Колесное транспортное средство
Номер патента: 14104
Опубликовано: 28.02.2011
Авторы: Радченко Павел Викторович, Гуськов Андрей Валерьевич, Гуськов Валерий Владимирович, Зелёный Пётр Васильевич, Усс Иван Никодимович, Мелешко Михаил Григорьевич, Козловский Юрий Николаевич
Текст
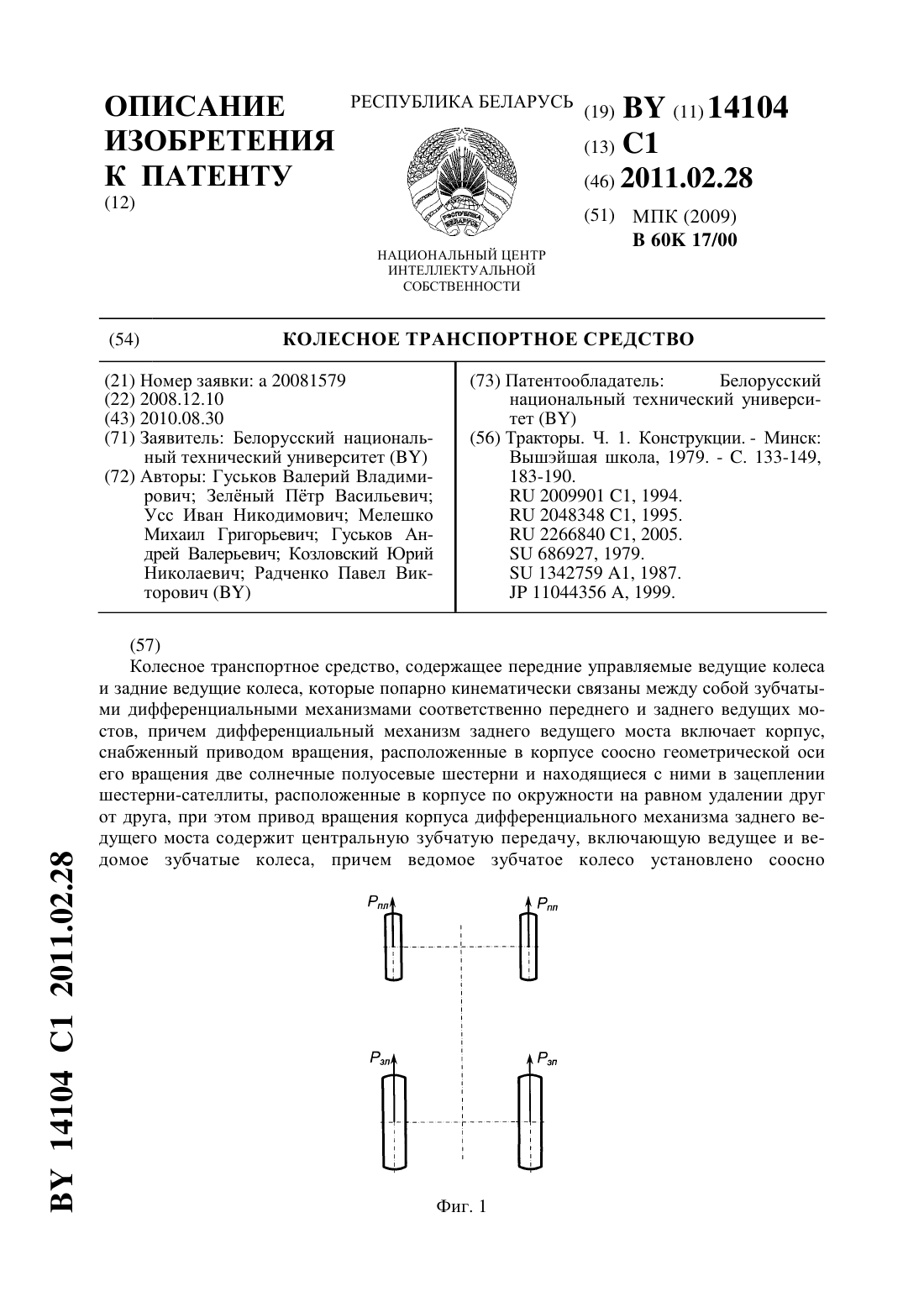
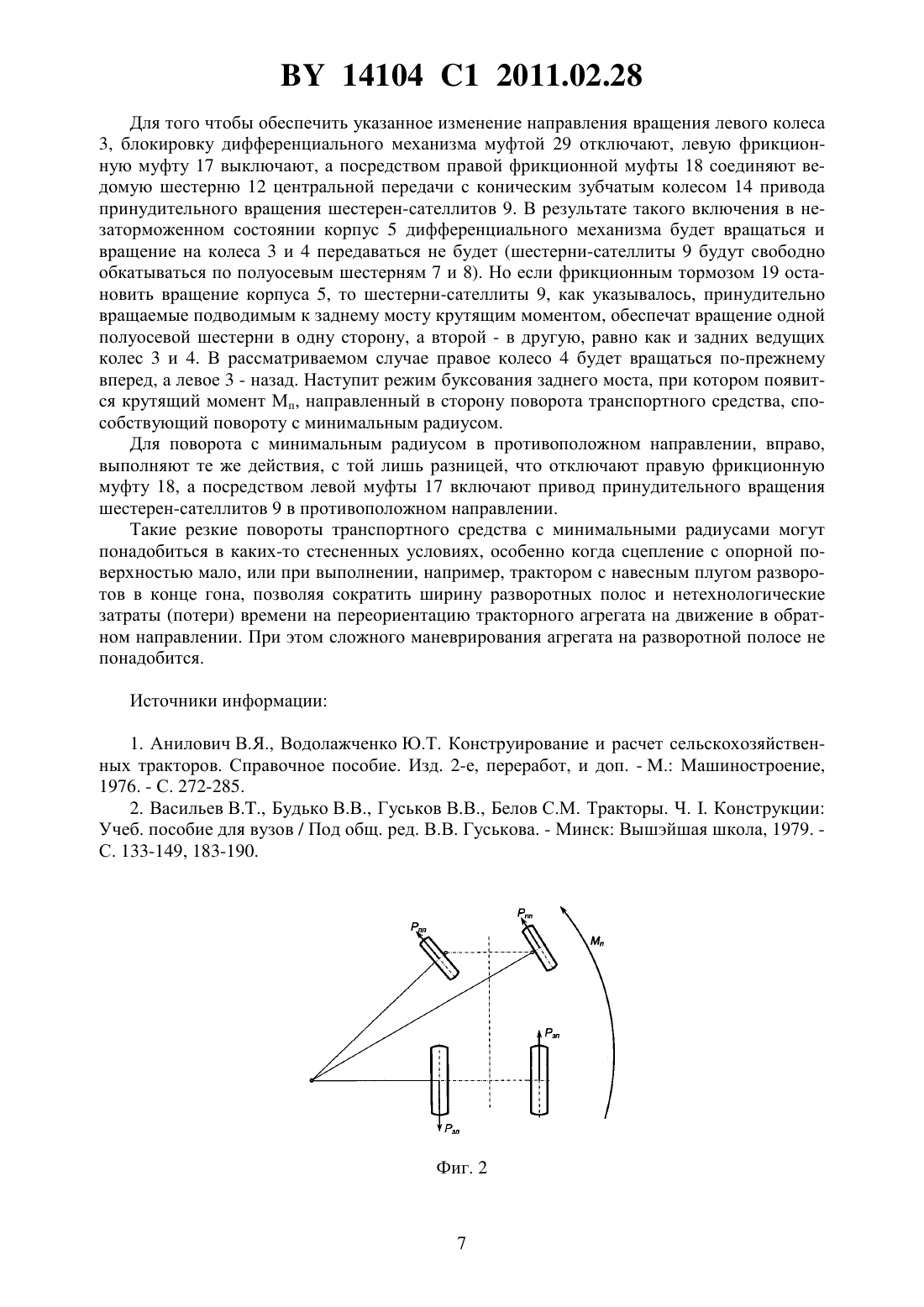
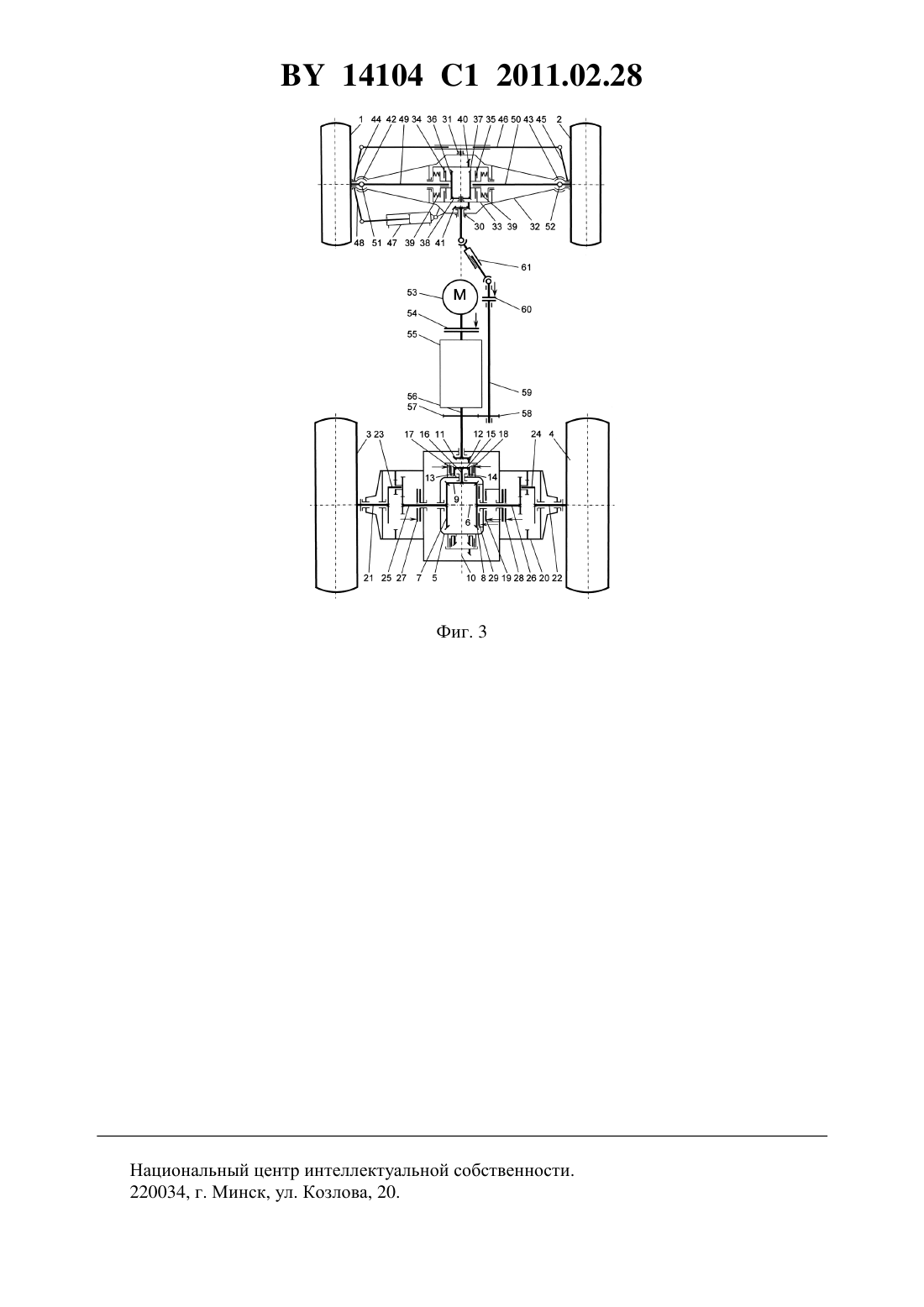
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский национальный технический университет(72) Авторы Гуськов Валерий Владимирович Зелный Птр Васильевич Усс Иван Никодимович Мелешко Михаил Григорьевич Гуськов Андрей Валерьевич Козловский Юрий Николаевич Радченко Павел Викторович(73) Патентообладатель Белорусский национальный технический университет(57) Колесное транспортное средство, содержащее передние управляемые ведущие колеса и задние ведущие колеса, которые попарно кинематически связаны между собой зубчатыми дифференциальными механизмами соответственно переднего и заднего ведущих мостов, причем дифференциальный механизм заднего ведущего моста включает корпус,снабженный приводом вращения, расположенные в корпусе соосно геометрической оси его вращения две солнечные полуосевые шестерни и находящиеся с ними в зацеплении шестерни-сателлиты, расположенные в корпусе по окружности на равном удалении друг от друга, при этом привод вращения корпуса дифференциального механизма заднего ведущего моста содержит центральную зубчатую передачу, включающую ведущее и ведомое зубчатые колеса, причем ведомое зубчатое колесо установлено соосно 14104 1 2011.02.28 геометрической оси вращения корпуса дифференциального механизма заднего ведущего моста, отличающееся тем, что ведомое зубчатое колесо центральной зубчатой передачи кинематически связано с шестернями-сателлитами посредством двух дополнительных соосных ему конических зубчатых колес, посаженных с возможностью вращения на корпус дифференциального механизма заднего ведущего моста по обе стороны от плоскости расположения шестерен-сателлитов, и находящихся в зацеплении с ними конических шестерен, соосных шестерням-сателлитам и связанных с шестернями-сателлитами посредством валов, при этом ведомое зубчатое колесо центральной зубчатой передачи связано с указанными коническими зубчатыми колесами и корпусом дифференциального механизма заднего ведущего моста посредством управляемых муфт, причем корпус дифференциального механизма заднего ведущего моста снабжен управляемым тормозом. Изобретение относится к колесным транспортным средствам, преимущественно предназначенным для работы во внедорожных условиях, в частности к сельскохозяйственным и промышленным тракторам, строительным и дорожным машинам другого назначения,различной специальной колесной технике, эксплуатируемой вне дорог. Известно колесное транспортное средство 1, содержащее две главные (центральные) передачи с ведущими, кинематически связанными с двигателем, и ведомыми, кинематически связанными с ведущими колесами, шестернями, причем связь каждой ведущей шестерни с двигателем осуществлена через реверсивную коробку перемены передач и управляемую фрикционную муфту, а кроме того, каждая ведущая шестерня снабжена фрикционным тормозным механизмом. Недостатком известного устройства управления колесным транспортным средством при его движении на повороте является невысокая точность осуществления этого управления, выражающаяся в отклонении действительной траектории движения транспортного средства на повороте от желаемой (заданной) или невписываемости транспортного средства в заданный коридор движения. Такое управление транспортным средством малопригодно, если, например, сельскохозяйственному трактору необходимо осуществлять движение по определенной задаваемой траектории - следу маркера или при маневрировании в стесненных условиях. Известно колесное транспортное средство 2 (прототип), содержащее передние управляемые ведущие колеса и задние ведущие колеса, которые попарно кинематически связаны между собой зубчатым дифференциальным механизмом соответственно переднего и заднего ведущих мостов, причем дифференциальный механизм заднего ведущего моста включает корпус, снабженный приводом вращения, расположенные в корпусе соосно геометрической оси его вращения две солнечные полуосевые шестерни и находящиеся с ним в зацеплении шестерни-сателлиты, расположенные в корпусе по окружности на равном удалении друг от друга, при этом привод вращения корпуса дифференциального механизма заднего ведущего моста содержит центральную зубчатую передачу,включающую ведущее и ведомое зубчатые колеса, причем ведомое зубчатое колесо установлено соосно геометрической оси вращения корпуса дифференциального механизма заднего ведущего моста. Недостатком, присущим этому колесному транспортному средству, является недостаточная поворачиваемость, то есть невозможность движения с минимальным радиусом поворота. Такое движение необходимо осуществлять, например, сельскохозяйственным тракторам в полевых условиях при переориентации трактора всякий раз в конце рабочего хода для выполнения рабочего хода в обратном направлении, так как разворотные полосы(загоны) по краям поля стремятся иметь минимальной ширины для максимального использования всей его площади. 2 14104 1 2011.02.28 Задачей, решаемой заявляемым техническим предложением, является уменьшение радиуса поворота колесного транспортного средства во внедорожных условиях. Указанная задача решается тем, что в колесном транспортном средстве, содержащем передние управляемые ведущие колеса и задние ведущие колеса, которые попарно кинематически связаны между собой зубчатым дифференциальным механизмом соответственно, переднего и заднего ведущих мостов, причем дифференциальный механизм заднего ведущего моста включает корпус, снабженный приводом вращения, расположенные в корпусе соосно геометрической оси его вращения две солнечные полуосевые шестерни и находящиеся с ним в зацеплении шестерни-сателлиты, расположенные в корпусе по окружности на равном удалении друг от друга, при этом привод вращения корпуса дифференциального механизма заднего ведущего моста содержит центральную зубчатую передачу, включающую ведущее и ведомое зубчатые колеса, причем ведомое зубчатое колесо установлено соосно геометрической оси вращения корпуса дифференциального механизма заднего ведущего моста, ведомое зубчатое колесо центральной зубчатой передачи кинематически связано с шестернями-сателлитами посредством двух дополнительных соосных ему конических зубчатых колес, посаженных с возможностью вращения на корпус дифференциального механизма заднего ведущего моста по обе стороны от плоскости расположения шестерен-сателлитов, и находящихся в зацеплении с ними конических шестерен, соосных шестерням-сателлитам и связанных с шестернями-сателлитами посредством валов, при этом ведомое зубчатое колесо центральной зубчатой передачи связано с указанными коническими зубчатыми колесами и корпусом дифференциального механизма заднего ведущего моста посредством управляемых муфт, причем корпус дифференциального механизма заднего ведущего моста снабжен управляемым тормозом. Перечисленная совокупность существенных признаков позволяет получить следующий технический результат. Для движения транспортного средства на повороте с минимальным радиусом в плоскости движения (в плане) на него обеспечивают действие максимального поворачивающего момента, причем этот момент обеспечивают не только изменением направления тяговых усилий передних управляемых ведущих колес путем их поворота в крайнее положение, но и дополнительно изменением разности тяговых усилий задних ведущих колес, чтобы этот дополнительный момент действовал в том же направлении, что и момент от тягового усилия передних колес. Максимально способствовать повороту этот дополнительный поворачивающий момент будет в том случае, если заднее ведущее колесо, расположенное с той стороны, в которую повернуты передние колеса,изменит тяговое усилие на противоположное. Реализация такого управления транспортным средством при движении на повороте обеспечивается тем, что ведомое зубчатое колесо кинематически связано с шестернямисателлитами посредством двух дополнительных соосных ему зубчатых колес, посаженных с возможностью вращения на корпус дифференциального механизма по обе стороны от плоскости расположения шестерен-сателлитов, и находящихся в зацеплении с ними шестерен, соосных шестерням-сателлитам и соединенных с шестернями-сателлитами, при этом указанные зубчатые колеса связаны с ведомым зубчатым колесом центральной зубчатой передачи посредством управляемых муфт, а корпус дифференциального механизма снабжен управляемым тормозом. Достигаемый этим технический результат будет следующим посредством управляемых муфт соединят одно из дополнительных зубчатых колес с ведомым зубчатым колесом центральной зубчатой передачи, обеспечивая совместное вращение обоих зубчатых колес, а корпус дифференциального механизма затормаживают. В результате будут приведены во вращение центральной зубчатой передачей шестернисателлиты, которые при остановленном несущем их корпусе обеспечат вращение полуосевых солнечных шестерен в противоположные стороны, а вместе с ними и вращение в противоположные стороны задних ведущих колес на крутом повороте. Это обеспечит крутой поворот с минимальным радиусом, так как к остову транспортного средства будет 3 14104 1 2011.02.28 приложен максимальный дополнительный поворачивающий момент в сторону поворота передних ведущих колес. Этим и обеспечивается решение поставленной задачи - уменьшение радиуса поворота колесноготранспортного средства во внедорожных условиях. Возможность реализации заявленного технического решения проиллюстрирована на фиг. 1 приведена схема сил, действующих на колесное транспортное средство для обеспечения его прямолинейного движения на фиг. 2 приведена схема сил и моментов, действующих на колесное транспортное средство при его движении на повороте с минимальным радиусом на фиг. 3 приведена кинематическая схема привода передних управляемых и задних ведущих колес. Заявленное техническое решение реализуется следующим образом. Для движения колесного транспортного средства на повороте с минимальным радиусом в плоскости движения создают поворачивающий момент, действующий на него в направлении его поворота. Для этого вначале изменяют направления тяговых усилий Рпл и Рпп, развиваемых передними ведущими управляемыми колесами, путем их поворота в сторону поворота транспортного средства. Затем создают действующий на него в том же направлении дополнительный поворачивающий момент Мп путем создания разности тяговых усилий Рзл и Рзп, развиваемых задними ведущими колесами противоположных бортов. Разность тяговых усилий, развиваемых задними ведущими колесами, создают путем изменения на противоположное направления тягового усилия Рзл, развиваемого задним ведущим колесом, расположенным с той стороны, в которую повернуты передние ведущие колеса(фиг. 2). В результате появления дополнительного поворачивающего момента Мп транспортное средство будет поворачиваться с минимальным радиусом. Его значение будет тем меньше, чем больше угол поворота передних колес. Такой поворот, конечно, возможен только на поверхности движения, допускающей буксование колес (не на асфальте или бетоне), и должен использоваться на рыхлой или влажной почве (глине, суглинке), в зимних условиях на заснеженной, обледенелой поверхности и т.п. А транспортными средствами,на которых он может быть реализован, могут быть, прежде всего, тракторы сельскохозяйственного назначения, другие внедорожные мобильные машины, например строительные. Устройство такого транспортного средства в той части, которая относится к данному изобретению, представлено кинематической схемой на фиг. 3. На ней изображены передние управляемые ведущие колеса 1 и 2, а также задние ведущие колеса 3 и 4. И те, и другие попарно кинематически связаны между собой зубчатыми дифференциальными механизмами, являющимися основными элементами привода соответственно переднего и заднего ведущих мостов транспортного средства. Дифференциальный механизм заднего ведущего моста состоит из вращающегося корпуса 5, снабженного приводом вращения,расположенных в корпусе соосно геометрической оси 6 его вращения двух солнечных полуосевых шестерен 7 и 8, а также находящихся с ними в зацеплении шестерен-сателлитов 9, расположенных в корпусе 5 в одной геометрической плоскости 10 на равном удалении друг от друга по окружности (изображен только один сателлит). Основной частью указанного привода вращения корпуса 5 является центральная зубчатая передача моста, в которую входят ведущая шестерня 11 и ведомое зубчатое колесо 12, причем ведомое зубчатое колесо установлено соосно геометрической оси 6 вращения корпуса и кинематически связано с шестернями-сателлитами 9 посредством двух дополнительных, соосных оси вращения корпуса, конических зубчатых колес 13 и 14, посаженных с возможностью вращения на корпус 5 дифференциального механизма по обе стороны от плоскости 10 расположения шестерен-сателлитов, и находящихся в зацеплении с ними конических шестерен 15 (изображена только одна), соосных шестерням-сателлитам 9 и соединенных с шестернями-сателлитами валами 16. При этом ведомое зубчатое колесо 12 центральной зубчатой передачи связано с указанными зубчатыми колесами 13 и 14 и корпусом 5 дифференциального механизма посредством управляемых фрикционных муфт - левой 17 и 14104 1 2011.02.28 правой 18, а корпус 5 дифференциального механизма снабжен управляемым фрикционным тормозом 19. Таким образом, зубчатые колеса 13 и 14 и находящиеся с ними в зацеплении конические шестерни 15 с валами 16 образуют привод принудительного вращения шестеренсателлитов 9. На схеме изображены также корпус 20 заднего ведущего моста транспортного средства, выходящие из него наружу полуоси 21 и 22, несущие указанные выше задние колеса 3 и 4 планетарные бортовые зубчатые передачи 23 и 24, через которые колеса 3 и 4 приводятся во вращение от полуосевых шестерен 7 и 8 дифференциального механизма валы 25 и 26, связывающие полуосевые шестерни с планетарными механизмами, снабженные управляемыми фрикционными тормозными механизмами 27 и 28 управляемая фрикционная муфта 29 блокирования дифференциала. Передний ведущий мост транспортного средства, несущий управляемые колеса 1 и 2,содержит свободно качающуюся в поперечной плоскости в опорах 30 и 31 балку 32, представляющую собой полый корпус для размещения в нем деталей привода переднего моста. Привод содержит дифференциальный механизм повышенного трения, помещенный во вращающийся корпус 33. Повышенное трение механизма обеспечивается фрикционными муфтами 34 и 35, через которые осевые усилия, воспринимаемые полуосевыми шестернями 36 и 37 в конических зацеплениях их с сателлитами 38, передаются на вращающийся корпус 33. Указанным осевым усилиям противодействуют пружины 39. В целом такая конструкция обеспечивает тем больший ограниченный момент трения в дифференциальном механизме, чем больший крутящий момент он передает, благоприятно влияя на обеспечение высоких тяговых качеств моста с одной стороны и независимое вращение колес при движении по криволинейной траектории (повороте) с другой. На вращающийся корпус 33 дифференциального механизма посажено ведомое зубчатое колесо 40 центральной зубчатой передачи привода переднего моста, находящееся в зацеплении с ее ведущей шестерней 41. Поскольку передние колеса являются управляемыми для направления движения транспортного средства, они установлены на концах поперечной балки 32 переднего моста посредством шкворневых механизмов 42 и 43, обеспечивающих поворот колес в плане. Согласованность поворота колес обеспечивается так называемой рулевой трапецией, состоящей из рычагов 44 и 45, прикрепленных к поворотным частям шкворневых механизмов, и шарнирно связывающей их поперечной тяги 46 регулируемой длины. Поворот передних колес в плане обеспечивается силовым гидравлическим цилиндром 47,который воздействует на поворотную часть правого шкворневого механизма 42 посредством рычага 48, а через упомянутую рулевую трапецию - и на поворотную часть правого шкворневого механизма 43. Силовой цилиндр управляется насосом-дозатором, приводимым в действие водителем через рулевое колесо (не изображены). Подвод крутящего момента к передним ведущим колесам осуществляется от полуосевых шестерен 36 и 37 дифференциального механизма посредством валов 49 и 50 и кардановых шарниров 51 и 52. Подвод крутящего момента к ведущей шестерне 11 заднего ведущего моста от двигателя 53 осуществляется через управляемую фрикционную муфту сцепления 54 и коробку перемены передач 55, на выходном валу 56 которой и находится указанная шестерня. Перед ней на этот вал посажена и шестерня 57 редуктора, отводящего крутящий момент к ведущей шестерне 41 центральной передачи привода переднего моста. Ведомая шестерня 58 этого редуктора связана валом 59 с управляемой муфтой 60 и далее через карданный телескопический вал 61 - с ведущей шестерней 41. Работает устройство следующим образом. При движении, близком к прямолинейному, к колесам 1 и 2 переднего моста и колесам 3 и 4 заднего моста от двигателя 53 через фрикционную муфту сцепления 54, коробку 5 14104 1 2011.02.28 перемены передач 55, другие элементы привода, изображенные на кинематической схеме(фиг. 3), подводятся крутящие моменты в одном направлении. Они создают в плане касательных реакций Рпл, Рпп, Рзл и зп (тяговые усилия) со стороны опорной поверхности, действующие на колеса в направлении движения транспортного средства. При этом дифференциальные механизмы обоих мостов заблокированы, чтобы каждое ведущее колесо развивало максимальное тяговое усилие, определяемое условиями сцепления его с опорной поверхностью. Блокирование дифференциального механизма заднего моста обеспечивается фрикционной муфтой 29 за счет соединения правой полуосевой шестерни 8 с вращающимся корпусом 5. Блокирование дифференциального механизма переднего моста обеспечивается фрикционными муфтами 34 и 35 за счет связи обеих полуосевых шестерен 36 и 37 с вращающимся корпусом 33. Этот момент блокирования тем больше, чем больший крутящий момент подводится к корпусу 33 от центральной передачи привода переднего моста, так как пары трения во фрикционных муфтах 34 и 35 сжимаются осевыми усилиями, развиваемыми в конических зацеплениях дифференциального механизма привода переднего моста. Момент же блокирования дифференциального механизма заднего моста может быть установлен любым, так как блокирующая фрикционная муфта 29 является управляемой. При этом обе управляемые фрикционные муфты 17 и 18 соединяют ведомую шестерню 12 центральной передачи заднего моста с вращающимся корпусом 5 дифференциального механизма, а управляемый фрикционный тормоз 19 не препятствует вращению корпуса. Расторможены и тормозные механизмы 27 и 28. Фрикционная же муфта 29 обеспечивает необходимый момент блокирования дифференциального механизма. Вращение на колеса 3 и 4 передается от полуосевых шестерен 7 и 8, вращающихся вместе с корпусом 5, через валы 25 и 26 и планетарные зубчатые передачи 23 и 24. Между колесами каждого моста на неровностях опорной поверхности сцепной вес транспортного средства распределяется равномерно благодаря возможности балке 32 переднего моста свободно качаться в поперечной вертикальной плоскости в опорах 30 и 31,что также способствует развитию высоких тяговых качеств всеми колесами транспортного средства. Остановка транспортного средства осуществляется тормозными механизмами 27 и 28 при выключенной фрикционной муфте сцепления 54. При необходимости привод переднего моста может быть отключен управляемой муфтой 60. Величина крутящего момента, передаваемого этой муфтой, является управляемой и не превышает установленной для конкретных условий движения величины, позволяя ограничивать моменты закрутки деталей привода, неизбежно возникающие в реальных условиях эксплуатации по ряду причин - различия в условиях качения колес, изменения давления воздуха в шинах колес и весовой нагрузки на них, конструктивные различия. При превышении моментом закрутки определенного значения контактирующие фрикционные элементы муфты просто проскальзывают, предохраняя детали привода от поломок. Это же имеет место не только между мостами, но и между колесами каждого моста - относительную свободу они получают при проскальзывании контактирующих фрикционных элементов блокирующих муфт 29, 34 и 35. При необходимости совершить крутой поворот в условиях, допускающих скольжение колес заднего моста, оговоренных выше, силовым цилиндром 47, воздействуя через рычаги 48, 44, 45 и тягу 46 рулевой трапеции, передние колеса 1 и 2 поворачивают в сторону необходимого поворота транспортного средства в крайнее положение, например влево,согласно схеме на фиг. 2. Одновременно или чуть погодя в нужный момент заднее ведущее колесо, расположенное с той стороны, в которую повернуты передние ведущие колеса транспортного средства, заставляют вращаться в противоположном первоначальному направлении. В рассматриваемом случае речь идет о левом заднем колесе 3. Направление вращения правого колеса не изменяют. 6 14104 1 2011.02.28 Для того чтобы обеспечить указанное изменение направления вращения левого колеса 3, блокировку дифференциального механизма муфтой 29 отключают, левую фрикционную муфту 17 выключают, а посредством правой фрикционной муфты 18 соединяют ведомую шестерню 12 центральной передачи с коническим зубчатым колесом 14 привода принудительного вращения шестерен-сателлитов 9. В результате такого включения в незаторможенном состоянии корпус 5 дифференциального механизма будет вращаться и вращение на колеса 3 и 4 передаваться не будет (шестерни-сателлиты 9 будут свободно обкатываться по полуосевым шестерням 7 и 8). Но если фрикционным тормозом 19 остановить вращение корпуса 5, то шестерни-сателлиты 9, как указывалось, принудительно вращаемые подводимым к заднему мосту крутящим моментом, обеспечат вращение одной полуосевой шестерни в одну сторону, а второй - в другую, равно как и задних ведущих колес 3 и 4. В рассматриваемом случае правое колесо 4 будет вращаться по-прежнему вперед, а левое 3 - назад. Наступит режим буксования заднего моста, при котором появится крутящий момент Мп, направленный в сторону поворота транспортного средства, способствующий повороту с минимальным радиусом. Для поворота с минимальным радиусом в противоположном направлении, вправо,выполняют те же действия, с той лишь разницей, что отключают правую фрикционную муфту 18, а посредством левой муфты 17 включают привод принудительного вращения шестерен-сателлитов 9 в противоположном направлении. Такие резкие повороты транспортного средства с минимальными радиусами могут понадобиться в каких-то стесненных условиях, особенно когда сцепление с опорной поверхностью мало, или при выполнении, например, трактором с навесным плугом разворотов в конце гона, позволяя сократить ширину разворотных полос и нетехнологические затраты (потери) времени на переориентацию тракторного агрегата на движение в обратном направлении. При этом сложного маневрирования агрегата на разворотной полосе не понадобится. Источники информации 1. Анилович В.Я., Водолажченко Ю.Т. Конструирование и расчет сельскохозяйственных тракторов. Справочное пособие. Изд. 2-е, переработ, и доп. - . Машиностроение,1976. - С. 272-285. 2. Васильев В, Будько В.В., Гуськов В.В., Белов С.М. Тракторы. Ч. . Конструкции Учеб. пособие для вузов / Под общ. ред. В.В. Гуськова. - Минск Вышэйшая школа, 1979. С. 133-149, 183-190. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: B60K 17/00
Метки: колесное, транспортное, средство
Код ссылки
<a href="https://by.patents.su/8-14104-kolesnoe-transportnoe-sredstvo.html" rel="bookmark" title="База патентов Беларуси">Колесное транспортное средство</a>
Колесное транспортное средство
Номер патента: 3496
Опубликовано: 30.09.2000
Авторы: Богодяж Николай Павлович, Коробкин Владимир Андреевич, Лапцевич Александр Иванович, Плахотник Василий Григорьевич, Ильченко Георгий Георгиевич
МПК: B62D 21/02
Метки: средство, транспортное, колесное
Текст:
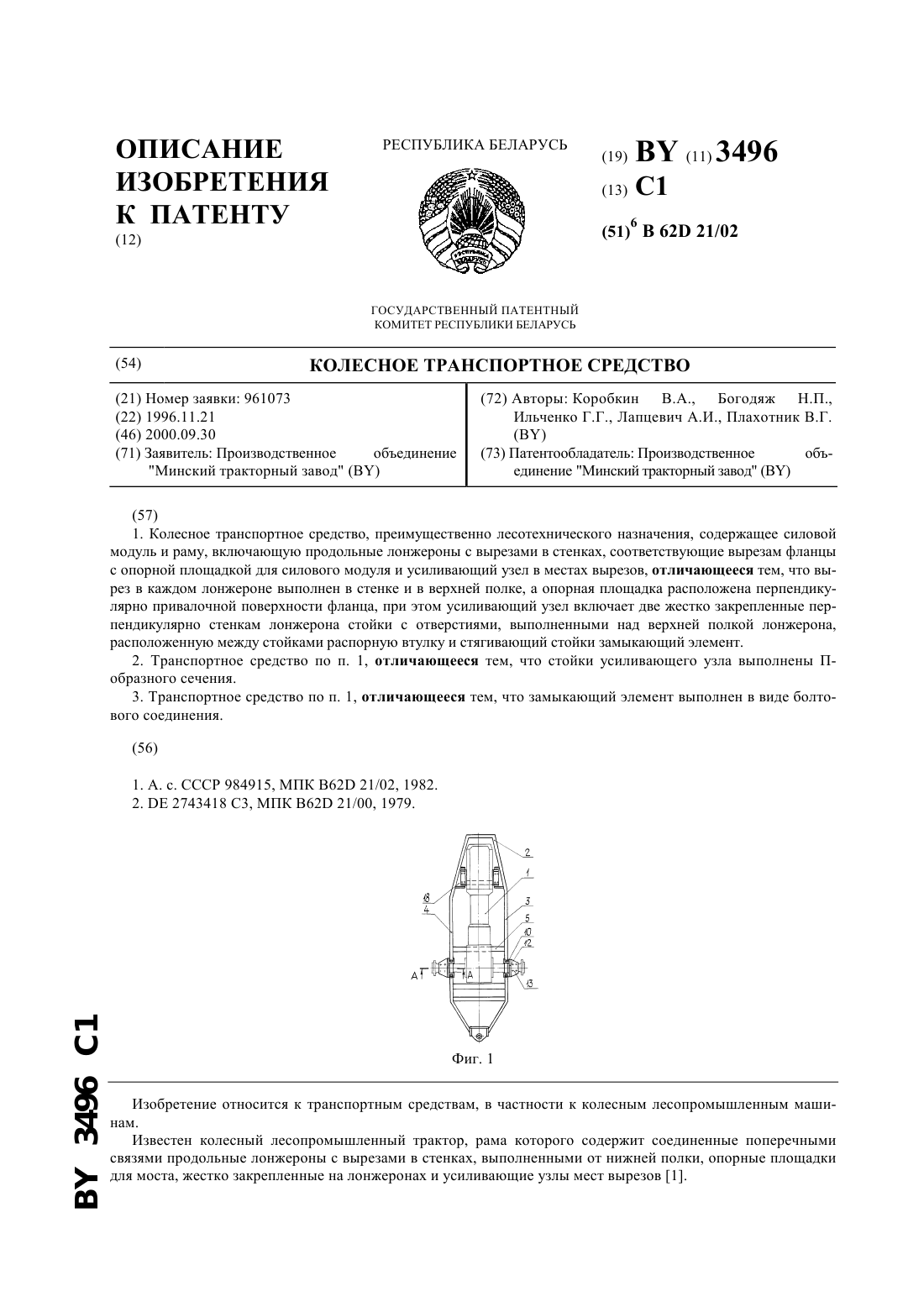
...задачи осуществляется выполнением рамы, содержащей продольные лонжероны с вырезами в стенках и в верхних полках, соответствующие вырезам в лонжеронах фланцы с опорной площадкой, расположенной перпендикулярно привалочной поверхности, и усиливающий узел, включающий две вертикальные стойки, жестко закрепленные к лонжерону перпендикулярно стенкам, с отверстиями, выполненными над верхней полкой лонжерона, распорную втулку, размещенную между...
Транспортное средство с приводом мускульной силой человека
Номер патента: 2157
Опубликовано: 30.06.1998
Автор: Добролюбов Анатолий Иванович
Метки: человека, транспортное, приводом, силой, мускульной, средство
Текст:
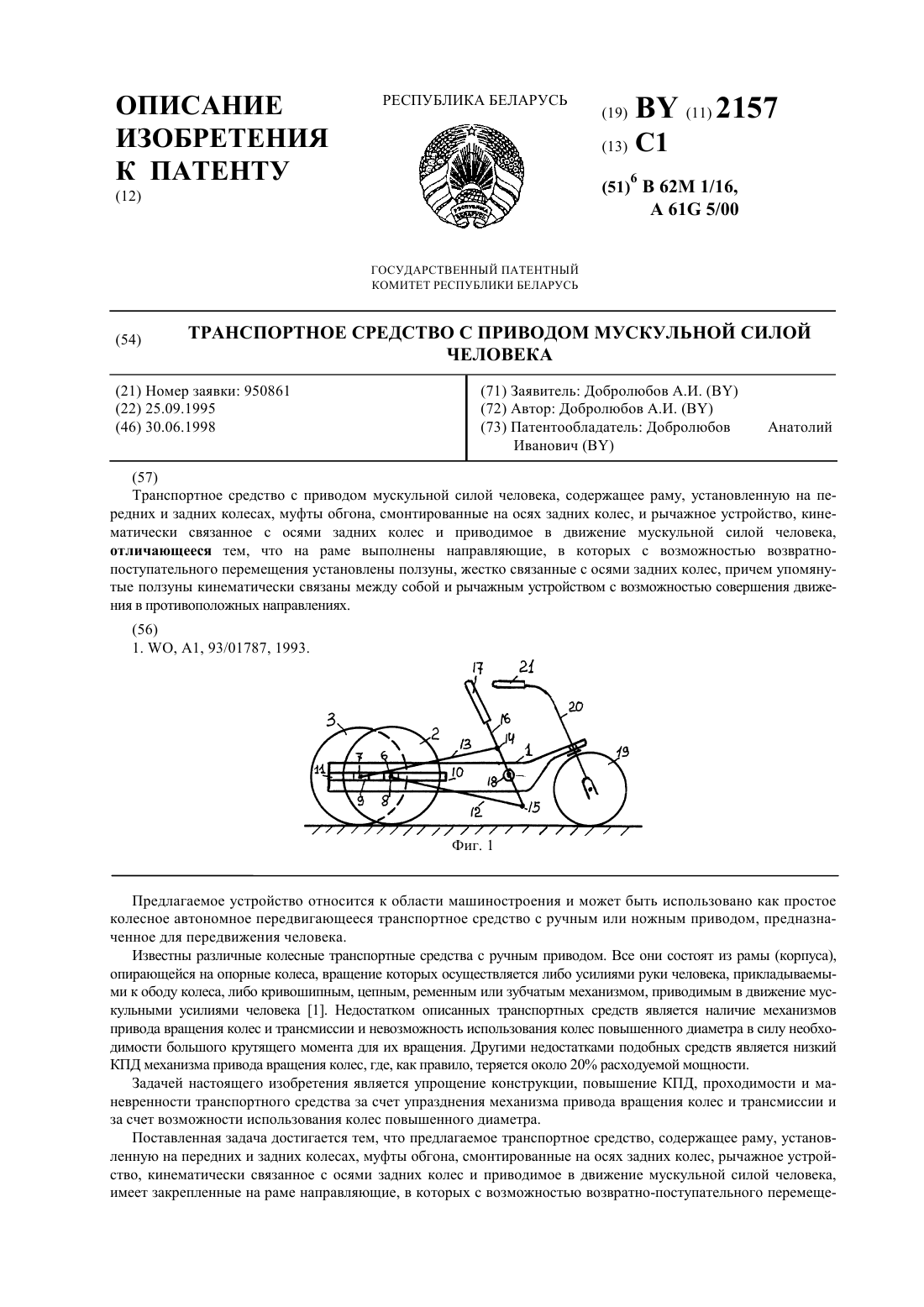
...фиг. 1 и 2 изображена схема предлагаемого транспортного средства, на фиг. 3 изображен вариант схемы с ножным приводом. Транспортное средство (фиг. 1) содержит раму 1, опирающуюся на опорные колеса 2 и 3, снабженные стандартными муфтами обгона 4 и 5. Оси 6 и 7 вращения колес смонтированы на ползунах 8 и 9, способных совершать возвратно-поступательные движения в направляющих 10 и 11, смонтированных на раме 1. Ползуны 8 и 9 шарнирно соединены с...
Транспортное средство повышенной проходимости

Номер патента: U 6071
Опубликовано: 30.04.2010
Авторы: Орда Александр Николаевич, Шкляревич Виктор Александрович
МПК: B60B 11/00
Метки: транспортное, повышенной, средство, проходимости
Текст:
...образования зоны уплотнения и зоны сдвигов при воздействии на почву деформатора с некоторой нагрузкой на фиг. 2 - сдвоенное колесо транспортного средства повышенной проходимости с установленными по обоим его бокам дополнительными выдвижными колесами. Обод 1 сдвоенного колеса устанавливается на ступице, а ступица - на раме транспортного средства повышенной проходимости (на фигурах не показаны). На ободе 1 находятся две шины 2, между которыми...
Транспортное средство
Номер патента: 3101
Опубликовано: 30.12.1999
Авторы: Пархоменко Александр Георгиевич, Жадик Александр Васильевич, Жадик Павел Васильевич, Геращенко Василий Васильевич, Быков Василий Филиппович
МПК: B60K 41/00
Метки: транспортное, средство
Текст:
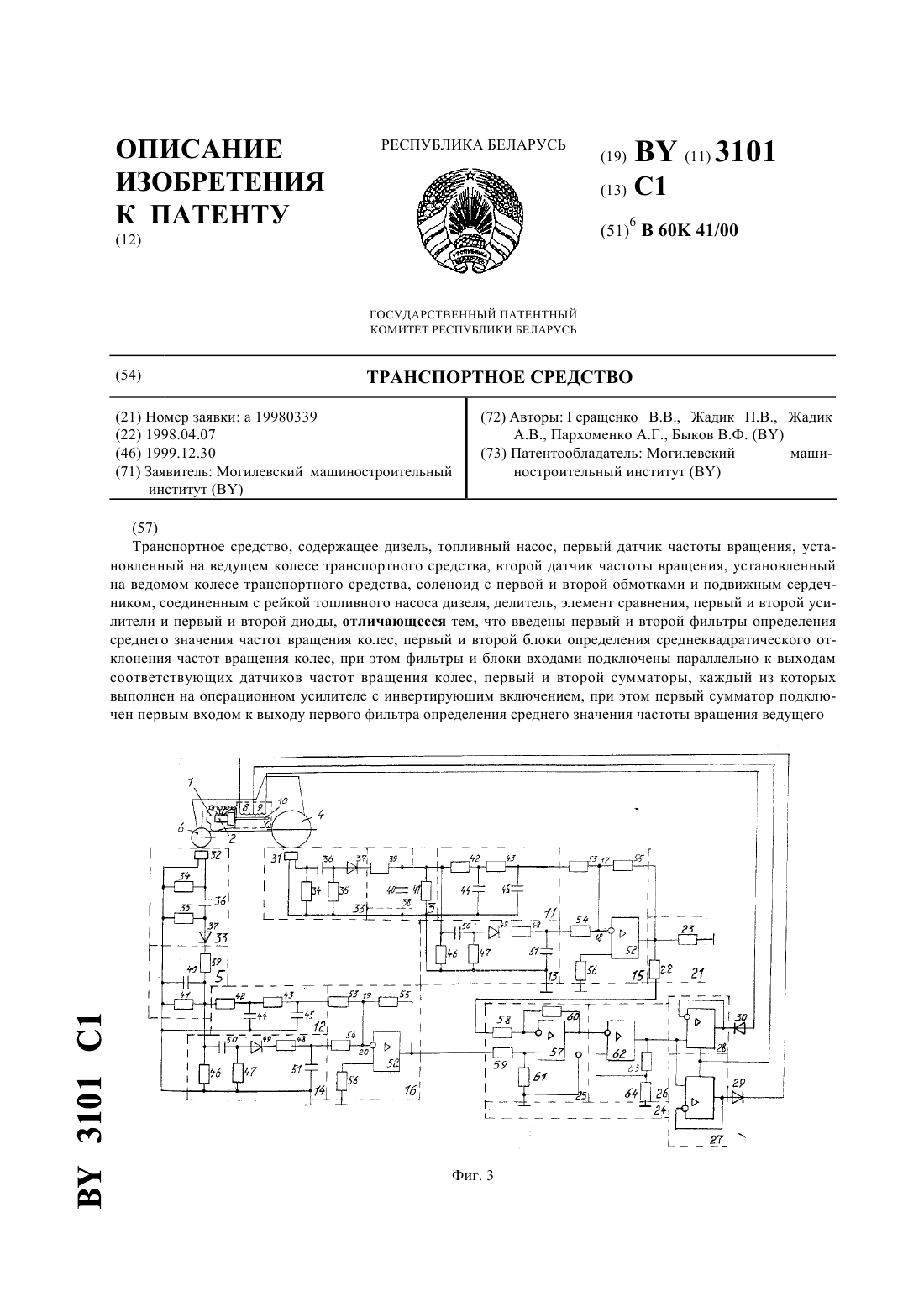
...второй сумматоры, каждый из которых выполнен на операционном усилителе с инвертирующим включением, при этом первый сумматор подключен первым входом к выходу первого фильтра определения среднего значения частоты вращения ведущего колеса, вторым входом - к выходу первого блока определения среднеквадратического отклонения частоты вращения ведущего колеса, второй сумматор подключен первым входом к выходу второго фильтра определения среднего...
Малогабаритное транспортное средство
Номер патента: U 3475
Опубликовано: 30.04.2007
Автор: ГЕРАСИМЕНКО ИГОРЬ ЯКОВЛЕВИЧ
МПК: B62D 21/00
Метки: транспортное, малогабаритное, средство
Текст:
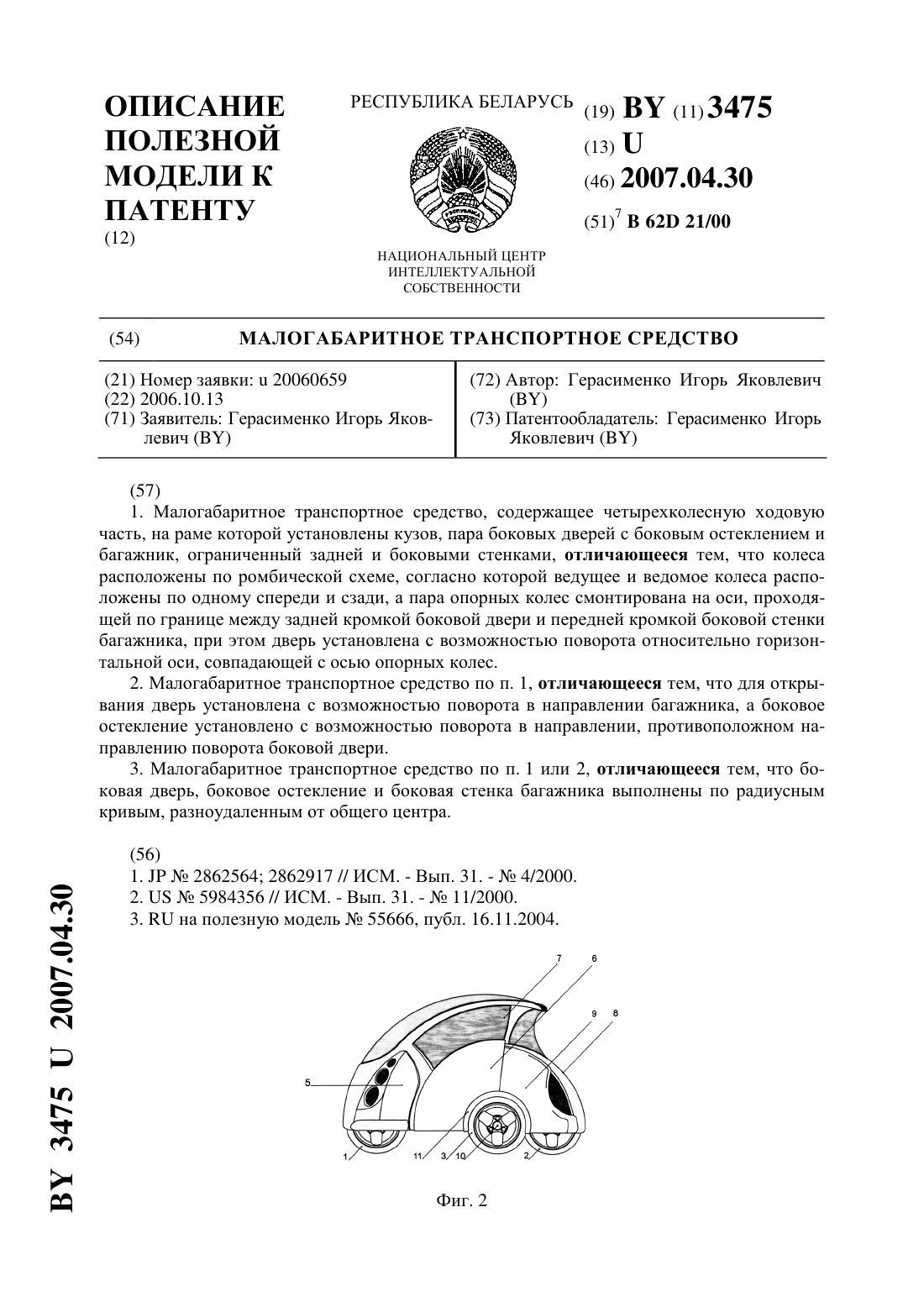
...конструкция малогабаритного транспортного средства, состояла в том, чтобы создать устойчивый городской транспорт,схема расположения четырех колес которого обеспечивает возможность открывания боковых дверей путем поворота относительно горизонтальной оси без выхода их за габариты машины. Поставленная задача решена следующим образом. Предложено малогабаритное транспортное средство, содержащее четырехколесную ходовую часть, на раме которой...
Предыдущий патент: Лемех плуга
Следующий патент: Электрическая подстанция
Случайный патент: Сельскохозяйственная уборочная машина