Устройство для подъема дефектоскопной тележки вагонов-дефектоскопов
Номер патента: U 4559
Опубликовано: 30.08.2008
Авторы: Николайчук Валерий Александрович, Сильченко Олег Леонидович, Булавин Олег Евгеньевич
Текст
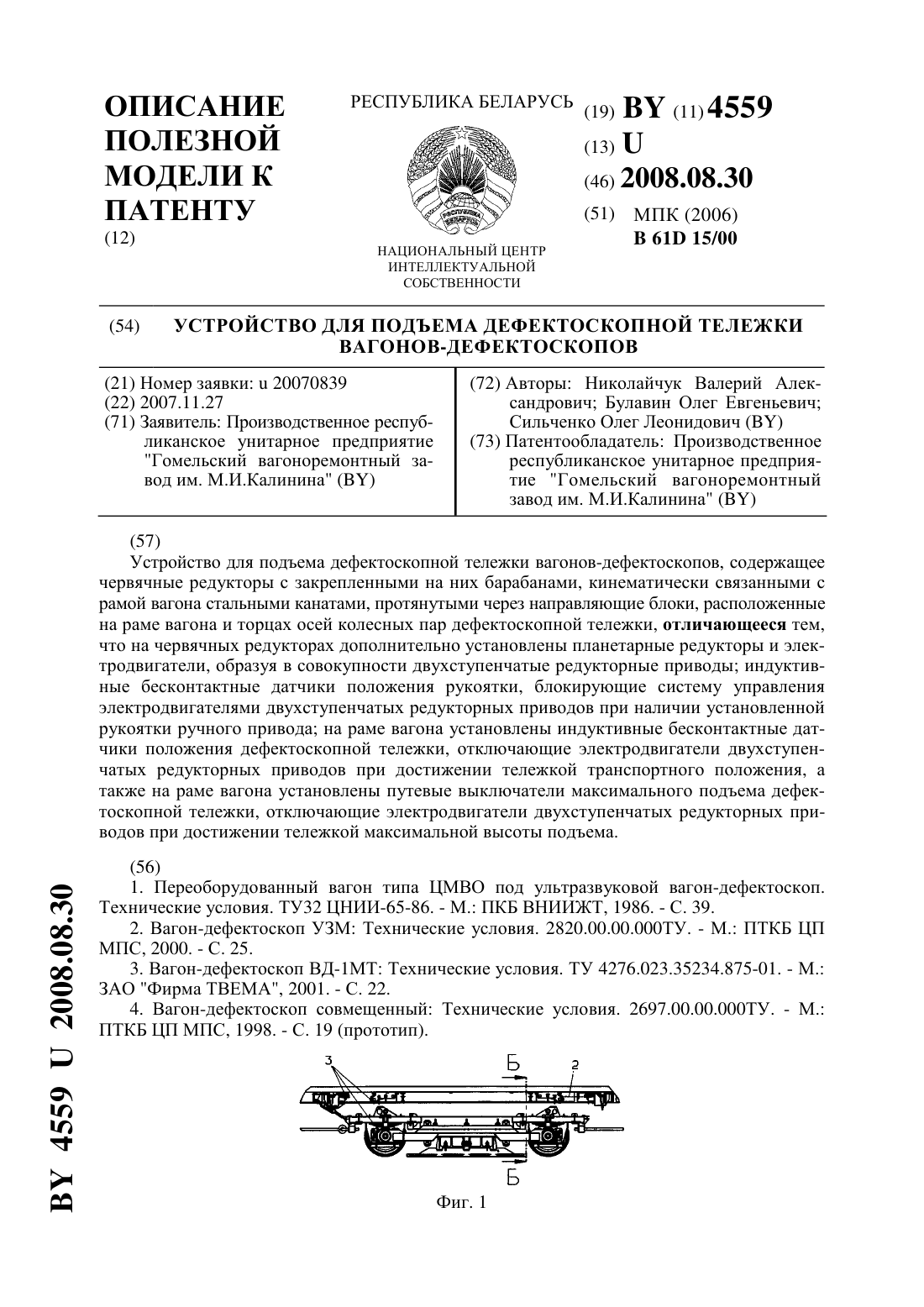
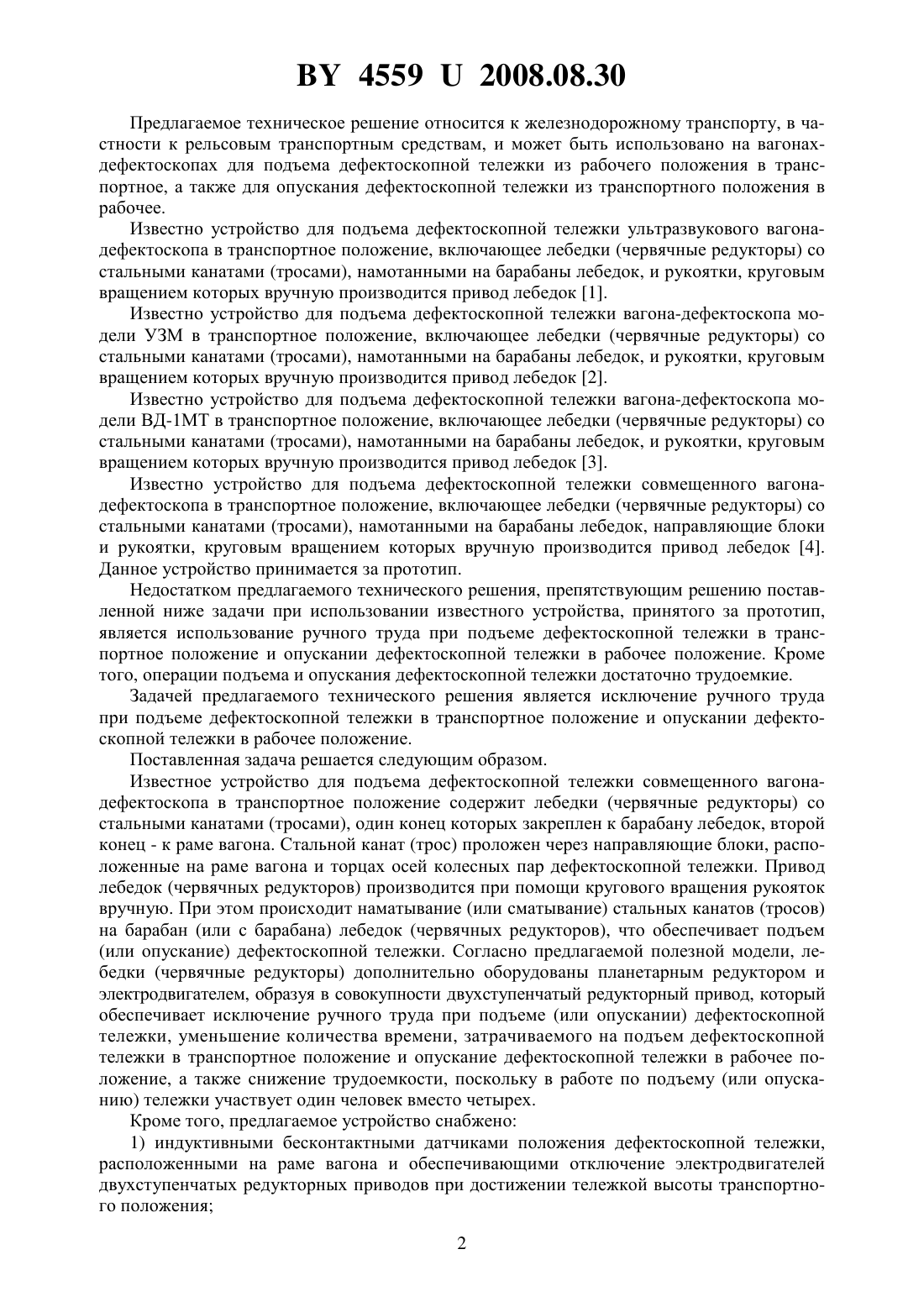
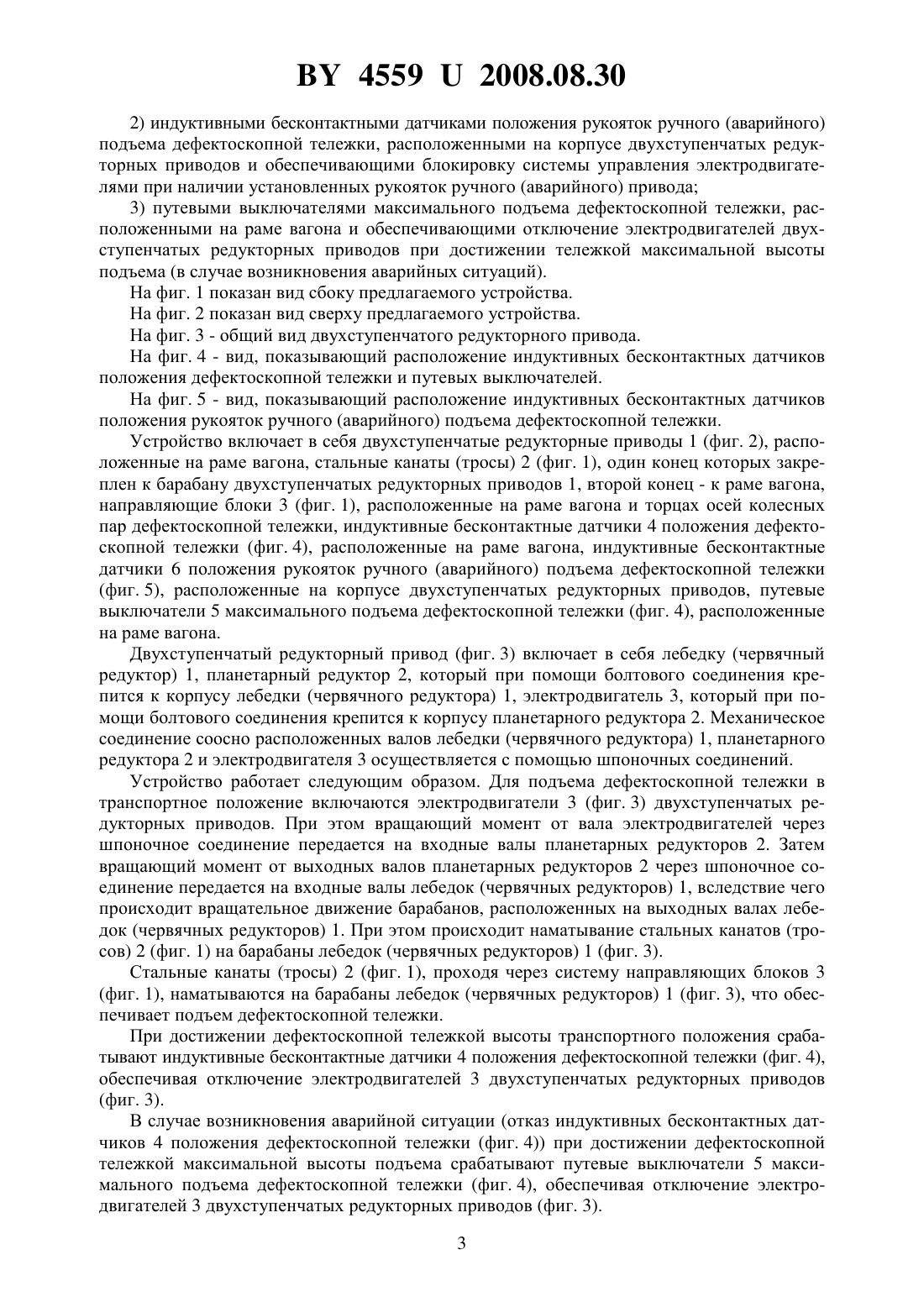
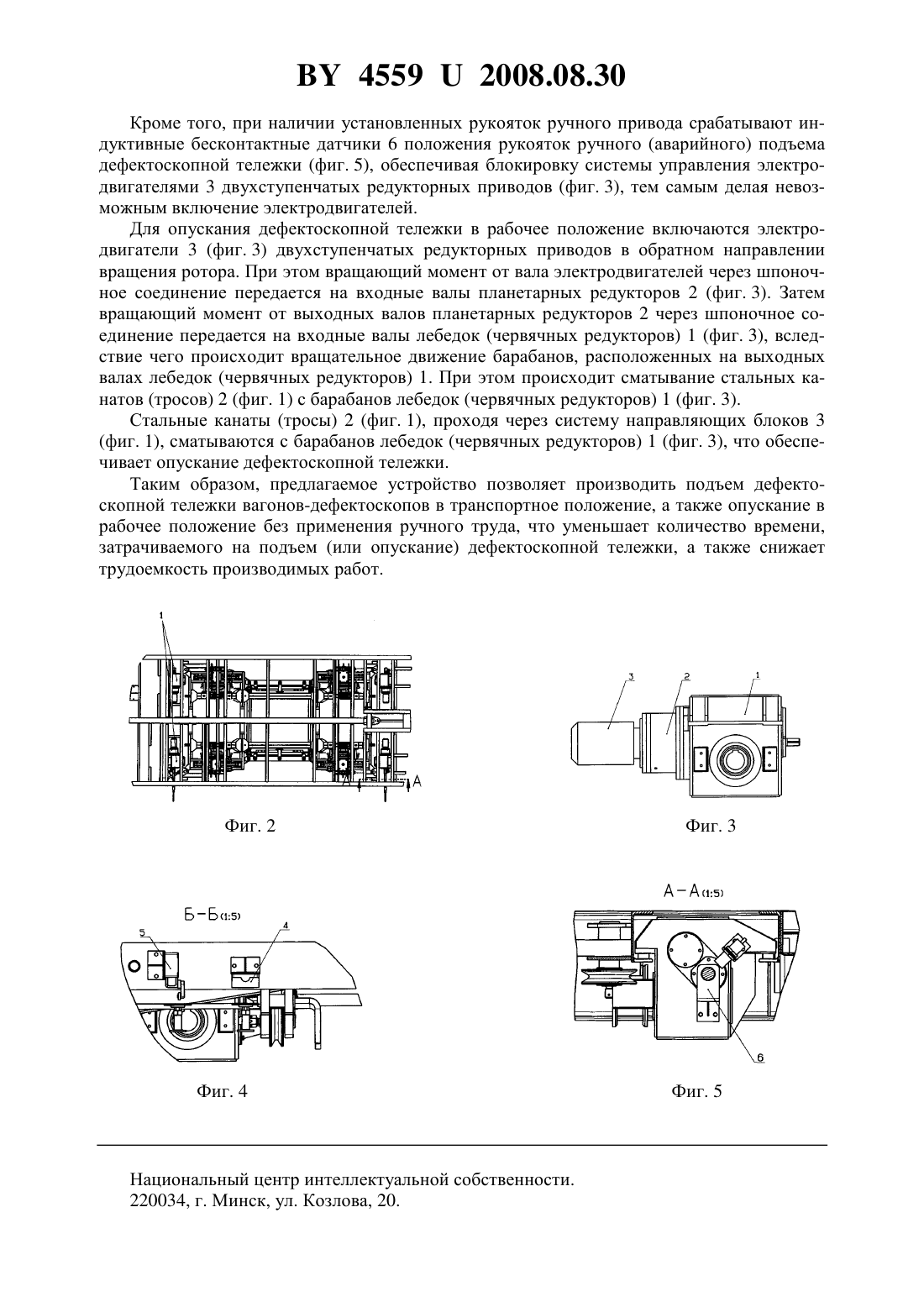
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ДЕФЕКТОСКОПНОЙ ТЕЛЕЖКИ ВАГОНОВ-ДЕФЕКТОСКОПОВ(71) Заявитель Производственное республиканское унитарное предприятие Гомельский вагоноремонтный завод им. М.И.Калинина(72) Авторы Николайчук Валерий Александрович Булавин Олег Евгеньевич Сильченко Олег Леонидович(73) Патентообладатель Производственное республиканское унитарное предприятие Гомельский вагоноремонтный завод им. М.И.Калинина(57) Устройство для подъема дефектоскопной тележки вагонов-дефектоскопов, содержащее червячные редукторы с закрепленными на них барабанами, кинематически связанными с рамой вагона стальными канатами, протянутыми через направляющие блоки, расположенные на раме вагона и торцах осей колесных пар дефектоскопной тележки, отличающееся тем,что на червячных редукторах дополнительно установлены планетарные редукторы и электродвигатели, образуя в совокупности двухступенчатые редукторные приводы индуктивные бесконтактные датчики положения рукоятки, блокирующие систему управления электродвигателями двухступенчатых редукторных приводов при наличии установленной рукоятки ручного привода на раме вагона установлены индуктивные бесконтактные датчики положения дефектоскопной тележки, отключающие электродвигатели двухступенчатых редукторных приводов при достижении тележкой транспортного положения, а также на раме вагона установлены путевые выключатели максимального подъема дефектоскопной тележки, отключающие электродвигатели двухступенчатых редукторных приводов при достижении тележкой максимальной высоты подъема.(56) 1. Переоборудованный вагон типа ЦМВО под ультразвуковой вагон-дефектоскоп. Технические условия. ТУ 32 ЦНИИ-65-86. - М. ПКБ ВНИИЖТ, 1986. - С. 39. 2. Вагон-дефектоскоп УЗМ Технические условия. 2820.00.00.000 ТУ. - М. ПТКБ ЦП МПС, 2000. - С. 25. 3. Вагон-дефектоскоп ВД-1 МТ Технические условия. ТУ 4276.023.35234.875-01. - М. ЗАО Фирма ТВЕМА, 2001. - С. 22. 4. Вагон-дефектоскоп совмещенный Технические условия. 2697.00.00.000 ТУ. - М. ПТКБ ЦП МПС, 1998. - С. 19 (прототип). 45592008.08.30 Предлагаемое техническое решение относится к железнодорожному транспорту, в частности к рельсовым транспортным средствам, и может быть использовано на вагонахдефектоскопах для подъема дефектоскопной тележки из рабочего положения в транспортное, а также для опускания дефектоскопной тележки из транспортного положения в рабочее. Известно устройство для подъема дефектоскопной тележки ультразвукового вагонадефектоскопа в транспортное положение, включающее лебедки (червячные редукторы) со стальными канатами (тросами), намотанными на барабаны лебедок, и рукоятки, круговым вращением которых вручную производится привод лебедок 1. Известно устройство для подъема дефектоскопной тележки вагона-дефектоскопа модели УЗМ в транспортное положение, включающее лебедки (червячные редукторы) со стальными канатами (тросами), намотанными на барабаны лебедок, и рукоятки, круговым вращением которых вручную производится привод лебедок 2. Известно устройство для подъема дефектоскопной тележки вагона-дефектоскопа модели ВД-1 МТ в транспортное положение, включающее лебедки (червячные редукторы) со стальными канатами (тросами), намотанными на барабаны лебедок, и рукоятки, круговым вращением которых вручную производится привод лебедок 3. Известно устройство для подъема дефектоскопной тележки совмещенного вагонадефектоскопа в транспортное положение, включающее лебедки (червячные редукторы) со стальными канатами (тросами), намотанными на барабаны лебедок, направляющие блоки и рукоятки, круговым вращением которых вручную производится привод лебедок 4. Данное устройство принимается за прототип. Недостатком предлагаемого технического решения, препятствующим решению поставленной ниже задачи при использовании известного устройства, принятого за прототип,является использование ручного труда при подъеме дефектоскопной тележки в транспортное положение и опускании дефектоскопной тележки в рабочее положение. Кроме того, операции подъема и опускания дефектоскопной тележки достаточно трудоемкие. Задачей предлагаемого технического решения является исключение ручного труда при подъеме дефектоскопной тележки в транспортное положение и опускании дефектоскопной тележки в рабочее положение. Поставленная задача решается следующим образом. Известное устройство для подъема дефектоскопной тележки совмещенного вагонадефектоскопа в транспортное положение содержит лебедки (червячные редукторы) со стальными канатами (тросами), один конец которых закреплен к барабану лебедок, второй конец - к раме вагона. Стальной канат (трос) проложен через направляющие блоки, расположенные на раме вагона и торцах осей колесных пар дефектоскопной тележки. Привод лебедок (червячных редукторов) производится при помощи кругового вращения рукояток вручную. При этом происходит наматывание (или сматывание) стальных канатов (тросов) на барабан (или с барабана) лебедок (червячных редукторов), что обеспечивает подъем(или опускание) дефектоскопной тележки. Согласно предлагаемой полезной модели, лебедки (червячные редукторы) дополнительно оборудованы планетарным редуктором и электродвигателем, образуя в совокупности двухступенчатый редукторный привод, который обеспечивает исключение ручного труда при подъеме (или опускании) дефектоскопной тележки, уменьшение количества времени, затрачиваемого на подъем дефектоскопной тележки в транспортное положение и опускание дефектоскопной тележки в рабочее положение, а также снижение трудоемкости, поскольку в работе по подъему (или опусканию) тележки участвует один человек вместо четырех. Кроме того, предлагаемое устройство снабжено 1) индуктивными бесконтактными датчиками положения дефектоскопной тележки,расположенными на раме вагона и обеспечивающими отключение электродвигателей двухступенчатых редукторных приводов при достижении тележкой высоты транспортного положения 2 45592008.08.30 2) индуктивными бесконтактными датчиками положения рукояток ручного (аварийного) подъема дефектоскопной тележки, расположенными на корпусе двухступенчатых редукторных приводов и обеспечивающими блокировку системы управления электродвигателями при наличии установленных рукояток ручного (аварийного) привода 3) путевыми выключателями максимального подъема дефектоскопной тележки, расположенными на раме вагона и обеспечивающими отключение электродвигателей двухступенчатых редукторных приводов при достижении тележкой максимальной высоты подъема (в случае возникновения аварийных ситуаций). На фиг. 1 показан вид сбоку предлагаемого устройства. На фиг. 2 показан вид сверху предлагаемого устройства. На фиг. 3 - общий вид двухступенчатого редукторного привода. На фиг. 4 - вид, показывающий расположение индуктивных бесконтактных датчиков положения дефектоскопной тележки и путевых выключателей. На фиг. 5 - вид, показывающий расположение индуктивных бесконтактных датчиков положения рукояток ручного (аварийного) подъема дефектоскопной тележки. Устройство включает в себя двухступенчатые редукторные приводы 1 (фиг. 2), расположенные на раме вагона, стальные канаты (тросы) 2 (фиг. 1), один конец которых закреплен к барабану двухступенчатых редукторных приводов 1, второй конец - к раме вагона,направляющие блоки 3 (фиг. 1), расположенные на раме вагона и торцах осей колесных пар дефектоскопной тележки, индуктивные бесконтактные датчики 4 положения дефектоскопной тележки (фиг. 4), расположенные на раме вагона, индуктивные бесконтактные датчики 6 положения рукояток ручного (аварийного) подъема дефектоскопной тележки(фиг. 5), расположенные на корпусе двухступенчатых редукторных приводов, путевые выключатели 5 максимального подъема дефектоскопной тележки (фиг. 4), расположенные на раме вагона. Двухступенчатый редукторный привод (фиг. 3) включает в себя лебедку (червячный редуктор) 1, планетарный редуктор 2, который при помощи болтового соединения крепится к корпусу лебедки (червячного редуктора) 1, электродвигатель 3, который при помощи болтового соединения крепится к корпусу планетарного редуктора 2. Механическое соединение соосно расположенных валов лебедки (червячного редуктора) 1, планетарного редуктора 2 и электродвигателя 3 осуществляется с помощью шпоночных соединений. Устройство работает следующим образом. Для подъема дефектоскопной тележки в транспортное положение включаются электродвигатели 3 (фиг. 3) двухступенчатых редукторных приводов. При этом вращающий момент от вала электродвигателей через шпоночное соединение передается на входные валы планетарных редукторов 2. Затем вращающий момент от выходных валов планетарных редукторов 2 через шпоночное соединение передается на входные валы лебедок (червячных редукторов) 1, вследствие чего происходит вращательное движение барабанов, расположенных на выходных валах лебедок (червячных редукторов) 1. При этом происходит наматывание стальных канатов (тросов) 2 (фиг. 1) на барабаны лебедок (червячных редукторов) 1 (фиг. 3). Стальные канаты (тросы) 2 (фиг. 1), проходя через систему направляющих блоков 3(фиг. 1), наматываются на барабаны лебедок (червячных редукторов) 1 (фиг. 3), что обеспечивает подъем дефектоскопной тележки. При достижении дефектоскопной тележкой высоты транспортного положения срабатывают индуктивные бесконтактные датчики 4 положения дефектоскопной тележки (фиг. 4),обеспечивая отключение электродвигателей 3 двухступенчатых редукторных приводов(фиг. 3). В случае возникновения аварийной ситуации (отказ индуктивных бесконтактных датчиков 4 положения дефектоскопной тележки (фиг. 4 при достижении дефектоскопной тележкой максимальной высоты подъема срабатывают путевые выключатели 5 максимального подъема дефектоскопной тележки (фиг. 4), обеспечивая отключение электродвигателей 3 двухступенчатых редукторных приводов (фиг. 3). 3 45592008.08.30 Кроме того, при наличии установленных рукояток ручного привода срабатывают индуктивные бесконтактные датчики 6 положения рукояток ручного (аварийного) подъема дефектоскопной тележки (фиг. 5), обеспечивая блокировку системы управления электродвигателями 3 двухступенчатых редукторных приводов (фиг. 3), тем самым делая невозможным включение электродвигателей. Для опускания дефектоскопной тележки в рабочее положение включаются электродвигатели 3 (фиг. 3) двухступенчатых редукторных приводов в обратном направлении вращения ротора. При этом вращающий момент от вала электродвигателей через шпоночное соединение передается на входные валы планетарных редукторов 2 (фиг. 3). Затем вращающий момент от выходных валов планетарных редукторов 2 через шпоночное соединение передается на входные валы лебедок (червячных редукторов) 1 (фиг. 3), вследствие чего происходит вращательное движение барабанов, расположенных на выходных валах лебедок (червячных редукторов) 1. При этом происходит сматывание стальных канатов (тросов) 2 (фиг. 1) с барабанов лебедок (червячных редукторов) 1 (фиг. 3). Стальные канаты (тросы) 2 (фиг. 1), проходя через систему направляющих блоков 3(фиг. 1), сматываются с барабанов лебедок (червячных редукторов) 1 (фиг. 3), что обеспечивает опускание дефектоскопной тележки. Таким образом, предлагаемое устройство позволяет производить подъем дефектоскопной тележки вагонов-дефектоскопов в транспортное положение, а также опускание в рабочее положение без применения ручного труда, что уменьшает количество времени,затрачиваемого на подъем (или опускание) дефектоскопной тележки, а также снижает трудоемкость производимых работ. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B61D 15/00
Метки: устройство, дефектоскопной, вагонов-дефектоскопов, тележки, подъема
Код ссылки
<a href="https://by.patents.su/4-u4559-ustrojjstvo-dlya-podema-defektoskopnojj-telezhki-vagonov-defektoskopov.html" rel="bookmark" title="База патентов Беларуси">Устройство для подъема дефектоскопной тележки вагонов-дефектоскопов</a>
Устройство для ремонта рам железнодорожных вагонов
Номер патента: U 1857
Опубликовано: 30.03.2005
Авторы: Вашук Владимир Егорович, Голенов Александр Николаевич, Кириенко Владимир Петрович
МПК: B60S 13/00
Метки: железнодорожных, вагонов, рам, устройство, ремонта
Текст:
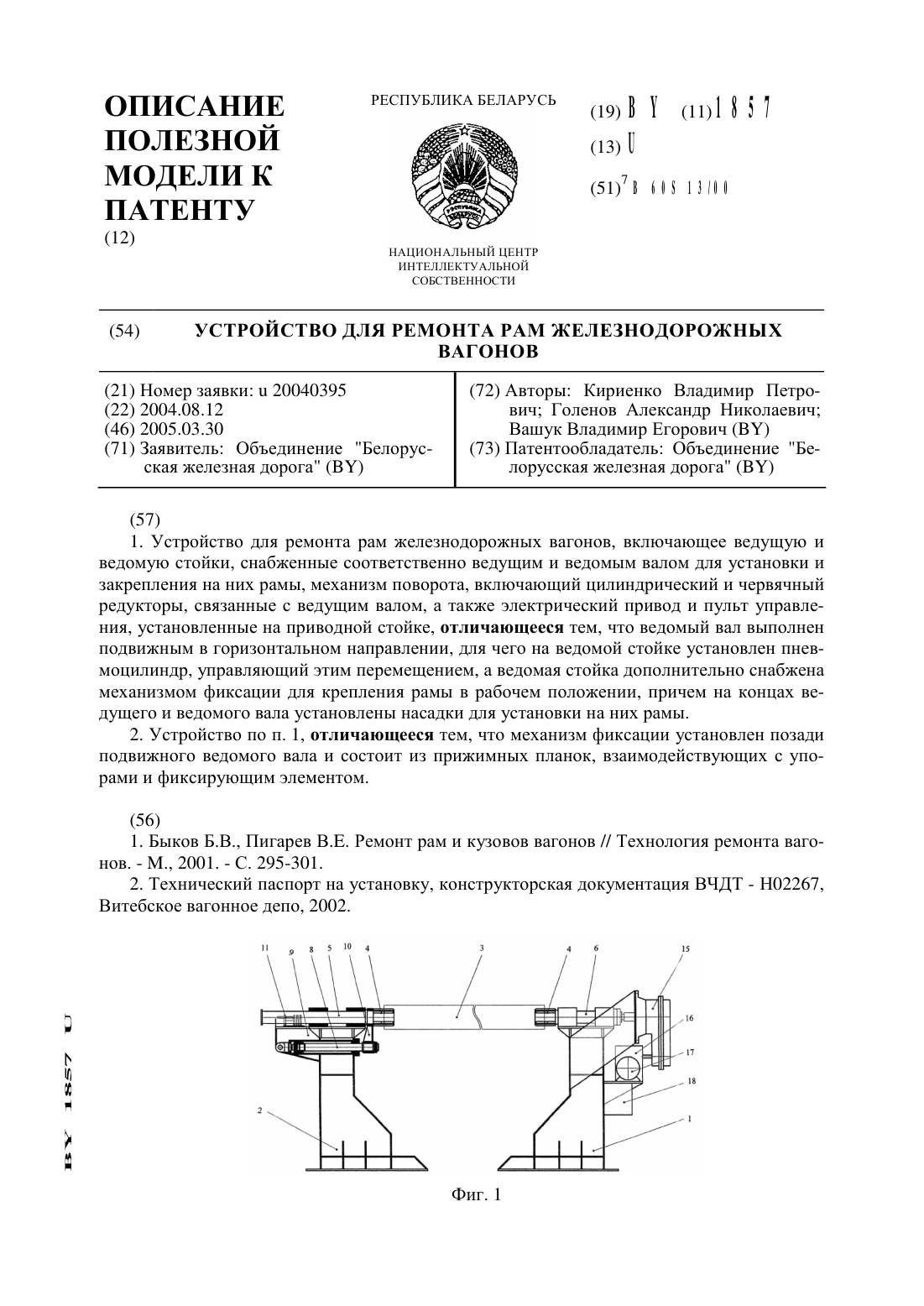
...следующим образом. Известное устройство включает ведущую (приводную) и ведомую стойки, снабженные соответственно поворотными ведущим и ведомым валами для установки и крепления на них рам, механизм поворота, включающий цилиндрический и червячный редуктор, связанные с ведущим валом и электродвигателем, а также пульт управления, установленный на приводной стойке. Согласно предлагаемому техническому решению,ведомый вал выполнен подвижным в...
Устройство для подъема, крепления и опускания запасного колеса транспортного средства
Номер патента: U 889
Опубликовано: 30.06.2003
Авторы: Стефанович Владимир Иванович, Алиевич Мустафа Иванович
МПК: B62D 43/00
Метки: средства, подъема, транспортного, устройство, крепления, опускания, колеса, запасного
Текст:
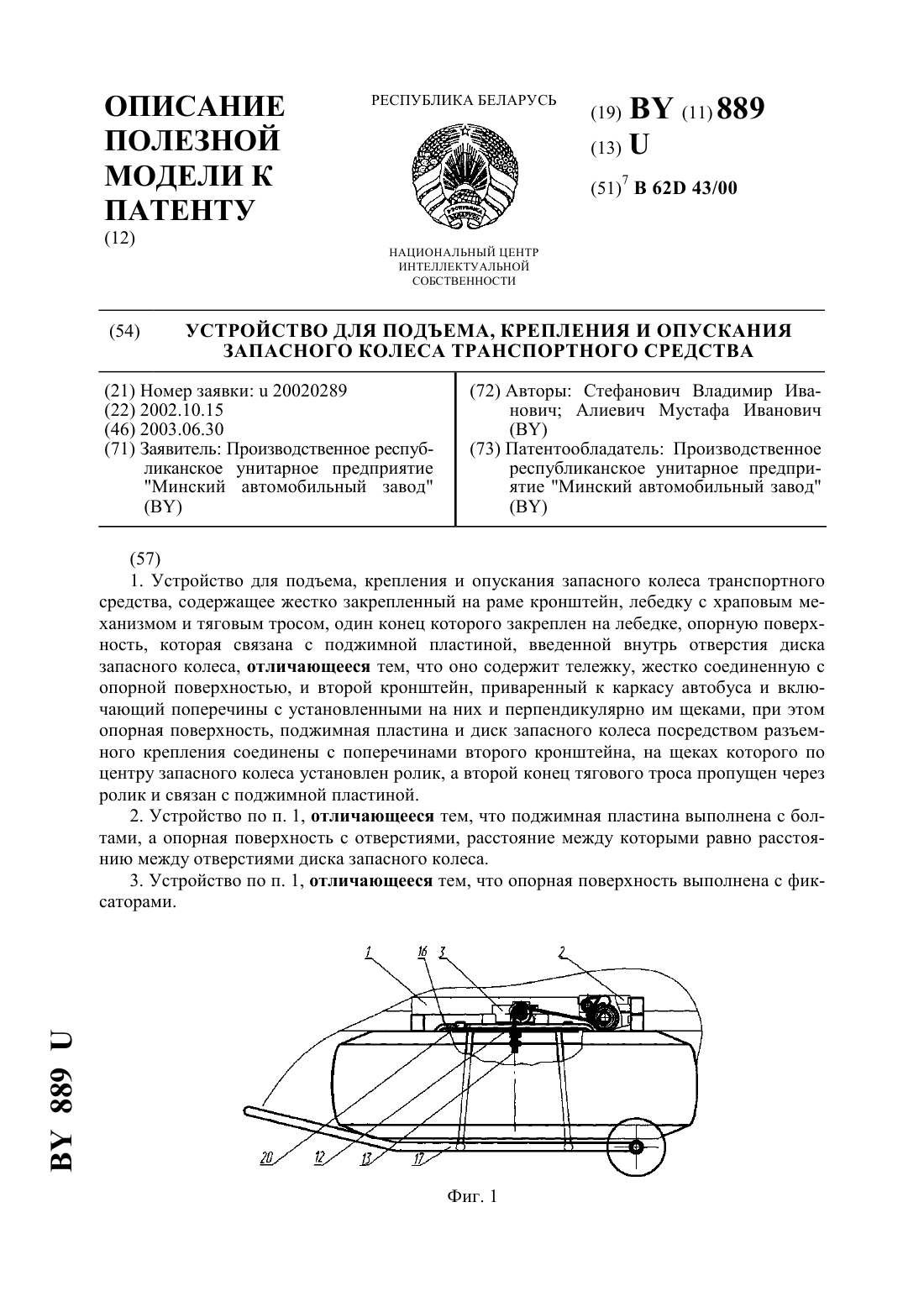
...с поджимной пластиной, введенной внутрь отверстия диска колеса, дополнительно содержит тележку, соединенную стойками с опорной поверхностью, и второй кронштейн, приваренный к каркасу автобуса и включающий поперечины с установленными на них и перпендикулярно им щеками. При этом опорная поверхность с диском запасного колеса и поджимной пластиной посредством разъемного крепления соединена с поперечинами второго кронштейна, а по центру запасного...
Тормозная рычажная передача тележки рельсового транспортного средства
Номер патента: 5562
Опубликовано: 30.09.2003
Авторы: Галай Эдуард Иванович, Рудов Павел Корнеевич
МПК: B61H 13/20
Метки: транспортного, рычажная, рельсового, передача, средства, тормозная, тележки
Текст:
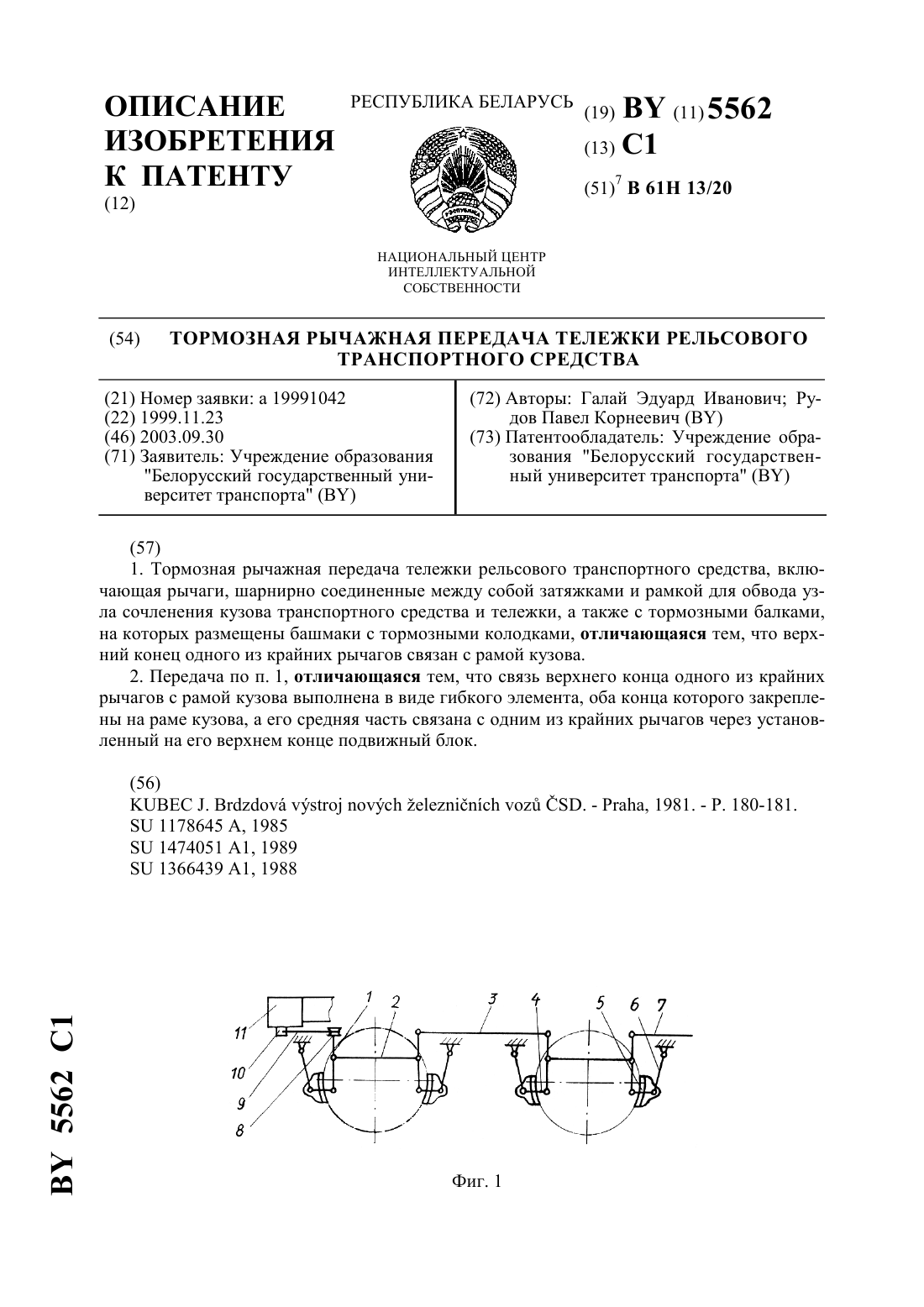
...рельсового транспортного средства, содержащей рычаги, шарнирно соединенные между собой затяжками и рамкой для обвода узла сочленения кузова транспортного средства и тележки, а также с тормозными балками, на которых размещены башмаки с тормозными колодками, верхний конец одного из крайних рычагов связан с рамой кузова. Связь верхнего конца одного из крайних рычагов с рамой кузова выполнена в виде гибкого элемента. Оба конца гибкого...
Устройство для подъема кабины транспортного средства
Номер патента: 1717
Опубликовано: 30.09.1997
Авторы: Мороз Александр Владимирович, Добринец Владимир Константинович
МПК: B62D 33/067
Метки: устройство, средства, транспортного, кабины, подъема
Текст:
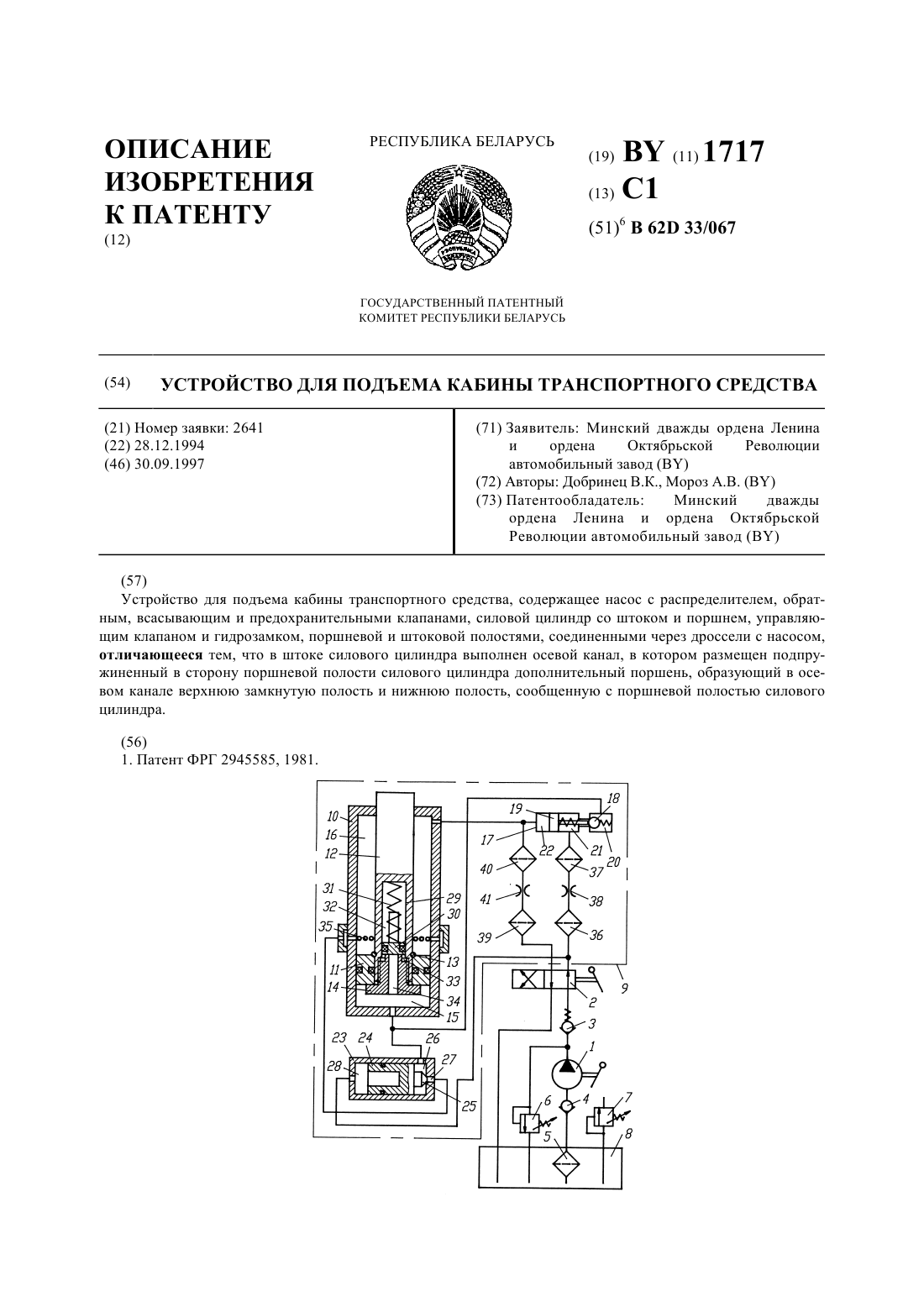
...шариковый клапан 18, поступает в напорную полость 20 гидрозамка 17 и далее в поршневую полость 15 силового цилиндра 9. Одновременно рабочая жидкость под давлением поступает в полость поджатия 28 управляющего клапана 23, поджимает конус 25 плунжера 24 к седлу, разобщая напорные полости 26 и 27, а также поршневую и штоковую полости 15 и 16 силового цилиндра 9. Так как поршневая полость 15 через отверстие 34 в упоре 14 сообщается с нижней...
Устройство для спуска и подъема скважинных приборов
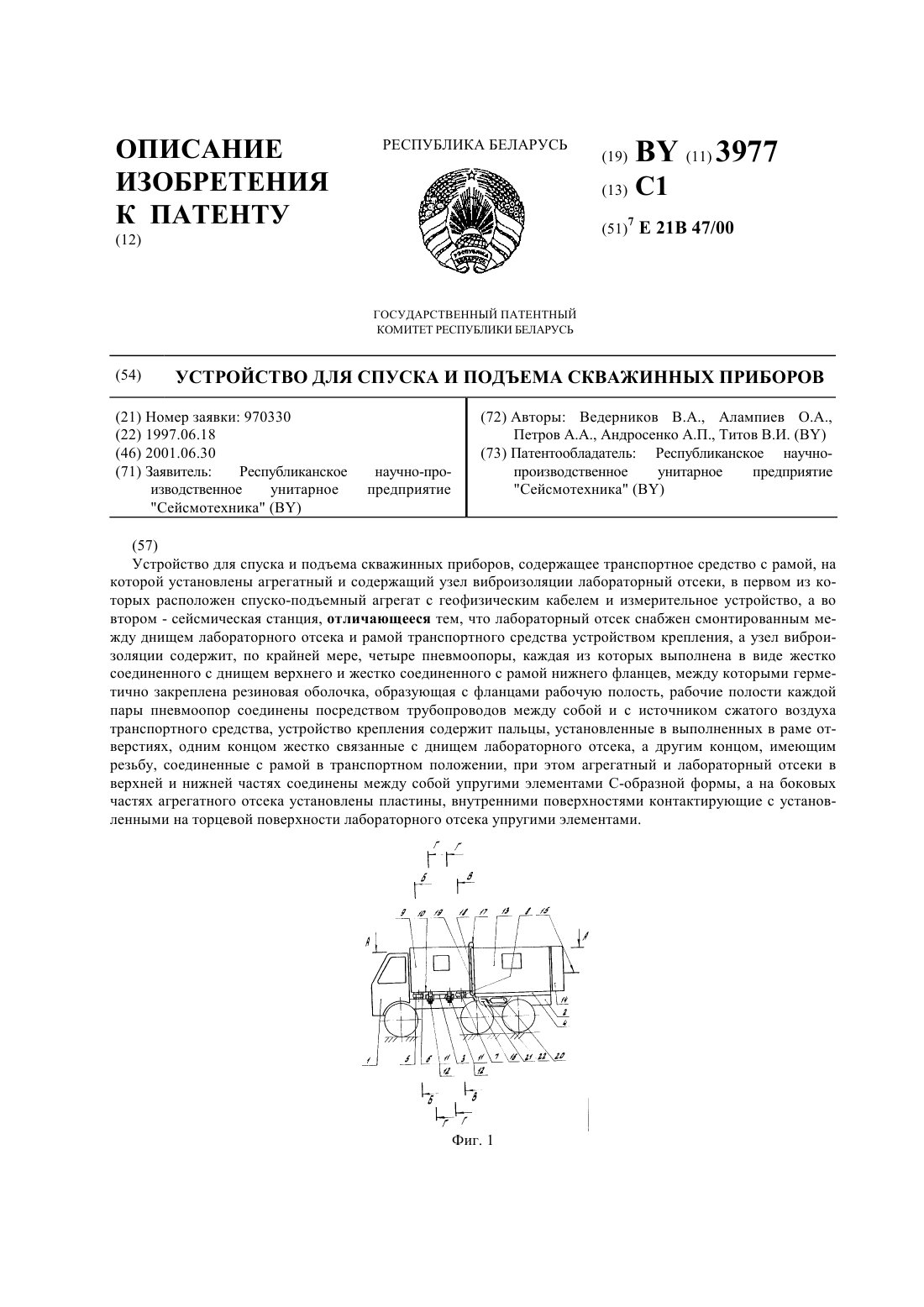
Номер патента: 3977
Опубликовано: 30.06.2001
Авторы: Петров Александр Александрович, Алампиев Олег Александрович, Ведерников Вячеслав Анатольевич, Титов Виктор Иванович, Андросенко Александр Павлович
МПК: E21B 47/00
Метки: скважинных, приборов, устройство, спуска, подъема
Текст:
...мере, четыре пневмоопоры, каждая из которых выполнена в виде жестко соединенного с днищем верхнего и жестко соединенного с рамой нижнего фланцев, между которыми герметично закреплена резиновая оболочка, образующая с фланцами рабочую полость, рабочие полости каждой пары пневмоопор соединены посредством трубопроводов между собой и с источником сжатого воздуха транспортного средства, устройство крепления содержит пальцы, установленные в...
Предыдущий патент: Устройство измерения девиации частоты излучения полупроводникового лазера
Следующий патент: Машина для уборки клубней топинамбура
Случайный патент: Облицовочная пластина пресс-форм