Управляющее устройство для противоблокировочной системы тормозов транспортного средства
Номер патента: U 517
Опубликовано: 30.03.2002
Авторы: Рябцев Олег Егорович, Гаухштейн Иосиф Самуилович, Мальцев Николай Григорьевич, Чернин Михаил Абрамович, Стельмах Александр Иванович, Лабецкий Леонид Николаевич, Ракомсин Александр Петрович, Бурдыкин Иван Васильевич, Корсаков Владимир Владимирович, Огнев Артур Юрьевич

Текст
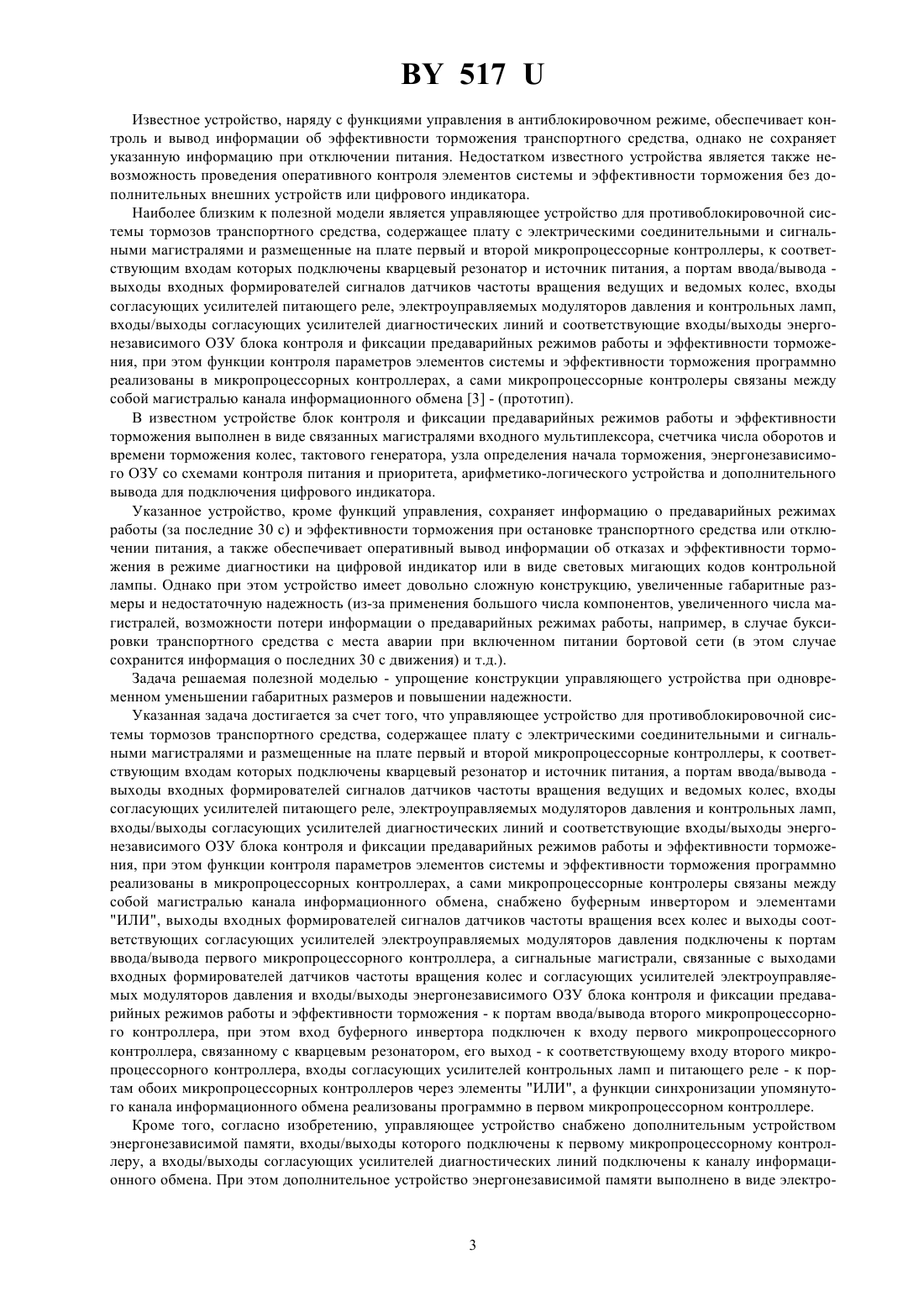
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРОТИВОБЛОКИРОВОЧНОЙ СИСТЕМЫ ТОРМОЗОВ ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Научно-производственное республиканское унитарное предприятие Экран(73) Патентообладатель Научно-производственное республиканское унитарное предприятие Экран(57) 1. Управляющее устройство для противоблокировочной системы тормозов транспортного средства, содержащее плату с электрическими соединительными и сигнальными магистралями и размещенные на плате первый и второй микропроцессорные контроллеры, к соответствующим входам которых подключены кварцевый резонатор и источник питания, а портам ввода/вывода - выходы входных формирователей сигналов датчиков частоты вращения ведущих и ведомых колес, входы согласующих усилителей питающего реле,электроуправляемых модуляторов давления и контрольных ламп, входы/выходы согласующих усилителей диагностических 517 линий и соответствующие входы/выходы энергонезависимого ОЗУ блока контроля и фиксации предаварийных режимов работы и эффективности торможения, при этом функции контроля параметров элементов системы и эффективности торможения программно реализованы в микропроцессорных контроллерах, а сами микропроцессорные контроллеры связаны между собой каналом информационного обмена, отличающееся тем, что оно снабжено буферным инвертором и элементами И, выходы входных формирователей сигналов датчиков частоты вращения всех колес и выходы соответствующих согласующих усилителей электроуправляемых модуляторов давления подключены к портам ввода/вывода первого микропроцессорного контроллера, а сигнальные магистрали, связанные с выходами входных формирователей датчиков частоты вращения колес и согласующих усилителей электроуправляемых модуляторов давления и входы/выходы энергонезависимого ОЗУ блока контроля и фиксации предаварийных режимов работы и эффективности торможения - к портам ввода/вывода второго микропроцессорного контроллера, при этом вход буферного инвертора подключен к входу первого микропроцессорного контроллера, связанному с кварцевым резонатором, его выход- к соответствующему входу второго микропроцессорного контроллера, входы согласующих усилителей контрольных ламп и питающего реле - к одноименным портам обоих микропроцессорных контроллеров через элементы И, а функции синхронизации упомянутого канала информационного обмена реализованы программно в первом микропроцессорном контроллере. 2. Управляющее устройство по п. 1, отличающееся тем, что оно снабжено дополнительным устройством энергонезависимой памяти, входы/выходы которого подключены к первому микропроцессорному контроллеру, а входы/выходы согласующих усилителей диагностических линий подключены к каналу информационного обмена, при этом дополнительное устройство энергонезависимой памяти выполнено в виде электроперепрограммируемого ПЗУ, программно подключаемого через микропроцессорный контроллер и канал информационного обмена к согласующим усилителям диагностических линий. Полезная модель относится к транспортному машиностроению и может быть использована в противоблокировочных тормозных системах автотранспортных средств. Известно управляющее устройство для антиблокировочной системы тормозов автомобиля, содержащее размещенные на одной плате и связанные между собой магистралью информационного обмена два управляющих микропроцессорных контроллера, к соответствующим входам которых подключены кварцевые резонаторы и источник питания, а к портам ввода/вывода -соответствующие вводы/выводы входных формирователей сигналов датчиков частоты вращения колес, входы согласующих усилителей контрольных ламп,питающих реле и диагностических линий, электроперепрограммируемые запоминающие устройства и дополнительные микропроцессорные контроллеры согласующих усилителей электроуправляемых модуляторов давления тормозных контуров. При этом функции контроля параметров элементов системы и сигнализации программно реализованы в управляющих и дополнительных микропроцессорных контроллерах 1. Устройство обеспечивает управление торможением колес автомобиля в антиблокировочном режиме,хранение информации об отказах элементов системы, в том числе при отключении питания, и выдачу сообщения о неисправностях в виде световых мигающих кодов на контрольные лампы в режиме диагностики. Недостатком данного управляющего устройства является то, что устройство не позволяет проводить проверку и интегральную оценку эффективности работы антиблокировочной системы тормозов в процессе эксплуатации. При этом практически невозможна также однозначная оценка и квалификация действий водителя и работы тормозной системы в случае дорожно-транспортного происшествия (ДТП), т.к. в процессе антиблокировочного торможения автомобиль практически не оставляет видимых следов на дороге (происходит торможение без юза). Известно также управляющее устройство для противоблокировочной системы тормозов транспортного средства, содержащее источник питания, входные формирователи сигналов датчиков частоты вращения колес, согласующие усилители электроуправляемых модуляторов тормозного давления, питающих реле и контрольной лампы, блоки контроля параметров и сигнализации, дополнительный блок контроля эффективности торможения, соединительные магистрали и микропроцессорные вычислители для каждой пары колес,связанные между собой каналом информационного обмена, при этом входы согласующих усилителей питающих реле и контрольной лампы подключены к портам ввода/вывода обоих микропроцессорных вычислителей, блоки контроля параметров и сигнализации программно реализованы в микропроцессорных вычислителях, а микропроцессорные вычислители выполнены в виде однокристальных микроЭВМ 2. 517 Известное устройство, наряду с функциями управления в антиблокировочном режиме, обеспечивает контроль и вывод информации об эффективности торможения транспортного средства, однако не сохраняет указанную информацию при отключении питания. Недостатком известного устройства является также невозможность проведения оперативного контроля элементов системы и эффективности торможения без дополнительных внешних устройств или цифрового индикатора. Наиболее близким к полезной модели является управляющее устройство для противоблокировочной системы тормозов транспортного средства, содержащее плату с электрическими соединительными и сигнальными магистралями и размещенные на плате первый и второй микропроцессорные контроллеры, к соответствующим входам которых подключены кварцевый резонатор и источник питания, а портам ввода/вывода выходы входных формирователей сигналов датчиков частоты вращения ведущих и ведомых колес, входы согласующих усилителей питающего реле, электроуправляемых модуляторов давления и контрольных ламп,входы/выходы согласующих усилителей диагностических линий и соответствующие входы/выходы энергонезависимого ОЗУ блока контроля и фиксации предаварийных режимов работы и эффективности торможения, при этом функции контроля параметров элементов системы и эффективности торможения программно реализованы в микропроцессорных контроллерах, а сами микропроцессорные контролеры связаны между собой магистралью канала информационного обмена 3 - (прототип). В известном устройстве блок контроля и фиксации предаварийных режимов работы и эффективности торможения выполнен в виде связанных магистралями входного мультиплексора, счетчика числа оборотов и времени торможения колес, тактового генератора, узла определения начала торможения, энергонезависимого ОЗУ со схемами контроля питания и приоритета, арифметико-логического устройства и дополнительного вывода для подключения цифрового индикатора. Указанное устройство, кроме функций управления, сохраняет информацию о предаварийных режимах работы (за последние 30 с) и эффективности торможения при остановке транспортного средства или отключении питания, а также обеспечивает оперативный вывод информации об отказах и эффективности торможения в режиме диагностики на цифровой индикатор или в виде световых мигающих кодов контрольной лампы. Однако при этом устройство имеет довольно сложную конструкцию, увеличенные габаритные размеры и недостаточную надежность (из-за применения большого числа компонентов, увеличенного числа магистралей, возможности потери информации о предаварийных режимах работы, например, в случае буксировки транспортного средства с места аварии при включенном питании бортовой сети (в этом случае сохранится информация о последних 30 с движения) и т.д.). Задача решаемая полезной моделью - упрощение конструкции управляющего устройства при одновременном уменьшении габаритных размеров и повышении надежности. Указанная задача достигается за счет того, что управляющее устройство для противоблокировочной системы тормозов транспортного средства, содержащее плату с электрическими соединительными и сигнальными магистралями и размещенные на плате первый и второй микропроцессорные контроллеры, к соответствующим входам которых подключены кварцевый резонатор и источник питания, а портам ввода/вывода выходы входных формирователей сигналов датчиков частоты вращения ведущих и ведомых колес, входы согласующих усилителей питающего реле, электроуправляемых модуляторов давления и контрольных ламп,входы/выходы согласующих усилителей диагностических линий и соответствующие входы/выходы энергонезависимого ОЗУ блока контроля и фиксации предаварийных режимов работы и эффективности торможения, при этом функции контроля параметров элементов системы и эффективности торможения программно реализованы в микропроцессорных контроллерах, а сами микропроцессорные контролеры связаны между собой магистралью канала информационного обмена, снабжено буферным инвертором и элементами ИЛИ, выходы входных формирователей сигналов датчиков частоты вращения всех колес и выходы соответствующих согласующих усилителей электроуправляемых модуляторов давления подключены к портам ввода/вывода первого микропроцессорного контроллера, а сигнальные магистрали, связанные с выходами входных формирователей датчиков частоты вращения колес и согласующих усилителей электроуправляемых модуляторов давления и входы/выходы энергонезависимого ОЗУ блока контроля и фиксации предаварийных режимов работы и эффективности торможения - к портам ввода/вывода второго микропроцессорного контроллера, при этом вход буферного инвертора подключен к входу первого микропроцессорного контроллера, связанному с кварцевым резонатором, его выход - к соответствующему входу второго микропроцессорного контроллера, входы согласующих усилителей контрольных ламп и питающего реле - к портам обоих микропроцессорных контроллеров через элементы ИЛИ, а функции синхронизации упомянутого канала информационного обмена реализованы программно в первом микропроцессорном контроллере. Кроме того, согласно изобретению, управляющее устройство снабжено дополнительным устройством энергонезависимой памяти, входы/выходы которого подключены к первому микропроцессорному контроллеру, а входы/выходы согласующих усилителей диагностических линий подключены к каналу информационного обмена. При этом дополнительное устройство энергонезависимой памяти выполнено в виде электро 3 517 перепрограммируемого ПЗУ (ЭППЗУ), программно подключаемого через микропроцессорный контроллер и канал информационного обмена к согласующим усилителям диагностических линий. Тем самым за счет применения новых элементов (буферного инвертора и элементов ИЛИ) и связей,существенно сокращаются общее число размещаемых на плате элементов и длины электрических соединительных магистралей, а следовательно, существенно упрощается конструкция устройства при одновременном уменьшении его габаритных размеров и повышении надежности. Кроме того, обеспечивается дублирование хранения информации в энергонезависимом ОЗУ (за последние 40 с) и дополнительном ЭППЗУ (за все время работы), что существенно повышает возможность надежного получения оперативной и достоверной информации в процессе диагностирования системы или анализа ее функционирования, например в случае возникновения ДТП. Структурно-функциональная схема заявляемого управляющего устройства показана на чертеже. Управляющее устройство содержит плату 1 и размещенные на плате первый и второй микропроцессорные контроллеры 2 и 3, источник питания 4, кварцевый резонатор 5, входные формирователи 6 и 7 датчиков Д 1 и Д 2 частоты вращения ведущих и ведомых колес, согласующие усилители 8, 9 и 10 электроуправляемых модуляторов давления (ЭУМД), согласующие усилители 11, 12, 13 и 14 соответственно питающего реле 15,контрольных ламп 1 и Л 2 и диагностических линий К и , подключенных к выводам 1 В 2. На плате 1 размещены также блок 16 фиксации предаварийных режимов работы и эффективности торможения, включающий энергонезависимое ОЗУ 17 с автономным источником питания и схемой 18 контроля питания и приоритета, буферный инвертор 19 и дополнительное устройство 20 энергонезависимой памяти. Микропроцессорные контроллеры 2 и 3 связаны между собой каналом 21 информационного обмена. Выходы входных формирователей 6, 7 датчиков частоты вращения всех колес и входы согласующих усилителей 8, 9 и 10 электроуправляемых модуляторов давления подключены к портам ввода/вывода первого микропроцессорного контроллера 2 и обратными сигнальными магистралями 22 и 23 - к портам ввода/вывода второго микропроцессорного контроллера 3, который так же связан с соответствующими входами/выходами энергонезависимого ОЗУ 17 блока 16. Входы согласующих усилителей 11, 12 и 13 подключены к одноименным портам ввода/вывода обоих микропроцессорных контроллеров 2 и 3 через элементы ИЛИ 24, а их выходы соответственно к питающему реле 15 и контрольным лампам 1, Л 2. Вход буферного инвертора 19 подключен к входу микропроцессорного контроллера 2, связанному с кварцевым резонатором 5, а его выход - к соответствующему входу микропроцессорного контроллера 3 (предназначенному для подключения кварцевого резонатора). При этом функции синхронизации канала 21 информационного обмена реализованы программно в микропроцессорном контроллере 2 и входы/выходы согласующих усилителей 14 диагностических линийи К подключены к указанному каналу. Дополнительное устройство 20 энергонезависимой памяти выполнено в виде электроперепрограммируемого ПЗУ (ЭППЗУ типа ), входы/выходы которого подключены к свободным портам ввода/вывода микропроцессорного контроллера 2. При этом устройство 20 подключается программно через микропроцессорный контроллер и канал информационного обмена к соответствующим входам/выходам согласующих усилителей 14 диагностических линий К и . К выводам 1 и В 2 диагностических линий К иможет быть подключено внешнее считывающее устройство, а к линии- кнопка ДК вызова режима диагностики по световым мигающим кодам. Устройство работает следующим образом. При включении питания (замыкании выключателя ) микропроцессорные контроллеры 2 и 3 контролируют друг друга через магистраль 21 канала информационного обмена. При этом синхронизация указанного канала производится микропроцессорным контроллером 2, который также через элементы ИЛИ и согласующие усилители 12 и 13 зажигает контрольные лампы Л 1 и Л 2. Одновременно микропроцессорный контроллер 2 опрашивает (электрическими импульсами) через формирователи 6 и 7 и согласующие усилители 8,9 и 10 состояние электрических цепей и параметров элементов системы (обрыв или короткое замыкание датчиков, активное сопротивление цепей и обмоток электроуправляемых клапанов модуляторов и т.д.). При этом оба микропроцессорных контроллера 2 и 3 считывают информационные сигналы квитирования от элементов системы, проверяют значения этих сигналов на достоверность путем сравнения с нижним и верхним пределами возможного диапазона изменения этих сигналов и, если значения информационных сигналов от какого-либо элемента меньше нижнего или больше верхнего предела, то формируют и записывают соответственно в ОЗУ 17 и ЭППЗУ 20 коды вида и места неисправности (т.е. при включении питания производятся все действия так называемого статического контроля элементов системы). При этом код неисправности, сформированный микропроцессорным контроллером 2 записывается в первую область ЭППЗУ 20, а код неисправности, сформированный микропроцессорным контроллером 3 записывается в первой области энергонезависимого ОЗУ 17. Если в результате статического контроля и обмена цифровой информацией по каналу 21 выясняется, что состояние электрических цепей и параметров элементов системы находится в пределах допустимых значений, микропроцессорные контроллеры 2 и 3 выдают соответствующие сигналы на элемент ИЛИ, связан 4 517 ный с согласующим усилителем 13 и контрольная лампа Л 2 гасится (через 1-2 сек после включения питания), а контрольная лампа Л 1 остается в зажженном состоянии. При начале движения (начале вращения колес) транспортного средства квазисинусоидальные сигналы от датчиков Д 1 и Д 2 частоты вращения ведущих и ведомых колес поступают на входные формирователи 6 и 7,где преобразуются в прямоугольные импульсы. Полученная информация обрабатывается микропроцессорными контроллерами 2 и 3, которые в соответствии с заложенными в них алгоритмами следят за скоростью и параметрами сигналов вращения колес (в режиме динамического контроля). При этом во второй области энергонезависимого ОЗУ 17 блока 16, по команде контроллера 2, постоянно обновляется (с периодичностью 0,1 с) текущая информация. При достижении скорости вращения колес соответствующей скорости движения транспортного средства 5-7 км/ч и отсутствии неисправностей, контрольная лампа Л 1 также гасится через элемент ИЛИ и согласующий усилитель 12 (по командам микропроцессорных контроллеров 2 и 3), что свидетельствует о готовности устройства к работе в режиме антиблокировочного регулирования. При обнаружении любым из микропроцессорных контроллеров 2 или 3 неисправности в каком-либо контуре или элементе системы во время движения (например, обрыв в цепи какого либо датчика или модулятора или получение недостоверного сигнала), что определяется микропроцессорными контроллерами по сигналам, поступающим по основным и обратным сигнальным магистралям (22 и 23), микропроцессорным контроллером, первым обнаружившим неисправность, отключается питание (через элементы ИЛИ соответствующего согласующего усилителя 8, 9 или 10 неисправного контура. В случае возникновения опасных неисправностей, например короткого замыкания в силовых цепях, микропроцессорный контроллер 2 или 3 подает соответствующую команду на реле 15 (через элемент ИЛИ и согласующий усилитель 11). Тем самым обесточиваются силовые ключи согласующих усилителей всех электроуправлямых модуляторов давления. И в том и другом случае на панели приборов загорается контрольная лампа Л 1, информирующая водителя о возникновении отказа или неисправности в системе, а информация о месте и виде неисправности записывается в первой области ОЗУ 17 и первой области ЭППЗУ 20, как описывалось выше. Кроме того, как отмечалось выше, в процессе движения транспортного средства микропроцессорный контроллер 3 постоянно считывает из магистралей 22 и 23 и записывает во второй области ОЗУ 17 коды частоты вращения колес в координатах времени и параметры состояния системы (наличие признака торможения, напряжения на электроуправляемых клапанах модуляторов и т.д.), а также формирует сигналы пороговых значений скоростей 40 км/ч и 20 км/ч, при торможении и вычисляет среднее замедление за время снижения скорости с 40 до 20 км/ч. Объем второй области ОЗУ выбран из расчета фиксации режимов работы системы за последние 40 с с периодом в 0,1 с. Информация выходящая за указанный интервал времени (40 с) стирается. При остановке транспортного средства после экстренного торможения в антиблокировочном режиме со скорости превышающей 40 км/ч, код эффективности последнего торможения дополнительно записывается в ЭППЗУ 20. Схема 18 контроля питания обеспечивает подключение резервного источника питания к ОЗУ 17 при отключении или обрыве питания от бортовой сети или источника 4, переводя ОЗУ 17 в режим хранения информации с микромощным потреблением. В случае возникновения неисправности (определяется по внешнему признаку загорания контрольной лампы 1) и вызова режима диагностики путем однократного нажатия (на время 2-3 с) кнопки ДК, производится вывод диагностического сообщения о месте и виде неисправности в виде светового мигающего кода,выводимого на контрольную лампу Л 2 после паузы 2 с. При повторном нажатии кнопки ДК во время указанной паузы, на контрольную лампу Л 2 производится вывод информации об эффективности последнего торможения или среднем замедлении транспортного средства также в виде серий световых миганий контрольной лампы Л 2. При этом число импульсов мигания контрольной лампы в первой серии после отпускания кнопки указывает целое число показателя эффективности торможения или среднего замедления, во второй серии - десятые доли этого показателя, а в третьей серии - сотые доли. Считывание полной информации о состоянии системы (наличие, вид и место неисправностей, эффективность последнего торможения) и предаварийных режимах работы (графическое отображение в координатах времени скорости движения, вращения колес, срабатывания электромагнитных клапанов и т.д.) за последние 40 с производится специальным внешним устройством (диагностическим контроллером) при его подключении к выводам 1 и В 2 и принудительной активизации (программным путем) второй области ОЗУ 17 (через микропроцессорный контроллер 3) и ЭППЗУ 20 (через микропроцессорный контроллер 2). Таким образом устройство, при существенном упрощении конструкции и уменьшении габаритных размеров, позволяет осуществлять наряду с управляющими функциями, встроенную диагностику и вывод информации о неисправностях и эффективности работы системы как на контрольные лампы, так и на внешнее считывающее устройство. При этом обеспечивается дублирование хранения информации в энергонезависимом ОЗУ (за последние 40 с) и дополнительном ЭППЗУ (за все время работы, если не проводилось принуди 5 517 тельного стирания информации по специальному коду на станции ТО или инспекционными органами), что существенно повышает возможность надежного получения оперативной и достоверной информации в процессе диагностирования системы или анализа ее функционирования, например в случае возникновения ДТП. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: B60T 8/88
Метки: системы, средства, транспортного, тормозов, устройство, противоблокировочной, управляющее
Код ссылки
<a href="https://by.patents.su/6-u517-upravlyayushhee-ustrojjstvo-dlya-protivoblokirovochnojj-sistemy-tormozov-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Управляющее устройство для противоблокировочной системы тормозов транспортного средства</a>
Противоблокировочное устройство для тормозной системы транспортного средства
Номер патента: 74
Опубликовано: 30.09.1994
Авторы: Жук Ю. Г., Рудак А. В., Мальцев Николай Григорьевич, Титович А. И.
МПК: B60T 8/88
Метки: средства, системы, транспортного, тормозной, противоблокировочное, устройство
Текст:
...ОЗУ. у При этом питание устройства осуществляется от источника питания считывающеготорможения происходит следующим обра-с зомл.лес с выходов формирователей 2 поочередно поступают через ходной мультиплексор 16 на вход разрешения счета счетчика 17.при наличии признака торможения. формируемого элементом ИЛИ 29 из сигналов датчика торможения (не показан) и выходного сигнала пороговое замедление диф ференциатора 2 врзапускается счетчик...
Противоблокировочное устройство для тормозной системы транспортного средства
Номер патента: 657
Опубликовано: 30.06.1995
Авторы: Хусаинов А. М., Мальцев Н. Г., Паньков И. М., Рудак А. В.
МПК: B60T 8/62
Метки: тормозной, противоблокировочное, средства, устройство, системы, транспортного
Текст:
...колес, и электрическому выключателю, выход - к упомянутому цифровому индикатору, а сам бЛОК ВЫПОЛНСН В ВИДЕ СВЯЗЗННЫХ магистралями входного мультиплексора, счетчиков числа оборотов колес и времени торможения,тактового генератора, узла определения начала торможения, арифметика-логического устройства, элемента И и дополнительного вывода для подключения цифрового индикатора, причем входы счетчика времени торможения связаны с одним из...
Способ встроенного диагностирования антиблокировочной системы тормозов автомобиля и устройство для его осуществления
Номер патента: 2771
Опубликовано: 30.06.1999
Авторы: Бутылин Владимир Григорьевич, Титович Анатолий Иванович, Рудак Андрей Викторович, Шмык Сергей Дмитриевич, Ермилов Александр Анатольевич, Мальцев Николай Григорьевич, Высоцкий Михаил Степанович, Дубровский Виктор Павлович, Жук Юрий Григорьевич, Бурский Алексей Адамович
МПК: B60T 17/22, B60T 8/88
Метки: автомобиля, диагностирования, системы, тормозов, встроенного, способ, осуществления, устройство, антиблокировочной
Текст:
...источник питания, а к портам ввода/вывода - соответствующие вводы/выводы входных формирователей сигналов датчиков частоты вращения колес, двигателя, согласующих усилителей электроуправляемых исполнительных механизмов тормозных контуров, контрольных ламп и диагностических линий, электроперепрограммируемые постоянно-запоминающие устройства (ЭППЗУ), подключенные к свободным портам ввода/вывода каждого из микропроцессорных контроллеров. При этом...
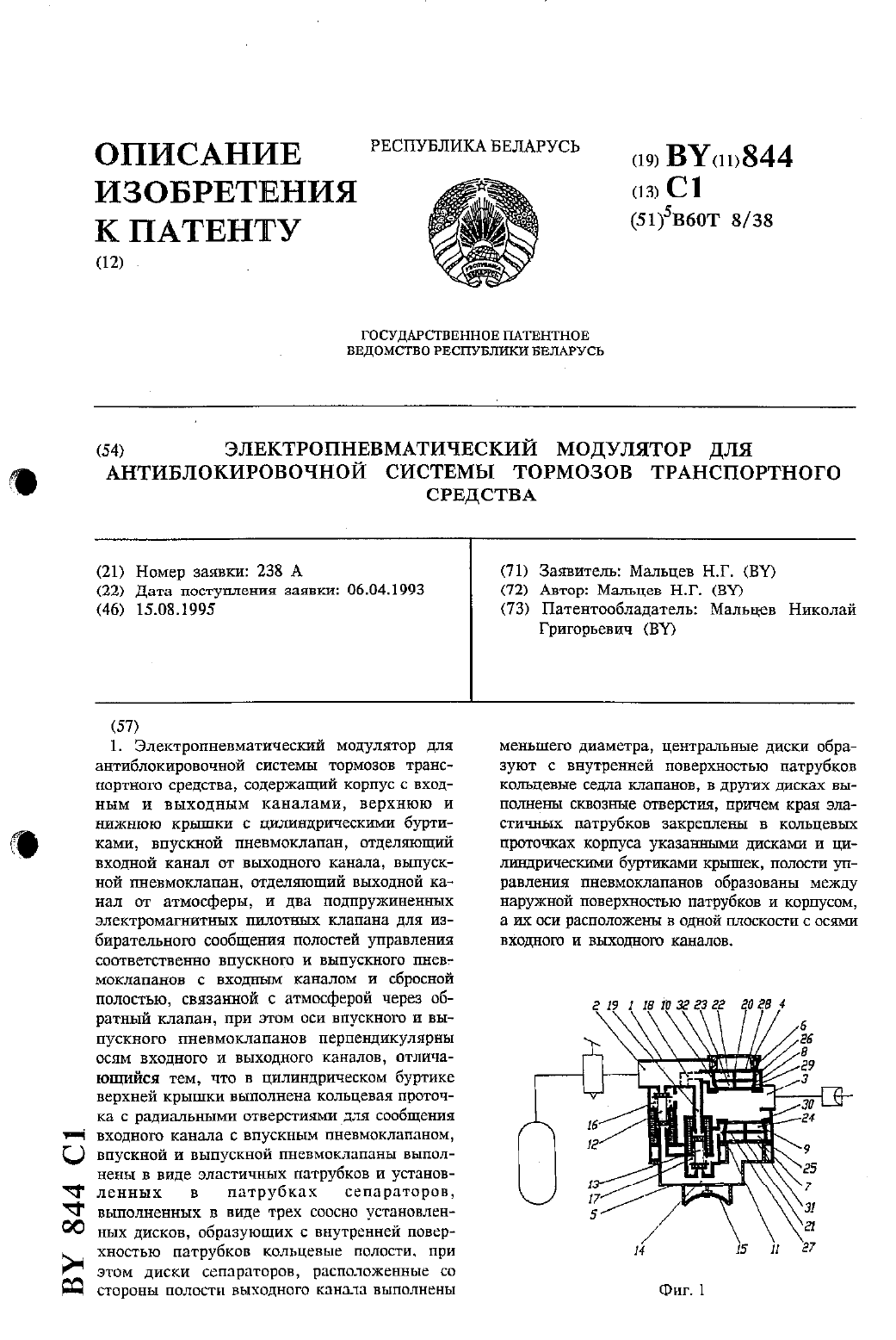
Электропневматический модулятор для антиблокировочной системы тормозов транспортного средства
Номер патента: 844
Опубликовано: 15.08.1995
Автор: Мальцев Николай Григорьевич
МПК: B60T 8/38
Метки: системы, тормозов, средства, транспортного, антиблокировочной, модулятор, электропневматический
Текст:
...суммарной площади сквозных отверстий в дисках сепараторов впускного и вьшускного штевмоклапанов, суммарная площадь радиальных отверстий в цилиндрическом буртике верхней крьшши меньше суммарной площади сквозных отверстий в любом из дисков сепараторов.Тем самым снижается уровень шума при работе модутлятора при одновременном повышенхш его надежности и улучшении динамических и массово-габаритных характеристик.На фиг. 1 показана конструктивная...
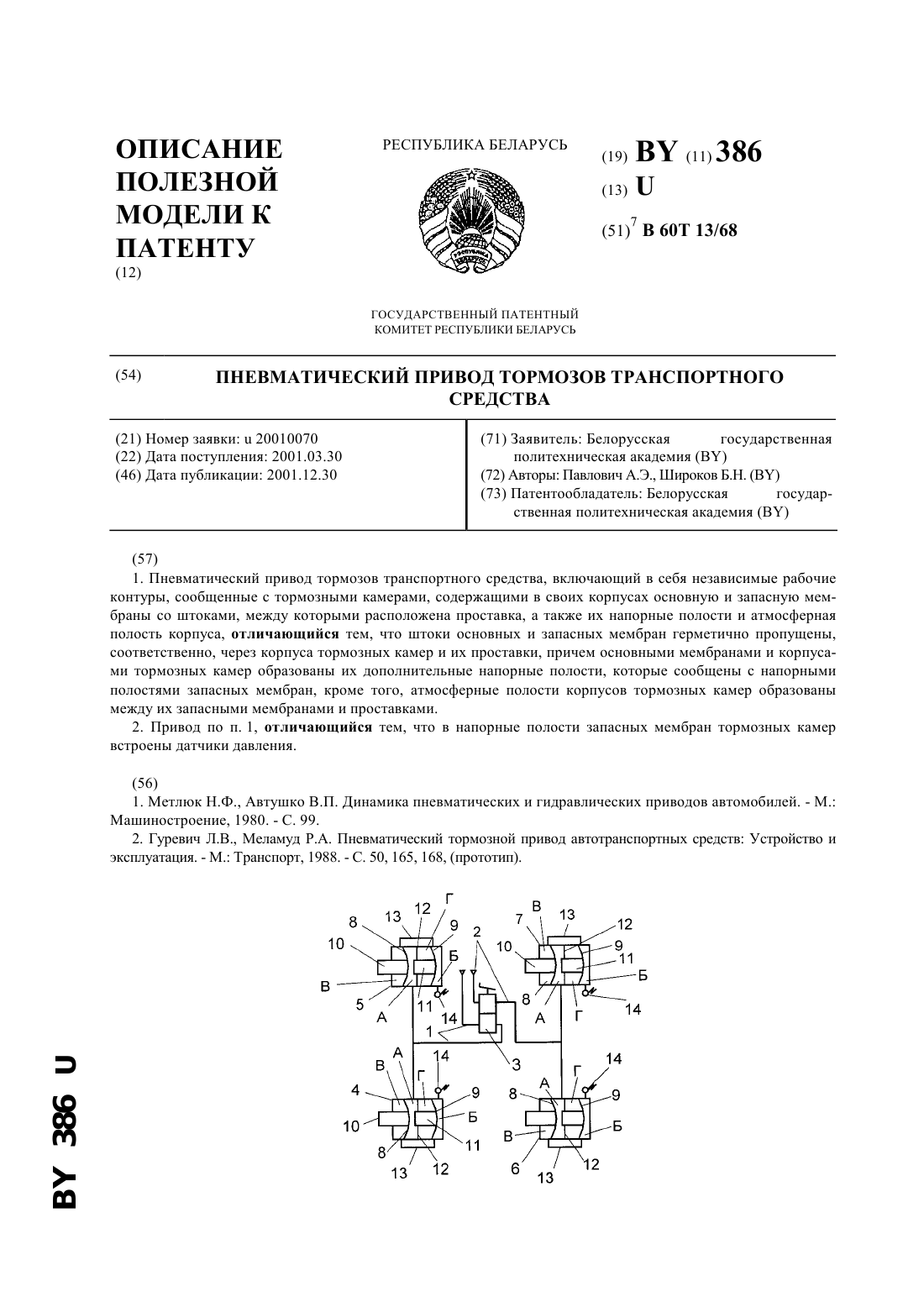
Пневматический привод тормозов транспортного средства
Номер патента: U 386
Опубликовано: 30.12.2001
Авторы: Павлович Александр Эдуардович, Широков Борис Николаевич
МПК: B60T 13/68
Метки: средства, пневматический, привод, транспортного, тормозов
Текст:
...напорную полость основной мембраны с дополнительной напорной полостью. Это сделано также для сохранения энергии поданного сжатого воздуха при торможении транспортного средства, а значит для повышения надежности работы всего пневматического привода тормозов. Образование атмосферных полостей корпусов тормозных камер между их дополнительными мембранами и проставками направлено на возможность получения описанных выше конструктивных отличительных...