программируемой электронной схемой управления. Поставленная задача решается тем, что система управления тяговыми электродвигателями вагонов метрополитена содержит датчики тока и напряжения и от прототипа отличается тем, что имеет в своем составе первый датчик тока, используемый для осуществления контроля номинальных и аварийных токов в первой группе тяговых электродвигателей и предназначенный для установки последовательно с тяговыми электродвигателями первой группы двигателей второй датчик тока, используемый для осуществления контроля номинальных и аварийных токов второй группы тяговых электродвигателей, предназначенный для установки последовательно с тяговыми электродвигателями второй группы двигателей третий датчик тока, используемый для контроля за превышением максимально допустимого тока возбуждения тяговых электродвигателей и предназначенный для подсоединения к первому регулятору тока возбуждения четвертый датчик тока, используемый для контроля за величиной тока электродвигателя в режиме торможения вагона, предназначенный для установки в цепь динамического торможения тяговых электродвигателей датчик напряжения, используемый для осуществления контроля за величиной аварийного напряжения в цепи якорей электродвигателей, предназначенный для установки в цепь якорей тяговых электродвигателей второй группы двигателей программируемый логический контроллер, соединенный с аналого-цифровым преобразователем, с которым соединены информационные выходы датчика напряжения и датчиков тока, в качестве которых использованы датчики Холла,3 86752012.10.30 при этом программируемый логический контроллер выполнен с возможностью программного управления шаговым двигателем, обеспечивающим движение вала реостатного контроллера, используемого для изменения сопротивления цепи тяговых электродвигателей в процессе пуска, разгона и электродинамического торможения вагона. Система защиты и контроля тяговых электродвигателей характеризуется тем, что содержит датчики тока и напряжения и имеет в своем составе первый датчик тока, используемый для осуществления контроля номинальных и аварийных токов в первой группе тяговых электродвигателей и предназначенный для установки последовательно с тяговыми электродвигателями первой группы двигателей второй датчик тока, используемый для осуществления контроля номинальных и аварийных токов второй группы тяговых электродвигателей, предназначенный для установки последовательно с тяговыми электродвигателями второй группы двигателей третий датчик тока, используемый для контроля за превышением максимально допустимого тока возбуждения тяговых электродвигателей и предназначенный для подсоединения к первому регулятору тока возбуждения датчик напряжения, используемый для осуществления контроля за величиной аварийного напряжения в цепи якорей электродвигателей, предназначенный для установки в цепь якорей тяговых двигателей второй группы двигателей программируемый логический контроллер, соединенный с аналого-цифровым преобразователем, с которым соединены информационные выходы датчика напряжения и датчиков тока, в качестве которых использованы датчики Холла,при этом программируемый логический контроллер выполнен с возможностью программного управления шаговым двигателем, обеспечивающим движение реостатного контроллера, используемого для изменения сопротивления цепи тяговых электродвигателей в процессе пуска, разгона и электродинамического торможения вагона. Система защиты и контроля тяговых электродвигателей во втором варианте практически совпадает с первым вариантом и в нем используются датчики Холла. Отличие состоит в том, что в нем отсутствует программируемый логический контроллер, соединенный с аналого-цифровым преобразователем. Система контроля тока тяговых электродвигателей в режиме динамического торможения характеризуется тем, что содержит датчик тока, используемый для контроля за величиной тока тяговых электродвигателей в режиме динамического торможения вагона,предназначенный для установки в цепь динамического торможения тяговых электродвигателей, в качестве датчика тока использован датчик Холла, информационный выход которого подсоединен через аналого-цифровой преобразователь к программируемому логическому контроллеру, который выполнен с возможностью программного управления шаговым двигателем, обеспечивающим движение реостатного контроллера, используемого для изменения сопротивления цепи тяговых электродвигателей в процессе пуска, разгона и электродинамического торможения вагона. Система контроля тока тяговых электродвигателей в режиме динамического торможения во втором варианте в целом совпадает с первым вариантом и использует датчик Холла. Отличие состоит в том, что в нем отсутствует программируемый логический контроллер,соединенный с аналого-цифровым преобразователем. Для того чтобы лучше продемонстрировать отличительные особенности полезной модели в качестве примера, не имеющего какого-либо ограничительного характера, используются нижеописаный предпочтительный вариант реализации применительно к вагонам метрополитена моделей 81-717, 81-714 и их модификаций. Пример реализации иллюстрируется фигурой, на которой представлена функциональная схема системы управления тяговыми электродвигателями вагонов метрополитена (в ходовом режиме) и входящие в нее подсистемы (в ходовом режиме). 86752012.10.30 Первый датчик тока 1 (1) установлен последовательно с тяговыми электродвигателями 2, 3 первой группы двигателей, второй датчик тока 4 (2) установлен последовательно с тяговыми электродвигателями 5, 6 второй группы двигателей. Датчики 1, 4 предназначены для осуществления контроля номинальных и аварийных токов в этих группах. Третий датчик тока 7 (3) включен в первый регулятор тока возбуждения 25 и предназначен для контроля за превышением максимально допустимого тока возбуждения тяговых электродвигателей. Четвертый датчик тока 8 (4) установлен в цепь динамического торможения и предназначен для осуществления контроля за величиной тока тяговых электродвигателей в режиме динамического торможения вагона. В качестве датчиков тока (позиции 1, 4, 7, 8) могут быть использованы датчики тока Холла, например 500-/93, производства ООО ТВЕЛЕМ г. Тверь. Датчик напряжения 9 (1), например 100/84 того же производителя, установлен в цепь якорей тяговых двигателей (5, 6) и предназначен для осуществления контроля за величиной аварийного напряжения в цепи якорей этих двигателей. Реостатный контроллер 10 предназначен для изменения сопротивления цепи тяговых электродвигателей в процессе пуска, разгона и электродинамического торможения вагона. Движение вала реостатного контроллера обеспечивается сервоприводом, в качестве которого используется шаговый двигатель 11 (СДРК), например 110150, снабженный блоком управления 12 шаговым двигателем. Параллельно каждому токоограничивающему резистору четырех блоков 13-16 резисторов подключен шунтирующий контакт соответственно четырех блоков 17-20 контактов реостатного контроллера. Блок 16 резисторов включен параллельно с обмотками возбуждения 21, 22 (ОВ 1 и ОВ 3) тяговых электродвигателей 2, 3, блок 14 резисторов - параллельно паре обмоток 23, 24 (ОВ 2 и ОВ 4) тяговых электродвигателей 5, 6 соответственно блок 15 резисторов - последовательно обмоткам возбуждения 21, 22 (ОВ 1 и ОВ 2) тяговых электродвигателей 2, 3, а блок 13 резисторов - последовательно якорной цепи второй группы тяговых электродвигателей 5,6. Параллельно обмоткам возбуждения 23, 24 подключен первый регулятор 25 тока возбуждения, а параллельно обмоткам 21, 22 - второй регулятор 26 тока возбуждения. Регуляторы 25, 26 предназначены для импульсного регулирования среднего значения тока возбуждения тяговых электродвигателей в режиме динамического торможения. Регуляторы 25, 26 тока возбуждения являются элементами функциональной части общей системы управления - системы контроля тока тяговых электродвигателей в режиме динамического торможения (третий объект полезной модели). Третий датчик тока 7 подсоединен к первому регулятору тока 25 и осуществляет контроль тока в обмотках возбуждения 23, 24 тяговых электродвигателей 5, 6 в режиме динамического торможения. Четвертый датчик тока 8 (4) установлен параллельно обмоткам возбуждения 21 и 22 и соответственно второму регулятору 26 тока возбуждения. Информационные выходы датчиков тока 1, 4, 7, 8 и датчика напряжения 9 через АЦП 27 подсоединены к программируемому логическому контроллеру 28, один выход которого подсоединен к блоку управления 12 шаговым двигателем реостатного контроллера 10, а второй - к устройствам поездной автоматики 29 вагона, предназначенным для автоматического регулирования скорости вагона и аварийных отключений силовой схемы вагона при неисправностях электрической схемы и аппаратов. Цепь из последовательно соединенных первого датчика тока 1 группы тяговых электродвигателей 2, 3 последовательно соединенных обмоток возбуждения 21, 22 этих двигателей блоков 15 и 13 токоограничивающих резисторов датчика тока 4 группы тяговых электродвигателей 5, 6 последовательно соединенных обмоток возбуждения 23, 24 этих двигателей подсоединена к токоприемнику 30 и токоотводу 31. 5 86752012.10.30 Система защиты и контроля тяговых электродвигателей включает в себя первый датчик тока 1 (1), установленный последовательно группе тяговых электродвигателей 2, 3 второй датчик тока 4 (2), установленный последовательно группе тяговых электродвигателей 5, 6 третий датчик тока 7 (3), подсоединенный к первому регулятору 25 тока возбуждения, и осуществляет контроль тока в обмотках возбуждения 23, 24 тяговых электродвигателей 5, 6 в режиме динамического торможения датчик напряжения 9 (1) установленный в цепь якорей тяговых электродвигателей (5, 6) и предназначенный для осуществления контроля за величиной аварийного напряжения в цепи якорей этих двигателей. Эта система может быть реализована в отдельном (первом) блоке, заменяющем ящик ЯР-13 вагонов метрополитена. Система контроля тока тяговых электродвигателей в режиме динамического торможения включает в себя датчик тока 8 (4), установленный параллельно обмоткам возбуждения 21 и 22 и соответственно второму регулятору 26 тока возбуждения. Эта система может быть реализована во втором блоке, заменяющем ящик ЯР-27. Общими устройствами для двух вышеописанных систем являются аналого-цифровой преобразователь 27 и программируемый логический контроллер 28. Поэтому при разделении общей системы управления на описанные выше подсистемы (второй и третий объект) возможны варианты реализации, когда аналого-цифровой преобразователь 27 и программируемый логический контроллер 28 смонтированы в первом или втором блоке (аналоге ЯР-13 или аналоге ЯР-27). В ходовом режиме вагона система функционирует следующим образом. Как описано выше, параллельно каждому токоограничивающему резистору четырех блоков 13-16 резисторов подключен шунтирующий контакт соответственно четырех блоков 17-20 контактов реостатного контроллера. Под воздействием программно управляемого (блок управления 12) вал реостатного контроллера 10 начинает вращение и своими контактами шунтирует токоограничивающие резисторы, выводя их из якорной цепи и цепи возбуждения тяговых электродвигателей. Изменение силы тока фиксируется датчиками тока 1, 4, 7, их сигналы поступают на аналого-цифровой преобразователь 27, оцифровываются и поступают в программируемый логический контроллер 28. При превышении тока тяговых двигателей его номинального значения, величина фиксируется датчиками тока 1 и 4, обрабатывается центральным процессором программируемого логического контроллера 28 и сравнивается с программно заданной номинальной уставкой тока. При этом вырабатывается сигнал остановки шагового двигателя реостатного контроллера и прерывается процесс увеличения тока в силовой цепи. В процессе разгона тяговых двигателей величина тока уменьшается. Датчики тока 1 и 4 фиксируют уменьшение величины тока в цепи тяговых электродвигателей. Сигнал обрабатывается центральным процессором программируемого логического контроллера и при снижении текущего значения до величины уставки, заданной программой, вырабатывается команда на включение шагового двигателя 11, которая поступает на блок управления 12 шаговым двигателем, и процесс разгона продолжается. При возникновении неисправностей и короткого замыкания в цепи тяговых электродвигателей датчики тока 1, 4, 7 и датчик напряжения 9 фиксируют аварийные значения токов и напряжения. Соответствующие сигналы с этих датчиков Холла обрабатываются программируемым логическим контроллером 28, сравниваются со значениями программных аварийных уставок и вырабатываются управляющие воздействия на устройства поездной автоматики 29, которые производят аварийное выключение силовой схемы вагона. В режиме динамического торможения контроль за величиной тока осуществляется датчиком тока 8. Сигналы датчика 8 обрабатываются центральным процессором программируемого логического контроллера 28, который формирует управляющее воздействие на устройства поездной автоматики 29 с учетом программных уставок. 86752012.10.30 Таким образом, в полезной модели изменена принципиальная схема, и электромагнитные реле заменены на датчики Холла. Это позволило использовать программно управляемый шаговый двигатель для формирования закона движения вала реостатного контроллера по сигналам обратной связи, формируемым датчиками. Замена электродвигателя с редуктором на шаговый двигатель повышает точность позиционирования вала контроллера, а также точность и надежность управления тяговыми электродвигателями. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: B60L 15/20
Метки: вагонов, тяговыми, метрополитена, электродвигателями, система, управления
Код ссылки
<a href="https://by.patents.su/7-u8675-sistema-upravleniya-tyagovymi-elektrodvigatelyami-vagonov-metropolitena.html" rel="bookmark" title="База патентов Беларуси">Система управления тяговыми электродвигателями вагонов метрополитена</a>
Система управления тяговым электродвигателем троллейбуса
Номер патента: 10061
Опубликовано: 30.12.2007
Авторы: Галямов Павел Маратович, Альгин Владимир Борисович, Ярусов Анатолий Григорьевич, Дзюбенко Олег Анатольевич
МПК: B60L 15/20
Метки: управления, тяговым, троллейбуса, система, электродвигателем
Текст:
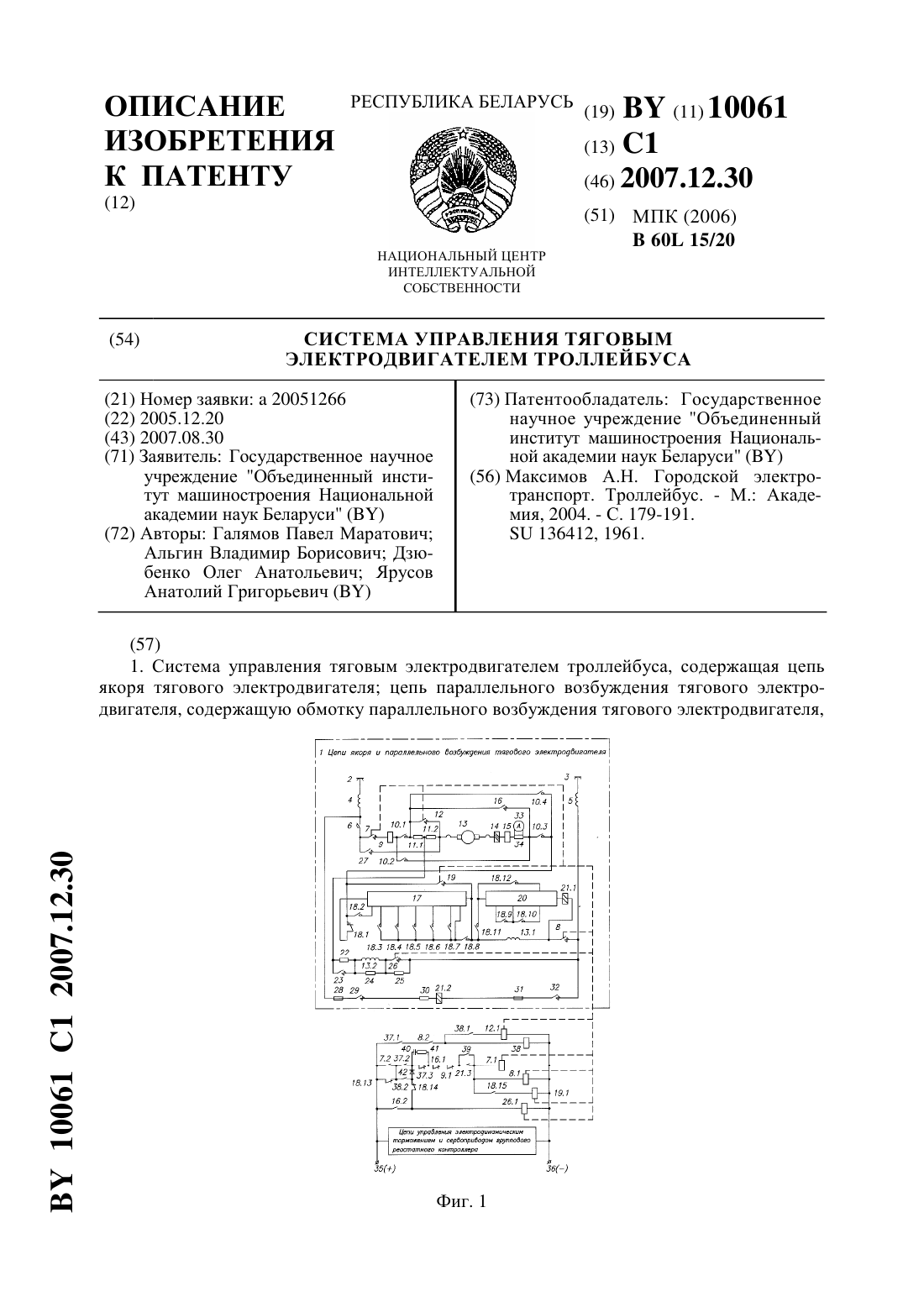
...коллектор транзистора соединен со вторым выводом второго кулачкового элемента группового реостатного контроллера, а эмиттер транзистора - с первым выводом катушки контактора управления параллельным возбуждением тягового электродвигателя, первый вывод первого резистора соединен с эмиттером транзистора и с первым выводом катушки контактора управления параллельным возбуждением тягового электродвигателя, второй вывод первого резистора...
Устройство для подъема дефектоскопной тележки вагонов-дефектоскопов
Номер патента: U 4559
Опубликовано: 30.08.2008
Авторы: Николайчук Валерий Александрович, Сильченко Олег Леонидович, Булавин Олег Евгеньевич
МПК: B61D 15/00
Метки: подъема, вагонов-дефектоскопов, тележки, устройство, дефектоскопной
Текст:
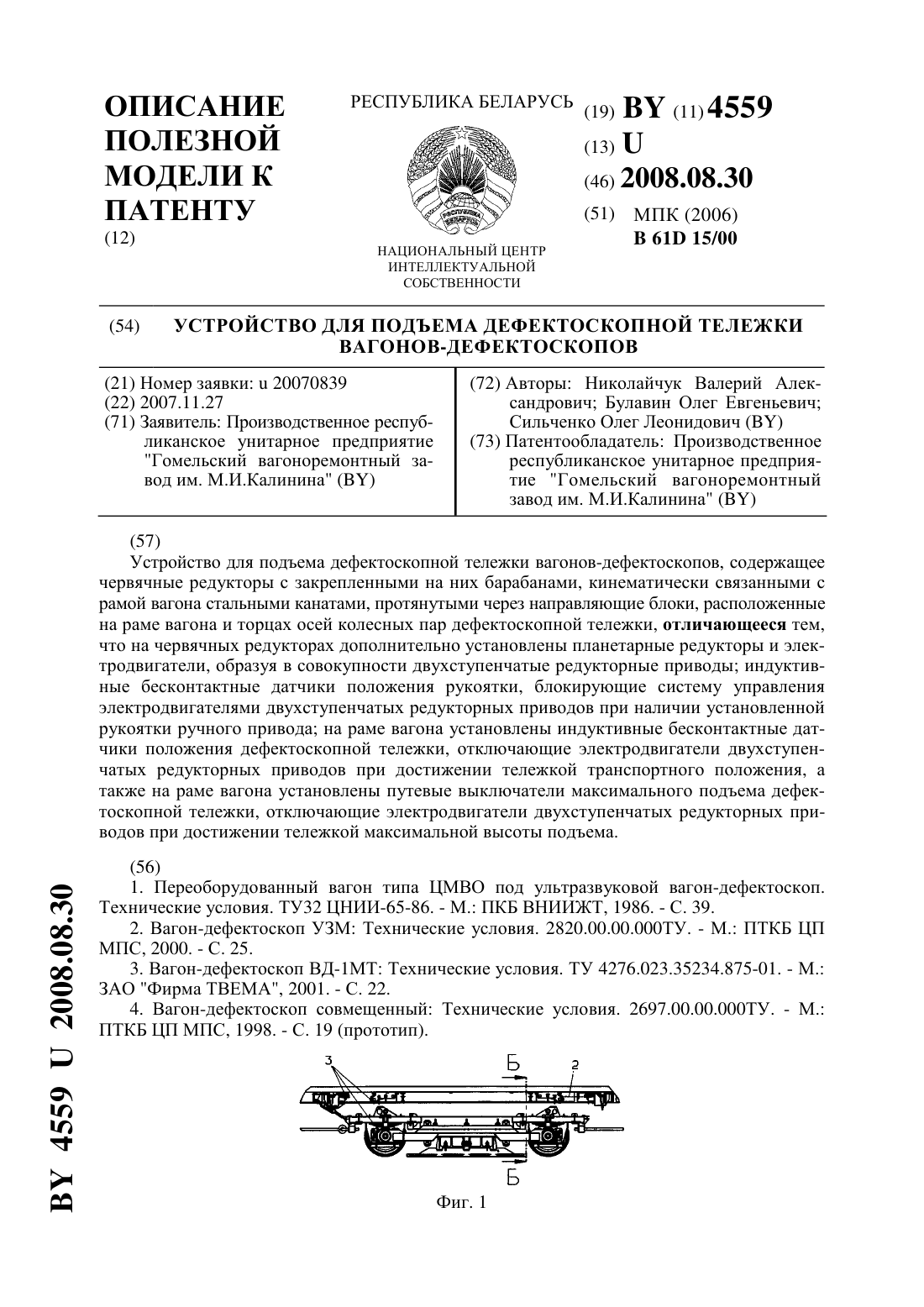
...подъему (или опусканию) тележки участвует один человек вместо четырех. Кроме того, предлагаемое устройство снабжено 1) индуктивными бесконтактными датчиками положения дефектоскопной тележки,расположенными на раме вагона и обеспечивающими отключение электродвигателей двухступенчатых редукторных приводов при достижении тележкой высоты транспортного положения 2 45592008.08.30 2) индуктивными бесконтактными датчиками положения рукояток ручного...
Устройство управления электроприводами экскаватора
Номер патента: U 7378
Опубликовано: 30.06.2011
Авторы: Климко Иван Юрьевич, Амелько Игорь Александрович
МПК: E02F 9/20
Метки: управления, экскаватора, устройство, электроприводами
Текст:
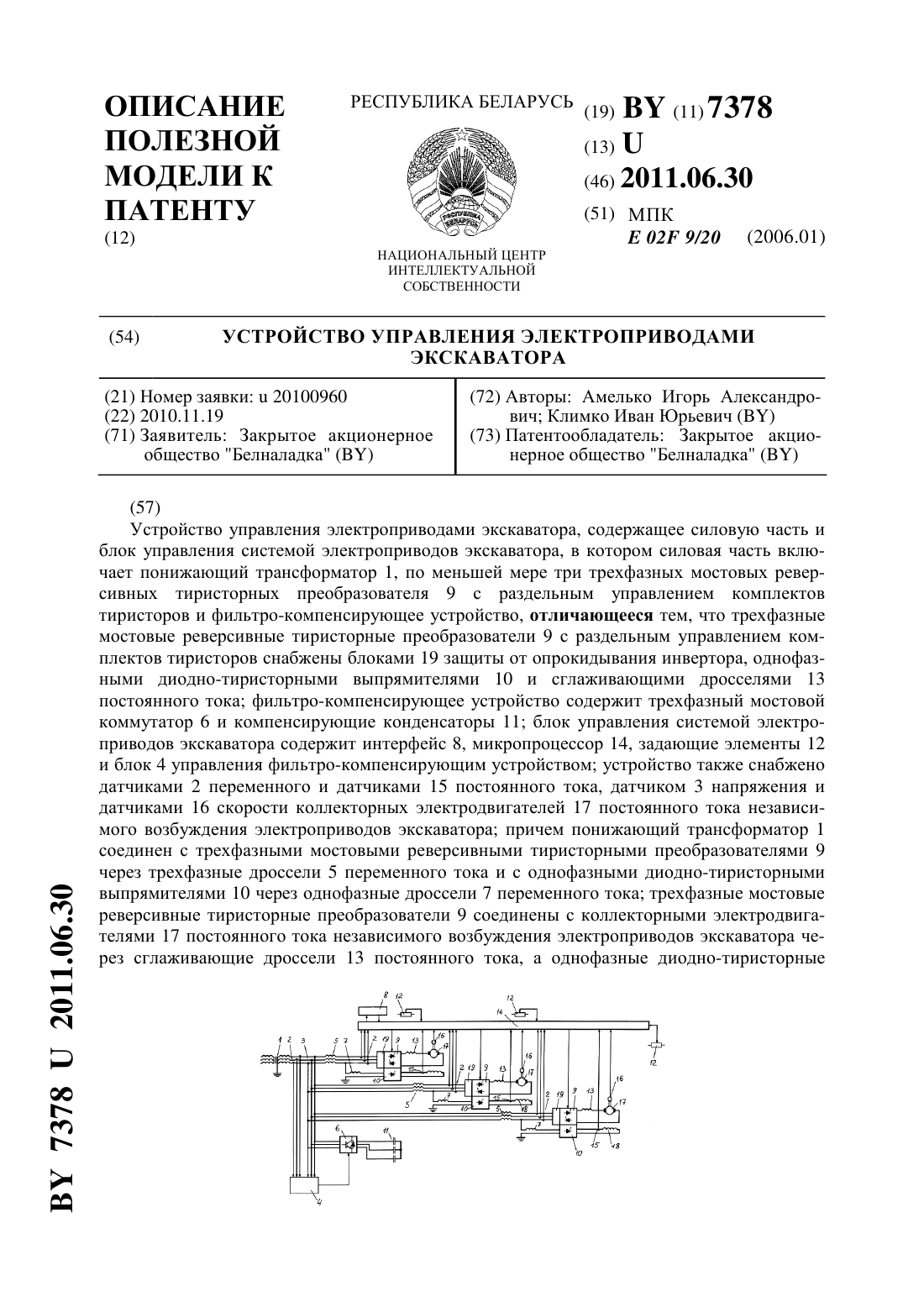
...трансформатору 1 параллельно с однофазными диоднотиристорными выпрямителями 10 и параллельно с трехфазными мостовыми реверсивными преобразователями 9 и к блоку 4 управления фильтро-компенсирующим устройством,который в свою очередь связан с датчиками 2 переменного тока и датчиком 3 переменного напряжения. Задающие элементы 12 подключены к микропроцессорному блоку 14, который связан с интерфейсным блоком 8, трехфазными мостовыми...
Система управления тяговым электродвигателем троллейбуса
Номер патента: U 4071
Опубликовано: 30.12.2007
Авторы: Минюкович Сергей Михайлович, Заиченко Сергей Иванович, Сидоров Владимир Германович, Владыцкий Василий Михайлович, Ярусов Анатолий Григорьевич, Автушко Сергей Валентинович, Галямов Павел Маратович, Высоцкий Михаил Степанович
МПК: B60L 15/20, B60L 9/00
Метки: троллейбуса, управления, тяговым, электродвигателем, система
Текст:
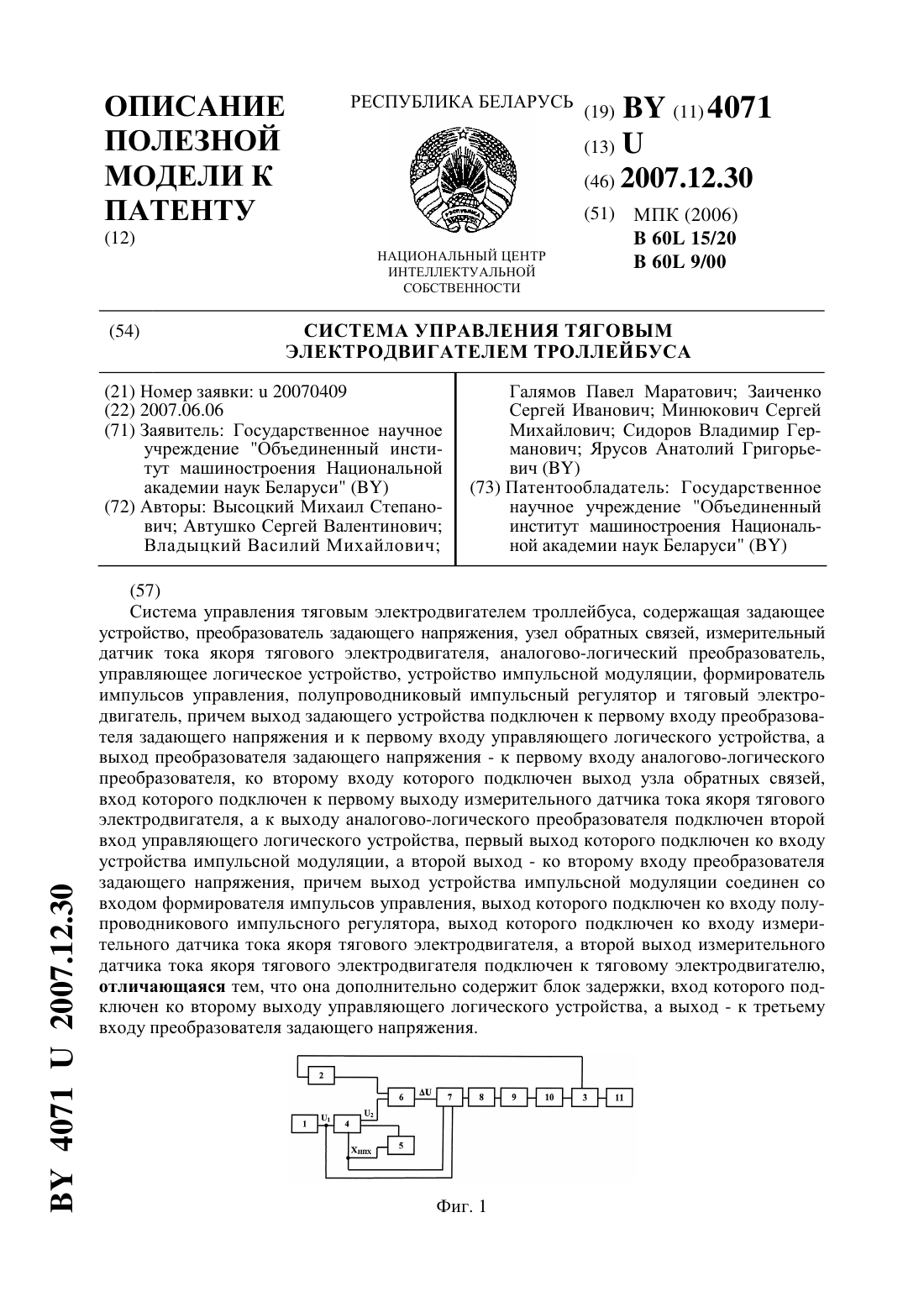
...3, а второй выход измерительного датчика тока якоря тягового электродвигателя подключен к тяговому электродвигателю 11. Вход блока задержки 5 подключен ко второму выходу управляющего логического устройства 7, а выход - к третьему входу преобразователя задающего напряжения 4. Система (фиг. 1) работает следующим образом. Водитель с помощью ходовой педали, входящей в состав задающего устройства 1, определяет величину задающего напряжения 1,...
Система управления центральной тягой механизма навески трактора
Номер патента: U 2712
Опубликовано: 30.04.2006
Авторы: Голод Сергей Владимирович, Лопух Дмитрий Геннадьевич, Солонский Михаил Александрович
МПК: A01B 59/04
Метки: навески, трактора, управления, система, центральной, тягой, механизма
Текст:
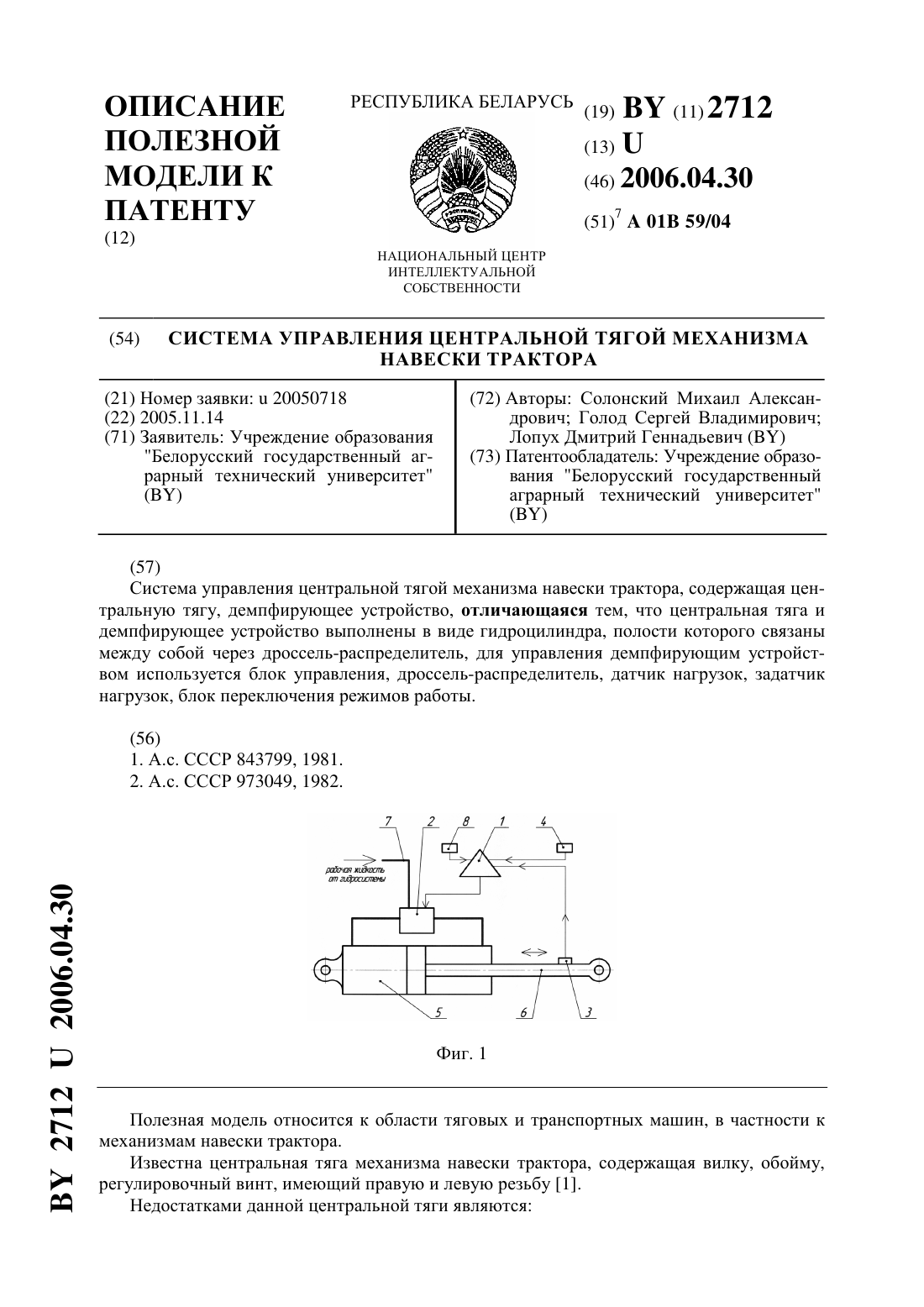
...навески трактора, содержащая центральную тягу, демпфирующее устройство, где центральная тяга и демпфирующее устройство выполнены в виде гидроцилиндра, полости которого связаны между собой через дроссель-распределитель, для управления демпфирующим устройством используется блок управления, дроссель-распределитель, датчик нагрузок, задатчик нагрузок, блок переключения режимов работы. На фиг. 1 изображена принципиальная схема системы...
Предыдущий патент: Установка для очистки воды методом тупиковой микро- или ультрафильтрации
Следующий патент: Преобразователь переменного тока в постоянный с системой управления выходными параметрами
Случайный патент: Способ получения картофельного концентрата