Способ Фурунжиева управления движением транспортного средства
Текст
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ФУРУНЖИЕВА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Фурунжиев Решат Ибраимович(72) Автор Фурунжиев Решат Ибраимович(73) Патентообладатель Фурунжиев Решат Ибраимович(57) 1. Способ управления движением транспортного средства, заключающийся в измерении фактической величины по меньшей мере одной выходной переменной и/или ее производной по меньшей мере одной управляемой системы транспортного средства, последующем преобразовании полученных сигналов и формировании управляющего сигнала, на основе которого производят автоматическое управление по меньшей мере одним исполнительным механизмом для регулирования величины соответствующей выходной переменной соответствующей управляемой системы транспортного средства, отличающийся тем, что преобразование осуществляют на основе фактической величины выход ной переменнойи ее производной, полученных посредством измерения, интегрирования или дифференцирования, а также величины заданной переменнойпутем формирования сигнала, соответствующего желаемому изменению величины регулируемой выходной переменной согласно уравнению(,,),1,где(,,) - заданные операторы, - количество управляемых систем транспортного средства,а формирование управляющего сигналаосуществляют в соответствии с формулой 0(,,),где 0 ,- константы,- выходная переменная соответствующего исполнительного механизма. 2. Способ по п. 1, отличающийся тем, что 00 . 3. Способ по п. 1, отличающийся тем, что для обеспечения эффективного торможения/разгона при регламентированном скольжении/буксовании колес в качестве измеряемой величины используют скорость изменения фактической тормозной/тяговой силы/момента. 4. Способ по п. 1, отличающийся тем, что для обеспечения курсовой устойчивости движения в качестве измеряемой величины используют разность скоростей изменения суммарных тормозных/тяговых сил/моментов с левого и правого бортов транспортного средства. 5182 1 5. Способ по п. 1, отличающийся тем, что для обеспечения активной адаптивной виброзащиты амортизируемых масс в качестве измеряемой величины используют скорость изменения фактических сил, передаваемых на амортизируемую массу. 6. Способ по п. 1, отличающийся тем, что для обеспечения адаптивного следящего действия рулевого механизма с усилителем и/или оптимальных режимов функционирования трансмиссии и двигателя в качестве измеряемой величины используют производную выходной переменной. 7. Способ по п. 1, отличающийся тем, что в качестве измеряемой величины используют угол рысканья и/или скорость угла рысканья, угол крена/тангажа корпуса и/или скорость угла крена/тангажа. 8. Способ по п. 1, отличающийся тем, что в качестве управляемой системы транспортного средства используют антиблокировочную и/или противобуксовочную систему,при этом в случае, если скольжение/буксование колес транспортного средства соответствует регламентированным нормам, производят торможение/разгон без коррекции действий водителя. 9. Способ по п. 1, отличающийся тем, что в качестве измеряемой величины используют производную кривой коэффициент сцепления - коэффициент скольжения/буксования колес для обеспечения работы колеса в зоне устойчивости с некоторым опережением экстремума.(56)2125517 1, 1999.5353225 , 1994.5444626 , 1995. Способ управления движением транспортных средств относится к области машиностроения и может быть использован в системах управления движением летательных аппаратов, колесных тракторов и гусеничных машин, автомобилей и других мобильных машин. Изобретение может быть использовано при проектировании интегрированных систем управления свойствами движения мобильных машин, а также создании отдельных подсистем управления антиблокировочной, противобуксовочной, активной виброзащиты и др. Известна противоблокировочная тормозная система транспортных средств, описанная в патенте 1, отличающаяся тем, что датчики динамического состояния колес выполнены в виде измерительных устройств, регистрирующих фактические тормозные/тяговые моменты на колесах транспортного средства. Эта система содержит датчики динамического состояния колес, контроллер, встроенные в контуры регуляторы давления, сообщенные с исполнительными механизмами тормозов, источник текучей среды под давлением, подключенный к тормозным камерам колесных тормозов, исполнительный механизм подачи топлива, блок управления двигателем. В патенте не рассмотрены критерии функционирования системы и алгоритмы управления. Наиболее близким к предлагаемому является способ управления антиблокировочной системой торможения транспортного средства, описанный в патенте 2. Этот способ,принятый в качестве прототипа, заключается в том, что измеряют, обрабатывают и анализируют сигнал, пропорциональный фактически реализуемому колесом тормозному моменту, при этом начало операции автоматического выключения/включения осуществляют при обнаружении спада тормозного момента, повторяют эту операцию на протяжении всего времени спада тормозного момента, а завершают операцию выключения/включения тормозного привода при возрастании тормозного момента. Продолжительность и количество операций выключения/включения в интервале времени от спада до возрастания тор 2 5182 1 мозного момента определяется в зависимости от свойств антиблокировочной системы и тормозных механизмов. Этот способ не требует измерений угловых скоростей колес и курсовой скорости транспортного средства. В связи с не стационарностью управляемого процесса в упомянутом патенте для идентификации фактического состояния системы дорога-колесо производится выключение/включение тормозного привода. При этом не исключаются резкие колебания продольных ускорений транспортного средства в случае экстренного торможения. Задачей настоящего изобретения является создание способа управления движением транспортного средства, заключающегося в измерении фактической величины по меньшей мере одной выходной переменной и/или ее производной по меньшей мере одной управляемой системы транспортного средства, последующем преобразовании полученных сигналов и формировании управляющего сигнала, на основе которого производят автоматическое управление по меньшей мере одним исполнительным механизмом для регулирования величины соответствующей выходной переменной соответствующей управляемой системы транспортного средства, при котором преобразование осуществляют на основе фактической величины выходной переменной и ее производной, полученных посредством измерения, интегрирования или дифференцирования, а также величины заданной переменнойпутем формирования сигнала,соответствующего желаемому изменению величины регулируемой выходной переменной,согласно уравнению(,,),1 ,где(,,)заданные операторы- количество управляемых систем транспортного средства,а формирование управляющего сигнала осуществляют в соответствии с формулой 0 ,константывыходная переменная соответствующего исполнительного где механизма. В заявленном способе 0 может быть равным 0. Для обеспечения эффективного торможения/разгона при регламентированном скольжении/буксовании колес в качестве измеряемой величины используют скорость изменения фактической тормозной/тяговой силы/момента. Для обеспечения курсовой устойчивости движения в качестве измеряемой величины используют разность скоростей изменения суммарных тормозных/тяговых сил/моментов с левого и правого бортов транспортного средства. Для обеспечения активной адаптивной виброзащиты амортизируемых масс в качестве измеряемой величины используют скорость изменения фактических сил, передаваемых на амортизируемую массу. Для обеспечения адаптивного следящего действия рулевого механизма с усилением и/или оптимальных режимов функционирования трансмиссии и двигателя в качестве из меряемой величины используют производнуювыходной переменной. В качестве измеряемой величины могу быть использованы угол рысканья и/или скорость угла рысканья, угол крена/тангажа корпуса и/или скорость угла крена/тангажа. В качестве управляемой системы транспортного средства может быть использована антиблокировочная и/или противобуксовочная система, при этом в случае, если скольжение/буксование колес транспортного средства соответствует регламентированным нормам, производят торможение/разгон без коррекции действий водителя. 5182 1 В качестве измеряемой величины может быть использована производная кривой коэффициент сцепления-коэффициент скольжения/буксования колес для обеспечения работы колеса в зоне устойчивости с некоторым опережением экстремума. Упомянутые особенности способа обеспечивают устойчивость движения мобильной машины в любых режимах движения, в том числе при экстренном торможении и интенсивном разгоне, без резких колебаний продольных ускорений корпуса. Кроме того, предусмотрен механизм упреждающего контроля фактических тормозных/тяговых сил/моментов, позволяющий варьировать относительное скольжение/буксование колес путем задания соответствующих параметров алгоритма. Для удобства изложения в предлагаемой интегрированной системе управления движением в соответствии с выполняемыми функциями выделяются следующие основные компоненты (подсистемы) антиблокировочная система (АБС), противобуксовочная система (ПБС), система контроля движения по задаваемому курсу (СКК), система предотвращения опрокидывания (СПО), система активной виброзащиты и стабилизации (СВС),система управления рулевым механизмом с усилителем (СУР), система управления трансмиссией (СУТ), система управления двигателем (СУД) и система информационнодиагностическая (СИД). Рассмотренное разделение функций интегрированной системы управления носит методический характер, так как подсистемы взаимосвязаны и совместно используют датчики информации и исполнительные механизмы. В систему могут быть включены и другие подсистемы. Благодаря унификации критериев качества управления, формулировок задач и алгоритмов адаптивного управления для всех подсистем интегрированной системы, согласно настоящему изобретению, создан универсальный класс системы управления, экземплярами (подсистемами) которой являются АБС, ПБС и другие, в которой на основании командной и фактических величин выходной переменной и ее производной формируют желаемые (заданные, эталонные) свойства движения выходной переменной и реализующий эти свойства управляющий сигнал. Поскольку ситуация меняется быстро, используются унифицированные алгоритмы адаптивного управления, сочетающие точность и быстродействие без перерегулирования. Формируемый сигнал управления используется в качестве входного сигнала конечного управляющего элемента, генерирующего силовое воздействие на систему. Сигнал управления корректируется в последовательные моменты времени 1 ,,1 ,(интервал квантования времени) путем присваивания сигналу управления нулевого значения (отключение системы управления), если свойства движения системы являются допустимыми. Для решения поставленной задачи в системе адаптивного управления используются средства для измерений и фильтрации сигнала, соответствующего действиям водителя и/или ее производной и преобразования их в соответствующие сигналы средства для измерений и фильтрации наблюдаемых выходной переменной и/или ее производной и преобразования их в соответствующие сигналы средства измерений и фильтрации выходной переменной конечного управляющего элемента системы (исполнительного механизма) и/или ее производной и преобразования их в соответствующие сигналы средства для идентификации/прогнозирования критических (не допустимых) состояний системы средства для формирования уравнений эталонного движения системы на основе командной и фактических величин выходной переменной и ее производной и сигнала управления. Пустьмножество свойств, характеризующих фактическое динамическое состояние системы, амножество допустимых свойств. В процессе функционирования сис 4 5182 1 темы в последовательные моменты времени 1 ,,1 , производится идентификация состояния системы, т.е. проверка условия. Если это условие выполняется, сигналу управления на рассматриваемом интервале квантования присваивается значение, равное нулю, что соответствует отключению системы управления, а в противном случае - сигнал управления на этом интервале времени принимает значение, определяемое алгоритмом управления, что соответствует включенному состоянию системы. Таким образом, интегрированная система корректирует устанавливаемый водителем режим движения только в случае, когда допустимые свойства движения не удовлетворяются, т.е. если. Предполагается, что наблюдаемыми являются, как правило, скорости либо ускорения выходных переменных. В этом случае не требуется проведения тарировок измерительных устройств и, кроме того, при прочих одинаковых условиях обеспечивается более высокая точность, так как сигналы, соответствующие не наблюдаемым переменным, необходимые для вычисления сигнала управления, определяются путем интегрирования сигналов, соответствующих наблюдаемым переменным, вместо дифференцирования. В дальнейшем под системой понимается универсальный класс, экземплярами которого могут быть как интегрированная система управления движением в целом, так и отдельные подсистемы, например, АБС, ПБС и др. Принципы функционирования, критерии качества управления, формулировки задач и базовые алгоритмы адаптивного управления,согласно предлагаемому способу, являются общими для всех экземпляров этого класса. Это позволяет повысить эффективность, упростить и снизить стоимость встроенной системы адаптивного управления. Сущность изобретения достигается тем, что в предлагаемом способе путем управления скольжением/буксованием колес обеспечивается устойчивость и управляемость машины. Кроме того, достигается адаптивная виброзащита амортизированной массы (корпуса, кабины, сиденья водителя), адаптивное следящее действие рулевого механизма с усилителем, адаптивное управление другими подсистемами. Алгоритм работы интегрированной системы в реальном времени определяется программой, зашитой в постоянное запоминающее устройство (ППЗУ) контроллера путем кросс-компиляции после завершения интерактивного диалога по инсталляции системы под конкретные пожелания заказчика системы. В интерактивном режиме, прежде всего,задается конфигурация интегрированной системы и параметры, определяющие нечеткие свойства критерия качества управления, объекта и приводов. При инсталляции в систему могут быть включены один компонент, например АБС,два - АБС и ПБС, либо большее число компонент. Система является открытой и при необходимости в нее могут включаться другие известные и новые компоненты, функционирующие на тех же критериях качества управления, формулировках задач и алгоритмах адаптивного управления. В процессе инсталляции системы для каждого включаемого компонента задается принцип функционирования либо на основе наблюдений величин силового типа, либо величин кинематического типа. Далее задается порядок производных наблюдаемых (измеряемых) переменных системы в зависимости от типа используемых в системе измерительных устройств. При этом если наблюдается непосредственно выходная переменная,задается нулевой порядок, если наблюдается первая производная выходной переменной первый порядок, если наблюдается вторая производная выходной переменной - второй порядок, третья производная выходной переменнойтретий порядок. Заданному порядку соответствует алгоритм идентификации ненаблюдаемых переменных, используемых в алгоритме адаптивного управления. Для выбранного компонента задаются также схема реализации (например,,,(, свойства используемых исполнительных механизмов. Таким образом, желаемые конфигурация, схема реализации,5 5182 1 принцип функционирования, порядок производных наблюдаемых выходных сигналов задаются в режиме дружеского диалога. В результате алгоритм функционирования каждого компонента системы управления адаптируется под конкретные приложения. После завершения диалога производится кросс-компиляция экземпляра приложения в образец системы. На этом процесс инсталляции заканчивается. Рассмотрим некоторые особенности функционирования интегрированной системы управления, функционирующей в соответствии с предлагаемым способом управления. При трогании и разгоне мобильной машины, если буксование/скольжение колес удовлетворяет допустимым условиям движения, система управления не корректирует действий водителя. В противном случае коррекция осуществляется в зависимости от выбранного принципа функционирования. Рассмотрим АБС/ПБС, функционирующие на основе измерений величин кинематического типа. В патенте 4 мгновенные коэффициенты сцепления и производные кривой коэффициент сцепления-скольжение/буксование оцениваются в последовательные моменты времени на основе формируемых системой управления тяговых/тормозных моментов и угловых скоростей колес. Вычисляемые для каждого из колес величины производных сравниваются с командной величиной производной, в качестве которой принимается некоторая достаточно малая положительная величина. Рассогласования между командными и рассчитанными величинами, после соответствующего преобразования, влияют на конечные управляющие элементы (пропорциональные клапаны, например), посредством которых реализуются необходимые тормозные давления в рабочих цилиндрах или количество топлива, подаваемого в единицу времени. Кроме того, для улучшения динамических процессов и устойчивости управляющей цепи коэффициенты усиления системы управления варьируются в соответствии с вычисленными коэффициентами сцепления. Таким образом, управление производится таким образом, чтобы скольжение/буксование находилось в зоне устойчивости кривой коэффициент сцепления-скольжение/буксование, несколько опережая экстремум. Для формирования сигнала управления используется ПИ-регулятор с коэффициентом усиления, пропорциональным вычисленному коэффициенту сцепления. Качество работы, рассмотренной в патенте 4, системы может быть улучшено, если формируются желаемые свойства движения выходной переменной (производной кривой коэффициент сцепления-скольжение/буксование) и осуществляющие эти свойства управления в соответствии с предлагаемым согласно настоящему изобретению способом. Другими словами, и при использовании кинематических величин можно улучшить алгоритм управления. Кроме того, алгоритм будет проще, если используются фактические величины сил/моментов и/или их производных. Для идентификации состояния системы дорога-колесо при этом используются характерные особенности изменения во времени фактических тормозных/тяговых моментов и их скоростей в критических режимах, когда допустимые свойства движения не удовлетворяются. Рассмотрим работу АБС/ПБС, функционирующих на основе измерений силовых величин и/или их производных. Сигналы, пропорциональные фактическим тормозным/тяговым силам/моментам на колесах и/или их производным, что предпочтительнее, поступают в контроллер. Контроллер формирует сигналы управления, в соответствии с которыми функционируют исполнительные механизмы. Если скольжение/буксование колес не является допустимым, система производит коррекцию действий водителя в соответствии с встроенными алгоритмами адаптивного управления. При торможении водитель воздействует на педаль тормоза, с которой жестко связан шарнирный шток главного тормозного цилиндра. Давление текучей среды через трубопроводы передается блоку регуляторов, а затем на исполнительные механизмы тормозов. 6 5182 1 Если скольжение колес является допустимым, происходит рабочий режим торможения. В противном случае, как правило, при экстренном торможении, система управления корректирует устанавливаемый водителем режим торможения. При этом контроллер, обрабатывая сигналы от измерительных устройств, формирует сигналы управления, поступающие на блок регуляторов, а затем на исполнительные механизмы тормозов. Функционирование ПБС определяется выбранной схемой. Сигнал управления подается на блок регуляторов, который посредством исполнительных механизмов регулирует тяговые моменты на ведущих колесах, обеспечивая допустимое буксование ведущих колес, повышая тем самым устойчивость движения. Если буксование колес не удовлетворяет допустимому множеству свойств движения, производится коррекция действий водителя. Поскольку ситуация меняется быстро, необходимы эффективные алгоритмы адаптивного управления, сочетающие высокую точность и быстродействие без перерегулирования. Используемые в предлагаемом способе алгоритмы адаптивного управления удовлетворяют этим требованиям. Функционирование системы определяется выбранным при инсталляции системы режимом. Использование для повышения эффективности торможения в АБС схемыи другие факторы могут приводить к рассогласованию суммарных сил/моментов, действующих с левого и правого бортов мобильной машины, и, как следствие, к потере устойчивости. В предлагаемом способе траекторная и курсовая устойчивость рассматриваются по Ляпунову. Если дополнительная боковая составляющая вектора поступательной скорости и скорость угла рысканья, возникшие вследствие какого-либо возмущения, пристремятся к нулю, а рассогласование между фактическим углом поворота продольной оси мобильной машины и заданным направлением движения стремится к командной величине, то движение устойчивое. Отклонение мобильной машины от заданной траектории, а ее продольной оси от заданного направления за счет упругости и проскальзывания отдельных элементов шин допустимо. Но если транспортное средство скользит, перемещаясь в боковом направлении,то это является предельным случаем потери устойчивости, называемой заносом. Потеря устойчивости транспортного средства относительно осей крена и тангажа ведет к опрокидыванию транспортного средства относительно этих осей. Если угол крена и скорость угла крена, возникшие вследствие какого-либо возмущения, пристремятся к нулю, то движение транспортного средства устойчиво по опрокидыванию. В системе, предотвращающей отклонение от задаваемого водителем курса, формируются желаемые свойства движения для сигналов рассогласования и осуществляющие эти свойства управления. Так, например, в режиме торможения, если суммарные фактические тормозные силы/моменты с левого борта превышают суммарные фактические силы/моменты с правого борта, вырабатываются управляющие сигналы, уменьшающие давления рабочего тела в исполнительных механизмах с левого борта, и наоборот. Таким образом, независимо от природы сил, приводящих к рассогласованию, система с высокой точностью и быстродействием без перерегулирования минимизирует рассогласование путем воздействия на соответствующие исполнительные механизмы, обеспечивая устойчивость курсового движения в режиме торможения. Аналогично в тяговом режиме, если на основе рассогласования между суммарными фактическими тяговыми силами/моментами с левого и правого бортов мобильной машины формируются соответствующие управляющие сигналы, воздействующие в зависимости от выбранной при инсталляции системы схемы или на актюатор дроссельной заслонки, или на модуляторы тормозных сил, или на механизм блокировки дифференциала (если таковой предусматривается), в соответствии с выбранным алгоритмом адаптивного управления. Последовательность включения каждого из этих исполнительных механизмов задается при инсталляции системы. Таким образом, курсовая устойчивость 7 5182 1 мобильной машины в тяговом режиме обеспечивается совместным использованием предоставленных в распоряжение системы при инсталляции исполнительных механизмов. Система управления рулевым управлением с усилителем функционирует как адаптивная следящая система, отрабатывающая задаваемый водителем переменный во времени командный сигнал, соответствующий углу поворота рулевого колеса, с учетом ряда факторов (курсовой скорости движения мобильной машины, поперечного ускорения корпуса,нагрузки на переднюю ось и др.), в том числе изменяющихся эксплуатационных условий. Сигналы, пропорциональные командному угловому перемещению рулевого колеса,преобразованное, например, в линейное перемещение, и фактическая выходная переменная системы и/или ее производная используются для формирования желаемых свойств движения системы. Формируемые в соответствии с этими свойствами движения сигналы управления минимизируют в каждый момент времени рассогласование между командной и фактической величинами с учетом занесенных в память обеспечивающих устойчивость движения эталонных величин сочетаний углов поворота и скоростей движения мобильной машины. Если система не в состоянии обеспечить возложенные на нее функции, формируется команда на уменьшение курсовой скорости движения мобильной машины (управление двигателем). Как видно, и здесь производится совместное использование исполнительных механизмов. Аналогично осуществляется управление четырьмя колесами с учетом скорости движения, обеспечивающее плавные повороты на малой скорости и устойчивость на большой. Нетрудно видеть, что задача управления рулевым механизмом с усилителем редуцируется к задаче адаптивного слежения. В системе активной виброзащиты при движении мобильной машины по каждой опоре наблюдаются сигналы, соответствующие связкам фактических упруго-диссипативных сил, передающихся на амортизируемую/стабилизируемую массу (корпус, кабина, кресло оператора) и/или их производные, а также сигналы, пропорциональные выходным переменным исполнительных механизмов (перемещениям плунжеров электрогидравлических исполнительных механизмов) и/или их производным. На основе наблюдений сигналов,пропорциональных скоростям изменения фактически воздействующих на амортизированную/стабилизированную массу по каждой опоре сил и/или их производных, формируются эталонные свойства движения и реализующие их управляющие сигналы. В зависимости от выбранной при инсталляции схемы управление может осуществляться по осям либо по каждой опоре. В последнем случае желаемые свойства движения формулируются для приходящейся на опору виртуальной массы, изменяющейся при торможении/разгоне, и в соответствии с этими свойствами вычисляются сигналы управления для каждой опоры. Исполнительные механизмы системы активной виброзащиты позволяют установить также желаемое статическое положение амортизируемой массы (постоянство высоты шасси, кабины, кресла водителя) независимо от изменения нагрузки. Статическим регулированием поддерживается постоянство расстояния между амортизированной и не амортизированной массами для каждой оси или каждого колеса при изменении амортизированной массы. При этом регулирующее устройство, действуя с достаточным запаздыванием,исключает реакцию на колебания при функционировании системы в реальном времени. В системе управления устойчивостью по опрокидыванию при движении мобильной машины анализируется режим движения амортизированной массы и, если он не соответствует допустимому по опрокидыванию, система корректирует его, предотвращая опрокидывание. В противном случае, никаких действий не производится. При этом могут быть реализованы два подхода без использования устройств измерения угла крена (скорости угла крена) и с их использованием. Каждый из них выбирается при инсталляции системы. Рассмотрим работу системы предотвращающей опрокидывание. Наблюдаемыми являются сигналы, пропорциональные связкам упруго-диссипативных сил, действующих 8 5182 1 по каждой опоре с левого и правого бортов мобильной машины и/или их производным. При этом используются те же измерительные и исполнительные устройства, что и в системе активной виброзащиты. На основе суммарных сил, действующих с левого и правого бортов мобильной машины, а также угла и ее производной, устанавливаются свойства,которые могут повлечь опрокидывание. Одновременно формируются желаемые свойства движения и управления, предотвращающие опрокидывание. Стабилизирующий момент может формироваться для каждой оси на основе равенства по модулю управлений для левой и правой опор. Таким образом, задача предотвращения опрокидывания редуцируется к задаче адаптивного управления, состоящей в формировании желаемых свойств движения угла крена амортизированной массы и сигналов управлений их осуществляющих. Управление двигателем может осуществляться ПБС, системой, минимизирующей расход топлива, и др. Управление крутящим моментом/мощностью двигателя реализуется путем управления впрыском топлива, зажиганием, электронной дроссельной заслонкой. Выбор режимов производится при инсталляции системы. В известных алгоритмах важным является точное и быстрое считывание нагрузки двигателя для осуществления правильной коррекции крутящего момента. Измерение нагрузки двигателя может осуществляться, например, путем измерения массового расхода воздуха. Предлагаемый способ является адаптивным по своей сути и позволяет реализовать желаемые свойства движения выбранной выходной переменной при меняющейся нагрузке. Интегрированное управление двигателем с учетом различных факторов, влияющих на его выходную мощность, осуществляется с помощью одного исполнительного устройства- актюатора дроссельной заслонки. При этом в дополнение к педали акселератора используется технология электронного управления по сигналам от контроллера. Таким образом,управление двигателем сводится к управлению актюатором дроссельной заслонки в соответствии с желаемыми свойствами движения выходных сигналов. При изменении подачи топлива происходит изменение момента двигателя в соответствии со скоростными характеристиками двигателя. При электронном управлении впрыском в цилиндры дизельного двигателя оптимального количества топлива в зависимости от оборотов вала двигателя и эксплуатационных условий система обрабатывает сигналы от датчиков положения педали акселератора, оборотов, температуры и давления воздуха наддува, температуры топлива, скорости движения транспортного средства, положения рейки топливного насоса высокого давления (ТНВД) и др. Предельные значения по составу выхлопных газов, механическим и тепловым нагрузкам двигателя, параметры исполнительного привода ТНВД и др. хранятся в памяти контроллера. На основании сигналов, соответствующих фактическим величинам наблюдаемых выходных сигналов и хранящимися в памяти их эталонных значений формируются желаемые свойства движения управляемых сигналов и сигналы управления их реализующие. В бензиновых двигателях осуществляется управление впрыском топлива на установившихся и переходных режимах, зажиганием с предупреждением детонации в отдельных цилиндрах, холостым ходом, а также функцией дублирования неисправного датчика (функция хромания домой). Затем на основании сигналов, соответствующих фактическим величинам и хранящихся в памяти эталонным значениям, формируются желаемые свойства движения и сигналы управления, обеспечивающие эти свойства. Вопросы управления двигателем здесь не рассматриваются углубленно. Вместо этого показана лишь возможность использования предлагаемого подхода для решения и этой не простой задачи. Несмотря на многообразие конструктивных решений реализации трансмиссий, всегда можно выделить выходные переменные и управлять ими в соответствии с обсуждаемым способом управления. Так, при управлении автоматической коробкой перемены передач 9 5182 1 могут наблюдаться сигналы, соответствующие фактическому изменению нагрузки и оборотам двигателя, курсовой скорости мобильной машины, выходной переменной ретардера и др.). На основе командной и фактической величины выходного сигнала и ее производной формируются желаемые свойства движения и соответствующие управляющие сигналы,обеспечивающие эти эталонные свойства. В результате достигается оптимальный контроль выходных моментов и правильный выбор последовательности переключения передач с помощью сервоцилиндров. Пусть, например, силовой агрегат - дизельный двигатель, связанный с гидронасосом переменной производительности, выход которого связан, в свою очередь, с гидромотором,вращающим хвостовик главной передачи трансмиссии. В соответствии с указаниями водителя либо какой-либо из подсистем интегрированной системы требуется обеспечить желаемое изменение угловой скорости хвостовика независимо от изменения нагрузки путем регулирования наклона шайбы насоса переменной производительности. Технология управления в этом случае состоит, например, в следующем. На основании сигналов, соответствующих командной и фактической величинам угловой скорости, а также углового ускорения хвостовика, формируются желаемые свойства изменения угловой скорости и сигналы управления, в соответствии с которым исполнительные механизмы осуществляют эти желаемые свойства. Итак, на основе командной и фактических величин сигналов, соответствующих скоростям мобильной машины формируются желаемые свойства движения для курсовой скорости и сигналы управления, обеспечивающие командную величину скорости при изменяющихся условиях движения мобильной машины, независимо от изменения нагрузки,путем автоматического переключения скоростей коробки перемены передач. Интегрированная система управления движением в соответствии с предлагаемым способом обеспечивает устойчивость и управляемость мобильной машины, а также эффективные разгон/торможение и другие заданные динамические свойства независимо от опыта водителя, наземных, погодных и других условий. Компоненты интегрированной системы могут отличаться способом задания командных величин выходной переменной,используемыми алгоритмами идентификации состояния системы, используемыми устройствами измерения выходных переменных и/или их производных и способом использования исполнительных механизмов. В предлагаемом способе управления для всех подсистем унифицированы критерии качества управления, формулировки задач и алгоритмы адаптивного управления. Это способствует снижению сложности, массы и стоимости, повышению надежности и эффективности встроенной системы управления в целом. При этом представляется возможным создать унифицированные алгоритмические и программные модули для всех или основных систем. Благодаря этому, в программном обеспечении, если они разрабатываются на объектно-ориентированных языках высокого уровня, представляется возможным создавать объекты и классы и перекрывать их свойства в различных модулях. Рассмотрим являющиеся общими для всех компонент интегрированной системы формулировку задач, критерии качества и алгоритмы адаптивного управления. Критерии качества и теоретические основы. Критерии качества управления, являясь краеугольным камнем при построении системы, могут формулироваться по качеству переходного процесса выходной (управляемой) переменной либо как интегральные. Интегральные критерии качества позволяют точность, быстродействие и некоторые другие показатели качества оценивать одним числом. Пусть состояние управляемой системы характеризуется выходной переменной и ее производными (1 ) . Предполагается, что порядок системы равен . Граничные условия заданы в виде 10(2), 0 ,1,2 1. Здесь командная величина выходной переменной. Индексуказывает на принадлежность выходной переменной соответствующему компоненту системы. Условие (1) отражает начальное состояние, а условие (2) - требование асимптотической устойчивости системы в соответствии со вторым законом Ляпунова. Командная величина выходной переменной определяет специфику решаемой задачи для каждой из подсистем интегрированной системы. В задачах типа стабилизации, а в задачах типа слежения . В задаче виброзащиты, являющейся частным случаем задачи стабилизации,0 . Рассмотрим для выходной переменной интегральный критерий вида 1 где (.)заданный функционалрассогласование, определяемое выражениями для задач типа слежения(4) для задач типа стабилизации(5) для задач типа виброзащиты(6) Можно показать, что в общем случае требование минимизации критерия (3) редуцируется к заданию желаемых свойств движения выходной переменной дифференциальным уравнением -го порядка(7) с краевыми условиями (1) и (2). Здесь(.)функция, удовлетворяющая требованию минимума критерия (3). Коэффициенты 0 1 определяются через константы 1 ,входящие в критерий (3). Другими словами, критерий качества управления в интегральной форме (3) можно представить в дифференциальной форме (7) и наоборот. Рассмотрим интегральный квадратичный критерий 1 Используя уравнение Эйлера-Пуассона и требуя, чтобы прифункция стремилась к командной величине, а ее производные стремились к нулю, можно доказать, что оптимизация по критерию минимума интегральной квадратичной ошибки -го порядка вида (8) сводится к требованию, чтобы выходная переменная изменялась в соответствии с решением линейного дифференциального уравнения -го порядка(9) с граничными условиями (1) и (2). При этом коэффициенты 0 1 определяются через константы 1 , входящие в критерий (8). Квадратичному критерию второго порядка 1 5182 1 при граничных условиях (1) и (2) соответствует линейное дифференциальное уравнение эталонного движения второго порядка 22 000.(11) Здесьи 0 константы, определяемые через параметры критерия (10)1 и 2 . Для командной величины( ) вместо уравнения (11) имеем уравнение 2 22 000.(12) Уравнение (12) с граничными условиями (1) и (2) может рассматриваться как исходное уравнение эталонного движения для выходного сигнала . В общем случае, желаемые свойства движения выходных переменных управляемой системы задаются нелинейными дифференциальными уравнениями вида(1) , ,,,),1 ,(13) с граничными условиями (1) и (2). Здесь(.)заданные нелинейные операторы (могут быть идентичными для всех компонент интегрированной системы)командные величины. Задание желаемых свойств движения на нелинейных критериях в форме (13) позволяет построить сигналы управления, сочетающие высокую точность и быстродействие без перерегулирования. Решать уравнение (13) в процессе управления не требуется. Необходимо лишь сформировать правую часть уравнения на основе заданной командной и фактически наблюдаемой величин выходного сигнала и ее производной. Правая часть уравнения эталонного движения и ее производные и/или интеграл правой части используются для формирования сигнала управления. Таким образом, в каждый момент времени формируются и используются в алгоритме управления желаемые ускорения выходной переменной. При этом требование минимизации интегрального квадратичного критерия качества управления и асимптотической устойчивости управляемой системы по Ляпунову обеспечиваются соответствующим заданием уравнений эталонного движения. Общая формулировка задачи. Желаемые свойства движения выходной переменной обеспечиваются, как правило, исполнительными приводами, преобразующими и усиливающими сигналы управления. Поэтому при построении управлений естественным является требование максимального учета свойств используемого исполнительного привода,включающего, как правило, преобразователь-усилитель мощности сигнала управления и исполнительный механизм. Исполнительный привод может иметь отрицательную обратную связь (возможно встроенную) по выходной переменной исполнительного механизма. Так, вводится обратная связь по перемещению плунжера в электрогидравлической системе активной виброзащиты. В связи с изложенным формулировка задач управления и методы их решения должны предусматривать возможность использования обратной связи по сигналу, соответствующему выходной переменной исполнительного механизма. Пусть заданы желаемые свойства движения системы в виде уравнений для сигналов, рассматриваемых в качестве выходных(,,,),1 ,(14) где(.)заданные операторы. Можно принять(.)(.)ограничения на сигналы, соответствующие выходным переменным силовых исполнительных механизмов( , ,),1, , ,(15) где,заданные величины 5182 1 ограничения на управляющие сигналы,1 ,(16) где,заданные величины функции предпочтения для составляющих информационную базу системы нечетко определенных параметров критерия качества управления, объекта и системы управления ,1,,(17) гдефункция принадлежности параметра 01 заданные множества. Требуется построить сигналы управления,1 , обеспечивающие желаемые свойства движения (14) в каждый момент времени при удовлетворении ограничений (15)-(17) и краевых условий (1) и (2). Условие (2) гарантирует асимптотическую устойчивость управляемой системы. Предполагается, что функционалы(.) таковы, что обеспечивается существование и единственность решения сформулированной задачи. В приведенной формулировке задачи устойчивость управляемой системы, заданная условием (2), является неотъемлемым качеством управляемой системы, встроенным в эталонные свойства движения (14), а затем в технологию синтеза управляющих функций. Нечеткие свойства параметров критерия качества управления, объекта и системы управления (17) реализуются после завершения диалога по заданию нечетких свойств для создания экземпляра встроенной системы при инсталляции системы. Приведенная формулировка задачи включает управление системами линейными и нелинейными, по линейным и нелинейным критериям, при четком и нечетком задании критерия качества и информационной базы системы. Таким образом, все задачи, решаемые компонентами интегрированной системы, формулируются в единой форме. При этом требуется лишь конкретизировать выходные переменные системы и соответствующие им командные величины. Математические модели систем в соответствии с приведенной формулировкой задачи для целей управления в реальном времени не требуются. Алгоритмы управления. Пустьмножества свойств, характеризующих фактическое динамическое состояние управляемых систем (1, ,количество управляемых систем, входящих в интегрированную систему), амножество допустимых свойств движения. Эти множества могут уточняться по мере углубления знаний и требований к рассматриваемым системам. Интегрированная система управления должна обеспечивать выполнение условийдля всех 1, ,на всем интервале функционирования системы. Базовые алгоритмы вычисления сигналов управления, соответствующие приведенной формулировке задачи, в общем случае имеют вид Здесь(.) известные функционалы,03 . Вариациейможно получить широкий спектр алгоритмов адаптивного управления 0 константа, характеризующая эффективность отрицательной обратной связи по сигналу, соответствующему выходной переменнойсилового исполнительного механизма,00 . Если функции, характеризующие желаемые свойства движения переменной, заданы аналитически, входящие в формулу (18) производныеи, как правило, также могут быть получены аналити 5182 1 Роль функционала 1 в алгоритме (18) состоит в придании управляемой системе желаемых свойств движения. Функционал 2 отражает фактическое динамическое состояние системы. Функционал 3 отражает состояние исполнительного механизма. Роль функционала Ф 0 состоит в ограничении сигнала управления, когда это требуется. Первый член в выражении (18) компенсирует ослабление сигнала управления при введении априори отрицательной обратной связи по сигналу, соответствующему выходной переменной исполнительного механизма. Если обратная связь не используется 00 . Благодаря слаженной работе в каждый момент времени всех членов команды при использовании нелинейных назначенных свойств движения сочетаются высокое быстродействие и точность без перерегулирования. При этом компенсируются собственные движения системы, отличные от желаемых, а также недостатки используемых исполнительных механизмов. Управление в соответствии с алгоритмом (18) адекватно аппаратным средствам современной цифровой техники и гарантирует асимптотическую устойчивость управляемой системы. При этом не требуется проведения параметрической оптимизации для определения параметров алгоритма управления их значения вычисляются точно без привлечения численных методов. При использовании нелинейных желаемых свойств движения сочетаются высокая точность и быстродействие без перерегулирования. Кроме того, обеспечивается устойчивость и адаптивное управление и качество функционирования, близкое к потенциальным возможностям управляемых систем. Рассмотрим управляющую функцию Здеськонстанта,0. Для системы с обратной связью по выходной переменной исполнительного механизма рассматривается управление в виде Если начальное состояние 0 не является существенным В частном случае, когда используются линейные эталонные свойства движения вида При нулевых начальных условиях выражение (23) имеет вид Входящие в выражение (24) константы 0 и 1 выступают в качестве весовых коэффициентов. С другой стороны, их значения рассчитываются точно, согласно (22), через параметры желаемых свойств движения управляемой системы. В выражениях (20)-(24) индексдля простоты опущен. 14 5182 1 Приведенные критерии качества управления, формулировка задач и алгоритмы адаптивного управления позволяют реализовать интегрированные системы управления, функционирующие как на основе измерений сигналов, соответствующих кинематическим величинам (угловым скоростям колес и др.), так и силовым (силам/моментам). Выбор желаемого принципа функционирования производится при инсталляции системы. Рассмотрим особенности функционирования основных компонент интегрированной системы в соответствии с рассмотренными алгоритмами. Антиблокировочная система (АБС). Если не предпринимать специальных мер,формируемые в соответствии с указаниями водителя тормозные силы/моменты могут превосходить величины, которые могут быть фактически реализованы по условиям сцепления колес с дорогой в конкретных условиях. АБС, обеспечивая скольжение колес в допустимых пределах, предотвращает блокирование колес при торможении и повышает устойчивость колес к боковым возмущениям, позволяя управлять транспортным средством без блокирования колес. При торможении на повороте и на дороге типа микст возникают поперечные силы,которые способствуют заносу. Для предотвращения заноса контролируются также поперечные силы и задаваемый водителем угол поворота рулевого колеса, с учетом которых корректируется сигнал управления торможением. Рассмотрим функционирование АБС, в которой наблюдаемыми являются сигналы,соответствующие фактически реализуемым колесами скоростям изменения тормозных сил/моментов(11,2 число осей 1 соответствует левому борту, а 12 - правому борту). Пусть 1 множество свойств, характеризующих фактическое динамическое состояние системы для -го колеса (1, ,1, 2) в тормозном режиме, а 1 множество допустимых свойств движения, например где 1 скорость изменения давления 1 рабочего тела в главном тормозном цилинд ре. Переменные 1 и 1 отражают действия водителя при торможениивремя наблюдения. Множество допустимых свойств движения может рассматриваться относительно 1( ),( )0, если 1 ( )0,1, ,1, 2 0. 1 Если предполагается, что движениего колеса при торможении является неустойчивым при 11 , АБС должна управлять исполнительными механизмами таким образом, чтобы в каждый момент времени обеспечить выполнение условия 11 . При этом,если 11 действия водителя не корректируются, т.е. управляющий сигнал принимается равным нулю. В качестве выходной переменной рассматриваются скорости изменения фактических тормозных сил/моментов, для которых должны задаваться их командные величины 1(0 ). Последние для всех колес (11,2 ) можно принять одинаковыми,1 1 Заданием величины(в качестве которой выбирается малая неотрицательная вели 1 чина), скольжение регулируется таким образом, чтобы оно находилось в зоне устойчивости кривой коэффициент сцепления-коэффициент скольжения, несколько опережая экстремум, т.е. находясь левее этого экстремума. Таким образом, АБС управляет сигналами, соответствующими скоростям изменения фактически реализуемых колесом тормозных сил/моментов. Итак, задача адаптивного управления АБС состоит в следующем. Измеряются отра жающие действия водителя при торможении сигналы, соответствующие скорости 1 изменения давления рабочего тела в главном тормозном цилиндре, сигналы, соответст вующие фактическим скоростям изменения тормозных сил/моментов, являющиеся 1 функциями совместных действий водителя и АБС. На их основе, с учетом сигналов, соот ветствующих заданным командным величинам, формируются желаемые свойства дви 1 жения (14) и осуществляющие эти свойства при граничных условиях (1) и (2) сигналы управления в соответствии с алгоритмами (18) либо (20). Управление осуществляется таким образом, что в последовательные моменты времени 1 ,,1 , сигналы, соответствующие управляемым переменным, стре мились к заданным командным величинампо оптимальной траектории, являющейся 1 решением уравнения эталонного движения (14). При соответствующем выборе оператора(.) это движение в любой из моментов времени осуществляется с высоким быстродействием и точностью без перерегулирования. Используемые в алгоритме вычисления сигнала управления сигналы, соответствующие ненаблюдаемым переменным, идентифицируется путем интегрирования и/или дифференцирования сигналов, соответствующих наблюдаемым переменным. Алгоритм идентификации определяется порядком производной наблюдаемого сигнала, соответствующего выходной переменной (задается при инсталляции системы). Для АБС при инсталляции могут быть выбраны схемы ,либо . Максимальный тормозной эффект достигается при индивидуальном регулировании тормозного момента на каждом из колес (схема ). Возникающий при этом разворачивающий момент, в частности на дорогах типа микст, а также в других случаях, компенсируется в дальнейшем системой, предотвращающей потерю устойчивости (отклонение от курса). При таком подходе обеспечивается наиболее эффективный режим торможения в нестационарных условиях движения. Нетрудно видеть, что осуществлена редукция задачи, регламентирующей скольжение колес при торможении, к задаче адаптивного управления. При этом могут быть реализованы системы, функционирующие как на кинематическом, так и на силовом принципах. Если выбран силовой принцип функционирования системы, не требуется наблюдать сигналы, соответствующие угловым скоростям колес и курсовой скорости транспортного средства. Кроме того, отпадает необходимость в использовании достаточно сложных алгоритмов идентификации коэффициентов сцепления колес с дорогой. Противобуксовочная система (ПБС). Формируемые двигателем фактические тяговые силы/моменты на ведущих колесах в отдельные моменты времени могут превосходить допустимые по условиям сцепления колес с дорогой. При этом происходит буксование, следствием которого может быть потеря устойчивости движения мобильной машины. Для того, чтобы буксование ведущих колес изменялось в допустимых пределах, используют ПБС, которые, регламентируя буксование колес, повышают устойчивость движения машины. 16 5182 1 Регулирование коэффициента буксования осуществляется ПБС путем снижения крутящего момента двигателя, подтормаживания ведущих колес, блокировки дифференциала и др., т.е. с использованием различных исполнительных механизмов. При этом некоторые из них используются совместно с АБС и другими системами (совместное использование ресурсов). В алгоритмы управления (18) либо (20) в качестве управляемых переменных передают ся скорости изменения тяговых сил/моментов 2 и их командные величины(0 ). 2 2. Последние можно принять для всех ведущих осей (1 ) одинаковыми Пусть 2 множество свойств, характеризующих фактическое динамическое состояние управляемой системы в тяговом режиме, а 2 множество допустимых свойств движения ведущих колес в тяговом режиме. Множество 2 корректируется с развитием теории и практики движения мобильных машин. Тогда движение ведущих колес будет устойчивым, если 22 . Если наблюдаются производные тяговых сил/моментов для ведущих колес, а также производная 2 перемещения 2 педали акселератора (позиционера подачитоплива или рейки топливного насоса высокого давления), допустимые свойства движения могут, например, иметь вид Переменные 2 и 2 отражают действия водителя при разгоне машины. Пусть, например, при инсталляции интегрированной системы выбран силовой принцип функционирования ПБС и наблюдаются сигналы, соответствующие реализуемым ве дущими колесами скоростям изменения фактических тяговых сил/моментов 2(11,2 число ведущих осей). Если в тяговом режиме для какого-либо из ведущих колес выполняется условие 22 , формируется сигнал управления соответствующими исполнительными механизмами, последовательность использования которых указывается при инсталляции системы. Так, в зависимости от выбранного при инсталляции системы алгоритма производится или уменьшение подачи топлива (снижение оборотов двигателя), или подтормаживание соответствующих ведущих колес, или блокировка дифференциала соответствующего борта (если мобильная машина оснащена соответствующим средством) и т.п. Таким образом, управление ПБС при выборе силового принципа функционирования сводится к задаче адаптивной стабилизации скорости изменения фактических тяговых сил/моментов в случае, когда 22 . Если 22 действия водителя не корректируются, т.е. управляющий сигнал принимается равным нулю. При кинематическом принципе функционирования задача адаптивного управления состоит в управлении исполнительными механизмами так, чтобы обеспечивалась работа ведущих колес в зоне устойчивости кривой коэффициент сцепления-буксование колес с некоторым опережением. Движениего ведущего является неустойчивым, если 22 . ПБС в каждый момент времени должна управлять исполнительными механизмами таким образом, чтобы обеспечить условие 22 . Если 22 действия водителя не корректируются, т.е. управляющий сигнал принимается равным нулю. Итак, ПБС функционирует следующим образом. Наблюдается сигнал 2 , соответствующий действиям водителя (скорость перемещения педали акселератора или позиционера подачи топлива) при разгоне/замедлении машины, и сигналы, соответствующие фак 17 тическим тяговым силам/моментам 2 и/или их производным 2 , что предпочтительнее, являющиеся функциями совместных действий водителя и ПБС. На основании командных и фактических величин выходной переменной и ее производной формируются желаемые свойства движения (14) выходной переменной и сигналы управления в соответствии с алгоритмами (18) или (20). Если буксование ведущих колес является допустимым ( 22 ), принимается 0 , т.е. действия водителя не корректируются. Если 22 , производится коррекция действий водителя совместным использованием предоставленных при инсталляции системы управления ресурсов (регулированием подачи топлива, активацией тормозной системы колеса соответствующего борта,блокированием дифференциала повышенного трения и др.). Используемые в алгоритме управления сигналы, соответствующие ненаблюдаемым переменным, идентифицируется путем интегрирования/дифференцирования сигналов, соответствующих наблюдаемым переменным. Нетрудно видеть, что функции ПБС редуцированы к задаче адаптивного управления. Рассмотренные для АБС/ПБС принципы и алгоритмы используются и для других систем управления. Система контроля курсовой устойчивости (СКУ). Процессы взаимодействия мобильной машины с внешней средой, особенно при криволинейном движении, достаточно сложны и определяются многими факторами, в том числе состоянием внешней среды и объекта управления, курсовой скоростью движения, кривизной курсовой траектории,свойствами приводов и исполнительных механизмов и др. В каждом конкретном случае в зависимости от полноты используемой информации могут быть реализованы системы различного уровня. Тем не менее при этом могут использоваться рассмотренные алгоритмы адаптивного управления. Курсовая устойчивость транспортного средства характеризуется способностью сохранять ориентацию продольной оси симметрии (оси крена). Если сигналы, соответствующие углу и скорости угла рысканья, возникшие вследствие какого-либо возмущения, пристремятся к нулю, то курсовое движение транспортного средства является устойчивым. Боковое скольжение (занос) начинается, если суммарная сила реакции в пятне контактаго колеса равна или превышает силы сцепления, т.е. если будет нарушено соотношение 2 2,11, 2 ,(25) где, ,соответственно вертикальная, продольная и поперечные реакции. Здесь соответствуют фактическим тормозным/тяговым силам/моментамкоэффициент сцепленияго колеса с дорогой. Как видно из формулы (25), занос может произойти либо тогда, когда большие боковые силы, либо тогда, когда велики продольные силы и достаточно сравнительно малых боковых сил, чтобы вызвать занос. В связи с этим занос наиболее вероятен при движении на повороте или вдоль косогора. В этих случаях, особенно при малых радиусах поворота и большой скорости или больших углах косогора, боковые силы значительны. Занос возможен при торможении, когда продольные реакции колес приближаются к предельным значениям, равным силам сцепления. Тогда достаточно приложить достаточно малую боковую силу, чтобы начался занос. Естественно, что при сочетании двух факторов, например при торможении в процессе поворота или на косогоре, увеличивается вероятность заноса. 5182 1 Занос также возможен при интенсивном разгоне, если ведущие колеса реализуют продольную реакцию, близкую к силе сцепления ведущих колес с дорогой. Это относится к динамичным транспортным средствам с большой удельной мощностью. Машины с передними ведущими, а задними ведомыми колесами обладают большей устойчивостью против заноса, так как в этом случае снимается тяговое усилие с колес задней оси и остается больший запас для боковой силы этих колес. Опасна же потеря устойчивости именно задней оси. Поэтому в алгоритме управления должны быть учтены все эти комбинации. Суммарные силы на колесах с левого и правого бортов могут быть не эквивалентными по многим причинам. При движении мобильной машины по дороге с бортовой неравномерностью коэффициентов сцепления (например, левые колеса находятся на асфальте, а правые на скользкой обочине и др.), а также на дороге с однородным покрытием при существенной разнице нормальных нагрузок на колесах из-за неравномерности распределения груза или на повороте, при разгоне/торможении, при использовании в АБС схемыи др. Вследствие упомянутых факторов может возникнуть рассогласование между суммарными фактическими силами/моментами, действующими с левого и правого бортов транспортного средства, приводящее к потере устойчивости движения мобильной машины. Упомянутое рассогласование должно компенсироваться системой управления таким образом, чтобы предотвратить потерю курсовой устойчивости. Теория мобильных машин позволяет сформулировать множество свойств движения,при котором движение устойчиво. Ситуации, приводящие к неустойчивости движения,могут быть введены в память контроллера. Наблюдаемыми среди прочих переменных являются сигналы, соответствующие фактически реализуемым колесами суммарным силам/моментам 0 (11,2 число осей 1 соответствует левому борту, а 2 - правому борту) или их скоростям. Здесь 22 . В случае 00 2 0. Пусть 0 множество свойств, характеризующих фактическое динамическое состоя ние системы (1, ,1, 2) , а 0 множество свойств, гарантирующих устойчивое курсовое движение. Оно уточняется с развитием теории и практики. Если в результате анализа текущего состояния мобильной машины прогнозируется 00 , система адаптивного управления вырабатывает сигнал управления предоставленными в распоряжении системы исполнительными механизмами таким образом, чтобы обеспечить условие 00 . Пусть на основе наблюдаемых фактических величин (тяговых/тормозных усилий и/или их скоростей и др.) формируются суммарные сигналы и/или их производные, характеризующие устойчивость курсового движения. Рассмотрим функцию12,(26) 12 где 1 , 2 расстояния в горизонтальной плоскости от центра пятнаго пневматика до оси рысканья. Значениязадаются с минусом для колес левого борта (1 ) и с плюсом для колес правого борта (2 ). Будем рассматривать( ) как выходную переменную системы управления. Потребуем,чтобы рассогласование удовлетворяло уравнению эталонного движения (14) при граничных условиях (1) и (2). При такой формулировке минимизируется рассогласование между суммарными фактическими силами/моментами с левого и правого бортов мобильной машины в каждый момент времени. 19 5182 1 Управление может осуществляться исполнительными механизмами, алгоритм использования которых указывается при инсталляции системы. Так, например, могут быть активизированы соответствующие модуляторы давления рабочего тела, исполнительные механизмы, управляющие подачей топлива, либо и то и другое одновременно. Во всех случаях сигналы управления вычисляются согласно алгоритмов (18) либо (20). Уравнения движения амортизированной массы мобильной машины относительно оси рысканья имеют вид где 3 момент инерции амортизированной массы относительно оси рысканья. Продифференцировав выражение (27), получим Таким образом, если наблюдаются сигналы, соответствующие скоростям изменения фактических суммарных сил с левого и правого бортов мобильной машины, согласно (28),вычисляется сигнал, соответствующий третьей производной угла рысканья, интегрированием которого могут быть получены величины, необходимые для формирования эталонного движения (14) и сигнала управления согласно формул (18) или (20). При этом датчики информации и исполнительные механизмы используются системой контроля курсовой устойчивости совместно АБС, ПБС. Для корректировки сигнала управления может быть использоваться пороговая величина( ), если( )0 , ( )(29) 0, в противном случае. Здесь 0 заданная константа,00( )рассогласование, вычисляемое согласно выра жению (26). Как видно, при( )0 система управления никаких действий не производит. Возможен вариант реализации системы, когда для измерения скорости угла рысканья и/или скорости угла рысканья используются специальные измерительные устройства.этом случае в качестве выходной переменной рассматривается угол рысканья и задача обеспечения курсовой устойчивости транспортного средства сводится, по-прежнему, к задаче адаптивного управления в соответствии с заданными свойствами движения вида(14) при граничных условиях (1) и (2) путем формирования сигналов адаптивного управления в соответствии с формулами (18) или (20). Система, предотвращающая опрокидывание (СПО). Передающиеся на корпус транспортного средства суммарные силы/моменты, если не предпринимать специальных мер, при определенных комбинациях могут привести к опрокидыванию. Под опрокидыванием понимается потеря устойчивости транспортного средства относительно осей крена или тангажа. Если угол крена и скорость угла крена, возникшие вследствие какого-либо возмущения, пристремятся к нулю (для склоноходов при этом угол крена стремится к заданной величине угла крена), движение мобильной машины устойчиво по опрокидыванию. Для количественной оценки этого свойства может использоваться время и траектория возвращения параметров возмущенного движения к исходным. Предельным случаем потери устойчивости является опрокидывание. Наиболее неблагоприятен поворот на косогоре в тот момент, когда ось крена параллельна косогору, а центр поворота находится выше проекции оси крена на плоскость косогора. Мобильная машина при этом поворачивает в гору. 20 5182 1 Пусть 3 множество свойств, характеризующих фактическое динамическое состояние мобильной машины с точки зрения опрокидывания, а 4 множество свойств, характеризующих устойчивость движения по опрокидыванию. Рассмотрим устойчивость корпуса мобильной машины относительно оси крена. Приведенные соображения также справедливы для оси тангажа. Пусть на основе наблюдаемых сигналов, соответствующих углу крена и/или производным угла крена корпуса мобильной машины прогнозируется возможная потеря устойчивости по боковому опрокидыванию. Требуется путем создания соответствующего стабилизирующего момента предотвратить опрокидывание. Величины и/или могут быть рассчитаны либо для их наблюдения могут быть использованы соответствующие измерительные устройства. Рассмотрим подход, при котором они не используются. Пусть, например, поперечно-угловые колебания стабилизируемой (амортизированной) массы описываются уравнениями 2,11,2 ,(30)где 2 момент инерции амортизированной массы транспортного средства относительно оси кренасвязки упруго-диссипативных и управляющих (активных) силрасстояния в горизонтальной плоскости от точек крепления упруго-диссипативных элементов и сервоцилиндров до вертикальной плоскости, проходящей через ось крена. Слева от центра масс, если смотреть по ходу движения транспортного средства, значенияпринимаются со знаком минус. Формула (30) предполагает что исполнительные сервоприводы установлены последовательно с упругими элементами. Продифференцировав выражение (30), получим(31)Из выражения (31) видно, что наблюдая сигналы, пропорциональные скорости изменения передаваемых стабилизируемой массе сил/моментов, можно получить третью производную угла крена. Ненаблюдаемые переменные, используемые в алгоритме управления, могут быть получены затем путем интегрирования. Затем формируются желаемые свойства движения (14) амортизированной массы и рассчитываются осуществляющие эти свойства сигналы адаптивного управления согласно формул (18) либо (20). При этом производится также умерение поперечно-угловых колебаний амортизированной массы. Для снижения энергетических затрат алгоритмы управления (18) либо (20) дополняются условиями, при которых энергия вводится в систему только в случае, если 33 . Так, например, чтобы система не работала непрерывно, можно ввести условие 0 , если 44 . Рассмотрим рассогласование12,1 . Здесь используются связки сил, передающихся на корпус транспортного средства с левого и правого бортов, соответственно. Для рассогласований в каждый рассматриваемый момент времени будут формироваться желаемые свойства движения (14) и управления (18) либо (20), обеспечивающие эти свойства при удовлетворении условий (1) и (2). Задачу можно упростить, формируя стабилизирующий момент для каждой оси формируется на основе условия 12 (1 ) . 21 5182 1 Нетрудно видеть, что задача предотвращения опрокидывания редуцируется к задаче адаптивного управления сервоцилиндрами каждой опоры путем формирования желаемых свойств (14) изменения рассогласования и сигналов управления на основе алгоритмов адаптивного управления (18) либо (20). Рассмотрим устойчивость мобильной машины относительно оси тангажа. Пусть 4 множество свойств, характеризующих фактическое динамическое состояние транспортного средства с точки зрения устойчивости транспортного средства относительно оси тангажа, а 4 множество свойств движения, при выполнении которых гарантируется устойчивость относительно оси тангажа. Пусть, например, продольно-угловые колебания корпуса (амортизированной массы) описываются уравнениями движения 1,11,2 ,(33)где 1 момент инерции амортизированной массы относительно оси тангажарасстояния от осей до центра масс в вертикальной плоскости, проходящей через ось крена. Значениявпереди центра масс по ходу движения транспортного средства принимаются со знаком минус. Продифференцировав выражение (33), получим(34)Из выражения (34) видно, что, наблюдая скорости изменения передаваемых стабилизируемой массе сил/моментов, можно вычислить третью производную угла тангажа. Необходимые для формирования сигнала управления не наблюдаемые переменные могут быть получены путем интегрирования. Затем формируются желаемые свойства движения (14) и, согласно алгоритмов (18) либо (20), вычисляются сигналы адаптивного управления. При таком управлении производится также умерение продольно-угловых колебаний амортизированной массы мобильной машины. Для снижения энергетических затрат используется, например, условие 0 , если 44 . Наиболее неблагоприятным случаем опрокидывания относительно оси тангажа является торможение на спуске с горы, когда моменты от составляющей силы тяжести, параллельной опорной поверхности, и от силы инерции направлены в одну сторону. Для предотвращения опрокидывания транспортного средства на косогоре, на спуске или на подъеме необходимо обеспечить, чтобы сползание (скольжение) наступало при меньших углах, чем опрокидывание. Система активной виброзащиты и стабилизации (СВС). Система адаптивной виброзащиты служит для умерения колебаний амортизируемой массы (корпуса, кабины,сиденья водителя) и стабилизации его статического положения. Наблюдаемыми являются связки фактических упруго-диссипативных и активных сил(1,2 ,311,2 ), передающихся на амортизируемую (стабилизируемую) массу, и/или скорости их изменения, а также выходные переменные исполнительных ме ханизмови/или их скорости. Так, например, перемещения плунжеров электрогидравлических исполнительных механизмов, плунжера которых соединены с амортизируемой массой релаксационным упругим элементом. Пусть, например, уравнения движения, описывающие вертикальные колебания центра масс амортизируемой/стабилизируемой массымобильной машины имеют вид 22 где, ,вертикальное перемещение, скорость и ускорение центра масс соответственно. Продифференцировав выражение (35) и разделив на, получим(36)Из выражения (36) видно, что на основе наблюдений производных фактически передающихся на амортизируемую массу сил может быть получена скорость изменения ускорений центра масс. Соответствующие ускорения, скорости и перемещения затем могут быть получены путем интегрирования. На основании командной и фактической величин управляемой переменной и их производных формируются желаемые свойства движения (14), а затем, используя фактические величины выходных переменных исполнительных механизмов и/или их производных, рассчитываются сигналы адаптивного управления в соответствии с формулами (18) или (20). В системе активной виброзащиты в уравнении (14) эталонного движения командная величина выходной переменной принимается равной нулю. Как видно, задача не отличается от ранее рассмотренных. Уравнения движения здесь, как и прежде, приведены лишь для иллюстрации основных положений. Для управления в реальном времени они не требуются. Активная система позволяет реализовать как динамическую, так и статическую стабилизацию пространственного положения соответствующей массы. Динамическим регулированием поддерживается постоянство положения и в случае появления сравнительно медленных возмущающих факторов, таких как клевки при разгоне и торможении, крены при повороте. Таким образом, в задаче активной адаптивной виброзащиты наблюдаются фактиче ские скорости изменения связок упруго-диссипативных сили/или связок сил, а также скорости измененияи/или перемещенияплунжеров исполнитель ных механизмов, установленных на соответствующих опорах. Наблюдение скоростей из менения связок фактических силадекватно наблюдению третьей производной ускорений амортизированной массыв точке крепления соответствующих элементов,которые порождают связки упомянутых сил. При этом Здесьмасса, приходящаяся наю опору в положении статического равнове сия. Таким образом, после определенияинтегрированием могут быть получены соответственно ускорение, скорость и перемещение надй опорой. С другой стороны, измерение ускорений не представляет затруднений. Затем идентифицируются остальные необходимые для формирования уравнений эталонного движения переменные. Желаемые свойства движения (14) и сигнала управления (18) либо (20) формируются для каждой опоры. Исполнительные механизмы системы активной виброзащиты позволяют установить желаемое относительное положение амортизируемой массы при изменении статической нагрузки. Статическим регулированием поддерживается, например, постоянство расстояния между амортизированной и неамортизированной массами для каждой оси или каждо 23 5182 1 го колеса. При этом регулирующее устройство должно действовать с достаточным запаздыванием, чтобы не реагировать на относительные колебания при функционировании системы в реальном времени. Чтобы регулирование происходило только при статическом изменении нагрузки и регулятор не реагировал на динамические изменения нагрузки при движении транспортного средства, вводится замедление включения регулятора (чаще всего гидравлическое), реализуемое аппаратно. При инсталляции системы в режиме дружеского диалога задаются желаемые схемы активной виброзащиты по каждой опоре, по крайним опорам одного борта транспортного средства со связыванием полостей сжатия сервоцилиндров промежуточных опор этого борта и др. Аналогично в зависимости от выбранной при инсталляции системы схемы статическим регулированием можно поддерживать заданное статическое положение для каждой оси или каждого колеса. Система управления рулевым механизмом с усилителем. Система управления рулевым управлением с усилителем рассматривается как адаптивная следящая система, отрабатывающая задаваемый водителем командный сигнал , соответствующий углу поворота рулевого колеса. Наблюдаются сигналы, соответствующие командной величине углового перемещения системы и/или ее скорость . На их основе формируются желаемые свойства движения(14), а затем сигналы адаптивного управления в соответствии с формулами (18) либо (20). В системе управления рулевым управлением могут использоваться и другие информативные переменные, такие как также скорость движения мобильной машины, поперечное ускорение амортизированной массы и нагрузки на управляемые оси и др. Эталонные их значения могут быть введены в запоминающее устройство, по которым корректируется,например, сигнал для дозирующего клапана, который обеспечивает модуляцию электрическим сигналом давления в гидравлическом контуре рулевого механизма. Значения переменных, влияющих на корреляцию между прилагаемыми усилиями на рулевом колесе и выходными усилиями на колесах, хранятся в запоминающем устройстве. Таким образом, характеристики системы управления рулевым механизмом с усилителем адаптируются к изменяющимся эксплуатационным условиям. Если система не в состоянии обеспечить с заданной точностью возложенные на нее функции, формируется сигнал управления исполнительными механизмами (например, актюатором дроссельной заслонки), в соответствии с которым корректируется скорость движения мобильной машины. Таким образом, задача управления рулевым механизмом с усилителем редуцируется к задаче адаптивного слежения, состоящей в обеспечении заданных свойств движения вида(14) в каждый момент времени. Отличие от ранее рассмотренных систем лишь в том, что командная величина является переменной, и вместо задач типа адаптивной стабилизации рассматривается задача адаптивного слежения. Система управления двигателем. Управление двигателем может осуществляться ПБС, системой, обеспечивающей минимальный расход топлива, и/или другими системами. Коррекция крутящего момента/мощности двигателя может быть реализована путем управления впрыском топлива, зажиганием, электронной дроссельной заслонкой и другими способами. Уравнения движения двигателя 1,гдемомент инерции двигателя и приведенных к валу двигателя массмомент, развиваемый двигателем( 1 ,)1 ,1 угловые корость и угловое ускорение вала двигателя соответственноперемещение актюатора дроссельной заслонкимомент сопротивления (нагрузка двигателя). 24 5182 1 При изменениипроисходит изменение момента двигателяв соответствии со скоростными характеристиками двигателя. При электронном управлении впрыском оптимальное количество топлива, впрыскиваемого в цилиндры дизельного двигателя, учитываются обороты двигателя и эксплуатационные условия, положение педали акселератора,температура и давление воздуха наддува, температура топлива, скорость движения мобильной машины, положение рейки топливного насоса высокого давления (ТНВД) и др. Предельные значения по составу выхлопных газов, механическим и тепловым нагрузкам двигателя, параметры привода ТНВД и др. заносятся в память контроллера. На основании фактических величин выходной переменной и ее скорости, командной величины выходной переменной формируются желаемые свойства движения (14) и осуществляющие эти свойства сигналы адаптивного управления по формулам (18) либо (20). При управлении бензиновыми двигателями также формируются желаемые свойства движения (14) и в соответствии с формулами (18) либо (20) сигнал адаптивного управления впрыском топлива на установившихся и переходных режимах, зажиганием с предупреждением детонации в отдельных цилиндрах, холостым ходом и др. Следует отметить, что аналогично реализуется система поддержания постоянной скорости транспортного средства. В этом случае для курсовой скорости формируются желаемые свойства движения (14) и осуществляющие эти свойства сигналы управления согласно формул (18) либо (20). Здесь не ставится цель привести полное описание алгоритма управления. Выше показана лишь возможность использования развиваемого подхода и в этом случае. Другие системы управления. Рассмотренные критерии, формулировка задачи и алгоритмы управления в полной мере относятся и к другим системам управления, в частности к системе управления автоматической коробкой перемены передач. При этом наблюдаются изменения нагрузки и обороты двигателя, курсовая скорость, выходные переменные ретардера, положение педали акселератора и др. На основе фактических величин выходной переменной и/или ее скорости, заданной командной величины формируются желаемые свойства движения (14) для выходной переменной и сигналы управления согласно формул (18) либо (20). В результате достигается оптимальный контроль, например,выходных моментов и правильный выбор последовательности переключения передач с помощью сервоцилиндров. Информационно-диагностическая система. Выполняющая информационные и диагностические функции система осуществляет вывод информации о состоянии всех модулей и рекомендации по устранению неисправностей, а также обеспечивает диагностической информацией. Использование информационной и диагностической системы сокращает расходы по эксплуатации мобильной машины, оснащенной интегрированной системой управления свойствами движения. Бортовая система обладает дополнительными возможностями,включая запасные рабочие функции или рекомендуя водителю определенные нормы поведения в зависимости от возникшей неисправности. Диагностическая система стандартизируется по каждому модулю, оснащаемому унифицированным интерфейсом, который выполняет функции передачи кодов неисправностей на центральный дисплей мобильной машины и передачи данных на внешнее диагностическое оборудование. Для этого система бортовой диагностики дополняется стационарным оборудованием, на которое диагностическая информация, в том числе отчеты по аварийным и другим ситуациям, передается через специальный диагностический интерфейс. 5182 1 Источники информации 1. Патент 1408 1,60 8/52. Противоблокировочная тормозная система транспортных средств. Приоритет изобретения от 01.07.93. Авторы Фурунжиев Р.И., Ким В.А. 2. Патент 2103191 1, 660 8/52. Способ управления антиблокировочной системой торможения транспортного средства. Приоритет изобретения от 03.07.96. Авторы Лобах В.П., Бочкарев Г.В., Ким В.А., Ким Ф.А., Портасенок В.С., Фурунжиев Р.И. 3.. .98/01332... 15, 1998.-. ( 60 8/52. Способ управления антиблокировочной системой торможения транспортного средства. Авторы Ким В.А., Лобах В.П., Портасенок В.С., Фурунжиев Р.И.). 4.5,135,290 . 4, 1992 ( - ,, , . .)- 35 35 843. 5. Автоэлектроника за рубежом Информационный сборник. - Вып. 1. - М., 1992. С. 76-85. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60K 41/00
Метки: управления, движением, средства, транспортного, фурунжиева, способ
Код ссылки
<a href="https://by.patents.su/26-5182-sposob-furunzhieva-upravleniya-dvizheniem-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Способ Фурунжиева управления движением транспортного средства</a>
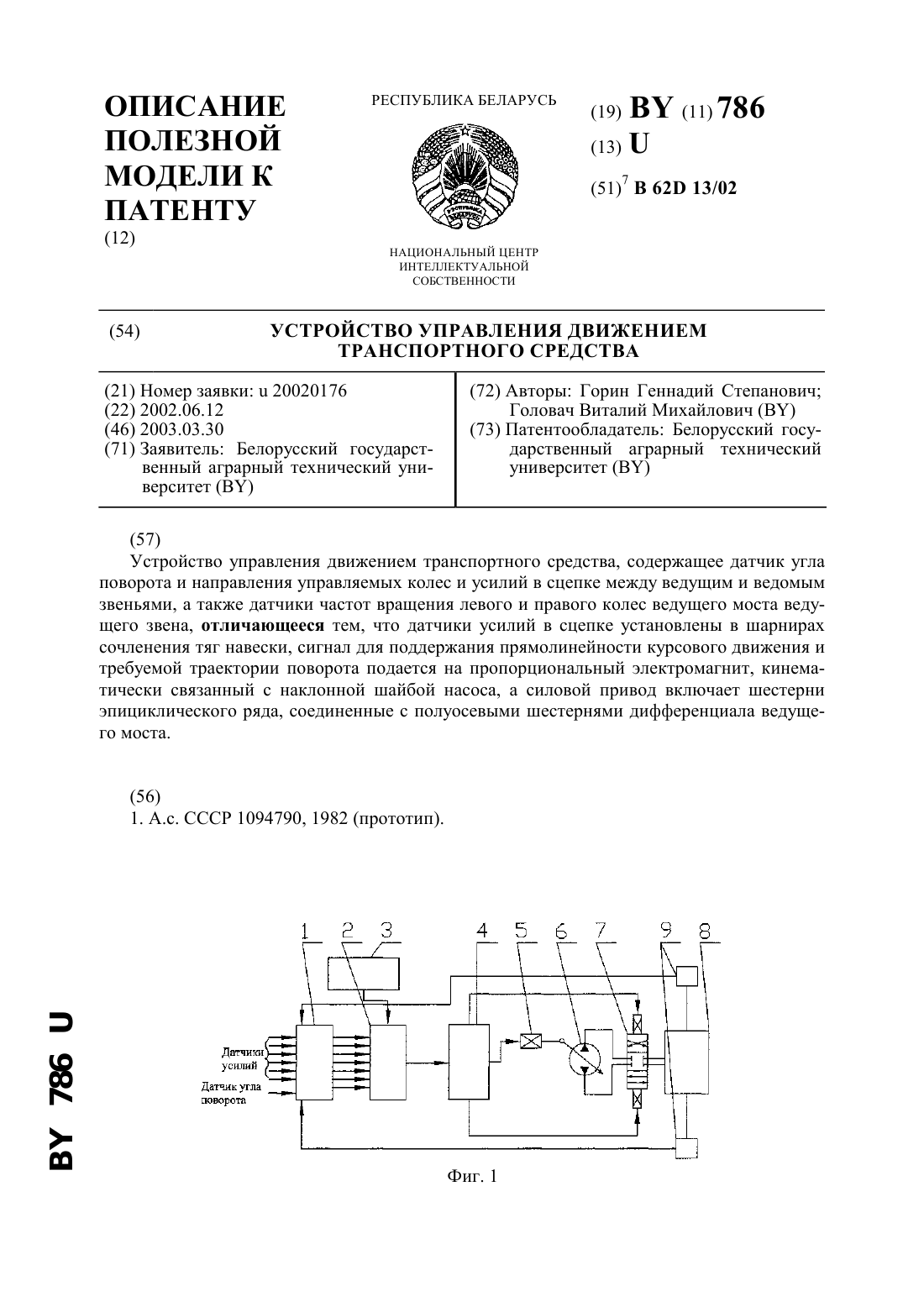
Устройство управления движением транспортного средства
Номер патента: U 786
Опубликовано: 30.03.2003
Авторы: Горин Геннадий Степанович, Головач Виталий Михайлович
МПК: B62D 13/02
Метки: управления, транспортного, движением, устройство, средства
Текст:
...и задних колес при повернутом для уменьшения транспортного коридора путем поддержания необходимого соотношения скоростей вращения внешних и внутренних колес. Названная задача решается устройством управления движением транспортного средства, которое содержит датчик угла поворота и направления управляемых колес и усилий в сцепке между ведущим и ведомым звеньями, а также датчики частот вращения левого и правого колес ведущего моста ведущего...
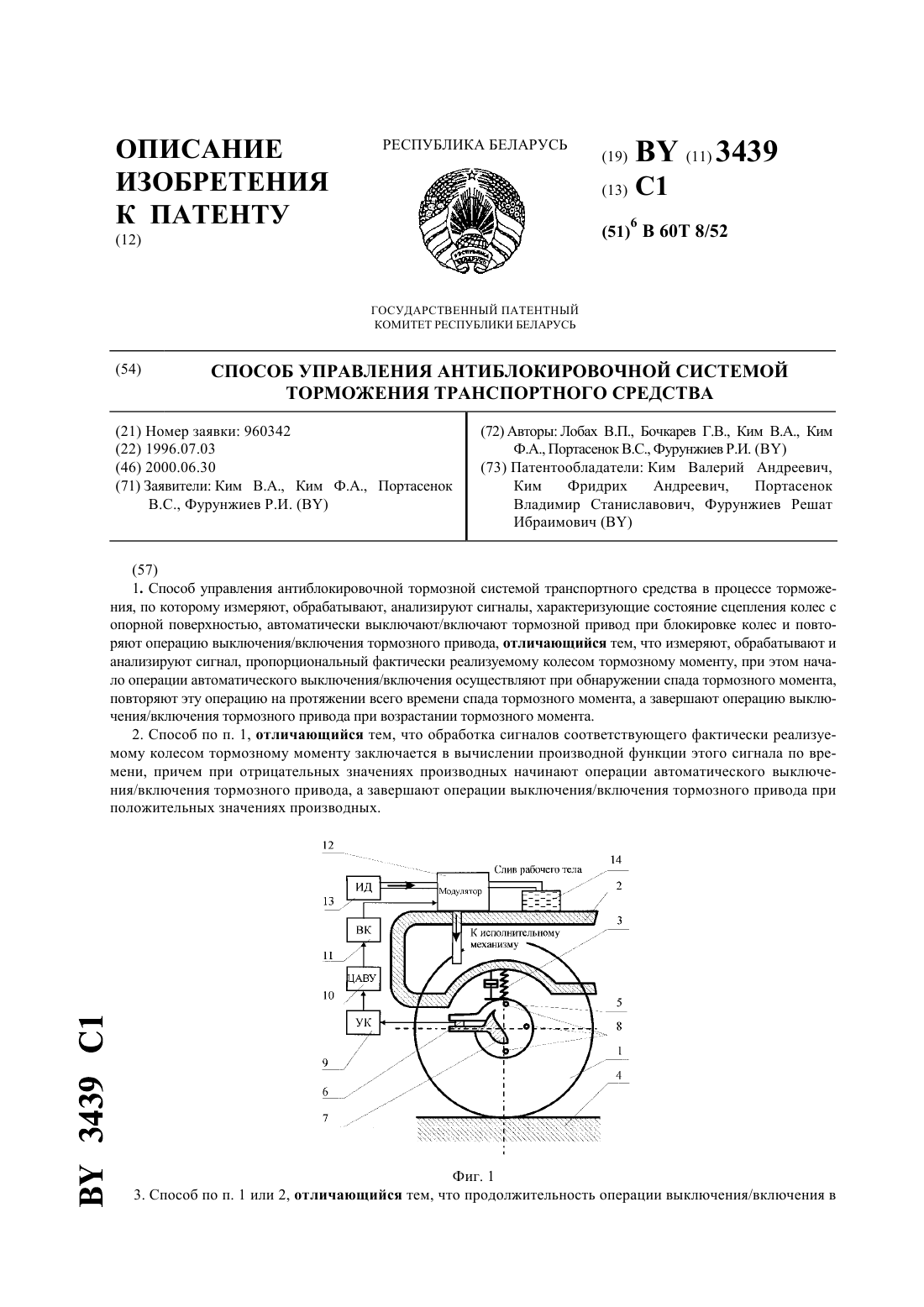
Способ управления антиблокировочной системой торможения транспортного средства
Номер патента: 3439
Опубликовано: 30.06.2000
Авторы: Ким Фридрих Андреевич, Фурунжиев Решат Ибраимович, Ким Валерий Андреевич, Лобах Василий Павлович, Портасенок Владимир Станиславович, Бочкарев Геннадий Владимирович
МПК: B60T 8/52
Метки: системой, управления, транспортного, торможения, антиблокировочной, средства, способ
Текст:
...при отрицательных значениях производных начинают операции автоматического выключения/включения тормозного привода, а завершают операции выключения/включения тормозного привода при положительных значениях производных. Поставленная задача решается также и тем, что продолжительность операции выключения/включения в интервале времени от выключения до включения тормозного привода определяют в зависимости от электромеханических свойств модуляторов...
Устройство управления процессом торможения транспортного средства
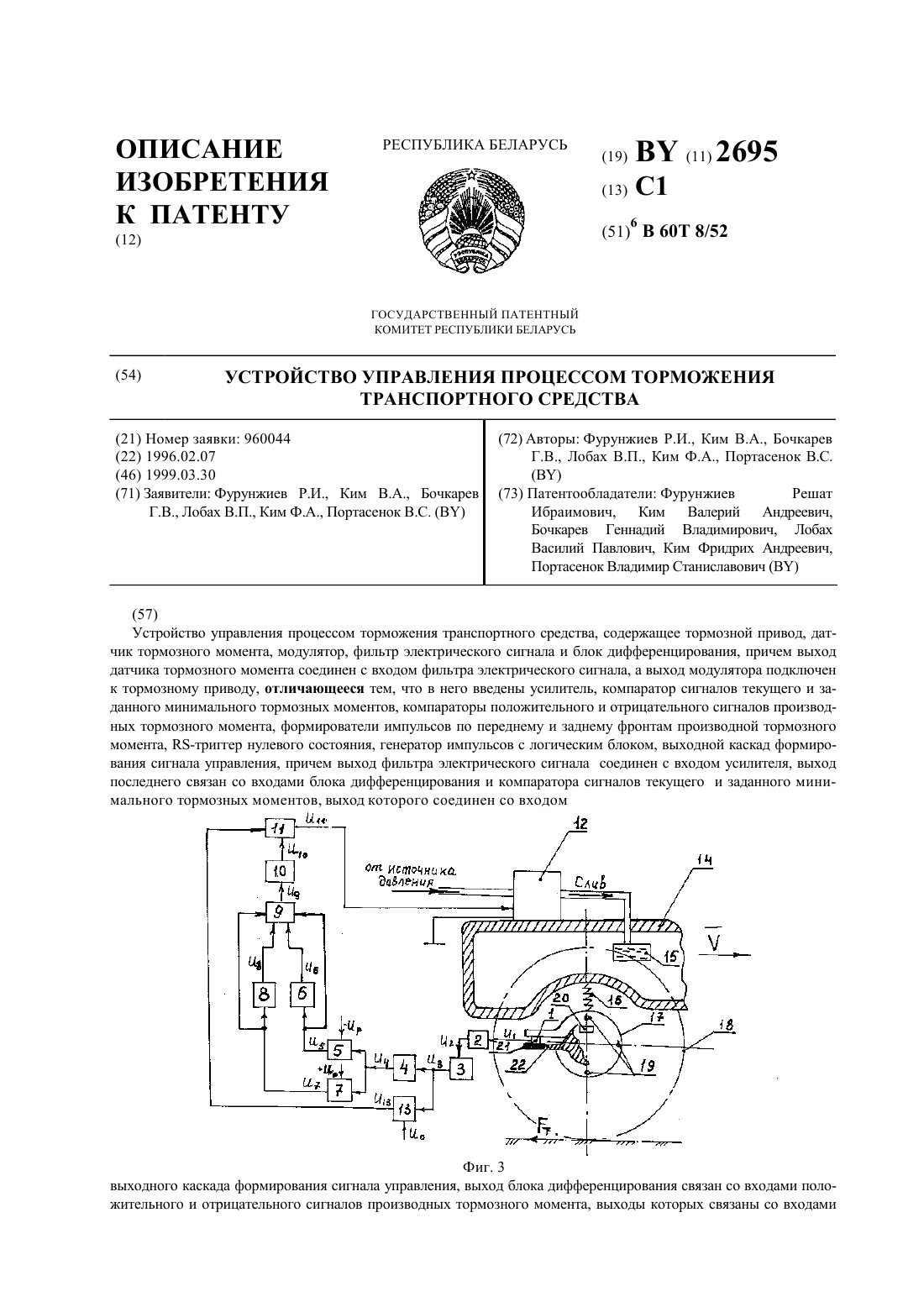
Номер патента: 2695
Опубликовано: 30.03.1999
Авторы: Ким Валерий Андреевич, Фурунжиев Решат Ибраимович, Лобах Василий Павлович, Бочкарев Геннадий Владимирович, Ким Фридрих Андреевич, Портасенок Владимир Станиславович
МПК: B60T 8/52
Метки: средства, устройство, управления, транспортного, торможения, процессом
Текст:
...электрического сигнала 2, усилитель сигнала 3, блок дифференцирования 4, компаратор сигналов, соответствующих текущему и заданному минимальному тормозным моментам, компараторы положительного и отрицательного сигналов производных момента 5 и 7, формирователи импульсов по переднему и заднему фронтам производной тормозного момента 6 и 8, -триггер нулевого состояния 9, генератор импульсов с логическим блоком 10, выходной каскад формирования...
Устройство дистанционного управления коробкой передач транспортного средства
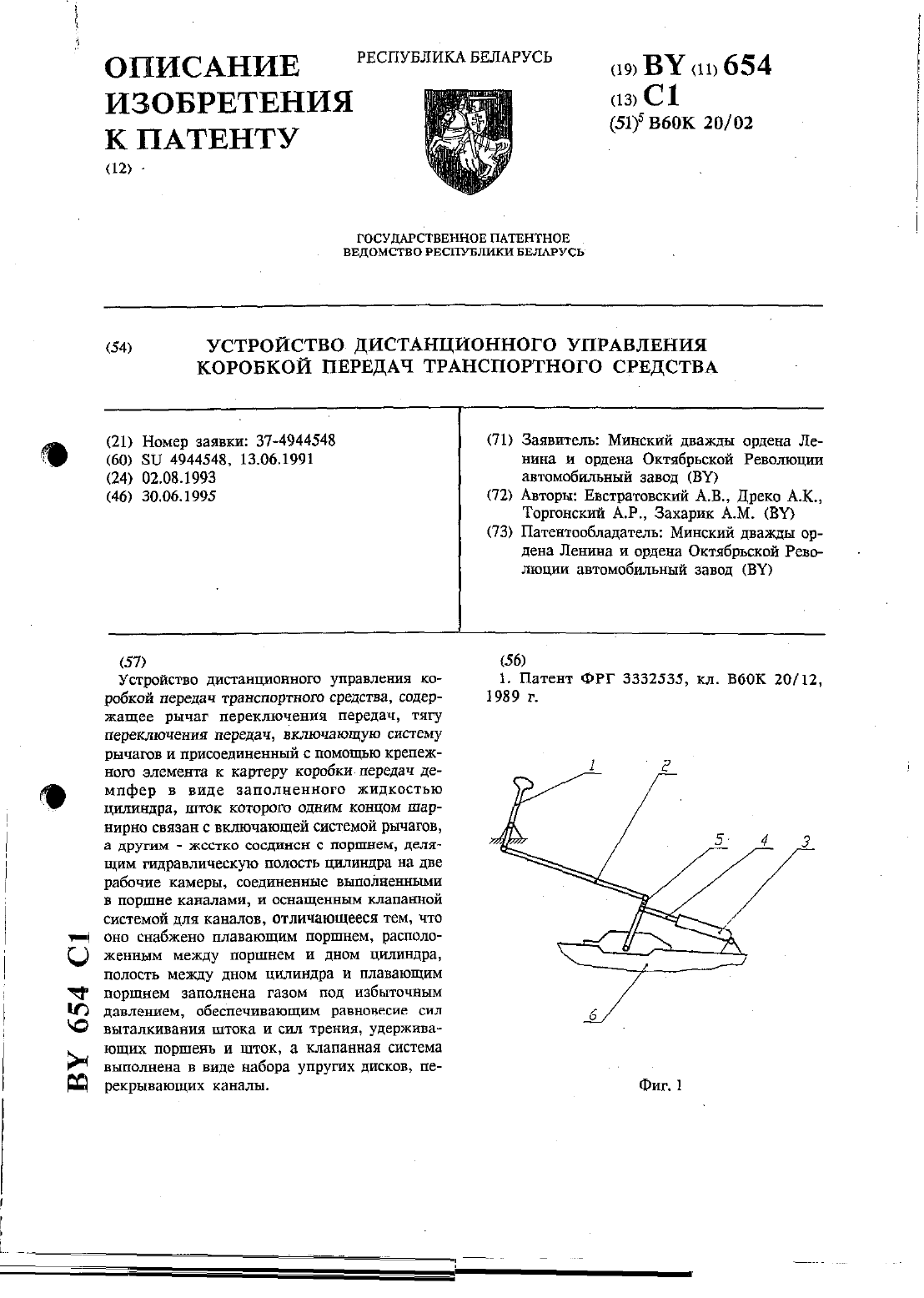
Номер патента: 654
Опубликовано: 30.06.1995
Авторы: Захарик А. М., Торгонский А. Р., Дреко А. К., Евстратовский А. В.
МПК: B60K 20/02
Метки: коробкой, устройство, транспортного, средства, передач, дистанционного, управления
Текст:
...присоединенный с помощью крепежного элемента к картеру коробки передач демпфер в виде заполненного жидкостью цилиндра, шток которого одним концом шарнирно связан с в ючающей системой рычагов, а ДРУГИМ - же тко соединен с поршнем, делящим гидравличе кую полость цилиндра на дне рабочие камеры соединенные выполненными в поршне канахми,и оснащенным клапанной системой для каналов, согласно изобретению, снабжено плавающим поршнем, расположенным...
Реверсивный пост управления транспортного средства
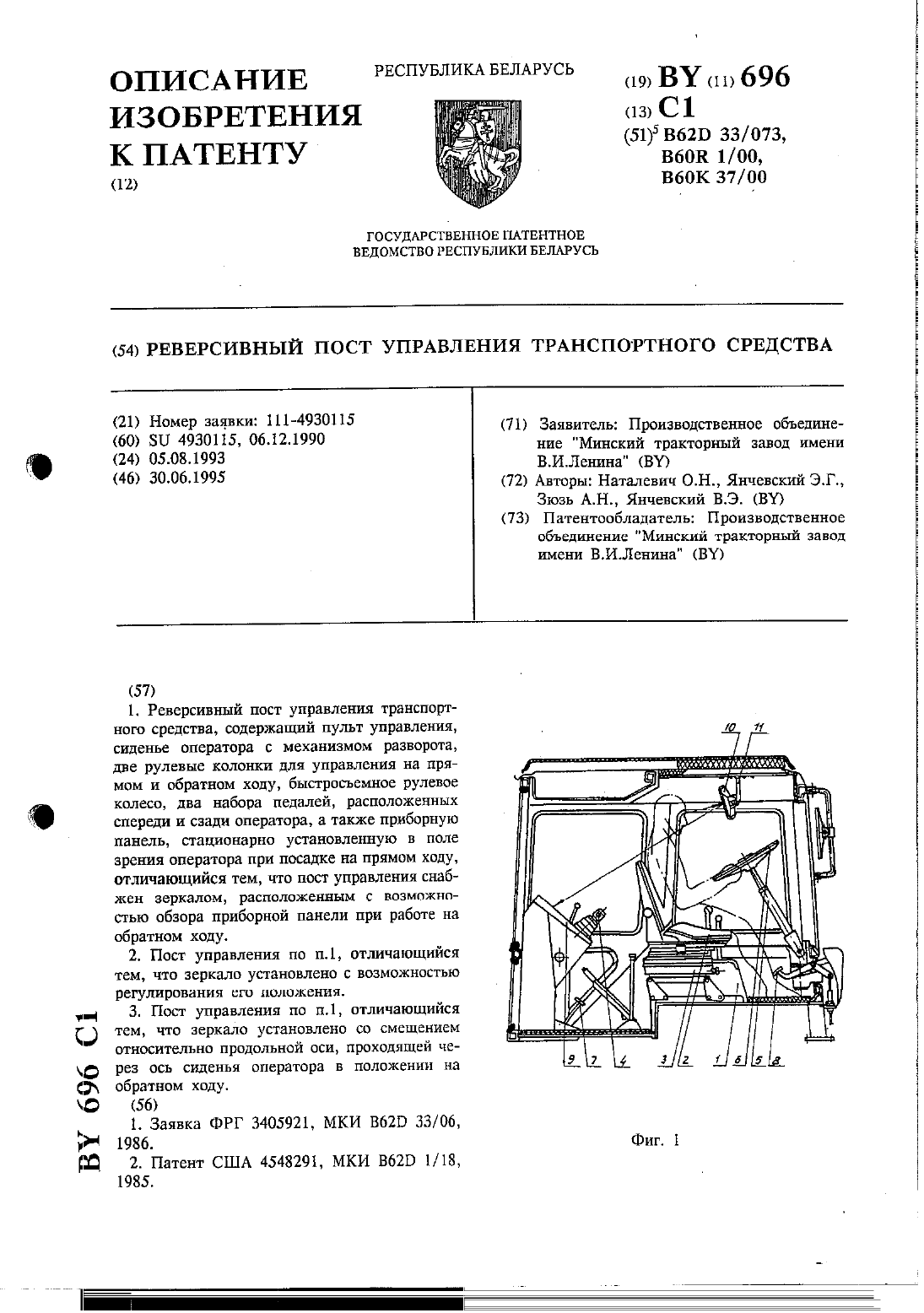
Номер патента: 696
Опубликовано: 30.06.1995
Авторы: Янчевский В. Э., Наталевич О. Н., Зюзь А. Н., Янчевский Э. Г.
МПК: B62D 33/073, B60K 37/00, B60R 1/00...
Метки: управления, транспортного, средства, реверсивный, пост
Текст:
...управления, обеспечивающего улучшение условий и безопасности труда,удобство управления транспортным средством при работе на обратном ходу при одновременном упрощении его конструкции.Поставленная задача решается тем, что реверсивный пост управления, содержащий пульт управления, сиденье оператора с механизмом разворота, две рулевые колонки для управления на прямом и обратном ходу, быстросьемное рулевое колесо, два набора педалей,...
Предыдущий патент: Пуля
Следующий патент: Способ изготовления арболита
Случайный патент: Состав для покрытия графитовых прессформ