Колесное транспортное средство
Номер патента: 15697
Опубликовано: 30.04.2012
Авторы: Бойков Владимир Петрович, Зелёный Пётр Васильевич, Щербакова Ольга Константиновна, Ермалёнок Валерий Генрихович, Яцкевич Владимир Владимирович
Текст
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский национальный технический университет(72) Авторы Зелный Птр Васильевич Бойков Владимир Петрович Яцкевич Владимир Владимирович Ермалнок Валерий Генрихович Щербакова Ольга Константиновна(73) Патентообладатель Белорусский национальный технический университет(57) Колесное транспортное средство, содержащее остов, задние ведущие колеса, кинематически связанные с двигателем, и передние направляющие ведущие колеса, снабженные межколесным дифференциальным механизмом, корпус которого установлен с возможностью вращения относительно остова и также кинематически связан с двигателем, при этом 15697 1 2012.04.30 дифференциальный механизм содержит две полуосевые конические шестерни, соосные оси вращения корпуса, и кинематически связывающие их конические шестернисателлиты, расположенные между ними радиально, фрикционные дисковые муфты для блокирования полуосевых конических шестерен с корпусом, причем полуосевые конические шестерни опираются во внешних осевых направлениях на корпус через диски фрикционной муфты, а в противоположных направлениях поджаты к шестерням-сателлитам упругими элементами, отличающееся тем, что полуосевые конические шестерни связаны с передними колесами посредством управляемых муфт и снабжены раздельными управляемыми тормозными механизмами для их блокирования с остовом управляемые тормозные механизмы и муфты выполнены дисковыми фрикционными, при этом один фрикционный диск каждой муфты закреплен на валу, связанном с передним колесом, а второй связан с полуосевой конической шестерней с возможностью осевого перемещения,фрикционные диски прижаты друг к другу упругими элементами и снабжены управляемым механизмом противодействия силе сжатия упругих элементов фрикционный диск каждого тормозного механизма установлен на остове с возможностью осевого перемещения и опирается в одном осевом направлении на полуосевую коническую шестерню, а в другом осевом направлении - на подвижный фрикционный диск муфты. Изобретение относится к полноприводным колесным транспортным средствам, преимущественно к тракторам. Известно колесное транспортное средство, в частности сельскохозяйственный трактор 1, содержащее двигатель, остов, несущую его колесную ходовую систему с задними ведущими колесами, снабженными приводом от двигателя через межколесный дифференциальный механизм, и передними направляющими колесами, обеспечивающими движение транспортного средства по заданному курсу, управляемыми водителем посредством рулевого механизма. Недостатками этого колесного транспортного средства является плохая (недостаточная) поворачиваемость и невысокие тяговые возможности, так как передние колеса не развивают тягового усилия ни на повороте, ни при прямолинейном движении, постоянно работая в ведомом режиме. Известно колесное транспортное средство 2 (прототип), содержащее остов, задние ведущие колеса, кинематически связанные с двигателем, и передние направляющие ведущие колеса, снабженные межколесным дифференциальным механизмом, корпус которого установлен с возможностью вращения относительно остова и также кинематически связан с двигателем, при этом дифференциальный механизм содержит две полуосевые конические шестерни, соосные оси вращения корпуса, и кинематически связывающие их конические шестерни-сателлиты, расположенные между ними радиально, фрикционные дисковые муфты для блокирования полуосевых конических шестерен с корпусом, причем полуосевые конические шестерни опираются во внешних осевых направлениях на корпус через диски фрикционной муфты, а в противоположных направлениях поджаты к шестерням-сателлитам упругими элементами. Недостатком этого колесного транспортного средства является недостаточная поворачиваемость, так как на повороте передние ведущие колеса, двигаясь по траектории большего радиуса, чем задние, находятся в режиме забегания и не создают тягового усилия в общем тяговом балансе трактора. Даже напротив, если их принудительно подключить к приводу, они станут противодействовать повороту из-за неизбежной на повороте циркуляции паразитной мощности между передними и задними колесами. В автоматическом же режиме подключения, осуществляемом, например, через муфту свободного хода, передние колеса, вынужденно забегая, просто отключаются от привода и не участвуют в обеспечении тягового усилия. В том и другом случае повороту со стороны передних колес 2 15697 1 2012.04.30 также препятствует так называемый бульдозерный эффект, вызванный боковыми реакциями опорной поверхности на колеса в повернутом положении. Задачей, решаемой данным изобретением, является улучшение поворачиваемости полноприводного транспортного средства путем принудительной активизации на повороте привода одного из колес переднего моста. Указанная задача решается тем, что в колесном транспортном средстве, содержащем остов, задние ведущие колеса, кинематически связанные с двигателем, и передние направляющие ведущие колеса, снабженные межколесным дифференциальным механизмом,корпус которого установлен с возможностью вращения относительно остова и также кинематически связан с двигателем, при этом дифференциальный механизм содержит две полуосевые конические шестерни, соосные оси вращения корпуса, и кинематически связывающие их конические шестерни-сателлиты, расположенные между ними радиально,фрикционные дисковые муфты для блокирования полуосевых конических шестерен с корпусом, причем полуосевые конические шестерни опираются во внешних осевых направлениях на корпус через диски фрикционной муфты, а в противоположных направлениях поджаты к шестерням-сателлитам упругими элементами, полуосевые конические шестерни связаны с передними колесами посредством управляемых муфт и снабжены раздельными управляемыми тормозными механизмами для их блокирования с остовом управляемые тормозные механизмы и муфты выполнены дисковыми фрикционными, при этом один фрикционный диск каждой муфты закреплен на валу, связанном с передним колесом, а второй связан с полуосевой конической шестерней с возможностью осевого перемещения, фрикционные диски прижаты друг к другу упругими элементами и снабжены управляемым механизмом противодействия силе сжатия упругих элементов фрикционный диск каждого тормозного механизма установлен на остове с возможностью осевого перемещения и опирается в одном осевом направлении на полуосевую коническую шестерню, а в другом осевом направлении - на подвижный фрикционный диск муфты. Перечисленная совокупность существенных признаков позволяет получить следующий технический результат. При прямолинейном движении для обеспечения высоких тяговых возможностей привод от двигателя передается не только на задние ведущие колеса(колеса заднего моста), но и на передние (колеса переднего моста, подключаемого посредством специального механизма принудительно или автоматически, если он содержит муфту свободного хода - обгонную муфту). Для подключения в автоматическом режиме буксование колес заднего моста должно достигнуть определенной величины - около 7 . Именно такое кинематическое рассогласование (несоответствие) в качении между колесами переднего и заднего мостов конструктивно заложено, например, в современных сельскохозяйственных тракторах. Однако на повороте колеса переднего моста катятся по значительно большему радиусу, чем задние, и это несоответствие в скоростях их вращения еще больше существенно увеличивается (чтобы успевать, колеса переднего моста, толкаемые остовом трактора, вынуждены вращаться быстрее привод их вращения от двигателя так и не вступает в действие он их попросту не может догнать). Будучи отключенными от привода двигателем,передние колеса не способствуют повороту трактора, снижают его тяговые возможности из-за появления бульдозерного эффекта в повернутом на большой угол положении. Принудительное же подключение привода колес переднего моста к двигателю еще больше усугубляет ситуацию, так как в описанных условиях движения оно привело бы к большой циркуляции мощности между мостами из-за значительного изменения требуемых линейных скоростей их колес на повороте, что не позволяет осуществить жесткая кинематическая связь между мостами (эта связь не дифференциальная дифференциальная не приемлема для тракторов как тягового средства, так как снижает тяговые возможности трактора во внедорожных условиях с различными сцепными условиями под колесами). В результате теряется тяга и даже управляемость трактора. 3 15697 1 2012.04.30 Избежать этого позволяет принудительное увеличение скорости вращения на повороте хотя бы одного колеса переднего моста. В повернутом положении это колесо будет способствовать эффективному повороту транспортного средства, так как будет тянуть его в направлении поворота. Вдвое увеличить скорость вращения одного из колес переднего моста позволяет то свойство дифференциального межколесного механизма, в соответствии с которым при остановленной одной из полуосевых шестерен вторая вращается в два раза быстрее. Признаки, обеспечивающее это, заключаются в том, что каждая полуосевая шестерня дифференциального механизма переднего моста снабжена управляемым тормозом для ее остановки на повороте, а каждое его колесо связано с полуосевой шестерней через управляемую муфту для отключения колеса от остановленной полуосевой шестерни. Другими признаками обеспечивается то, чтобы при остановленной полуосевой шестерне фрикционный механизм ее блокирования с вращающимся корпусом дифференциального механизма отключался и не препятствовал вращению во избежание ненужных затрат энергии. Для упрощения управления описанным процессом, когда одно из колес переднего моста надо отключить от привода, а связанную с ним полуосевую шестерню остановить, в конструкции предусмотрены признаки, обеспечивающие это от одного управляющего воздействия. Четкость работы предлагаемой конструкции будет обеспечена, если в указанных муфтах и тормозах будут использоваться дисковые фрикционные механизмы с гидравлическим управлением. Возможность реализации предлагаемого технического решения проиллюстрирована на фиг. 1 приведена кинематическая схема полного привода колес транспортного средства на фиг. 2 приведен вариант кинематической схемы привода передних колес на фиг. 3 приведена схема сил реакции опорной поверхности в плане, обеспечивающих прямолинейное движение транспортного средства фиг. 4, 5 и 6 также иллюстрируют схему сил,действующих на транспортное средство, но на повороте при отключенном приводе колес переднего моста двигателем, что имеет место у прототипа, и при принудительном включении его левого и правого колес согласно изобретению соответственно. Колесное транспортное средство содержит остов 1, двигатель 2, основной задний 3 и подключаемый передний 4 ведущие мосты с межколесными зубчатыми дифференциальными механизмами 5 и 6, помещенными в отдельные корпуса 7 и 8, являющиеся передней и задней составными частями остова 1. Привод дифференциальных механизмов 5 и 6 от двигателя 2 состоит из фрикционной управляемой муфты 9 (главного сцепления) для кратковременного отключения двигателя 2 при изменении скорости движения посредством коробки перемены передач, самой коробки перемены передач 10, шестерен 11 и 12,образующих раздаточную коробку, продольного вала 13, механизма 14 (изображен стрелкой) подключения переднего моста к приводу на основе фрикционной дисковой муфты. Ее ведущая часть 15 кинематически связана с основными задними ведущими колесами 16 и 17, входящими в состав заднего ведущего моста 3, и двигателем 2, а ведомая часть 18 - с передними направляющими колесами 19 и 20, входящими в состав переднего подключаемого ведущего моста 4. Механизм 14 снабжен трехрежимным управлением своей фрикционной муфты обеспечивает принудительное отключение привода колес 19 и 20 переднего моста 3 от двигателя 2 и их принудительное включение в ведущий режим движения автоматическое включение по принципу муфты свободного хода (обгонной муфты), обеспечивающее включение фрикционной муфты, как только скорости вращения ведущей и ведомой частей этой муфты сравняются. Для этого необходимо, чтобы буксование основных ведущих колес 16 и 17 основного постоянно включенного заднего моста 3 под тяговой нагрузкой увеличилось до определенного значения - приблизительно до 7 . Именно такое кинематическое рассогласование закладывают в конструкцию большинства тракторов сельскохозяйственного назначения, по достижении которого автоматически вступает в тяговый режим движения передний подключаемый мост 4. Если буксование колес 16 и 17 заднего моста 3 вновь станет меньше заложенного в кинематику привода значения, ко 4 15697 1 2012.04.30 леса 19 и 20 переднего моста 4, толкаемого остовом 1, перейдут в ведомый режим движения - режим забегания, и связанная с ними ведомая часть 18 дисковой фрикционной муфты механизма подключения 14 станет вращаться быстрее, чем ее ведущая часть 15,кинематически связанная с колесами 16 и 17 заднего моста. Это обеспечит отключение колес 19 и 20 переднего моста 4 от принудительного привода их во вращение двигателем 2. Направляющие колеса 19 и 20 переднего моста 4 являются управляемыми, и благодаря этому посредством их направляют движение транспортного средства. Оно может быть прямолинейным (фиг. 3) или по дуге окружности. В последнем случае колеса 19 и 20 должны поворачиваться на разные углы, как это следует из кинематики поворота (фиг. 4). Внутреннее (по отношению к центру поворота) колесо 19 поворачивают на больший угол. Такой поворот на разные углы обеспечивается кинематической связью колес между собой посредством регулируемой тяги 21 и рычагов 22 и 23, образующих так называемую рулевую трапецию. Передняя часть остова 1 - корпус 8 переднего моста 4 - представляет собой продолговатую полую конструкцию, называемую в тракторостроении поперечной балкой, которая связана с остальной частью остова 1 трактора с возможностью свободного ограниченного поворота на шарнире 24 в поперечной вертикальной плоскости, то есть с возможностью качания для копирования колесами неровностей опорной поверхности. Передние колеса крепятся к ее концам с возможностью поворота в плоскости движения транспортного средства (в плане) посредством шарниров 25 и 26. Управляемый поворот колес и их удержание в нужном положении обеспечиваются силовым гидравлическим цилиндром 27 через рычаг 28. Дифференциальный зубчатый механизм 6 переднего ведущего моста 4 содержит корпус 29, установленный в корпусе 8 переднего моста - передней части остова 1 - с возможностью вращения. Внутри корпуса 29 установлены с возможностью вращения полуосевые конические шестерни 30 и 31, кинематически связанные между собой радиально расположенными шестернями-сателлитами 32 (изображен один, но вообще их несколько - четыре,равномерно расположенные по окружности). Дифференциальный механизм 6 колес 19 и 20 переднего моста 4 содержит фрикционные дисковые муфты 33 и 34 для блокирования его полуосевых конических шестерен 30 и 31 с корпусом 29 этого механизма, установленным в корпусе 8 переднего моста - передней части остова 1 - с возможностью вращения и кинематически связанным с приводом посредством механизма подключения 14, причем полуосевые шестерни 30 и 31 опираются в осевом направлении на диски фрикционных муфт 33 и 34 для их сжатия усилием зацепления полуосевых шестерен 30 и 31 со связывающими их друг с другом шестернямисателлитами 32, а в противоположном направлении полуосевые шестерни поджимаются к радиально расположенным между ними шестерням-сателлитам 32 упругими элементами 35 и 36, противодействующими указанным усилиям зацепления. Полуосевые шестерни 30 и 31 кинематически связаны с колесами переднего моста 4 посредством управляемых муфт 37 и 38 и снабжены раздельными управляемыми тормозными механизмами 39 и 40 для их блокирования с корпусом 8 переднего моста - передней частью остова 1. Управляемые тормозные механизмы и муфты выполнены дисковыми фрикционными,при этом один фрикционный диск 41 или 42 каждой муфты закреплен на валу 43 или 44,связанном с колесом 19 или 20, а второй 45 или 46 - связан с полуосевой шестерней 30 или 31 посредством валов 47 и 48 с возможностью осевого перемещения (на шлицах). Диски 41 и 42, 45 и 46 попарно прижаты друг к другу упругими элементами 49 и 50 и снабжены управляемыми механизмами 51 и 52 (изображены условно стрелками) противодействия силе сжатия упругих элементов. Фрикционные диски 53 и 54 каждого тормозного механизма 39 и 40 установлены в корпусе 8 переднего моста 4 - передней части остова 1 - так 5 15697 1 2012.04.30 же с возможностью осевого перемещения (на шлицах) и опираются на полуосевые шестерни 30 и 31 в одном осевом направлении (внутрь навстречу друг другу), а на подвижные фрикционные диски 41 и 42 муфт 37 и 38 - в противоположном указанному осевом направлении (во внешние стороны). Таким образом, управление каждым тормозным механизмом 39 и 40 объединено с управлением муфтами 37 и 38 в противофазе, что заключается в следующем. При отключении подвода крутящего момента к одному из колес 19 или 20 переднего моста посредством муфты 37 или 38 одновременно включается соответствующий тормоз 39 или 40,который блокирует от вращения одну из полуосевых шестерен 30 или 31 дифференциального механизма 6 согласно данному изобретению. Дополнительного управляющего воздействия при этом не требуется. Более того, предложенное конструктивное решение позволяет разблокировать остановленную полуосевую шестерню с вращающимся корпусом 29 дифференциального механизма 6 во избежание ненужных потерь энергии на трение благодаря тому, что усилие прижатия к тормозным дискам 53 и 54 дисков 45 и 46 муфт воспринимается полуосевыми шестернями 30 и 31 в направлении, противоположном силам зацепления их с шестернями-сателлитами 32, обеспечивающими блокирование дифференциала пропорционально передаваемому крутящему моменту. Подвод крутящего момента от механизма подключения 14 к корпусу 29 дифференциального механизма 6 осуществляется посредством телескопического карданного вала 55,ведущей 56 и ведомой 57 конических шестерен, образующих центральную передачу переднего моста. Привод дифференциального механизма 5 основного заднего моста 3 состоит из ведущей 58 и ведомой 59 конических шестерен, образующих главную центральную передачу. Ведущая шестерня 58 установлена на выходном валу 60 коробки перемены передач 10, а ведомая шестерня 59 - на вращающемся корпусе 61 дифференциального механизма. Внутри этого корпуса установлены две полуосевые конические шестерни 62 и 63, соосные геометрической оси вращения самого корпуса 61, и находящиеся с ними в зацеплении конические шестерни-сателлиты 64, которые расположены на равном удалении друг от друга (по количеству их может быть три или четыре). Указанные шестерни и вращающийся корпус образуют дифференциальный зубчатый механизм 5, предназначенный для деления крутящего момента поровну между левым 16 и правым 17 колесами заднего ведущего моста 3. Чтобы полностью или частично лишить дифференциальный механизм этого свойства,для повышения тяговых качеств транспортного средства в корпусе 61 установлена гидравлически управляемая дисковая фрикционная муфта 65, которая при необходимости позволяет блокировать полностью правую полуосевую шестерню 63 с корпусом 61, заставив вращаться совместно их, вторую полуосевую шестерню 62 и шестерни-сателлиты 64 как единое целое, или обеспечивать их относительное проворачивание по достижении определенного регулируемого по величине муфтой 65 крутящего момента - момента блокирования дифференциального механизма. Полуосевые шестерни 62 и 63 связаны полуосями 66 и 67 с бортовыми планетарными зубчатыми механизмами 68 и 69, обеспечивающими передачу крутящего момента, многократно увеличенного, непосредственно задним ведущим колесным движителям 15 и 16. Бортовые зубчатые механизмы состоят из солнечных цилиндрических шестерен 70 и 71, непосредственно связанных с полуосями 66 и 67, находящихся с ними в зацеплении сдвоенных зубчатых шестерен-сателлитов 72 и 73, посаженных на водила 74 и 75, и коренных цилиндрических шестерен 76 и 77, также находящихся в зацеплении с шестеренями-сателитами 72 и 73 соответственно. Водила 74 и 75, несущие шестерни-сателлиты 72 и 73, установлены на полуосях 78 и 79 колес 16 и 17 заднего ведущего моста 3. Раздельное торможение колес обеспечивается фрикционными дисковыми гидравлически управляемыми тормозами 80 и 81, блокирующими при необходимости полуоси 66 и 6 15697 1 2012.04.30 67 с остовом 1 трактора и тем самым останавливающими передачу вращения на колесные движители - на один из них или оба сразу. На схемах изображены также шарниры 82 и 83 для передачи крутящего момента на колеса 19 и 20 переднего моста в их любом угловом положении. Этими шарнирами могут быть кардановы шарниры или шарниры равных угловых скоростей. Отличие схемы на фиг. 2 от схемы на фиг. 1 заключается только лишь в том, что диски 53 и 54 тормозных механизмов 39 и 40 опираются на полуосевые конические шестерни 30 и 31 непосредственно, а не через валы 47 и 48. Принципиально это ничего не меняет,но может иметь значение при конструктивной реализации предложенных признаков изобретения. Работает устройство следующим образом. При прямолинейном движении транспортного средства крутящий момент от двигателя 2 через фрикционную муфту 9, коробку перемены передач 10, ее выходной вал 60, конические шестерни 58 и 59 главной центральной передачи передается на корпус 61 зубчатого дифференциального механизма заднего моста 3. Вращаясь, корпус увлекает с собой шестерни-сателлиты 64, а через них вращает в том же направлении и с той же скоростью полуосевые шестерни 62 и 63. Далее вращение передается на колеса 16 и 17 заднего ведущего моста 3 через бортовые планетарные зубчатые механизмы 68 и 69,существенно увеличивающие подводимые к ним крутящие моменты для того, чтобы колеса могли развивать большие тяговые усилия. Скорость движения транспортного средства регулируют коробкой перемены передач 10 в момент кратковременного ее отключения посредством фрикционной муфты 9 от двигателя 2. Еще большее тяговое усилие транспортное средство сможет развить, если крутящий момент будет передаваться и на передний ведущий мост 4. Для подключения переднего ведущего моста 4 служит механизм 14, который, смыкая фрикционные диски 15 и 18, передаст вращение от продольного вала 13, вращаемого выходным валом 60 через цилиндрические шестерни 11 и 12, на карданный вал 55 и далее посредством конических шестерен 56 и 57 центральной передачи переднего моста 4 на корпус 29 его зубчатого дифференциального механизма 6. Корпус 29 вовлекает во вращательное движение через шестерни-сателлиты 32 полуосевые шестерни 30 и 31 в том же направлении с той же скоростью. Далее вращение передается на ведущие колеса 19 и 20 переднего моста 4 посредством валов 47 и 48, 43 и 44,соединенных попарно муфтами 37 и 38, постоянно замкнутыми посредством упругих элементов 49 и 50. Тормозные механизмы 39 и 40 при этом отключены и не препятствуют вращению. Таким образом, все колеса транспортного средства работают в ведущем режиме и обеспечивают каждое определенную силу тяги пл, пп, зл и зп согласно фиг. 3, идущую на создание полезного (за вычетом сил на самопередвижение) тягового (крюкового) усилия кр. Если одно из колес или два колеса одного борта попадают в плохие сцепные условия, то сила тяги остальных колес не снижается, несмотря на то, что межколесные связи являются дифференциальными. Это в пределах коэффициентов блокирования обеспечивается блокировочными механизмами 65, 33 и 34 на основе дисковых фрикционных муфт. При этом момент блокирования задних колес 16 и 17 может быть задан любым, так как фрикционная муфта 65 является гидравлически управляемой, а момент блокирования передних колес 19 и 20 тем больше, чем больший крутящий момент к ним подводится, так как дифференциальный механизм 6 является самоблокирующимся. Это свойство обеспечивается тем, что его блокировочные фрикционные диски 33 и 34 сжимаются усилием,развиваемым в зацеплении полуосевых шестерен 30 и 31 с шестернями-сателлитами 32. В обратном направлении действуют силы упругости пружин 35 и 36, разжимающие диски,если крутящий момент дифференциальным механизмом 6 не передается. В этом случае дифференциал 6 работает как простой, позволяя колесам 19 и 20 вращаться свободно. 7 15697 1 2012.04.30 Вышеописанное подключение переднего ведущего моста 4 в тяговый режим может осуществляться или принудительно механизмом 14, или в автоматическом режиме, когда буксование колес 16 и 17 заднего моста 3 достигнет определенной величины, например 7 , заложенной конструктивно (по принципу муфты свободного хода). На повороте (фиг. 4) передние колеса 19 и 20 должны совершать движение по гораздо большему радиусу, чем задние 16 и 17, и станут вращаться быстрее. В этом случае в автоматическом режиме их подключение не возможно, так как буксование задних колес должно было бы стать недопустимо большим, связанным с образованием глубокой колеи,чрезмерным истиранием почвы и т.п. Передний мост на повороте переходит в ведомый режим. Тяговые усилия зл и зп, развиваемые колесами 16 и 17 заднего моста 3, при этом должны затрачиваться не только на создание полезной силы тяги кр, но и на преодоление сопротивления качению передних колес 19 и 20, а также на создание боковых реакций грунта пл и пп, обеспечивающих поворот транспортного средства. В результате кр не достигает максимального значения, а поворот будет осуществляться с большим радиусом из-за неизбежного значительного бокового проскальзывания и увода шин колес 19 и 20 переднего моста 4 в ведомом режиме движения (на фиг. 4 изображен максимальный радиус пов качения наиболее удаленного от центра поворота колеса 20 транспортного средства, определяющий величину коридора поворота). Если же на повороте передний мост 4 подключить посредством механизма 14 принудительно, то такое движение будет сопряжено со значительными потерями на циркуляцию паразитной мощности между ним и задним мостом 3. Колеса 19 и 20 переднего моста будут сами стремиться вращаться быстрее, так как им необходимо пройти больший путь,как это пояснено выше, а задние 16 и 17, кинематически принудительно связанные с ними, будут препятствовать этому. Такой поворот недопустим, не используется и не дает ничего полезного с точки зрения поставленной задачи. Передние колеса не только не будут способствовать повороту, а напротив - станут сопротивляться ему. Принудительное подключение переднего моста применяют при заднем ходе или при тяжелой тяговой нагрузке, но не на повороте. Таким образом, как было показано, движение на повороте транспортного средствапрототипа обеспечивается только задним ведущим мостом 3, и поворот обеспечивается только за счет боковых реакций пл и пп опорной поверхности, действующих в повернутом положении колес 19 и 20 переднего моста. Но ввиду неизбежных при этом бокового скольжения и увода шин этих колес действительная траектория поворота имеет больший радиус, чем теоретический пов, изображенный на фиг. 4. Для улучшения поворачиваемости транспортного средства необходимо, чтобы на повороте передний мост 4 оставался в ведущем режиме, создавал силу тяги и не являлся причиной циркуляции мощности между ним и задним мостом 4. Предложенное техническое решение позволяет обеспечить при совершении поворота работу в тяговом режиме одного из ведущих колес 19 или 20 переднего моста 4, если при этом второе его колесо, соответственно, 20 или 19 будет посредством муфты 38 или 37 отключено от привода, получив свободу независимого вращения, а полуосевая шестерня со стороны этого колеса, то есть 31 или 30, будет заблокирована от вращения тормозным механизмом 40 или 39 соответственно. Благодаря этому сателлиты 32 будут обегать неподвижную полуосевую шестерню, придут во вращение и будут дополнительно вращать вторую полуосевую шестерню, удвоив скорость ее вращения. Колесо переднего моста 4,связанное с этой полуосевой шестерней, также станет вращаться в два раза быстрее и тянуть за собой передний мост в направлении поворота посредством появившейся силы тяги пл или пп, как это представлено на фиг. 5 и 6. Второе, отключенное от привода колесо при этом будет способствовать повороту благодаря боковой реакции на него пл или пп опорной поверхности. 15697 1 2012.04.30 Удвоение скорости вращения одного из передних колес 19 или 20 на повороте будет способствовать увеличению его буксования и развиваемой колесом силы тяги, которая,как известно, пропорциональна буксованию, что положительно скажется на улучшении поворачиваемости транспортного средства. Если оставлять в ведущем режиме на повороте внешнее колесо 20 переднего моста 4(фиг. 6), то буксование колеса будет меньше, так как оно катится по большему радиусу и должно пройти больший путь. Если в ведущем режиме будет внутреннее колесо 19 (фиг. 5), буксование будет больше, так как проходимый им путь соизмерим с путем середины заднего моста 3 - средним путем, проходимым его колесами 16 и 17. Источники информации 1. Анилович В.Я., Водолажченко Ю.Т. Конструирование и расчет сельскохозяйственных тракторов. Справочное пособие. Изд. 2-е, переработ. и доп. - М. Машиностроение,1976. - С. 73-77, 99, 111-115, 289-301. 2. Ксеневич И.П. Тракторы МТЗ-100 и МТЗ-102. - М. Агропромиздат, 1986. - С. 55-96 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 10
МПК / Метки
МПК: B60K 17/346, F16H 48/22
Метки: транспортное, колесное, средство
Код ссылки
<a href="https://by.patents.su/10-15697-kolesnoe-transportnoe-sredstvo.html" rel="bookmark" title="База патентов Беларуси">Колесное транспортное средство</a>
Колесное транспортное средство
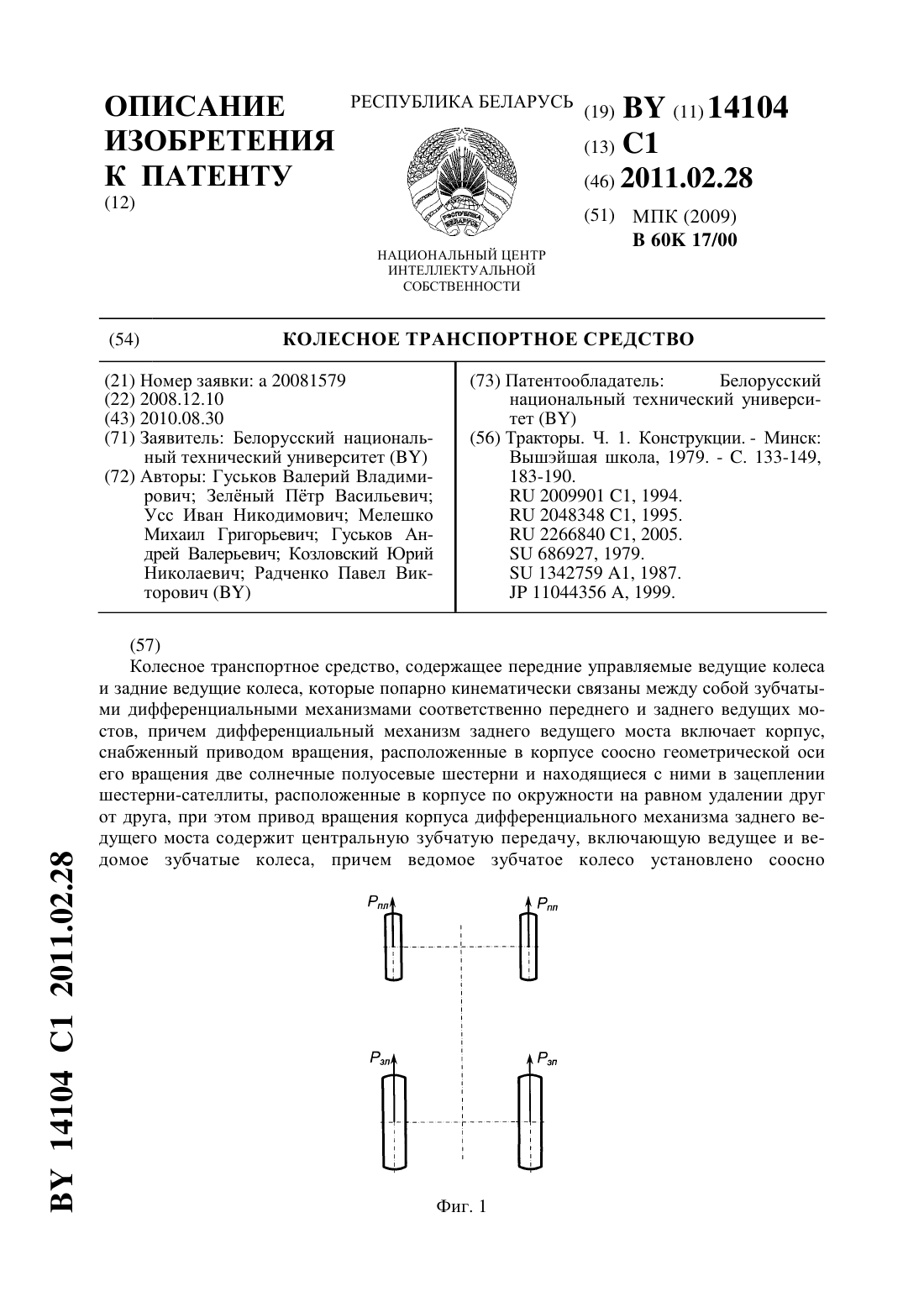
Номер патента: 14104
Опубликовано: 28.02.2011
Авторы: Усс Иван Никодимович, Мелешко Михаил Григорьевич, Гуськов Андрей Валерьевич, Радченко Павел Викторович, Гуськов Валерий Владимирович, Зелёный Пётр Васильевич, Козловский Юрий Николаевич
МПК: B60K 17/00
Метки: средство, транспортное, колесное
Текст:
...передние управляемые ведущие колеса 1 и 2, а также задние ведущие колеса 3 и 4. И те, и другие попарно кинематически связаны между собой зубчатыми дифференциальными механизмами, являющимися основными элементами привода соответственно переднего и заднего ведущих мостов транспортного средства. Дифференциальный механизм заднего ведущего моста состоит из вращающегося корпуса 5, снабженного приводом вращения,расположенных в корпусе соосно...
Колесное транспортное средство
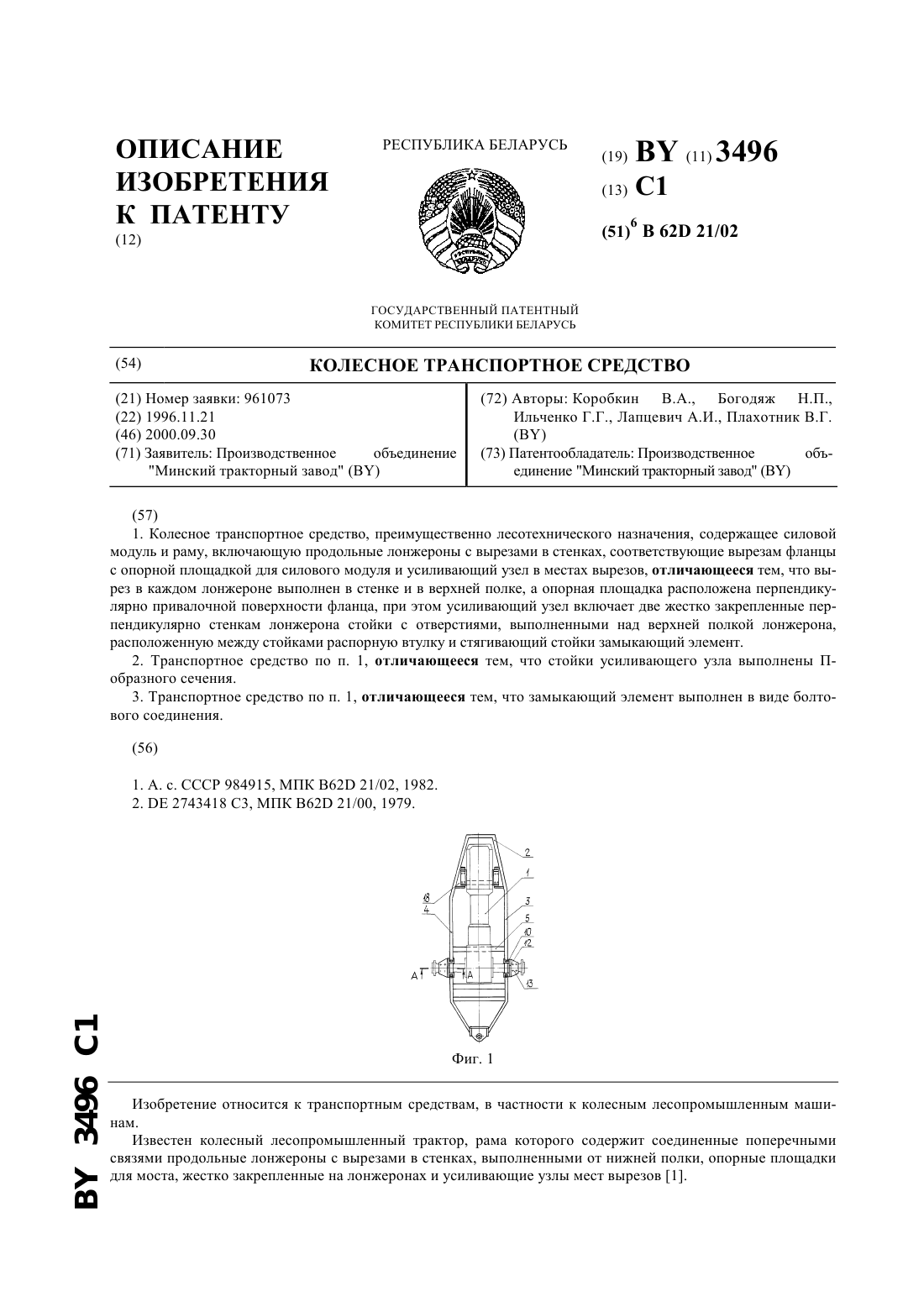
Номер патента: 3496
Опубликовано: 30.09.2000
Авторы: Богодяж Николай Павлович, Плахотник Василий Григорьевич, Лапцевич Александр Иванович, Коробкин Владимир Андреевич, Ильченко Георгий Георгиевич
МПК: B62D 21/02
Метки: средство, транспортное, колесное
Текст:
...задачи осуществляется выполнением рамы, содержащей продольные лонжероны с вырезами в стенках и в верхних полках, соответствующие вырезам в лонжеронах фланцы с опорной площадкой, расположенной перпендикулярно привалочной поверхности, и усиливающий узел, включающий две вертикальные стойки, жестко закрепленные к лонжерону перпендикулярно стенкам, с отверстиями, выполненными над верхней полкой лонжерона, распорную втулку, размещенную между...
Сочлененное транспортное средство
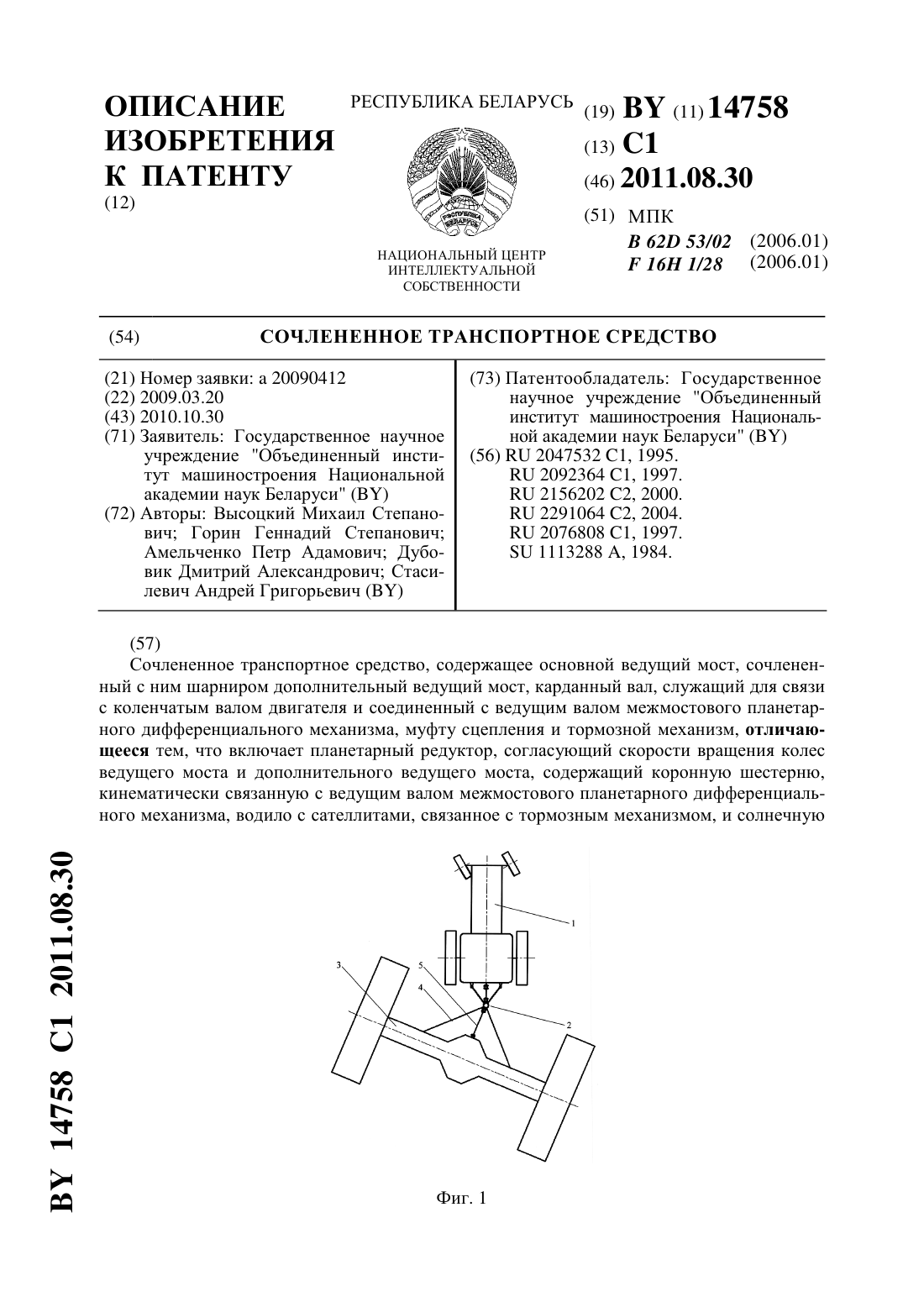
Номер патента: 14758
Опубликовано: 30.08.2011
Авторы: Стасилевич Андрей Григорьевич, Дубовик Дмитрий Александрович, Горин Геннадий Степанович, Высоцкий Михаил Степанович, Амельченко Петр Адамович
МПК: B62D 53/02, F16H 1/28
Метки: средство, сочлененное, транспортное
Текст:
...мост не передается. Изобретение поясняется фигурами. На фиг. 1 показано сочлененное транспортное средство. На фиг. 2 показана кинематическая схема привода дополнительного моста. Сочлененное транспортное средство включает тягач 1 с основным ведущим мостом(не показан) и сочлененный с ним с помощью шарнира 2 дополнительный ведущий мост 3 с тягами 4. Крутящий момент от коленчатого вала двигателя (не показан) передается с помощью карданного...
Транспортное средство с приводом мускульной силой человека
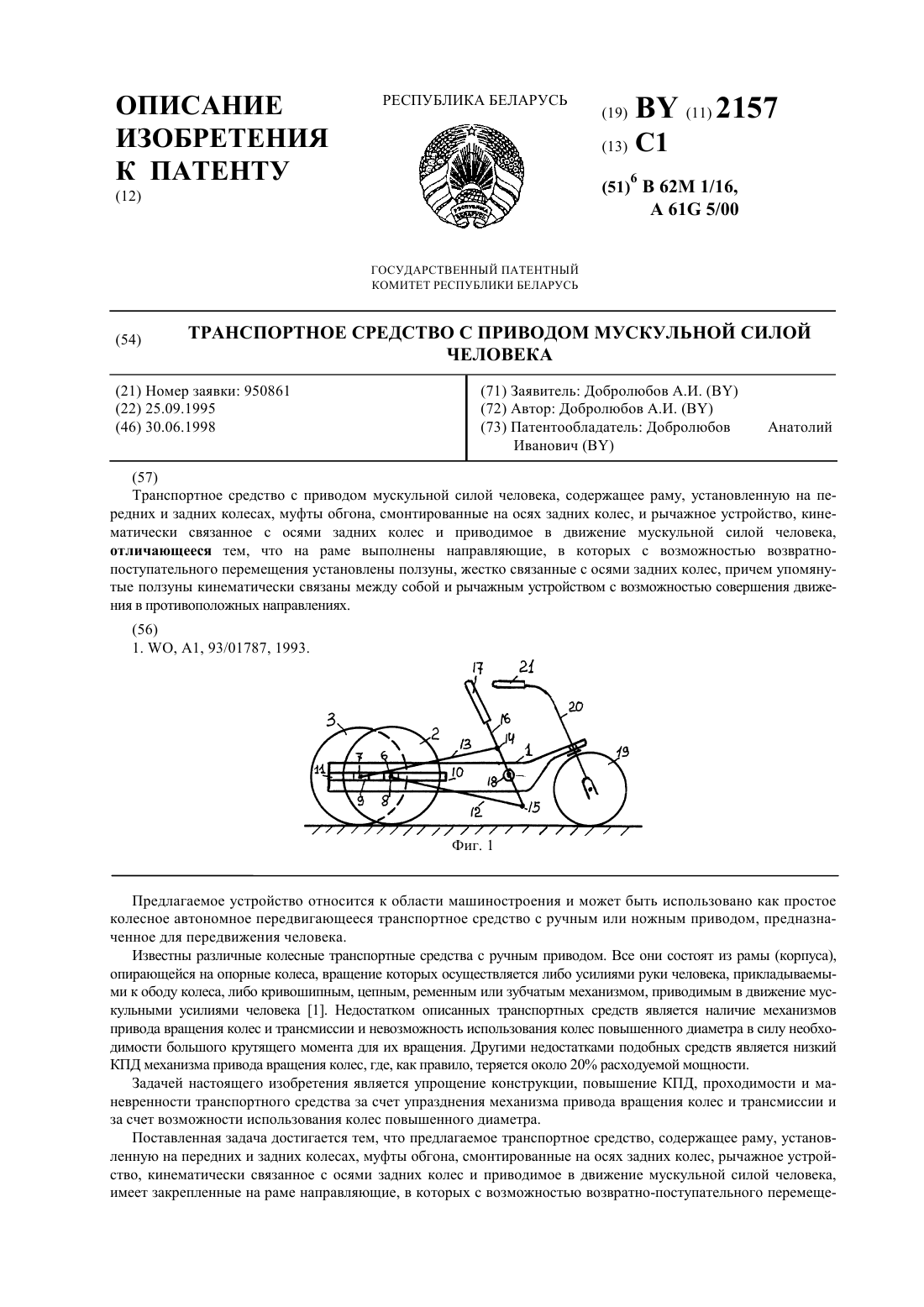
Номер патента: 2157
Опубликовано: 30.06.1998
Автор: Добролюбов Анатолий Иванович
Метки: средство, человека, мускульной, транспортное, силой, приводом
Текст:
...фиг. 1 и 2 изображена схема предлагаемого транспортного средства, на фиг. 3 изображен вариант схемы с ножным приводом. Транспортное средство (фиг. 1) содержит раму 1, опирающуюся на опорные колеса 2 и 3, снабженные стандартными муфтами обгона 4 и 5. Оси 6 и 7 вращения колес смонтированы на ползунах 8 и 9, способных совершать возвратно-поступательные движения в направляющих 10 и 11, смонтированных на раме 1. Ползуны 8 и 9 шарнирно соединены с...
Транспортное средство
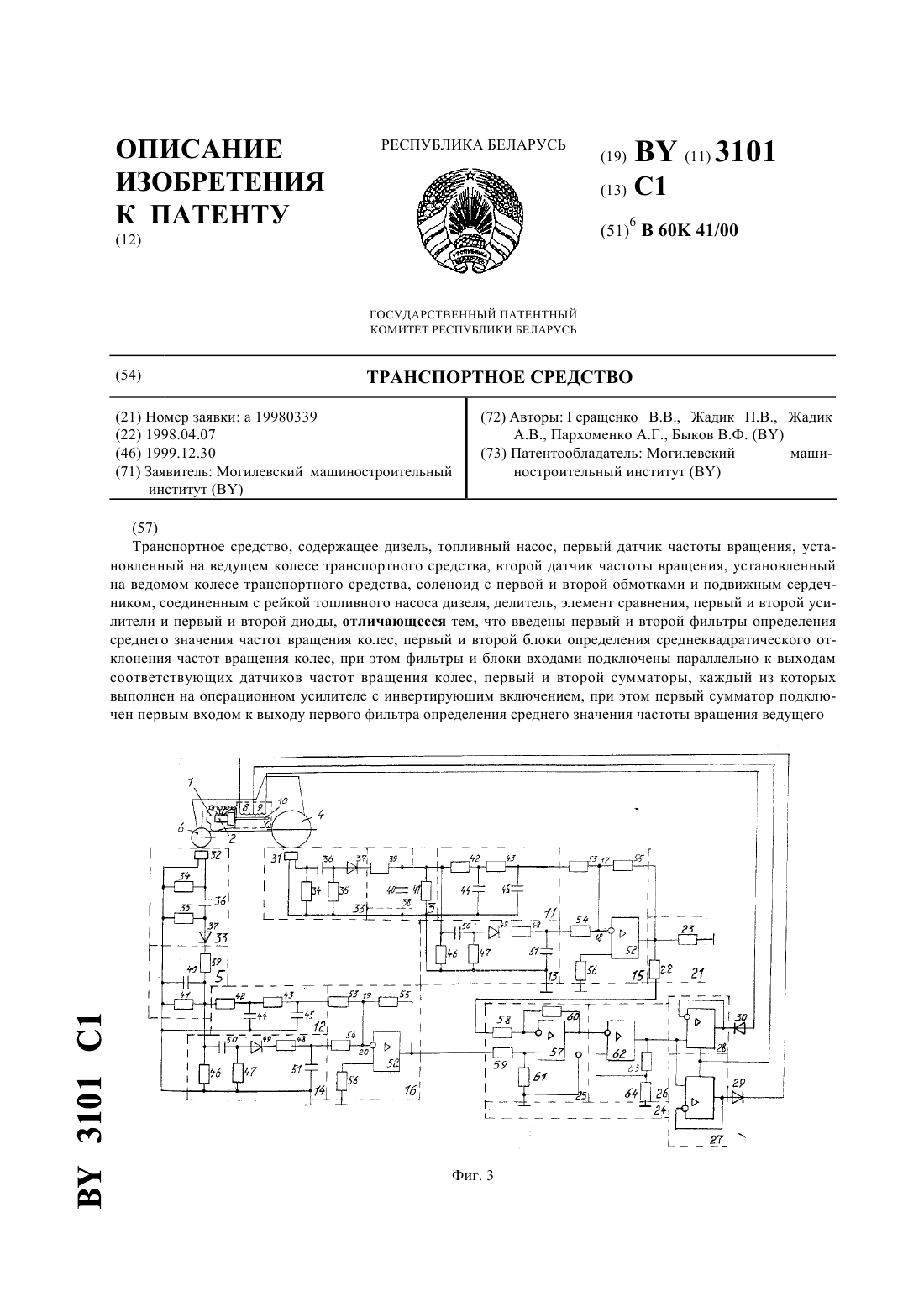
Номер патента: 3101
Опубликовано: 30.12.1999
Авторы: Жадик Павел Васильевич, Жадик Александр Васильевич, Быков Василий Филиппович, Пархоменко Александр Георгиевич, Геращенко Василий Васильевич
МПК: B60K 41/00
Метки: транспортное, средство
Текст:
...второй сумматоры, каждый из которых выполнен на операционном усилителе с инвертирующим включением, при этом первый сумматор подключен первым входом к выходу первого фильтра определения среднего значения частоты вращения ведущего колеса, вторым входом - к выходу первого блока определения среднеквадратического отклонения частоты вращения ведущего колеса, второй сумматор подключен первым входом к выходу второго фильтра определения среднего...
Предыдущий патент: Животноводческое помещение
Следующий патент: Способ диагностики функционального состояния водителя, управляющего автотранспортным средством, для предупреждения нештатных ситуаций
Случайный патент: Фюзеляж самолета