Устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей
Номер патента: U 1368
Опубликовано: 30.06.2004
Авторы: Дедков Андрей Иванович, Зайцев Валентин Андреевич, Плавинский Валерий Антонович, Зуев Владимир Павлович

Текст
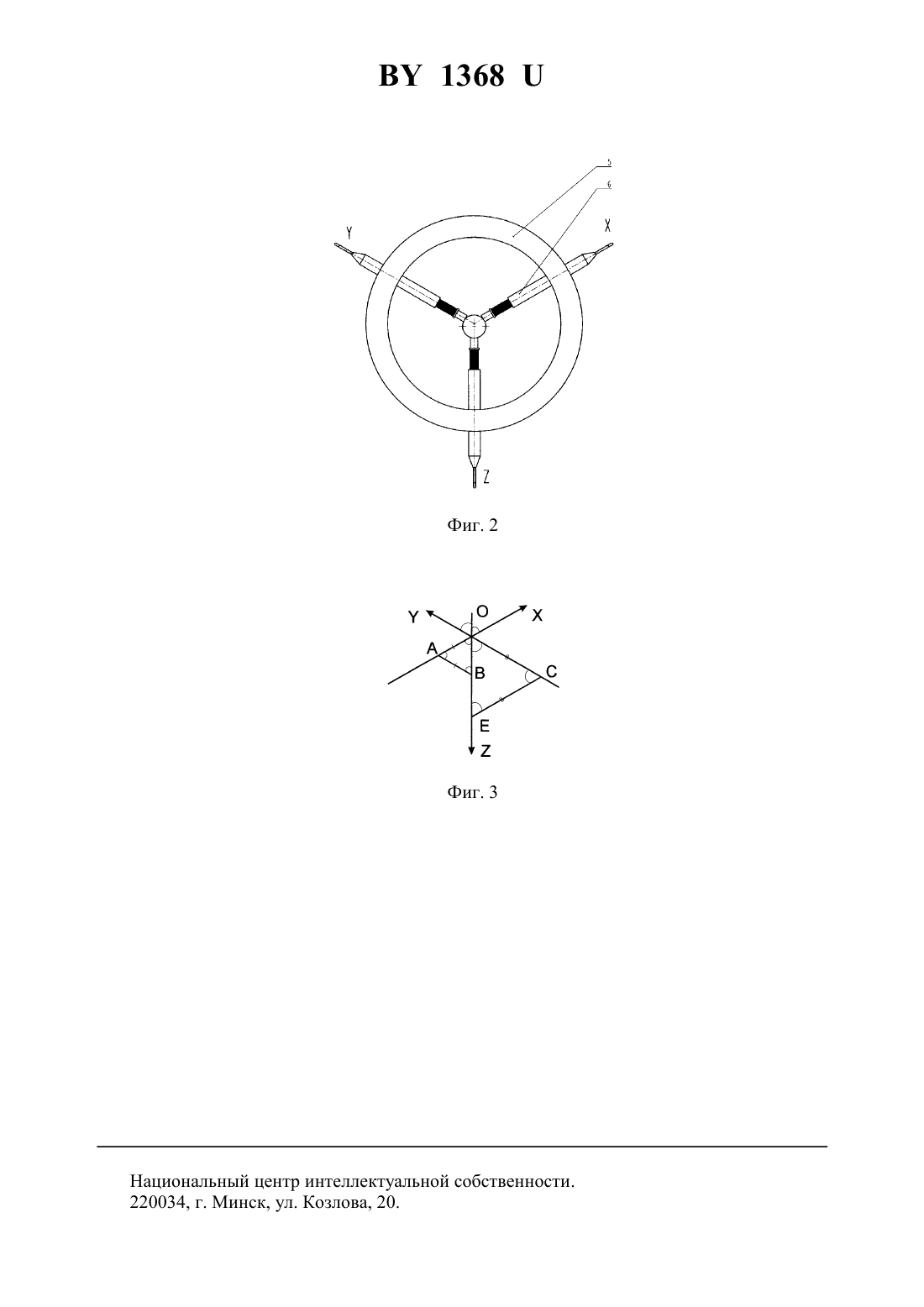
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ НАРУЖНЫХ ЦИЛИНДРИЧЕСКИХ И СЛОЖНОПРОФИЛЬНЫХ ПОВЕРХНОСТЕЙ(71) Заявитель Научно-производственное республиканское унитарное предприятие КБТЭМ-ОМО(72) Авторы Зайцев Валентин Андреевич Зуев Владимир Павлович Плавинский Валерий Антонович Дедков Андрей Иванович(73) Патентообладатель Научно-производственное республиканское унитарное предприятие КБТЭМ-ОМО(57) 1. Устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей, содержащее основание с направляющими, каретку, установленную на направляющих с возможностью перемещения вдоль продольной оси контроля,механизм крепления и вращения контролируемой детали, установленный на основании,блок обработки сигналов и три преобразователя линейных перемещений, подключенных к блоку обработки сигналов, отличающееся тем, что оно содержит полый держатель, закрепленный на каретке, а преобразователи линейных перемещений установлены на полом держателе так, что их оси измерений расположены в плоскости, перпендикулярной оси контролируемой детали равномерно по кругу и пересекаются в точке, совпадающей с осью механизма крепления и вращения детали, а блок обработки сигналов подключен к компьютерной системе суммирования показаний преобразователей и вычисления отклонений формы контролируемой поверхности от расчетной образцовой. 13682. Устройство по п. 1, отличающееся тем, что образцовой линией для контроля формы наружной поверхности вдоль ее оси является математическая прямая, проведенная через центры измеренных наружных сечений по краям контролируемой детали. Полезная модель относится к контрольно-измерительной технике и может быть использована для контроля отклонений от номинальной геометрической формы наружных цилиндрических и сложнопрофильных поверхностей. Известно устройство для измерения некруглостей 1, содержащее измеритель линейных перемещений, радиальные базирующие самоустанавливающиеся опоры, расположенные симметрично относительно измерителя линейных перемещений и измерительный датчик отклонения от круглости профиля поперечного сечения вала. Это устройство предназначено для измерения одного геометрического размера - некруглости диаметра обработанной детали и для получения данных о форме поверхности, а для отклонения оси вращения детали требуется проводить дополнительные измерения с применением соответствующего оборудования. Наиболее близким прототипом является устройство для измерения геометрической формы номинально круглой цилиндрической детали 2. Устройство содержит накладной кругломер с самоустанавливающимися опорами, в корпусе которого установлен основной измерительный датчик, дополнительный измерительный датчик, установленный на вертикальной стойке, связанной со станиной, и блок обработки сигналов, связанный с измерительными датчиками, при этом дополнительный измерительный датчик установлен с упором в корпус кругломера. Недостатком такой конструкции является ограниченная точность измерения из-за того, что в качестве измерительной базы используют саму измеряемую поверхность. Кроме того, в процессе измерений не известны точное положение центра контролируемой геометрической формы и непрямолинейность продольных перемещений датчиков,что также приводит к искажению результатов контроля. Задача, на решение которой направлено заявляемое устройство, состоит в повышении точности контроля геометрических форм наружных цилиндрических, а также сложнопрофильных поверхностей. Поставленная задача достигается тем, что устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей содержит основание с направляющими, каретку, установленную на направляющих с возможностью перемещения вдоль продольной оси контроля, механизм крепления и вращения контролируемой детали,установленный на основании, блок обработки сигналов, три преобразователя линейных перемещений, подключенные к блоку обработки сигналов и установленные радиально на полом закрепленном на каретке держателе так, что их оси измерений, расположенные в плоскости, перпендикулярной оси контролируемой детали равномерно по кругу, пересекаются в точке, совпадающей с осью механизма вращения, а блок обработки сигналов подключен к компьютерной системе суммирования показаний преобразователей и вычисления отклонений формы контролируемой поверхности от расчетной образцовой. Образцовой линией для контроля формы поверхности вдоль ее оси является математическая прямая, проведенная через центры измеренных наружных сечений по краям контролируемой детали. Суть устройства поясняется чертежами, где 2 1368 на фиг. 1 приведена конструкция устройства для контроля наружных цилиндрических и сложнопрофильных поверхностей на фиг. 2 приведено расположение преобразователей линейных перемещений по отношению к контролируемой поверхности (показана пунктиром) на фиг. 3 приведена принципиальная геометрическая схема трехканального контроля. Устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей содержит основание 1 (фиг. 1) с направляющими 2, каретку 3,установленную на направляющих 2 с возможностью перемещения вдоль продольной оси контроля, механизм 4 крепления и вращения контролируемой детали, установленный на основании 1, полый держатель 5, закрепленный на каретке 3, три преобразователя 6 линейных перемещений, установленные на полом держателе 5 так, что их оси измерений расположены в плоскости, перпендикулярной оси контролируемой детали равномерно по кругу, и пересекаются в точке, совпадающей с осью механизма 4 крепления и вращения контролируемой детали, и блок обработки сигналов 7, подключенный к преобразователям линейных перемещений 6 и компьютерной системе 8 суммирования показаний преобразователей 6 и вычисления отклонений формы контролируемой поверхности от расчетной образцовой. Устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей работает следующим образом. После установки контролируемой детали (на чертеже показана условно пунктиром) на механизм 4 ее крепления и вращения (фиг. 1) преобразователи линейных перемещений 6 передвигаются в держателе 5 до контакта с наружной контролируемой поверхностью с некоторым натягом и фиксируются (фиг. 2), при этом для упрощения последующих вычислений показания преобразователей 6 электронным образом устанавливаются в нулевое исходное состояние с индикацией на пульте блока обработки сигналов 7. Если предположить, что контролируемая цилиндрическая поверхность идеальна и ее центр совпадает с осью вращения, то при идеальном вращении этой поверхности относительно трех преобразователей 6 их показания изменяться не будут и сумма показаний будет равна нулю. В реальной ситуации предполагаемый центр контролируемой поверхности не совпадает с осью ее вращения, положение которой также имеет нерегулярные случайные отклонения. Кроме того, направляющие 2, по которым перемещается каретка 3, непрямолинейны и непараллельны продольной оси контролируемой поверхности. При повороте контролируемой детали на некоторый угол показания преобразователей 6 изменятся (фиг. 3) по отношению к исходным нулевым тогда, допустим, что отрезок ОА соответствует показанию преобразователя 6 по оси(Х) и является стороной равностороннего (имеющего три равных угла) треугольника ОАВ, в котором сторона ОВ соответствует показанию преобразователя по оси(1) отрезок ОС соответствует показанию преобразователя 6 по осии является стороной равностороннего треугольника ОСЕ, в котором сторона ОЕ соответствует показанию преобразователя по оси(2). При условии, что показание преобразователя 6 имеет знак плюс, если его измерительный шток входит в преобразователь, и имеет знак минус, если измерительный шток выходит из него, а начальной (базовой) измерительной осью является координата , в приведенном примере соотношения между показаниями трех преобразователей 6 выразятся (в абсолютных значениях) 1212, тогда, с учетом знаков показаний преобразователей по координатам , ,их сумма выразится 12 - Х -0 или - Х -0, т.е. алгебраическая сумма показаний преобразователей будет равна нулю. 3 1368 В общем случае равенство примет вид (в зависимости от знаков показаний преобразователей)0. Таким образом, при трехканальном контроле не существует зависимости ошибок контроля от положения предполагаемой оси контролируемой поверхности относительно оси ее вращения. Электрические сигналы от преобразователей линейных перемещений 6 формируются блоком обработки сигналов 7 в виде, удобном для работы компьютерной системы 8. С целью повышения достоверности результатов контроля при последующем вращении контролируемой поверхности, за базовые измерительные оси последовательно принимаются координатыи , после чего результаты измерений усредняются и суммируются. Для этого целесообразно выполнить три оборота контролируемой детали. Полученные данные сравниваются с математически заданной образцовой геометрической формой контролируемой поверхности, воспроизведенной компьютерной системой 8, которая анализирует отклонение от нуля суммы показаний преобразователей 6 в данном положении по углу поворота контролируемой детали. При этом вычисляются координаты центра контролируемого сечения (например, как центр тяжести фигуры). Далее, на экране дисплея компьютерной системы 8 строится фактическая кривая контролируемой поверхности, наложенная на графическую математическую номинальную геометрическую форму, что позволяет визуально определить имеющиеся отклонения. При необходимости эта информация документируется в графическом или цифровом виде. При контроле поверхности сложнопрофильной формы, заведомо отличающейся от цилиндрической, алгоритм контроля аналогичен. При необходимости контроля отклонений продольной оси цилиндрической поверхности от номинальной производят компьютерное построение математической образцовой прямой, проходящей через центры крайних сечений, и вычисления отклонений центров остальных сечений по отношению к этой прямой. Построение отклонений контролируемой цилиндрической формы от номинальной(конусность, овальность, кривизна и т.п. ) также производят на основе контроля поверхности по сечениям вдоль ее оси. Данное конструктивное решение полезной модели не ограничивается лишь вертикальной компоновкой. Оно может быть реализовано как в горизонтальном, так и в других исполнениях. Предлагаемая конструкция полезной модели не только повышает точность контроля,но и снижает точностные требования к элементам конструкции и их взаимному расположению. Заявленное техническое решение обеспечивает повышение точности контроля отклонений от номинальных геометрических форм наружных цилиндрических и сложнопрофильных поверхностей за счет последовательного контроля формы поперечных сечений реальной детали вдоль ее оси одновременным измерением положения вращаемой контролируемой поверхности с помощью трех равномерно расположенных в радиальных направлениях преобразователей линейных перемещений, жестко связанных между собой, и сравнением компьютерным способом суммарных результатов измерений с математически заданной номинальной образцовой геометрической формой, а также вычислением фактического положения центров контролируемых сечений компьютерного построения математической образцовой прямой, проходящей через центры крайних сечений, вычисления отклонений центров остальных сечений по отношению к этой прямой и отклонений формы контролируемой поверхности от номинальной образцовой. 4 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01B 5/20
Метки: цилиндрических, контроля, устройство, сложнопрофильных, формы, геометрической, поверхностей, наружных
Код ссылки
<a href="https://by.patents.su/5-u1368-ustrojjstvo-kontrolya-geometricheskojj-formy-naruzhnyh-cilindricheskih-i-slozhnoprofilnyh-poverhnostejj.html" rel="bookmark" title="База патентов Беларуси">Устройство контроля геометрической формы наружных цилиндрических и сложнопрофильных поверхностей</a>
Способ упрочнения ультразвуком наружных цилиндрических поверхностей деталей
Номер патента: 678
Опубликовано: 30.06.1995
Авторы: Пасах Е. В., Кукин С. Ф.
МПК: B24B 39/02
Метки: цилиндрических, наружных, поверхностей, упрочнения, способ, ультразвуком, деталей
Текст:
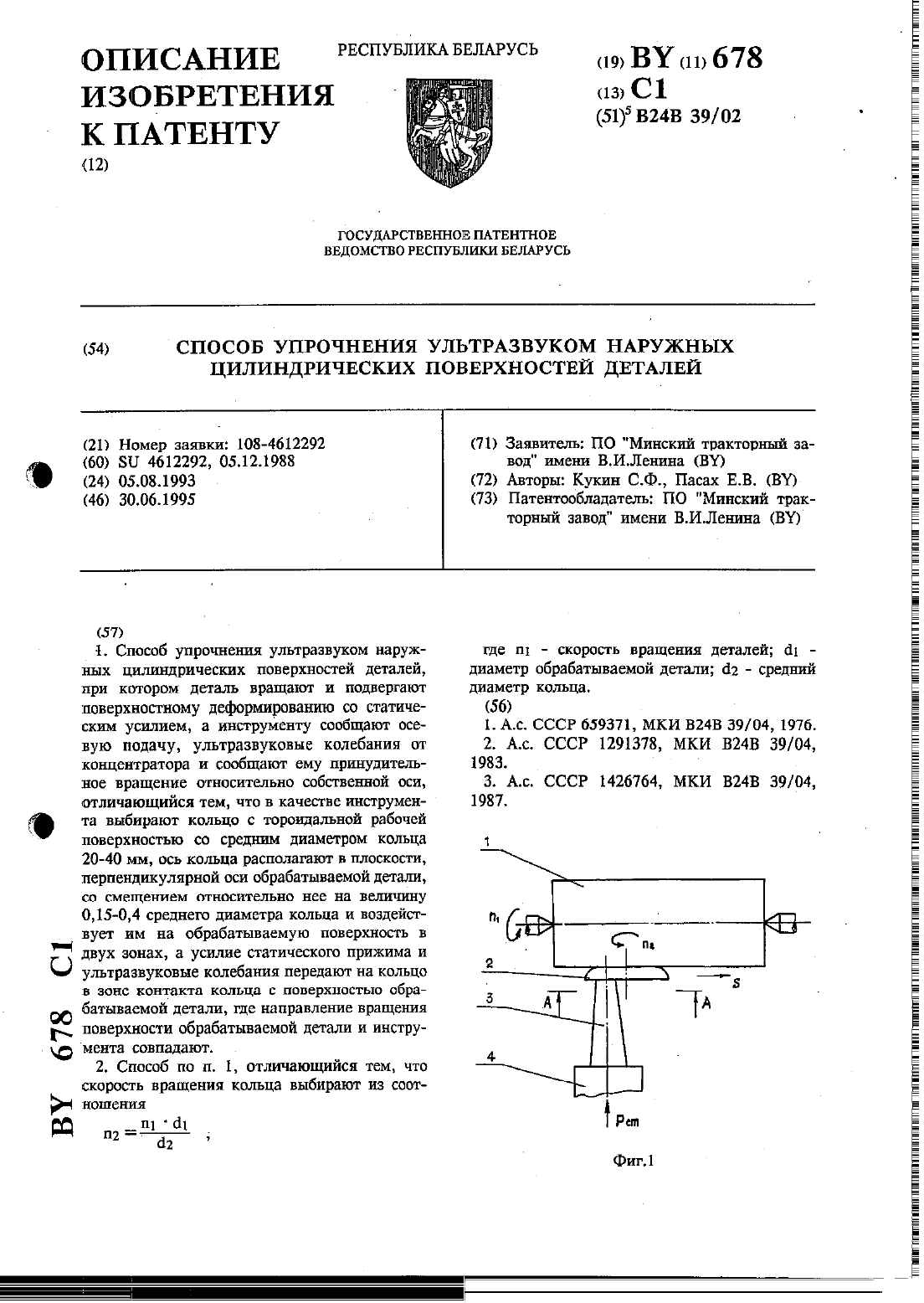
...деталь 1 диаметром с 11 вращают со скоростью щ в контакте с вращающимся со скоростью п и перемещающимся вдоль с подачей 8 кольцом 2 с тороидальной рабочей поверхностью и средним диаметром с 12, ось которого расположена от оси детали 1 на расстоянии 11. С обратной стороны кольца 2 по оси концентратора 3, проходящей через зону контакта кольца с деталью, где направление перемещения обрабатываемой поверхности и инструмента (кольца 2)...
Устройство для активного контроля кривизны выпуклых сферических поверхностей

Номер патента: 4585
Опубликовано: 30.09.2002
Авторы: Козерук Альбин Степанович, Федорцев Ростислав Валерьевич, Федорцев Валерий Александрович, Филонова Марина Игоревна
МПК: B24B 49/06, B24B 49/00
Метки: устройство, сферических, выпуклых, поверхностей, активного, кривизны, контроля
Текст:
...исходная кривизна которой равна кривизне контактного щупа и противоположна ей по знаку, при этом контактный щуп связан с одной из клемм измерительного прибора, вторая клемма которого связана с формообразующим инструментом, причем для удержания контактного щупа от вращения механизм контроля содержит дугообразную скобу, подвижно связанную с поводком станка. На чертеже показано устройство для контроля кривизны выпуклой сферической...
Устройство для активного контроля кривизны вогнутых сферических поверхностей
Номер патента: 4584
Опубликовано: 30.09.2002
Авторы: Федорцев Ростислав Валерьевич, Козерук Альбин Степанович, Филонова Марина Игоревна, Федорцев Валерий Александрович
МПК: B24B 49/06, B24B 49/00
Метки: поверхностей, устройство, активного, вогнутых, сферических, кривизны, контроля
Текст:
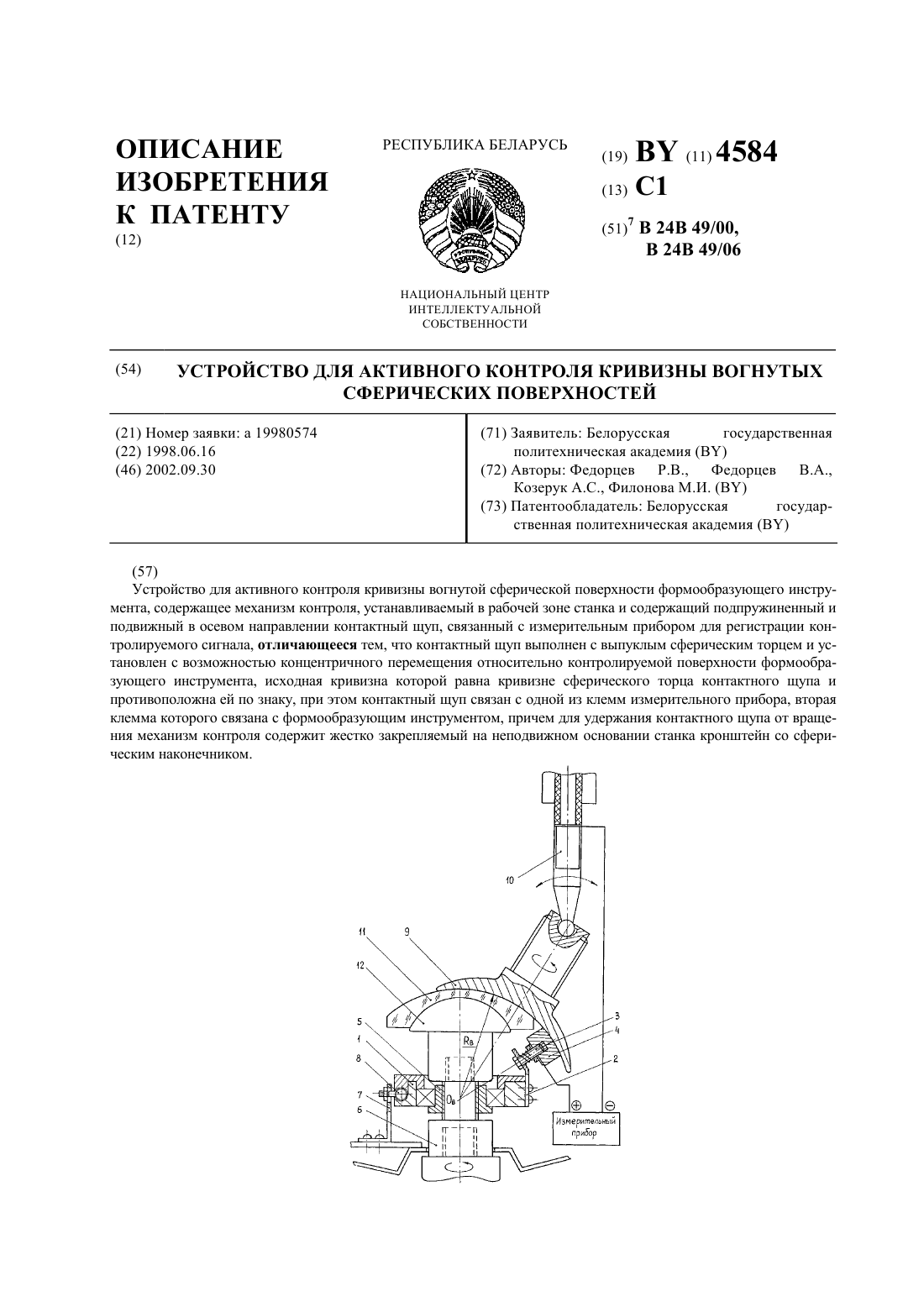
...прибора, вторая клемма которого связана с формообразующим инструментом, причем для удержания контактного щупа от вращения механизм контроля содержит жестко закрепленный на неподвижном основании станка кронштейн со сферическим наконечником. На чертеже показано устройство для контроля кривизны вогнутой сферической поверхности формообразующего инструмента. Устройство состоит из стакана 1, на котором через кронштейн 2 с регулирующим элементом 3...
Способ обработки наружных поверхностей деталей машин
Номер патента: 5643
Опубликовано: 30.12.2003
Авторы: Сакевич Валерий Николаевич, Угодников Андрей Валерьевич, Булавин Владимир Алексеевич, Олехнович Валентин Станиславович, Клубович Владимир Владимирович
МПК: B24B 39/00
Метки: машин, наружных, обработки, способ, поверхностей, деталей
Текст:
...имеющие отверстия типа маслоподающих отверстий на шейках коленчатых валов. Осуществляя подачу цилиндрического инструмента вдоль образующей детали в одном направлении до конца обрабатываемого участка, а затем в противоположном, не меняя направления вращения детали, тем самым наносим ромбовидньй микрорельеф. Таким образом, для повышения износостойкости трущихся деталей в известном способе обработки наружных поверхностей деталей машин...
Устройство для электроконтактной наплавки внутренних цилиндрических поверхностей деталей
Номер патента: U 943
Опубликовано: 30.09.2003
Авторы: Широкий Игорь Владимирович, Сосновский Алексей Валерьевич, Кашицин Леонид Павлович, Гафо Юрий Натанович
МПК: B23K 11/06
Метки: электроконтактной, наплавки, внутренних, устройство, деталей, поверхностей, цилиндрических
Текст:
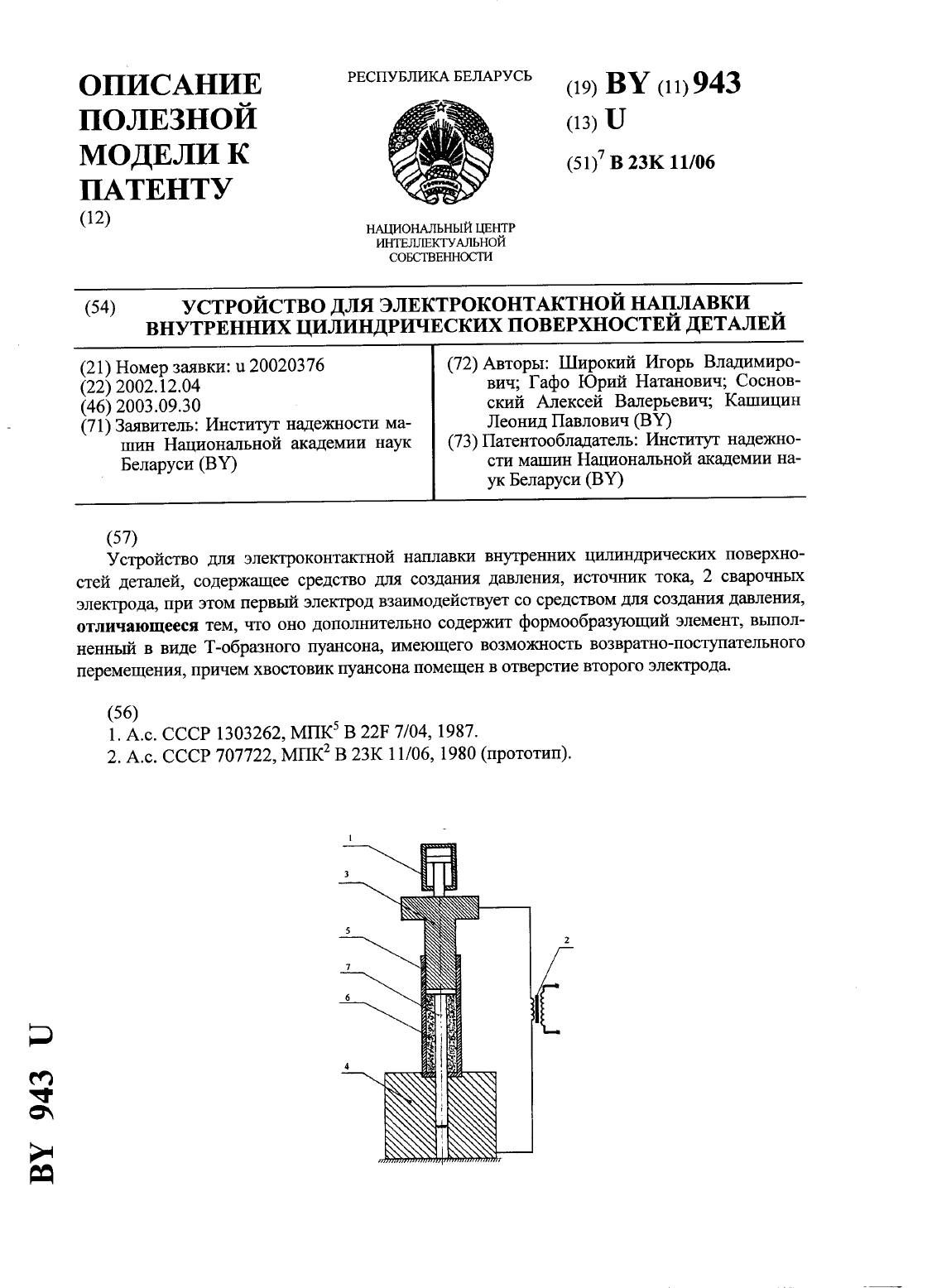
...средство для создания давления, источник тока, 2 сварочных электрода, при этом первый электрод взаимодействует со средством для создания давления, отличающееся тем, что оно дополнительно содержит формообразующий элемент, выполненный в виде Т - образного пуансона,имеющего возможность возвратно-поступательного перемещения. Причем хвостовик пуансона помещен в отверстие второго электрода. На чертеже представлена схема предлагаемого...
Предыдущий патент: Комплект раскрепляющего устройства
Следующий патент: Установка получения циклогексанола-ректификата
Случайный патент: Способ получения износостойкого покрытия