Система рулевого управления автопоезда
Номер патента: U 6611
Опубликовано: 30.10.2010
Авторы: Высоцкий Михаил Степанович, Суша Сергей Аркадьевич, Гайсенок Иван Валентинович, Харитончик Сергей Васильевич, Кочетов Сергей Иванович, Куприенко Никита Олегович
Текст
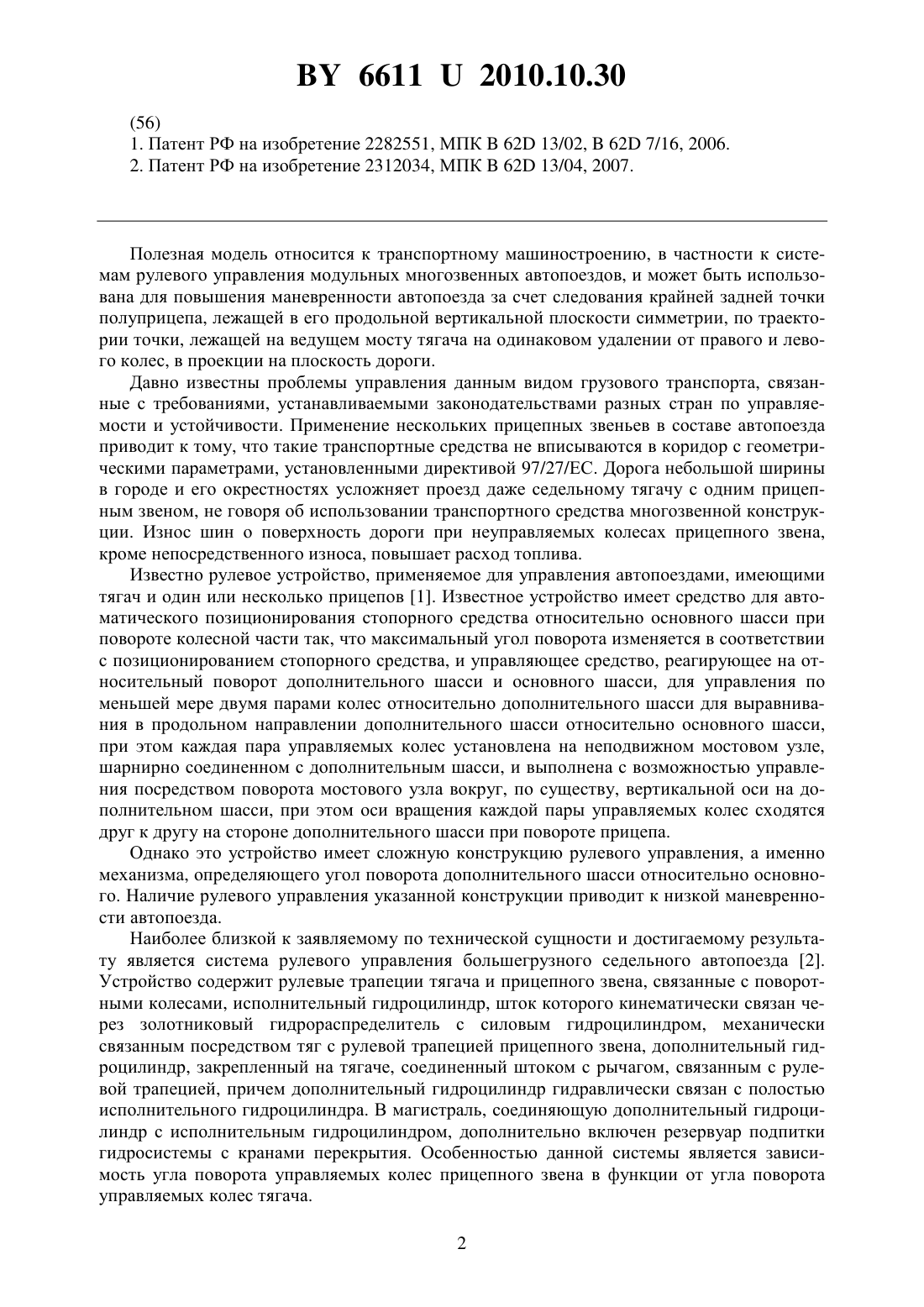
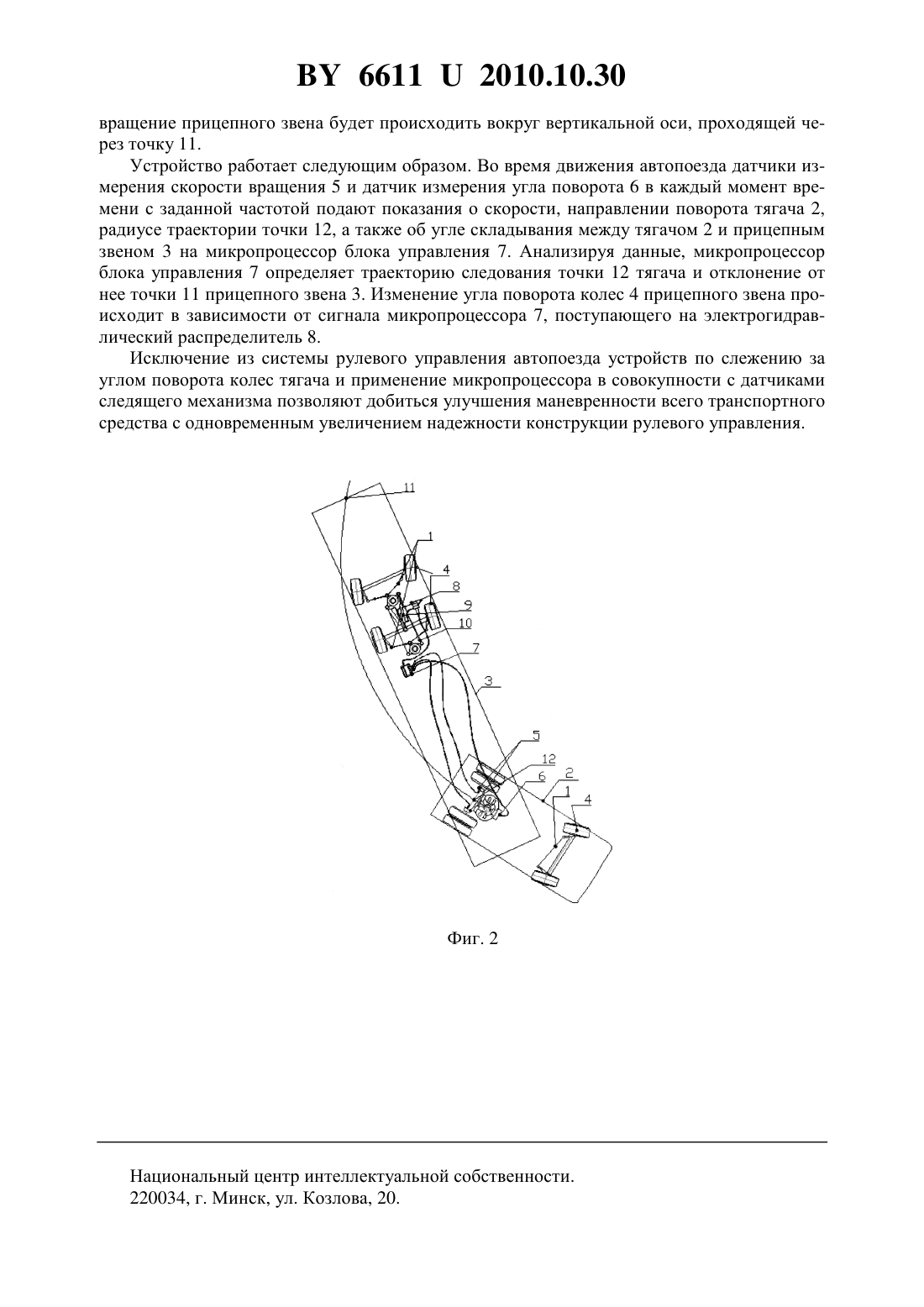
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ АВТОПОЕЗДА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Высоцкий Михаил Степанович Харитончик Сергей Васильевич Кочетов Сергей Иванович Гайсенок Иван Валентинович Суша Сергей Аркадьевич Куприенко Никита Олегович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Система рулевого управления автопоезда, содержащая рулевые трапеции тягача и прицепного звена, связанные с поворотными колесами, следящий механизм, исполнительный механизм и силовой гидроцилиндр, механически связанный посредством тяг с рулевой трапецией прицепного звена, отличающаяся тем, что следящий механизм включает индуктивные датчики измерения скорости вращения, установленные на полуосях ведущего моста тягача, и датчик измерения угла поворота прицепного звена относительно тягача, закрепленный на нем, при этом датчики следящего механизма связаны с блоком управления, который выполнен в виде микропроцессора и закреплен на прицепном звене и связан с исполнительным механизмом, представляющим собой электрогидравлический распределитель, закрепленный на прицепном звене и гидравлически связанный с силовыми гидроцилиндрами.(56) 1. Патент РФ на изобретение 2282551, МПК 62 13/02,62 7/16, 2006. 2. Патент РФ на изобретение 2312034, МПК 62 13/04, 2007. Полезная модель относится к транспортному машиностроению, в частности к системам рулевого управления модульных многозвенных автопоездов, и может быть использована для повышения маневренности автопоезда за счет следования крайней задней точки полуприцепа, лежащей в его продольной вертикальной плоскости симметрии, по траектории точки, лежащей на ведущем мосту тягача на одинаковом удалении от правого и левого колес, в проекции на плоскость дороги. Давно известны проблемы управления данным видом грузового транспорта, связанные с требованиями, устанавливаемыми законодательствами разных стран по управляемости и устойчивости. Применение нескольких прицепных звеньев в составе автопоезда приводит к тому, что такие транспортные средства не вписываются в коридор с геометрическими параметрами, установленными директивой 97/27/ЕС. Дорога небольшой ширины в городе и его окрестностях усложняет проезд даже седельному тягачу с одним прицепным звеном, не говоря об использовании транспортного средства многозвенной конструкции. Износ шин о поверхность дороги при неуправляемых колесах прицепного звена,кроме непосредственного износа, повышает расход топлива. Известно рулевое устройство, применяемое для управления автопоездами, имеющими тягач и один или несколько прицепов 1. Известное устройство имеет средство для автоматического позиционирования стопорного средства относительно основного шасси при повороте колесной части так, что максимальный угол поворота изменяется в соответствии с позиционированием стопорного средства, и управляющее средство, реагирующее на относительный поворот дополнительного шасси и основного шасси, для управления по меньшей мере двумя парами колес относительно дополнительного шасси для выравнивания в продольном направлении дополнительного шасси относительно основного шасси,при этом каждая пара управляемых колес установлена на неподвижном мостовом узле,шарнирно соединенном с дополнительным шасси, и выполнена с возможностью управления посредством поворота мостового узла вокруг, по существу, вертикальной оси на дополнительном шасси, при этом оси вращения каждой пары управляемых колес сходятся друг к другу на стороне дополнительного шасси при повороте прицепа. Однако это устройство имеет сложную конструкцию рулевого управления, а именно механизма, определяющего угол поворота дополнительного шасси относительно основного. Наличие рулевого управления указанной конструкции приводит к низкой маневренности автопоезда. Наиболее близкой к заявляемому по технической сущности и достигаемому результату является система рулевого управления большегрузного седельного автопоезда 2. Устройство содержит рулевые трапеции тягача и прицепного звена, связанные с поворотными колесами, исполнительный гидроцилиндр, шток которого кинематически связан через золотниковый гидрораспределитель с силовым гидроцилиндром, механически связанным посредством тяг с рулевой трапецией прицепного звена, дополнительный гидроцилиндр, закрепленный на тягаче, соединенный штоком с рычагом, связанным с рулевой трапецией, причем дополнительный гидроцилиндр гидравлически связан с полостью исполнительного гидроцилиндра. В магистраль, соединяющую дополнительный гидроцилиндр с исполнительным гидроцилиндром, дополнительно включен резервуар подпитки гидросистемы с кранами перекрытия. Особенностью данной системы является зависимость угла поворота управляемых колес прицепного звена в функции от угла поворота управляемых колес тягача. 2 66112010.10.30 Недостаток прототипа - недостаточная маневренность автопоезда, т.к. кинематические, механические и гидравлические связи рулевого управления обусловливают жесткую, постоянную во времени зависимость углов поворота колес прицепного звена от колес тягача. В связи с этим происходит немедленное включение действия системы при повороте рулевого колеса, в результате чего происходит значительный вынос заднего свеса прицепного звена, результатом которого может стать выезд автопоезда с дороги. Дополнительный гидроцилиндр и резервуар подпитки гидросистемы с кранами перекрытия, устанавливаемые на тягач, по известному устройству снижают надежность конструкции рулевого управления и увеличивают частоту прохождения технического обслуживания. Задачей полезной модели является создание конструкции рулевого управления, позволяющей повысить маневренность автопоезда за счет возможности изменения угла поворота управляемых колес прицепного звена в зависимости от алгоритма, заложенного в блок управления. Поставленная задача достигается за счет того, что в системе рулевого управления автопоезда, содержащей рулевые трапеции тягача и прицепного звена, связанные с поворотными колесами, следящий механизм, исполнительный механизм и силовой гидроцилиндр,механически связанный посредством тяг с рулевой трапецией прицепного звена, новым является то, что следящий механизм включает индуктивные датчики измерения скорости вращения, установленные на полуосях ведущего моста тягача, и датчик измерения угла поворота прицепного звена относительно тягача, закрепленный на прицепном звене, при этом датчики следящего механизма связаны с блоком управления, который выполнен в виде микропроцессора и закреплен на прицепном звене и связан с исполнительным механизмом, представляющим собой электрогидравлический распределитель, закрепленный на прицепном звене и гидравлически связанный с силовым гидроцилиндром. Новизна полезной модели заключается в том, что каждое последующее звено многозвенного автопоезда следует по траектории, задаваемой блоком управления, а также прямо не зависит от изменения угла поворота управляемых колес тягача. Следствием этого является движение автопоезда при переставке или развороте без выноса заднего свеса прицепного звена на полосу движения, противоположную направлению поворота. Полезная модель иллюстрируется чертежами, на которых изображено на фиг. 1 - общий вид автопоезда с заявляемым устройством, вид сверху, на фиг. 2 - автопоезд с заявляемым устройством в момент поворота. Заявляемая система рулевого управления автопоезда содержит рулевые трапеции 1 тягача 2 и прицепного звена 3, связанные с поворотными колесами 4. Следящий механизм заявляемой конструкции включает два индуктивных датчика измерения скорости вращения 5, установленные на полуосях (на фигуре не показаны) ведущего моста тягача 2, и датчик измерения угла поворота 6 прицепного звена 3 относительно тягача 2, закрепленный на нем. Датчики 5 и 6 следящего механизма связаны с блоком управления, который выполнен в виде микропроцессора 7, закрепленным на прицепном звене 3 и связанным с исполнительным механизмом и выполненным в виде электрогидравлического распределителя 8, который гидравлически связан с силовыми гидроцилиндрами 9 и закреплен на прицепном звене 3, причем они механически связаны посредством тяг 10 с рулевой трапецией 1 прицепного звена 3. На фиг. 2 изображен момент установившегося поворота автопоезда с заявляемым устройством. Крайняя задняя точка 11 прицепного звена 3, лежащая в его продольной вертикальной плоскости симметрии, описывает траекторию точки 12, лежащей на ведущем мосту тягача 2 на одинаковом удалении от правого и левого колес, в проекции на плоскость дороги. Точка 11 выбрана именно так, потому что при повороте автопоезда не будет наблюдаться вынос заднего свеса на соседнюю полосу движения, т.к. относительное 66112010.10.30 вращение прицепного звена будет происходить вокруг вертикальной оси, проходящей через точку 11. Устройство работает следующим образом. Во время движения автопоезда датчики измерения скорости вращения 5 и датчик измерения угла поворота 6 в каждый момент времени с заданной частотой подают показания о скорости, направлении поворота тягача 2,радиусе траектории точки 12, а также об угле складывания между тягачом 2 и прицепным звеном 3 на микропроцессор блока управления 7. Анализируя данные, микропроцессор блока управления 7 определяет траекторию следования точки 12 тягача и отклонение от нее точки 11 прицепного звена 3. Изменение угла поворота колес 4 прицепного звена происходит в зависимости от сигнала микропроцессора 7, поступающего на электрогидравлический распределитель 8. Исключение из системы рулевого управления автопоезда устройств по слежению за углом поворота колес тягача и применение микропроцессора в совокупности с датчиками следящего механизма позволяют добиться улучшения маневренности всего транспортного средства с одновременным увеличением надежности конструкции рулевого управления. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B61D 13/00
Метки: система, автопоезда, рулевого, управления
Код ссылки
<a href="https://by.patents.su/4-u6611-sistema-rulevogo-upravleniya-avtopoezda.html" rel="bookmark" title="База патентов Беларуси">Система рулевого управления автопоезда</a>
Система рулевого управления для гусеничного транспортного средства
Номер патента: 6629
Опубликовано: 30.12.2004
Авторы: СТРАТКЕР, Джон Георг
МПК: B62D 11/10
Метки: управления, средства, система, гусеничного, рулевого, транспортного
Текст:
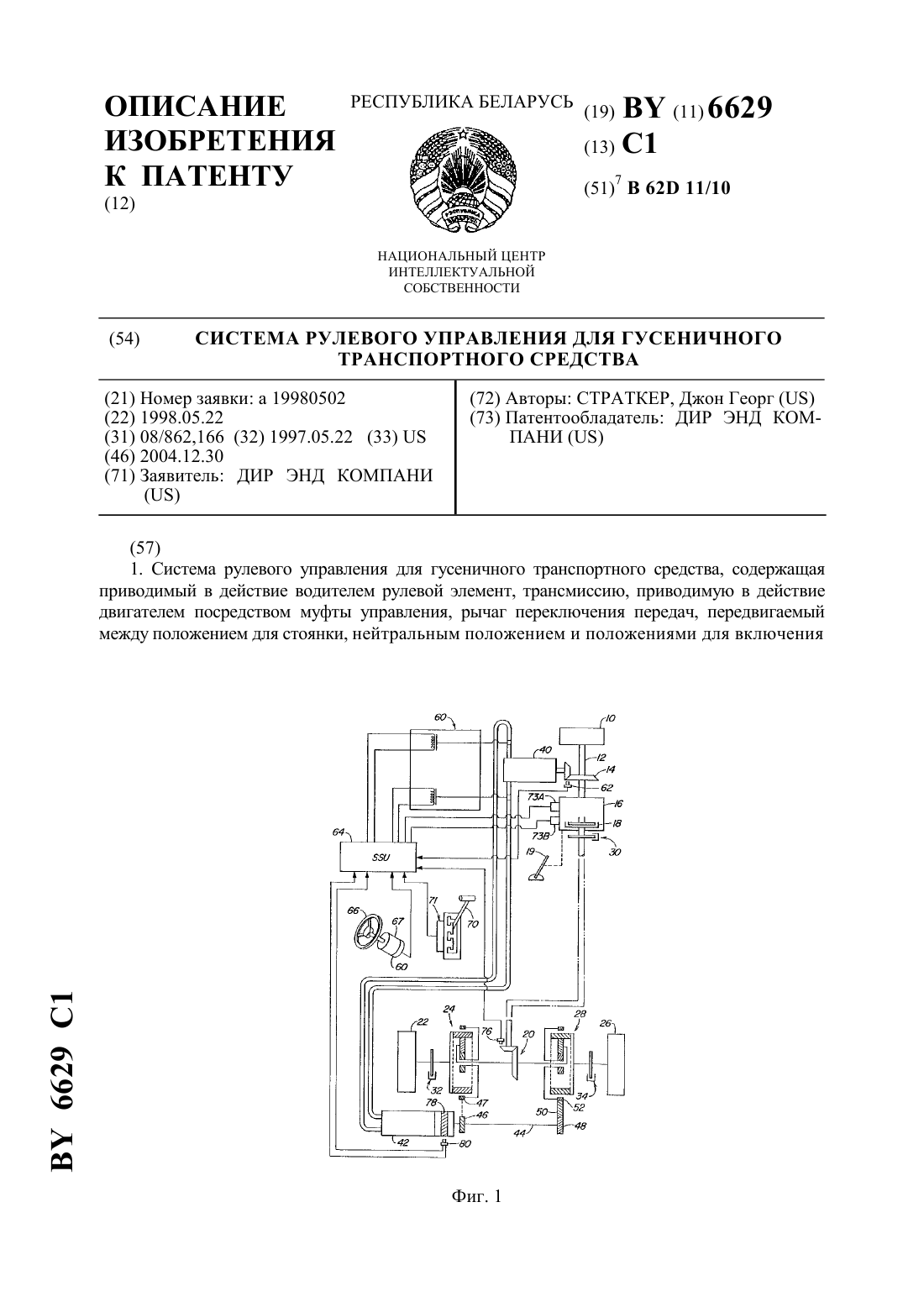
...возвращать темп поворота транспортного средства к темпу, имеющему место при работе средства нормального режима при возвращении рулевого элемента в его центральное положение. В одном из предпочтительных вариантов система дополнительно содержит датчик скорости вращения двигателя для считывания скорости вращения двигателя, а средство временного режима содержит средство, выполненное с возможностью приведения в действие при неподвижном транспортном...
Гидравлический усилитель рулевого управления мобильной машины

Номер патента: U 5207
Опубликовано: 30.04.2009
Авторы: Тарасик Владимир Петрович, Мрочек Татьяна Владимировна
МПК: B62D 5/06
Метки: мобильной, управления, машины, гидравлический, усилитель, рулевого
Текст:
...клапаном на очень маленькую величину (0,010,02 МПа). В результате перепускной клапан может не отключить полость пружины клапана разности давлений от слива, и гидроусилитель не включится. Таким образом, низкая надежность данной конструкции гидроусилителя обусловлена тем, что полезные сигналы в этом техническом решении сопоставимы с уровнем шумов (помех - таких, как силы трения золотника перепускного клапана, допуски на изготовление...
Гидравлический усилитель рулевого управления мобильной машины

Номер патента: U 5082
Опубликовано: 28.02.2009
Авторы: Мрочек Татьяна Владимировна, Тарасик Владимир Петрович
МПК: B62D 5/06
Метки: мобильной, гидравлический, усилитель, рулевого, машины, управления
Текст:
...жидкость уходит на слив главным образом через клапан разности давлений. При необходимости совершения поворота выход регулятора расхода с помощью распределителя будет подключен к одной из полостей цилиндра. Это приведет к росту давления управления перепускным клапаном на очень маленькую величину (0,010,02 МПа). В результате перепускной клапан может не отключить полость пружины клапана разности давлений от слива, и гидроусилитель не...
Устройство рулевого управления транспортного средства
Номер патента: 12299
Опубликовано: 30.08.2009
Авторы: Стасилевич Андрей Григорьевич, Дубовик Дмитрий Александрович, Горин Геннадий Степанович, Усс Иван Никодимович, Амельченко Петр Адамович, Высоцкий Михаил Степанович, Ермаленок Валерий Генрихович
МПК: B62D 05/07, B60K 17/16
Метки: средства, управления, рулевого, устройство, транспортного
Текст:
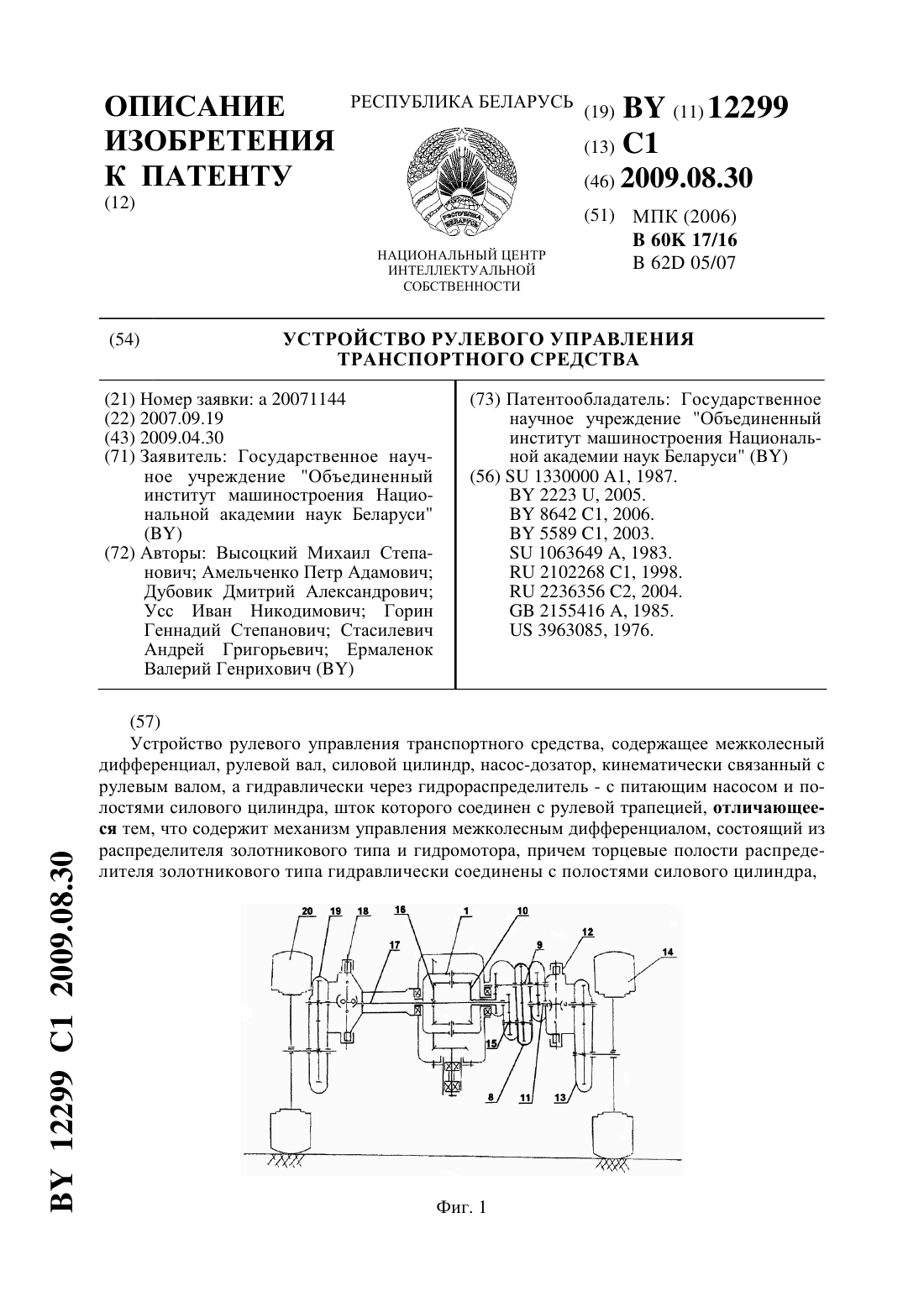
...увеличения угла поворота управляемых колес. Задачей настоящего изобретения является улучшение прямолинейности при движении транспортного средства по косогору или на пахоте и при действии отклоняющего момента, обусловленного смещением тяговой нагрузки относительно продольной плоскости симметрии или вызванного рельефом местности, а также обеспечение хорошей поворачиваемости при криволинейном движении с тяговой нагрузкой путем регулирования...
Гидроусилитель рулевого управления транспортного средства
Номер патента: 655
Опубликовано: 30.06.1995
Авторы: Пуховой А. А., Червяк Г. П., Добринец В. К.
МПК: B62D 5/22
Метки: рулевого, управления, гидроусилитель, средства, транспортного
Текст:
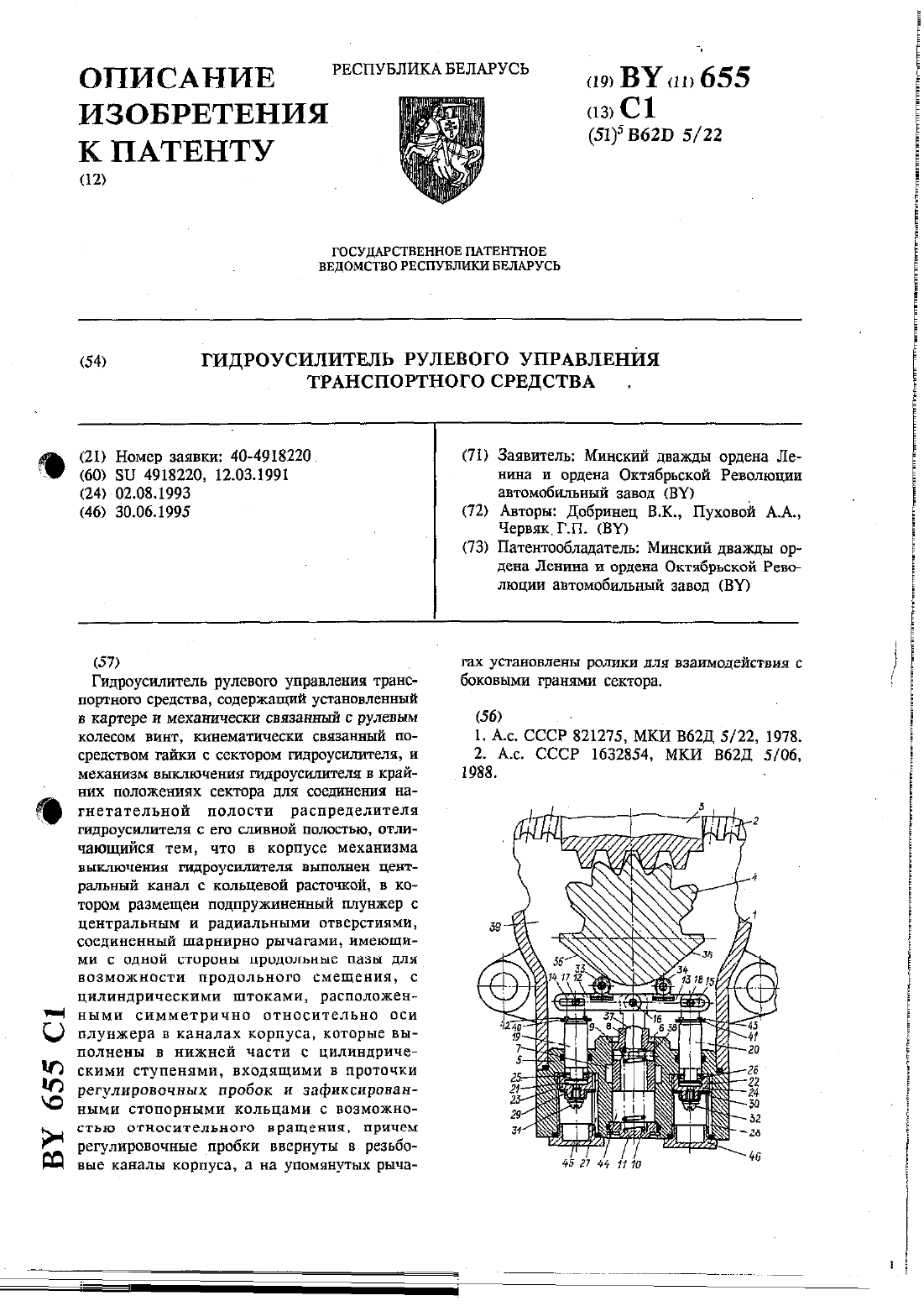
...каналом 6 и кольцевой расточкой 7, плунжер 8, поджимаемый к стопориому кольцу 9 пружиной 10, контактирующей с пробкой 11. Плунжер 8 соединен рычагами 12 и 13, имеющими продольные пазы 14 и 15 для возможности продольного смещения, и пальцами 16,17 и 18 с цилиндрическими штоками 19 и 20,расположенными симметрично относительно оси плунжера 8 в каналах корпуса 5. В нижней части цилиндрические Штоки 19 и 20 имеют ступени 21 и 22, входящие в...
Предыдущий патент: Тепловой аккумулятор фазового перехода
Следующий патент: Топливная рабочая колоша
Случайный патент: Пульсирующая тепловая труба