Система управления тяговым электродвигателем троллейбуса
Номер патента: U 4071
Опубликовано: 30.12.2007
Авторы: Минюкович Сергей Михайлович, Ярусов Анатолий Григорьевич, Сидоров Владимир Германович, Заиченко Сергей Иванович, Автушко Сергей Валентинович, Высоцкий Михаил Степанович, Галямов Павел Маратович, Владыцкий Василий Михайлович

Текст
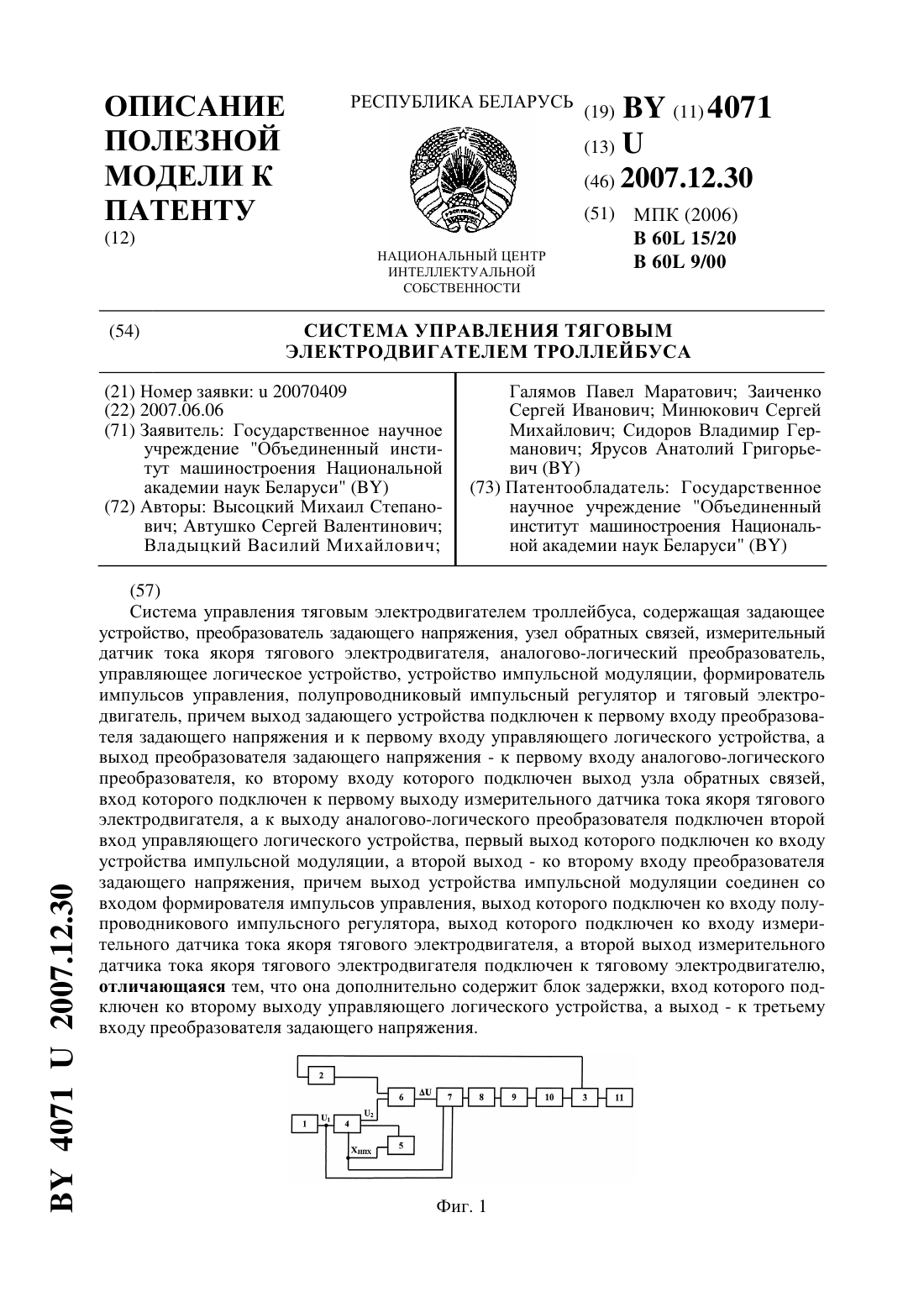
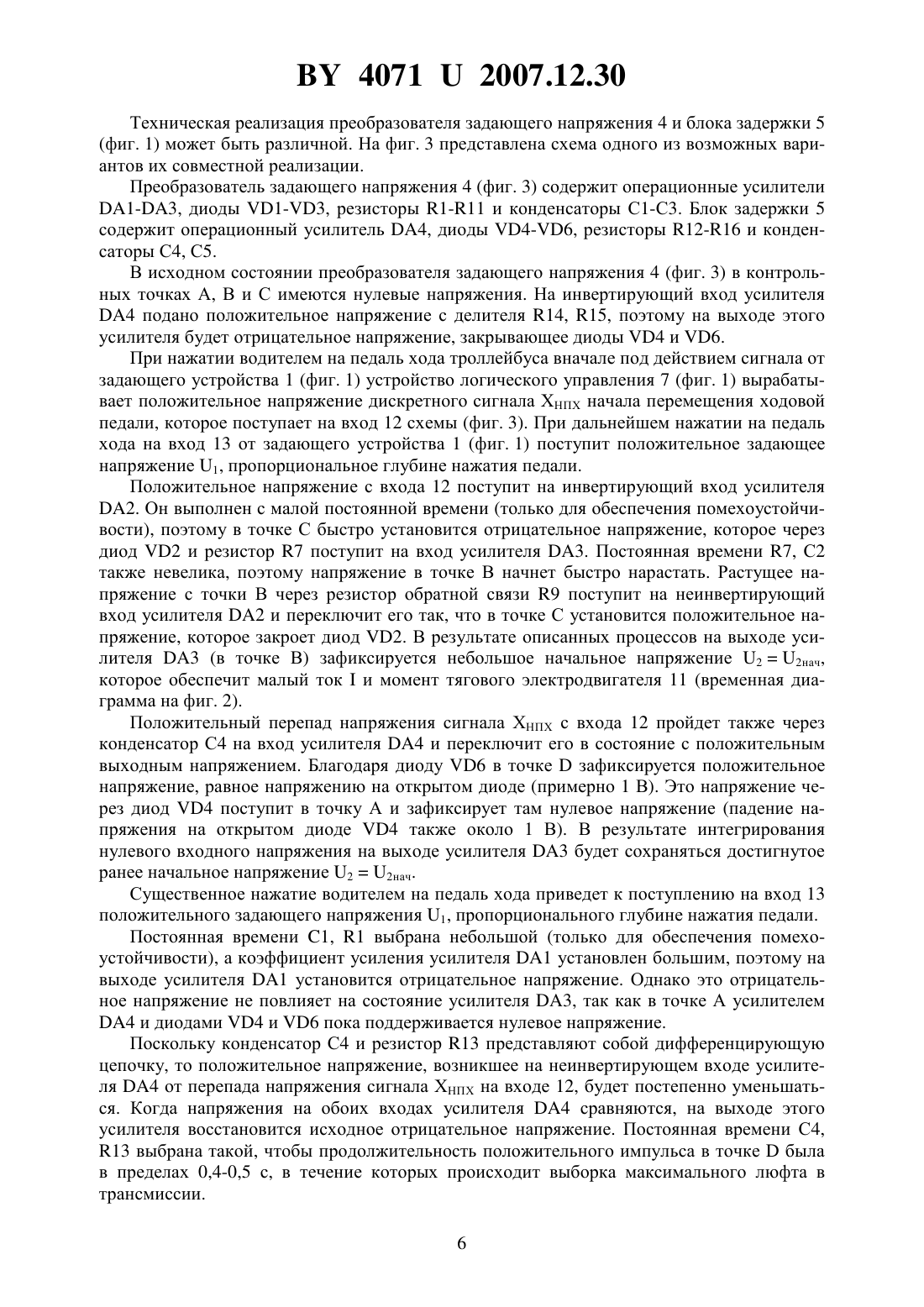
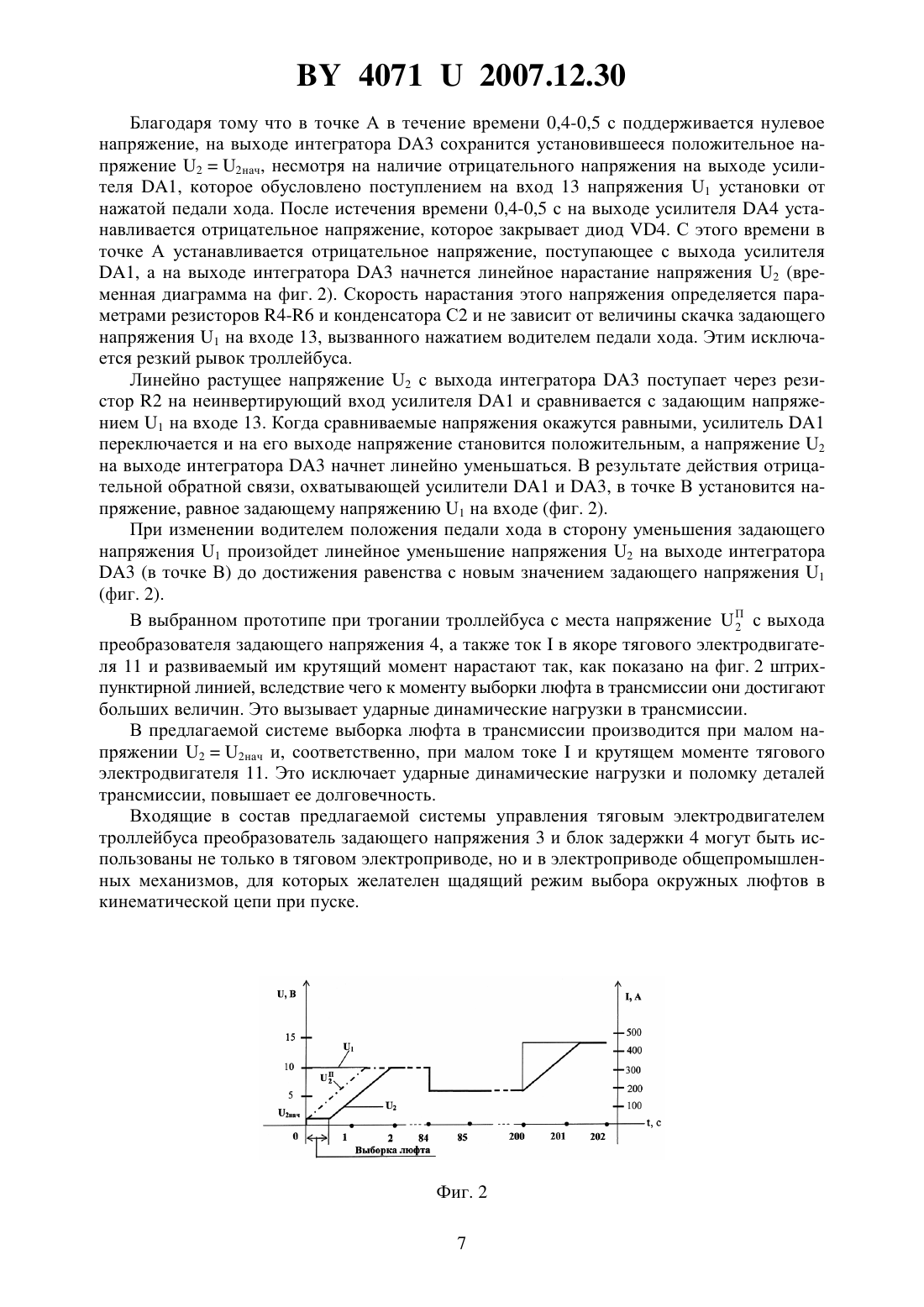
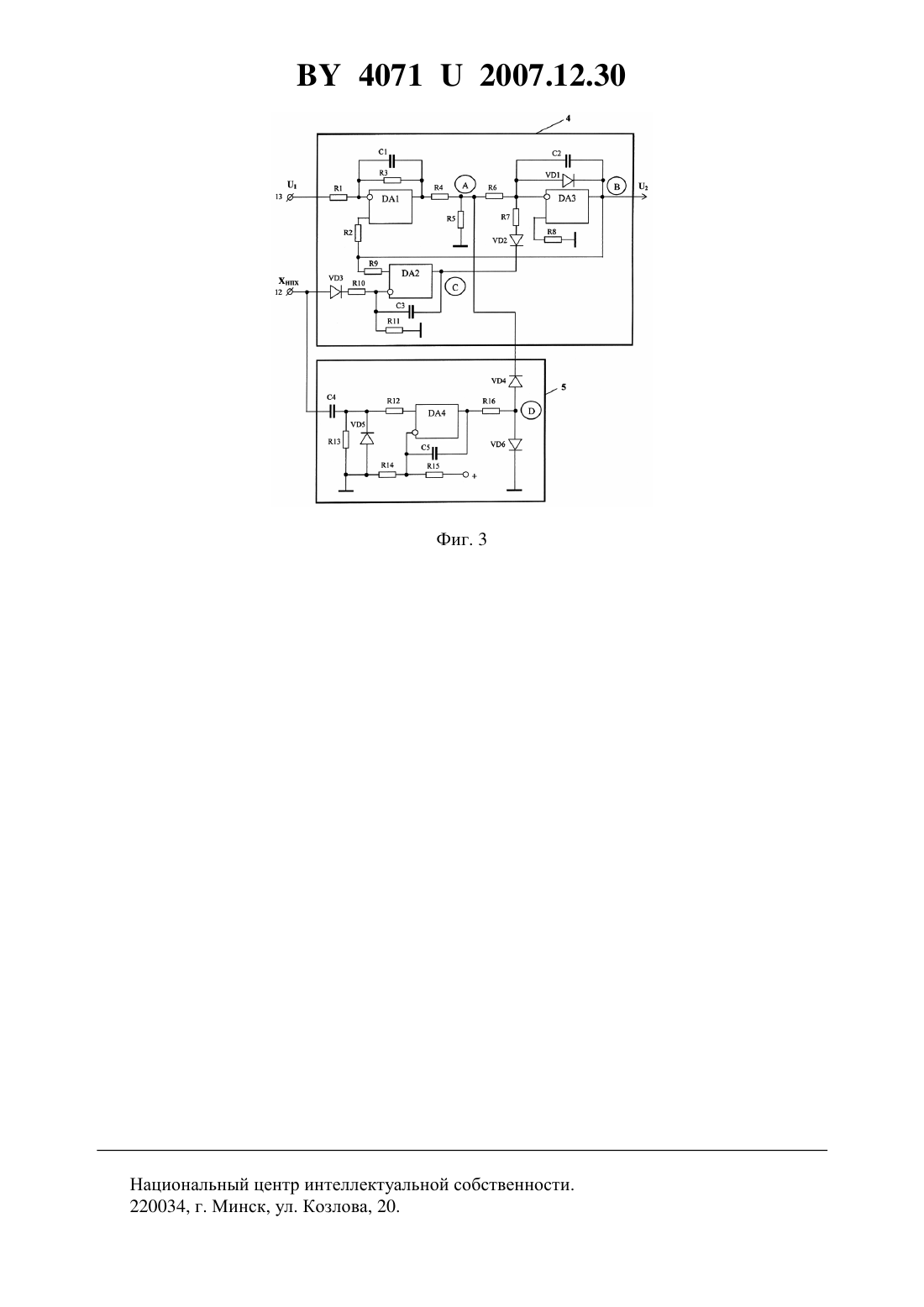
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ТРОЛЛЕЙБУСА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Высоцкий Михаил Степанович Автушко Сергей Валентинович Владыцкий Василий Михайлович Галямов Павел Маратович Заиченко Сергей Иванович Минюкович Сергей Михайлович Сидоров Владимир Германович Ярусов Анатолий Григорьевич(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Система управления тяговым электродвигателем троллейбуса, содержащая задающее устройство, преобразователь задающего напряжения, узел обратных связей, измерительный датчик тока якоря тягового электродвигателя, аналогово-логический преобразователь,управляющее логическое устройство, устройство импульсной модуляции, формирователь импульсов управления, полупроводниковый импульсный регулятор и тяговый электродвигатель, причем выход задающего устройства подключен к первому входу преобразователя задающего напряжения и к первому входу управляющего логического устройства, а выход преобразователя задающего напряжения - к первому входу аналогово-логического преобразователя, ко второму входу которого подключен выход узла обратных связей,вход которого подключен к первому выходу измерительного датчика тока якоря тягового электродвигателя, а к выходу аналогово-логического преобразователя подключен второй вход управляющего логического устройства, первый выход которого подключен ко входу устройства импульсной модуляции, а второй выход - ко второму входу преобразователя задающего напряжения, причем выход устройства импульсной модуляции соединен со входом формирователя импульсов управления, выход которого подключен ко входу полупроводникового импульсного регулятора, выход которого подключен ко входу измерительного датчика тока якоря тягового электродвигателя, а второй выход измерительного датчика тока якоря тягового электродвигателя подключен к тяговому электродвигателю,отличающаяся тем, что она дополнительно содержит блок задержки, вход которого подключен ко второму выходу управляющего логического устройства, а выход - к третьему входу преобразователя задающего напряжения.(56) 1. Богдан Н.В., Атаманов Ю.Е., Джагетян и др. Троллейбусы. Устройство и техническое обслуживание / Под ред. Н.В. Богдана. - Мн. НПО Трибофатика, 1997. - С. 169-182. 2. Ефремов И.С., Косарев Г.В. Теория и расчет троллейбусов (электрическое оборудование). Ч.2. - М. Высшая школа, 1981. - С. 238 - 244, рис. 21.5. 3. Ефремов И.С., Косарев Г.В. Теория и расчет троллейбусов (электрическое оборудование). Ч.2. - М. Высшая школа, 1981. - С. 244. 4. Троллейбус пассажирский 201. Техническое описание электропривода троллейбуса АКСМ 201-000000.000 ТО 1. - Мн. Производственное объединение промышленных предприятий Белкоммунмаш, 1997. - С. 33 - 35, рис. 6.10. Предлагаемая полезная модель относится к области электрооборудования транспортных средств с электротягой, а именно к системам управления тяговыми электродвигателями троллейбусов. Известна реостатно-контакторная система управления тяговым электродвигателем троллейбуса 1. Недостаток этой системы состоит в низком коэффициенте полезного действия, обусловленном потерями электрической энергии в пусковом реостате, а также в низкой плавности разгона троллейбуса, обусловленной ступенчатым выводом секций пускового реостата. Известна импульсная система управления тяговым электродвигателем троллейбуса,описанная в книге 2. Система содержит задающее устройство, узел обратных связей, измерительный датчик тока якоря тягового электродвигателя, аналогово-логический преобразователь, управляющее логическое устройство, устройство импульсной модуляции,формирователь импульсов управления, полупроводниковый импульсный регулятор и тяговый электродвигатель. В этой системе задающим устройством, преобразующим величину угла нажатия ходовой педали водителем, формируется напряжение задания тока якоря тягового электродвигателя (далее - задающее напряжение), пропорциональное степени нажатия ходовой педали водителем, а с помощью измерительного датчика тока якоря тягового электродвигателя узел обратных связей создает напряжение обратной связи по току якоря тягового электродвигателя. Эти напряжения сравниваются в аналогово-логическом преобразователе,где вырабатывается напряжение управления , названное в 3 сигналом рассогласования,которое, пройдя через управляющее логическое устройство, подается на вход устройства импульсной модуляции, в котором вырабатываются импульсные сигналы, модулированные по ширине. Эти импульсные сигналы обрабатываются в формирователе импульсов управления и посредством полупроводникового импульсного регулятора управляют током якоря тягового электродвигателя в функции напряжения управления , так что средний ток якоря становится пропорциональным задающему напряжению. Недостатком этой системы является возникновение рывков и толчков при разгоне и торможении троллейбуса. При резком изменении водителем положения ходовой педали (в задающем устройстве) задающее напряжение, поступающее на аналогово-логический преобразователь, изменится скачкообразно. Это приведет к образованию скачка напряжения управления , что вызовет соответствующий скачок величины тока, поступающего из полупроводникового импульсного регулятора в якорь тягового электродвигателя, и неприятный для пассажиров рывок троллейбуса. Ближайшим аналогом предлагаемой полезной модели является импульсная система управления тяговым электродвигателем троллейбуса, описанная в документе 4. В этой системе реализуется вышеописанный импульсный способ управления тяговым электродвигателем троллейбуса, но задающее напряжение предварительно (до сравнения с напряжением обратной связи) преобразуют с помощью преобразователя задающего напряжения в 2 40712007.12.30 кусочно-линейное напряжение, наклонные участки которого определяют ограниченные ускорения или замедления движения, соответствующие комфортному состоянию пассажиров. Это иллюстрируется рисунком 6.10 прототипа, где изображены временные диаграммы входного и выходного напряжений преобразователя задающего напряжения,названного задатчиком интенсивности. Недостаток этой системы состоит в том, что при разгоне троллейбуса с места преобразователь задающего напряжения (задатчик интенсивности) из скачкообразного задающего напряжения сразу вырабатывает линейно растущее напряжение, которое за время выборки неизбежных люфтов в механической трансмиссии уже достигает значительной величины. При этом по причине линейного характера нарастания тока якоря, под действием нарастающего электромагнитного крутящего момента, маховая масса якоря тягового электродвигателя за время выборки окружных люфтов успевает накопить существенный запас кинетической энергии, поглощение которой упругими элементами трансмиссии вызывает динамический удар, сопровождающий процесс замыкания кинематической цепи. Режим движения троллейбуса по городскому маршруту связан с многочисленными остановками и последующими разгонами (до 2000 раз в сутки), поэтому динамические удары,возникающие при каждом разгоне троллейбуса, приводят к снижению долговечности трансмиссии и поломкам деталей. Задачей настоящей полезной модели является разработка системы управления тяговым электродвигателем троллейбуса, которая исключала бы динамические удары при выборке люфтов в механической трансмиссии. Для решения поставленной задачи система управления тяговым электродвигателем троллейбуса, содержащая задающее устройство, преобразователь задающего напряжения,узел обратных связей, измерительный датчик тока якоря тягового электродвигателя, аналоговологический преобразователь, управляющее логическое устройство, устройство импульсной модуляции, формирователь импульсов управления, полупроводниковый импульсный регулятор и тяговый электродвигатель, причем выход задающего устройства подключен к первому входу преобразователя задающего напряжения и к первому входу управляющего логического устройства, а выход преобразователя задающего напряжения - к первому входу аналогово-логического преобразователя, ко второму входу которого подключен выход узла обратных связей, вход которого подключен к первому выходу измерительного датчика тока якоря тягового электродвигателя, а к выходу аналогово-логического преобразователя подключен второй вход управляющего логического устройства, первый выход которого подключен ко входу устройства импульсной модуляции, а второй выход - ко второму входу преобразователя задающего напряжения, причем выход устройства импульсной модуляции соединен со входом формирователя импульсов управления, выход которого подключен ко входу полупроводникового импульсного регулятора, выход которого подключен ко входу измерительного датчика тока якоря тягового электродвигателя, а второй выход измерительного датчика тока якоря тягового электродвигателя подключен к тяговому электродвигателю, согласно техническому решению, дополняется блоком задержки, вход которого подключен ко второму выходу управляющего логического устройства, а выход - к третьему входу преобразователя задающего напряжения. При разгоне троллейбуса с места блок задержки удерживает задающее напряжение в течение времени выборки механических люфтов в трансмиссии на постоянном низком уровне, соответствующем крутящему моменту тягового электродвигателя минимальной величины, необходимой для выборки окружных люфтов в трансмиссии. В результате этого люфты в механической трансмиссии выбираются при постоянном минимальном моменте тягового электродвигателя, исключаются динамические удары, увеличивается долговечность трансмиссии и предотвращается поломка ее деталей. На фиг. 1 изображена схема предлагаемой системы управления тяговым электродвигателем троллейбуса. На фиг. 2 - временные диаграммы преобразования задающего на 3 40712007.12.30 пряжения 1 в кусочно-линейное напряжение 2. Диаграмма 2 отражает также (в ином масштабе) изменение токав якоре тягового электродвигателя. На фиг. 3 - один из возможных вариантов принципиальной схемы преобразователя задающего напряжения и блока задержки. Система (фиг. 1) содержит задающее устройство 1, вырабатывающее задающее напряжение 1, задаваемое водителем с помощью ходовой педали (педаль не показана), узел обратных связей 2, вырабатывающий напряжение обратной связи по току якоря тягового электродвигателя на основе сигнала от измерительного датчика тока якоря тягового электродвигателя 3, преобразователь задающего напряжения 4, предназначенный для получения кусочно-линейного напряжения 2, которое сглаживает скачки задающего напряжения 1,блок задержки 5, аналогово-логический преобразователь 6, вырабатывающий напряжение управления , управляющее логическое устройство 7, формирующее дискретный сигнал ХНПХ начала перемещения ходовой педали, устройство импульсной модуляции 8, формирователь импульсов управления 9, полупроводниковый импульсный регулятор 10 и тяговый электродвигатель 11. Выход задающего устройства 1 подключен к первому входу преобразователя задающего напряжения 4 и к первому входу управляющего логического устройства 7, а выход преобразователя задающего напряжения - к первому входу аналогово-логического преобразователя 6. Ко второму входу аналогово-логического преобразователя 6 подключен выход узла обратных связей 2, вход которого подключен к первому выходу измерительного датчика тока якоря тягового электродвигателя 3. К выходу аналогово-логического преобразователя 6 подключен второй вход устройства управляющего логического устройства 7,первый выход которого подключен ко входу устройства импульсной модуляции 8, а второй выход - ко второму входу преобразователя задающего напряжения 4. Выход устройства импульсной модуляции 8 соединен со входом формирователя импульсов управления 9, выход которого подключен ко входу полупроводникового импульсного регулятора 10. Выход полупроводникового импульсного регулятора 10 подключен ко входу измерительного датчика тока якоря тягового электродвигателя 3, а второй выход измерительного датчика тока якоря тягового электродвигателя подключен к тяговому электродвигателю 11. Вход блока задержки 5 подключен ко второму выходу управляющего логического устройства 7, а выход - к третьему входу преобразователя задающего напряжения 4. Система (фиг. 1) работает следующим образом. Водитель с помощью ходовой педали, входящей в состав задающего устройства 1, определяет величину задающего напряжения 1, которое определяет желаемый пусковой ток якоря тягового электродвигателя. Управляющее логическое устройство 7 проверяет закрытие дверей троллейбуса, наличие нормальных напряжений питания и другие условия для начала движения. Если все необходимые условия соблюдаются, то управляющее логическое устройство 7 разрешает движение троллейбуса, создавая цепь для прохождения напряжения управления с выхода аналогово-логического преобразователя 6 на вход устройства импульсной модуляции 8. Если при выполнении этих условий водитель нажмет на ходовую педаль в задающем устройстве 1, то управляющее логическое устройство 7 сформирует дискретный сигнал ХНПХ начала перемещения ходовой педали, который также используется для включения силовых контакторов (не показаны). При этом дискретный сигнал ХНПХ начала перемещения ходовой педали поступает в блок задержки 5,который выдает в преобразователь задающего напряжения 4 дополнительный управляющий сигнал, задерживающий преждевременное нарастание выходного напряжения 2, которое преобразователя задающего напряжения 4. В результате воздействия управляющих сигналов по трем входам преобразователь задающего напряжения 4 при трогании троллейбуса с места вначале вырабатывает небольшое напряжение 22 нач, соответствующее крутящему моменту тягового электродвигателя минимальной величины, необходимой для выборки окружных люфтов в трансмиссии, и поддерживает это напряжение в течение 4 40712007.12.30 времени, необходимого для плавной (без ударов) выборки люфтов в трансмиссии (временная диаграмма на фиг. 2). При этом за счет действия обратной связи по току якоря тягового электродвигателя на выходе аналогово-логического преобразователя 6 устанавливается такое напряжение управления , которое, пройдя через управляющее логическое устройство 7, посредством устройства импульсной модуляции 8, формирователя импульсов управления 9 и посредством полупроводникового импульсного регулятора 10 поддерживает ток якоря и крутящий момент тягового электродвигателя 11 на означенном низком уровне. После выборки люфтов преобразователь преобразователя задающего напряжения 4 вырабатывает линейно нарастающее напряжение 2, скорость изменения которого соответствует допустимому темпу нарастания ускорения троллейбуса. Выходное напряжение 2 преобразователя задающего напряжения 4 поступает на аналогово-логический преобразователь 6, где оно сравнивается с созданным с помощью измерительного датчика тока якоря тягового электродвигателя 3 напряжением обратной связи по току якоря тягового электродвигателя, поступающим с выхода узла обратных связей 2. При этом благодаря действию обратной связи по току якоря тягового электродвигателя крутящий момент последнего будет нарастать в соответствии с ростом напряжения 2, подаваемого на вход аналоговологического преобразователя 6, где вырабатывается напряжение управления , которое,пройдя через управляющее логическое устройство, подается на вход устройства импульсной модуляции, в котором вырабатываются импульсные сигналы, модулированные по ширине. Эти импульсные сигналы обрабатываются в формирователе импульсов управления и посредством полупроводникового импульсного регулятора управляют током якоря тягового электродвигателя в функции напряжения управления , так что средний ток якоря становится пропорциональным задающему напряжению. Так как средний токякоря и развиваемый им крутящий момент являются функцией напряжения управления , то при достижении растущим напряжением 2 величины задающего напряжения 1 ток якоря и крутящий момент тягового электродвигателя установятся и будут поддерживаться на заданном водителем уровне. Если водитель изменит положение ходовой педали (задающее напряжение 1), то преобразователь задающего напряжения 4 выработает соответственно линейно нарастающее или падающее напряжение 2, на выходе аналогово-логического преобразователя 7 соответственно изменится напряжение управления , что приведет к изменению токав якоре электродвигателя 11 и к плавному изменению величины крутящего момента последнего. Благодаря преобразователю задающего напряжения 4, который преобразует задающее напряжение 1 от задающего устройства 1 в кусочно-линейное напряжение 2, наклонные участки которого определяют допустимый темп изменения ускорения или замедления движения троллейбуса, обеспечивается повышение комфортности перевозки пассажиров(без резких рывков и толчков). Это достигается автоматически, независимо от плавности нажимания водителем на педаль хода. Кроме того, поддержание напряжения 2 преобразователем задающего напряжения 4 в течение выборки механических люфтов на постоянном низком уровне 2 нач, соответствующем крутящему моменту тягового электродвигателя минимальной величины, необходимой для выборки окружных люфтов в трансмиссии, исключает ударные нагрузки при трогании с места и увеличивает долговечность трансмиссии троллейбуса. При конкретной реализации предлагаемой системы управления наклонные участки кусочно-линейного напряжения 2 определяют скорость нарастания (убывания) токаякоря тягового электродвигателя 11. Например, при использовании электродвигателя ДК-211 БМ мощностью 170 кВт скорости изменения токапринимаются равными 400100 А/с. Для разгона троллейбуса с места кусочно-линейное напряжение 2 выдерживается в течение времени выборки механических люфтов в трансмиссии (0,4-0,5 с) на постоянном уровне 2 нач, соответствующем токуякоря электродвигателя 8 в пределах 5020 А, достаточному для выборки окружных люфтов в трансмиссии. 5 40712007.12.30 Техническая реализация преобразователя задающего напряжения 4 и блока задержки 5(фиг. 1) может быть различной. На фиг. 3 представлена схема одного из возможных вариантов их совместной реализации. Преобразователь задающего напряжения 4 (фиг. 3) содержит операционные усилители 1-3, диоды 1-3, резисторы 1-11 и конденсаторы С 1-С 3. Блок задержки 5 содержит операционный усилитель 4, диоды 4-6, резисторы 12-16 и конденсаторы С 4, С 5. В исходном состоянии преобразователя задающего напряжения 4 (фиг. 3) в контрольных точках А, В и С имеются нулевые напряжения. На инвертирующий вход усилителя 4 подано положительное напряжение с делителя 14, 15, поэтому на выходе этого усилителя будет отрицательное напряжение, закрывающее диоды 4 и 6. При нажатии водителем на педаль хода троллейбуса вначале под действием сигнала от задающего устройства 1 (фиг. 1) устройство логического управления 7 (фиг. 1) вырабатывает положительное напряжение дискретного сигнала ХНПХ начала перемещения ходовой педали, которое поступает на вход 12 схемы (фиг. 3). При дальнейшем нажатии на педаль хода на вход 13 от задающего устройства 1 (фиг. 1) поступит положительное задающее напряжение 1, пропорциональное глубине нажатия педали. Положительное напряжение с входа 12 поступит на инвертирующий вход усилителя 2. Он выполнен с малой постоянной времени (только для обеспечения помехоустойчивости), поэтому в точке С быстро установится отрицательное напряжение, которое через диод 2 и резистор 7 поступит на вход усилителя 3. Постоянная времени 7, С 2 также невелика, поэтому напряжение в точке В начнет быстро нарастать. Растущее напряжение с точки В через резистор обратной связи 9 поступит на неинвертирующий вход усилителя 2 и переключит его так, что в точке С установится положительное напряжение, которое закроет диод 2. В результате описанных процессов на выходе усилителя 3 (в точке В) зафиксируется небольшое начальное напряжение 22 нач,которое обеспечит малый токи момент тягового электродвигателя 11 (временная диаграмма на фиг. 2). Положительный перепад напряжения сигнала ХНПХ с входа 12 пройдет также через конденсатор С 4 на вход усилителя 4 и переключит его в состояние с положительным выходным напряжением. Благодаря диоду 6 в точкезафиксируется положительное напряжение, равное напряжению на открытом диоде (примерно 1 В). Это напряжение через диод 4 поступит в точку А и зафиксирует там нулевое напряжение (падение напряжения на открытом диоде 4 также около 1 В). В результате интегрирования нулевого входного напряжения на выходе усилителя 3 будет сохраняться достигнутое ранее начальное напряжение 22 нач. Существенное нажатие водителем на педаль хода приведет к поступлению на вход 13 положительного задающего напряжения 1, пропорционального глубине нажатия педали. Постоянная времени 1, 1 выбрана небольшой (только для обеспечения помехоустойчивости), а коэффициент усиления усилителя 1 установлен большим, поэтому на выходе усилителя 1 установится отрицательное напряжение. Однако это отрицательное напряжение не повлияет на состояние усилителя 3, так как в точке А усилителем 4 и диодами 4 и 6 пока поддерживается нулевое напряжение. Поскольку конденсатор С 4 и резистор 13 представляют собой дифференцирующую цепочку, то положительное напряжение, возникшее на неинвертирующем входе усилителя 4 от перепада напряжения сигнала ХНПХ на входе 12, будет постепенно уменьшаться. Когда напряжения на обоих входах усилителя 4 сравняются, на выходе этого усилителя восстановится исходное отрицательное напряжение. Постоянная времени С 4,13 выбрана такой, чтобы продолжительность положительного импульса в точкебыла в пределах 0,4-0,5 с, в течение которых происходит выборка максимального люфта в трансмиссии. 6 40712007.12.30 Благодаря тому что в точке А в течение времени 0,4-0,5 с поддерживается нулевое напряжение, на выходе интегратора 3 сохранится установившееся положительное напряжение 22 нач, несмотря на наличие отрицательного напряжения на выходе усилителя 1, которое обусловлено поступлением на вход 13 напряжения 1 установки от нажатой педали хода. После истечения времени 0,4-0,5 с на выходе усилителя 4 устанавливается отрицательное напряжение, которое закрывает диод 4. С этого времени в точке А устанавливается отрицательное напряжение, поступающее с выхода усилителя 1, а на выходе интегратора 3 начнется линейное нарастание напряжения 2 (временная диаграмма на фиг. 2). Скорость нарастания этого напряжения определяется параметрами резисторов 4-6 и конденсатора С 2 и не зависит от величины скачка задающего напряжения 1 на входе 13, вызванного нажатием водителем педали хода. Этим исключается резкий рывок троллейбуса. Линейно растущее напряжение 2 с выхода интегратора 3 поступает через резистор 2 на неинвертирующий вход усилителя 1 и сравнивается с задающим напряжением 1 на входе 13. Когда сравниваемые напряжения окажутся равными, усилитель 1 переключается и на его выходе напряжение становится положительным, а напряжение 2 на выходе интегратора 3 начнет линейно уменьшаться. В результате действия отрицательной обратной связи, охватывающей усилители 1 и 3, в точке В установится напряжение, равное задающему напряжению 1 на входе (фиг. 2). При изменении водителем положения педали хода в сторону уменьшения задающего напряжения 1 произойдет линейное уменьшение напряжения 2 на выходе интегратора 3 (в точке В) до достижения равенства с новым значением задающего напряжения 1(фиг. 2). В выбранном прототипе при трогании троллейбуса с места напряжениеП с выхода 2 преобразователя задающего напряжения 4, а также токв якоре тягового электродвигателя 11 и развиваемый им крутящий момент нарастают так, как показано на фиг. 2 штрихпунктирной линией, вследствие чего к моменту выборки люфта в трансмиссии они достигают больших величин. Это вызывает ударные динамические нагрузки в трансмиссии. В предлагаемой системе выборка люфта в трансмиссии производится при малом напряжении 22 нач и, соответственно, при малом токеи крутящем моменте тягового электродвигателя 11. Это исключает ударные динамические нагрузки и поломку деталей трансмиссии, повышает ее долговечность. Входящие в состав предлагаемой системы управления тяговым электродвигателем троллейбуса преобразователь задающего напряжения 3 и блок задержки 4 могут быть использованы не только в тяговом электроприводе, но и в электроприводе общепромышленных механизмов, для которых желателен щадящий режим выбора окружных люфтов в кинематической цепи при пуске. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: B60L 15/20, B60L 9/00
Метки: электродвигателем, управления, система, троллейбуса, тяговым
Код ссылки
<a href="https://by.patents.su/8-u4071-sistema-upravleniya-tyagovym-elektrodvigatelem-trollejjbusa.html" rel="bookmark" title="База патентов Беларуси">Система управления тяговым электродвигателем троллейбуса</a>
Устройство управления трехфазным асинхронным электродвигателем
Номер патента: 925
Опубликовано: 15.12.1995
Авторы: Герасимович Леонид Степанович, Липницкий Леонид Александрович, Синяков Анатолий Леонидович, Каратинский Виктор Андреевич
Метки: управления, трехфазным, устройство, асинхронным, электродвигателем
Текст:
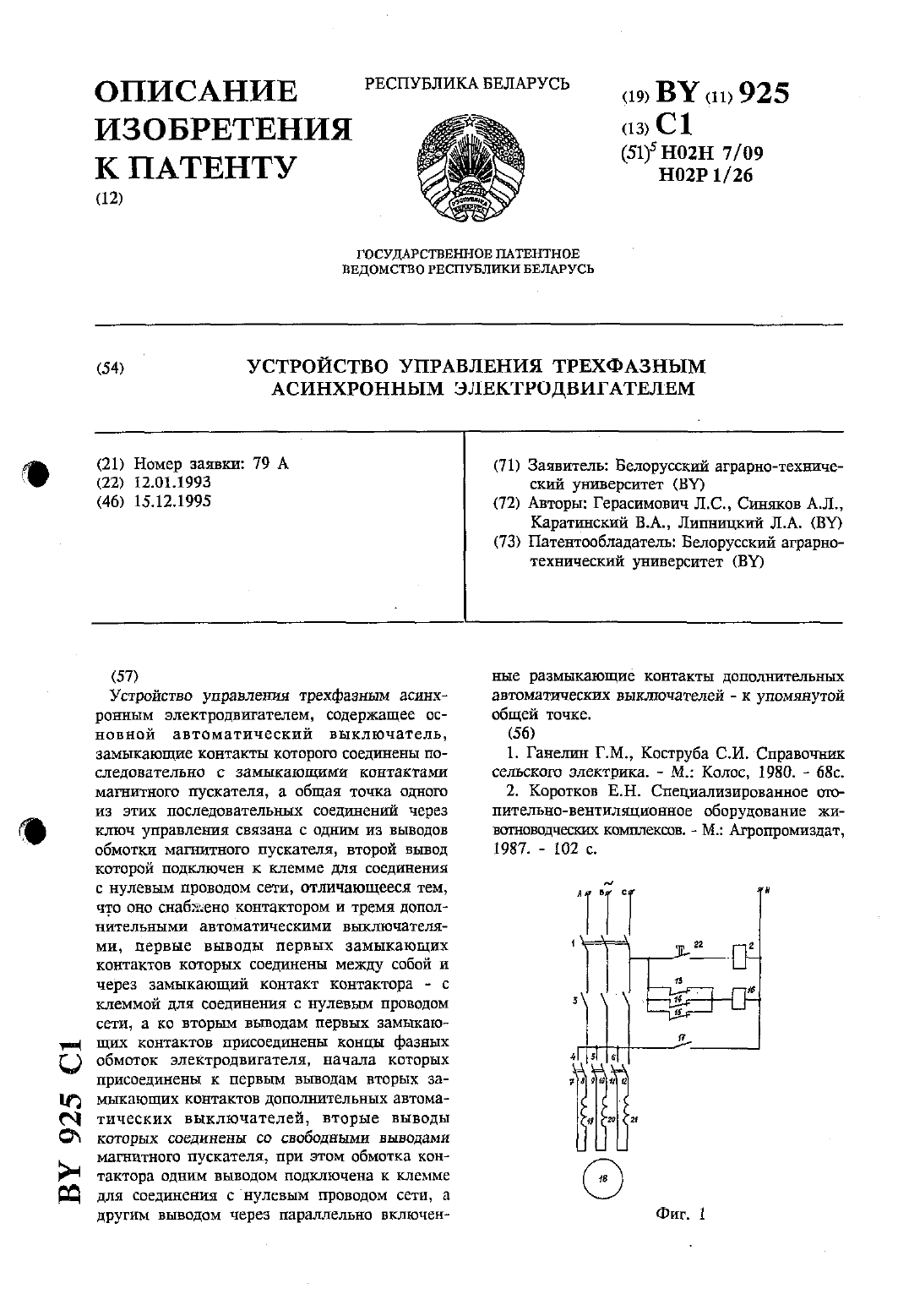
...дополнительных автоматических выключателей, вторые выводы которых соединены со свободными выводами магнитного пускателя, при этом обмотка контактора одним выводом подключена к клемме для соединения с нулевым проводом сети, а другим выводом через параллельно включенные размыкающие контакты дополнительных автоматических вьпопочателей - к общей упомянутой точке.Использование предлагаемого устройства обеспетщвает непрерывную работу электродви...
Следящая система автоматического управления с компенсацией неизмеряемых экспоненциально-коррелированных возмущений

Номер патента: U 1170
Опубликовано: 30.12.2003
Авторы: Цеховой Аркадий Евгеньевич, Розсудовский Сергей Викторович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: следящая, управления, система, неизмеряемых, автоматического, компенсацией, возмущений, экспоненциально-коррелированных
Текст:
...задающее устройство, первое сравнивающее устройство, усилитель, второе сравнивающее устройство, усилитель мощности, двигатель, рабочий орган, а также параллельное корректирующее устройство и датчик обратной связи, при этом выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи к второму входу первого сравнивающего устройства, и отличается от...
Следящая система автоматического управления с компенсацией неизмеряемых скачкообразных возмущений
Номер патента: U 1002
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Ганэ Вадим Арведович
МПК: G05B 11/01
Метки: автоматического, следящая, компенсацией, скачкообразных, управления, система, неизмеряемых, возмущений
Текст:
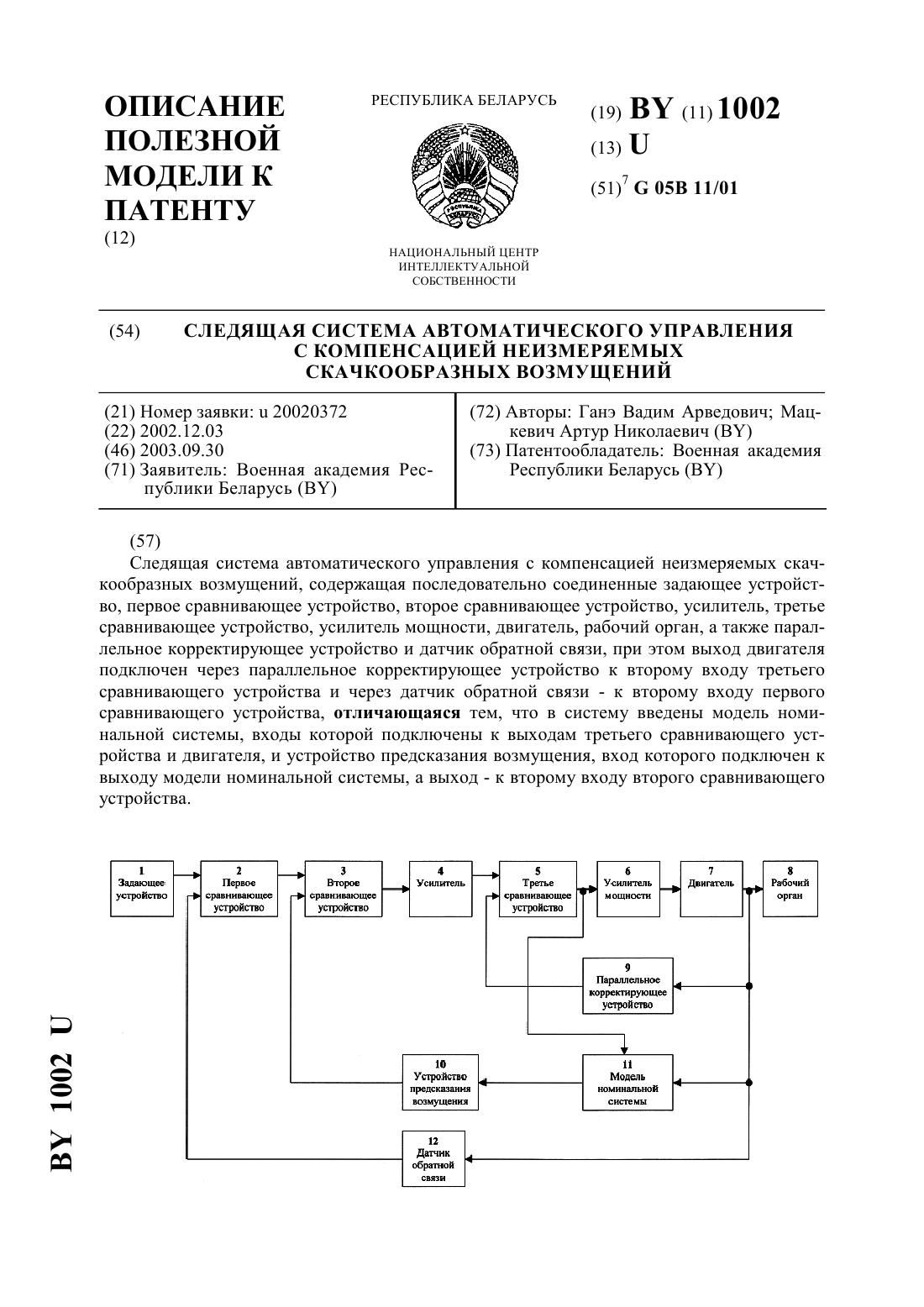
...второму входу первого сравнивающего устройства, и отличается от прототипа тем, что в систему введены модель номинальной системы, входы которой подключены к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фигуре представлена функциональная схема ССАУ с компенсацией неизмеряемых...
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону

Номер патента: U 1000
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Санько Андрей Анатольевич
МПК: G05B 11/01
Метки: автоматического, возмущений, компенсацией, квадратичному, следящая, закону, управления, неизмеряемых, система, изменяющихся
Текст:
...сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону, а на фиг. 2 - структурная схема устройства предсказания возмущения. ССАУ содержит задающее устройство 1, первое...
Следящая система автоматического управления с компенсацией неизмеряемых линейно изменяющихся во времени возмущений
Номер патента: U 1001
Опубликовано: 30.09.2003
Авторы: Сончик Дмитрий Михайлович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: система, следящая, неизмеряемых, линейно, изменяющихся, управления, возмущений, автоматического, времени, компенсацией
Текст:
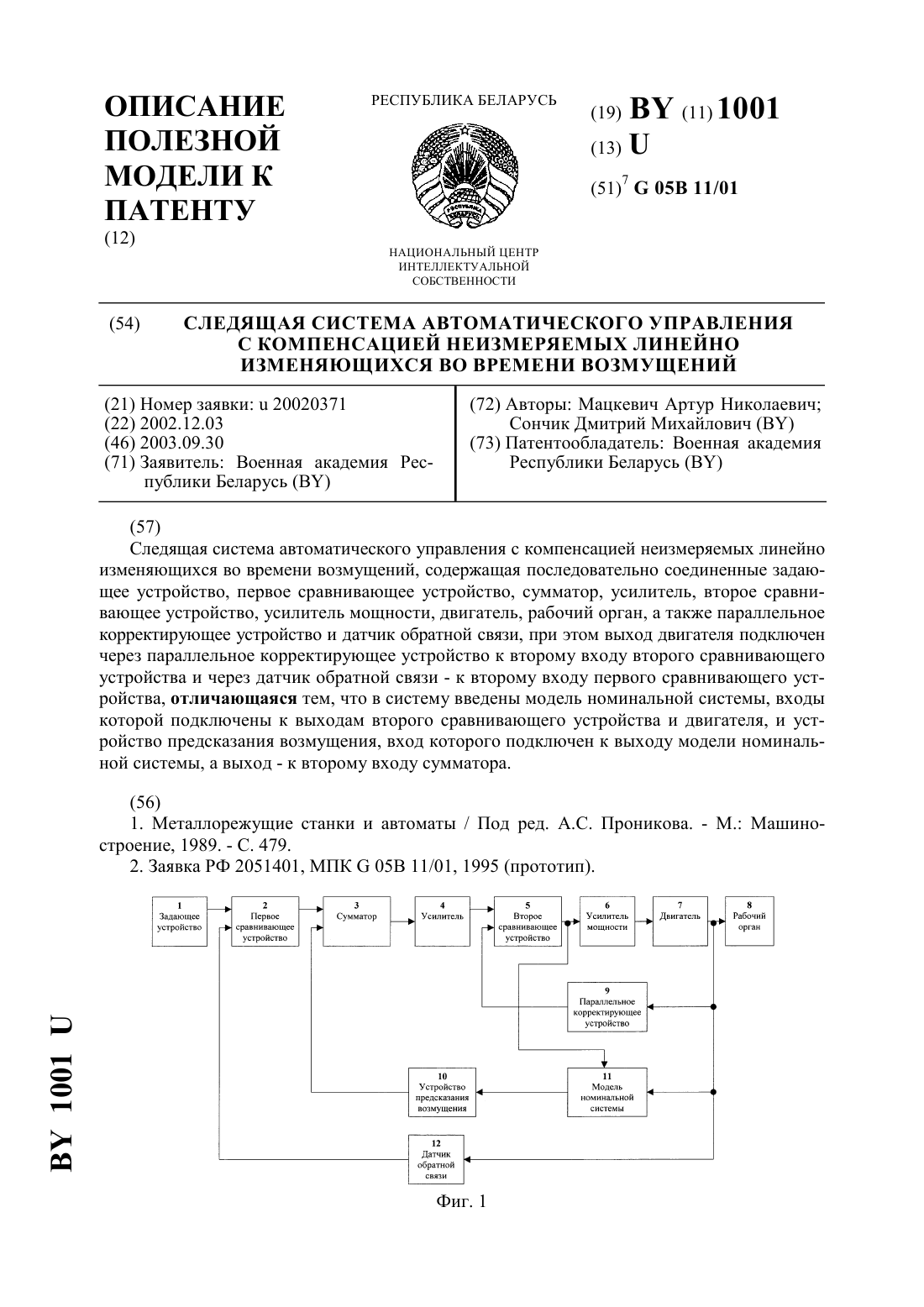
...введены модель номинальной системы, входы которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых линейно изменяющихся во времени возмущений, а на фиг. 2 - структурная схема устройства предсказания возмущения....
Предыдущий патент: Устройство для оценки функции равновесия человека
Следующий патент: Объектив
Случайный патент: Способ прижизненного определения биогенных аминов, их предшественников и метаболитов в головном мозге животного