Двигательный привод
Номер патента: U 3887
Опубликовано: 30.10.2007
Авторы: Никитин Петр Федорович, Макаревич Сергей Дмитриевич, Лустенков Михаил Евгеньевич, Никитин Алексей Петрович, Слука Михаил Петрович
Текст
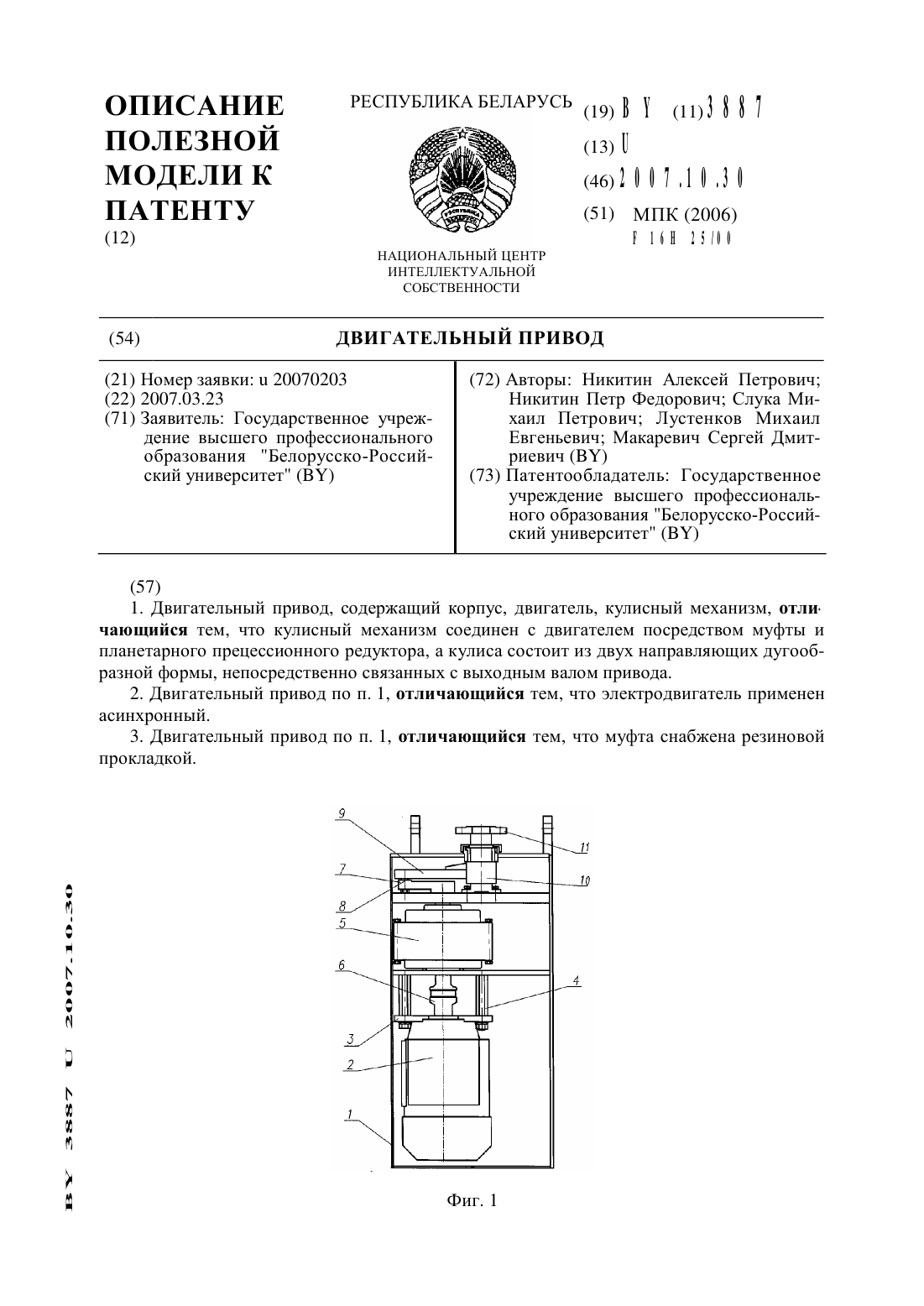
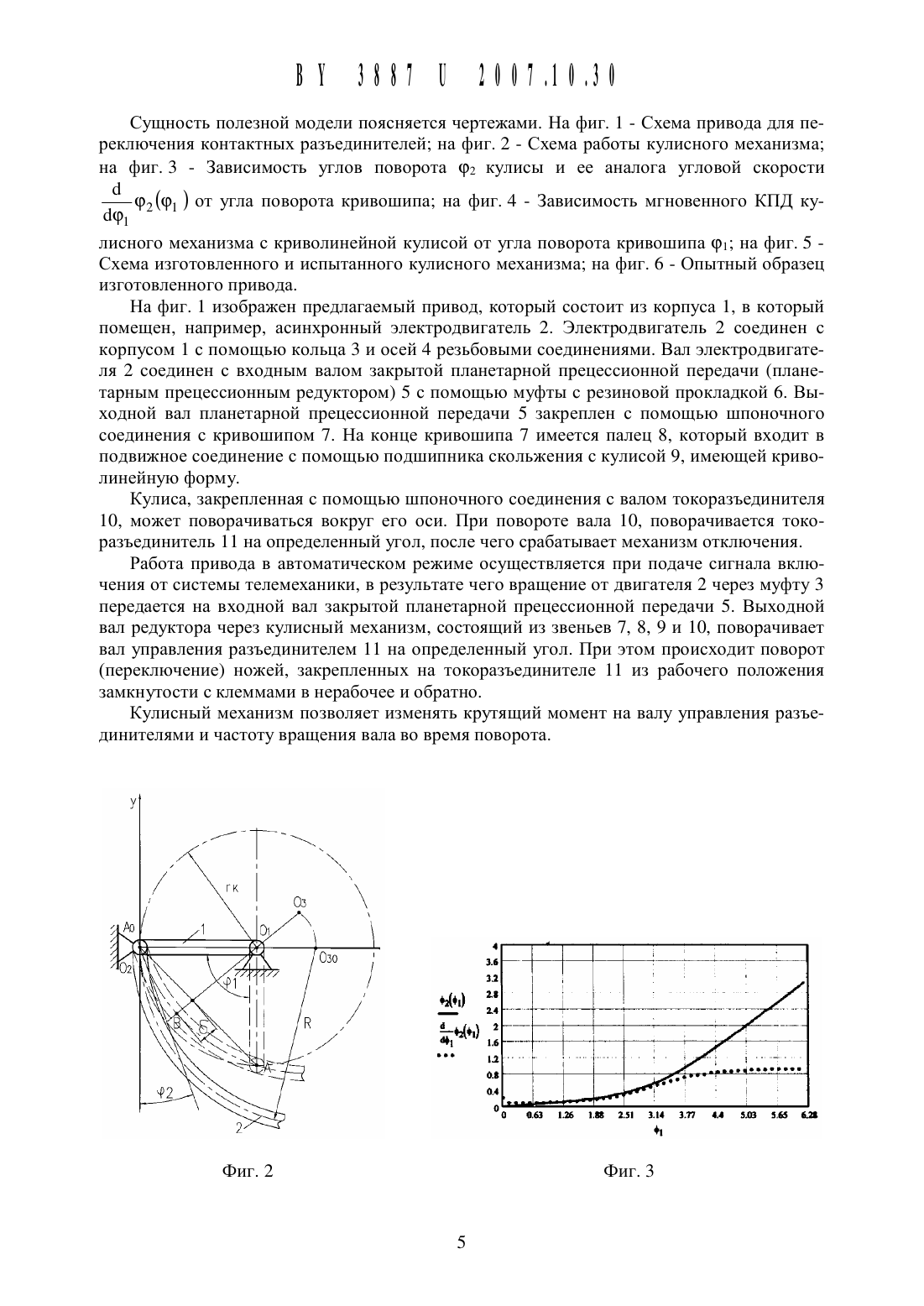
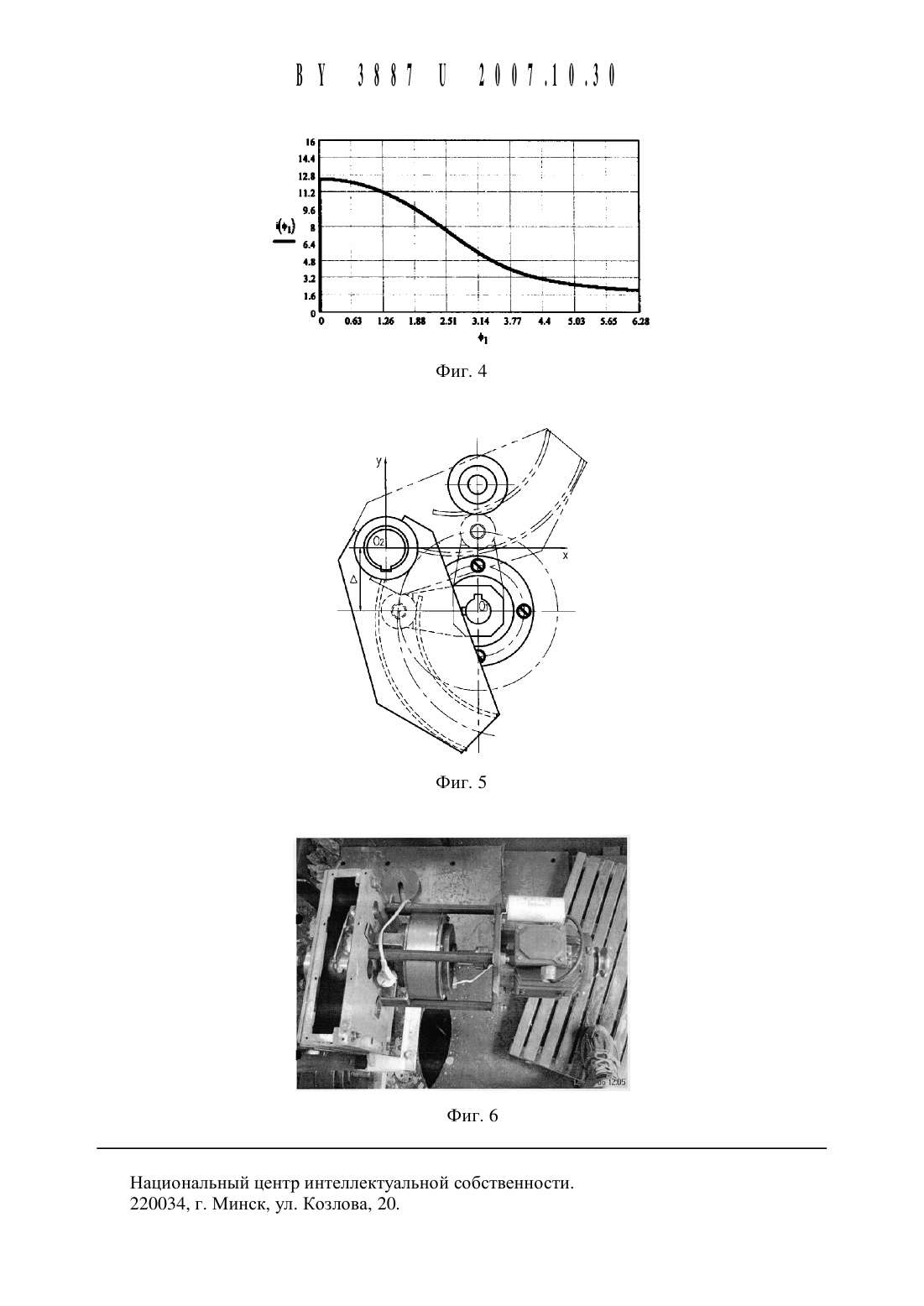
1. Дмитриевский Г.В. Эксплуатация устройств дистанционного управления разъединителями / Г.В. Дмитриевский, В.В. Курганов, М.А. Турлянский. - М. Транспорт, 1974. 64 с ил., С. 19-20, 23-24.Полезная модель относится К области электротехники, а именно К двигательным приводам высоковольтных аппаратов, в частности для управления разъединителями контактной сети электрифицированных железных дорог.Известен универсальный моторный привод УМП 11, содержащий коллекторный электродвигатель постоянного тока, соединенный с помощью муфты с двухступенчатым редуктором, первая ступень которого цилиндрическая зубчатая, а вторая - червячная 1.Однако в конструкции данного привода используются дорогостоящие материалы(бронза), дорогостоящий коллекторный двигатель постоянного тока, который имеет недостаточный пусковой момент для передачи требуемой нагрузки.Наиболее близким аналогом является винтовой двигательный привод, содержащий корпус, двигатель, связанный с винтом винтовой пары кулисный механизм, ползун которого установлен с возможностью взаимодействия с направляющими внутри корпуса и вь 1 полнен с внутренней полостью, в которой размещена гайка упомянутой винтовой пары, а снаружи с противоположных сторон закреплены два стержня, каждый из которых состоит из двух частей различного диаметра 2.Однако данный привод имеет сложную конструкцию, трудность сборки-разборки, ограниченные возможности регулирования крутящего момента и частоты вращения вь 1 ходного вала из-за прямолинейной формы кулисы.Задачей полезной модели является упрощение конструкции привода, снижение себестоимости его изготовления, увеличение нагрузочной способности из-за расширения возможностей регулирования значения крутящего момента и частоты вращения выходного вала привода (вала управления токоразъединителями).Поставленная задача достигается тем, что в двигательном приводе, содержащем корпус, двигатель, кулисный механизм, согласно полезной модели кулисный механизм соединен с двигателем посредством муфты и планетарного прецессионного редуктора, а кулиса состоит из двух направляющих дугообразной формы, непосредственно связанных с выходным валом привода. Электродвигатель может быть применен асинхронный. Муфта может быть снабжена резиновой прокладкой.Рассмотрим схему кулисного механизма, изображенного на фиг. 2. Начало координат свяжем с точкой 02, вокруг которой осуществляется поворот токоразъединителя. 0 сь 02 х направим вправо, ось 02 у направим вверх. Вокруг точки 01 (вокруг оси, проходящей через эту точку, перпендикулярной плоскости чертежа) вращается кривошип 01 А с длиной,равной г 1 (01 А г 1). Его вращение характеризуется углом поворота (р 1 отсчитываемым от оси ох против хода часовой стрелки. Криволинейная кулиса с радиусом К (Кг 1) может вращаться вокруг точки 02, ее поворот характеризуется углом р 2. Этот угол будем отсчитывать между осью ординат 02 у и касательной, проведенной в точке 02 к криволинейной кулисе с радиусом К. Для определенности примем положение центров вращения кривошипа и кулисы (точек 01 и 02) на оси 02 х. В начальный момент времени точки 02 и А совпадают. Начальное положение точки А обозначим АО.При вращении кривошипа точка А занимает последовательно положения А 1, А 2, А 3 и т.д. Рассмотрим положение механизма, когда кривая занимает вертикальное нижнее положение. На фиг. 2 это положение показано штриховыми линиями. При этом длина хорды 1 02 А определитсяПОЛОЖСНИС КРИВОЛИНСЙНОЙ КУЛИСЫ определяется В ТОМ ЧИСЛС И ОТрСЗКОМ 5, КОТОРЫЙ ОПРДВЛЯСТСЯ ИСХОДЯ ИЗ квадратного уравнения. Само уравнение ПОЛУЧСНО ИЗ ИЗВССТНОЙ ИЗгеометрии формулы, определяющей равенство произведений отрезков двух пресекающихся хорд окружности.Проведя через Центр хорды 02 А отрезок В 03 К, определим положение точки 03, которая является Центром кривизны кулисы. На фиг. 2 в начальный момент времени эта точка обозначена 03. Длина отрезка 0103 изменяется во времени, является функцией угла по ворота кривошипа 1 (р 1 И ОПРСДВЛЯСТСЯ ПО СЛСДУЮЩИМ ЗЗВИСИМОСТЯМЕКоординаты Центра 03 кривизны кулисы в каждый момент времени определятся по формуламУравнение касательной к окружности с радиусом К, проходящей через точку 02, определится из выражения2 х-х 3 у-у 3 К. (9) После преобразований уравнения (9) получим выражения для определения угла поворота (рДанные уравнения были исследованы с помощью программного пакета Машсаб. Зависимость изменения угла р 2 от изменения угла р 1 графически представлена как функция р 2(р 1) на фиг. 3. Также на фиг. 3 представлено изменение производной угла поворота (р 2(1 от угла ф р 2(р 1 Это выражение является аналогом угловои скорости Кулисы и ха дР 1рактеризует скорость поворота этого звена.Если рассматривать постоянный режим работы, т.е. угловую скорость кривошипа считать постоянной (он соп 5), то передаточное мгновенное отношение механизма, определяемое как отношение угловой скорости (91 входного звена (кривошипа) к угловой скоро Р 1СТИ 032 ВЫХОДНОГО ЗВСНЗ (КУЛИСЫ) МОЖНО ЗЗМСНИТЬ ОТНОШСНИСМ УГЛОВ Т. Передаточное Р 2 отношение определяли по формулеГрафик зависимости ( 1) приведен на фиг. 4. При построении графиков на фиг. 3 и 4 использовались следующие Числовые значения длины кривошипа и радиуса кривизны кулисы соответственно г 1 57 мм, К 68 мм.Как следует из анализа графиков, представленных на фиг. 3 и на фиг. 4, криволинейная форма кулисы дает возможность в начальный момент разогнаться электродвигателю до номинальных оборотов с малой нагрузкой. На фиг. 3 видно, что скорость (аналог скорости) будет постепенно увеличиваться от минимального значения, которое и требуется в начальный момент, а из графика на фиг. (4) видно, что мгновенное передаточное отношение, в начальный момент больше десяти, а это означает, что на валу двигателя в этот момент будет незначительная нагрузка, так как крутящий момент на валу управления токоразъединителями (на выходном валу) М и требуемый момент на валу двигателя М 1 связаны следующей зависимостьюМ 1 ( 14) 111 ппп где 1., - передаточное число кулисного механизма 111,1 - передаточное число закрытой планетарной прецессионной передачи, 11 - КПД привода.Когда разъединение токоразъединителей и клемм произошло, значительных крутящих моментов не требуется (на фиг. 4 мгновенный КПД уменьшается), а скорость увеличивается (фиг. 3), что необходимо для скорейшего прерывания электрической дуги возникающей сразу после разрыва контакта и препятствующей продолжению движения токоразъединителей. Данное решение и позволяет применять как коллекторный, так и более дешевый и надежный асинхронный двигатель.В предлагаемом приводе может использоваться электродвигатель с частотой вращения в диапазоне 750-1500 об/мин. Планетарный преЦессионнь 1 й редуктор имеет передаточное число 63, передаточное число кулисного механизма в начальный момент времени около 12, значит общее передаточное число привода - около 754, что значительно повь 1 шает значение передаваемого крутящего момента от двигателя. Муфта, соединяющая вал электродвигателя и вал планетарного преЦессионного редуктора, снабжена резиновой прокладкой, что позволяет изолировать привод от вала электродвигателя.На фиг. 5 изображен кулисный механизм, состоящий из кривошипа и кулисы, изготовленный и испытанный в лаборатории Белорусско-Российского университета. При этом в отличие от рассмотренной упрощенной математической модели, в изготовленном образЦе ось вращения кривошипа смещена относительно оси вращения кулисы на величину А. Это, как показывают эксперименты, не изменяет принципа работы привода, а лишь корректирует его некоторые выходные параметры.Был создан натурный образец привода (фиг. 6) и проведены его лабораторные испь 1 тания, доказавшие справедливость математических расчетов.Сущность Полезной модели поясняется чертежами. На фиг. 1 - Схема привода для переключения контактных разъединителей на фиг. 2 - Схема работы кулисного механизмана фиг. 3 - Зависимость углов поворота р 2 кулисы и ее аналога угловой скорости Ьфжф ) от угла поворота кривошипа на фиг. 4 - Зависимость мгновенного КПД кудР 1лисного Механизма с криволинейной кулисой от угла поворота кривошипа (р 1 на фиг. 5 Схема изготовленного и испытанного кулисного механизма на фиг. 6 - Опытный образец изготовленного привода.На фиг. 1 изображен предлагаемый привод, который состоит из корпуса 1, в который помещен, например, асинхронный электродвигатель 2. Электродвигатель 2 соединен с корпусом 1 с помощью кольца 3 и осей 4 резьбовыми соединениями. Вал электродвигателя 2 соединен с входным валом закрытой планетарной прецессионной передачи (планетарным прецессионным редуктором) 5 с помощью муфты с резиновой прокладкой 6. Вь 1 ходной вал планетарной прецессионной передачи 5 закреплен с помощью шпоночного соединения с кривошипом 7. На конце кривошипа 7 имеется палец 8, который входит в подвижное соединение с помощью подшипника скольжения с кулисой 9, имеющей криволинейную форму.Кулиса, закрепленная с помощью шпоночного соединения с валом токоразъединителя 10, может поворачиваться вокруг его оси. При повороте вала 10, поворачивается токоразъединитель 11 на определенный угол, после чего срабатывает механизм отключения.Работа привода в автоматическом режиме осуществляется при подаче сигнала включения от системы телемеханики, в результате чего вращение от двигателя 2 через муфту 3 передается на входной вал закрытой планетарной прецессионной передачи 5. Выходной вал редуктора через кулисный механизм, состоящий из звеньев 7, 8, 9 и 10, поворачивает вал управления разъединителем 11 на определенный угол. При этом происходит поворот(переключение) ножей, закрепленных на токоразъединителе 11 из рабочего положения замкнутости с клеммами в нерабочее и обратно.Кулисный механизм позволяет изменять крутящий момент на валу управления разъединителями и частоту вращения вала во время поворота.
МПК / Метки
МПК: F16H 25/00
Метки: двигательный, привод
Код ссылки
<a href="https://by.patents.su/6-u3887-dvigatelnyjj-privod.html" rel="bookmark" title="База патентов Беларуси">Двигательный привод</a>
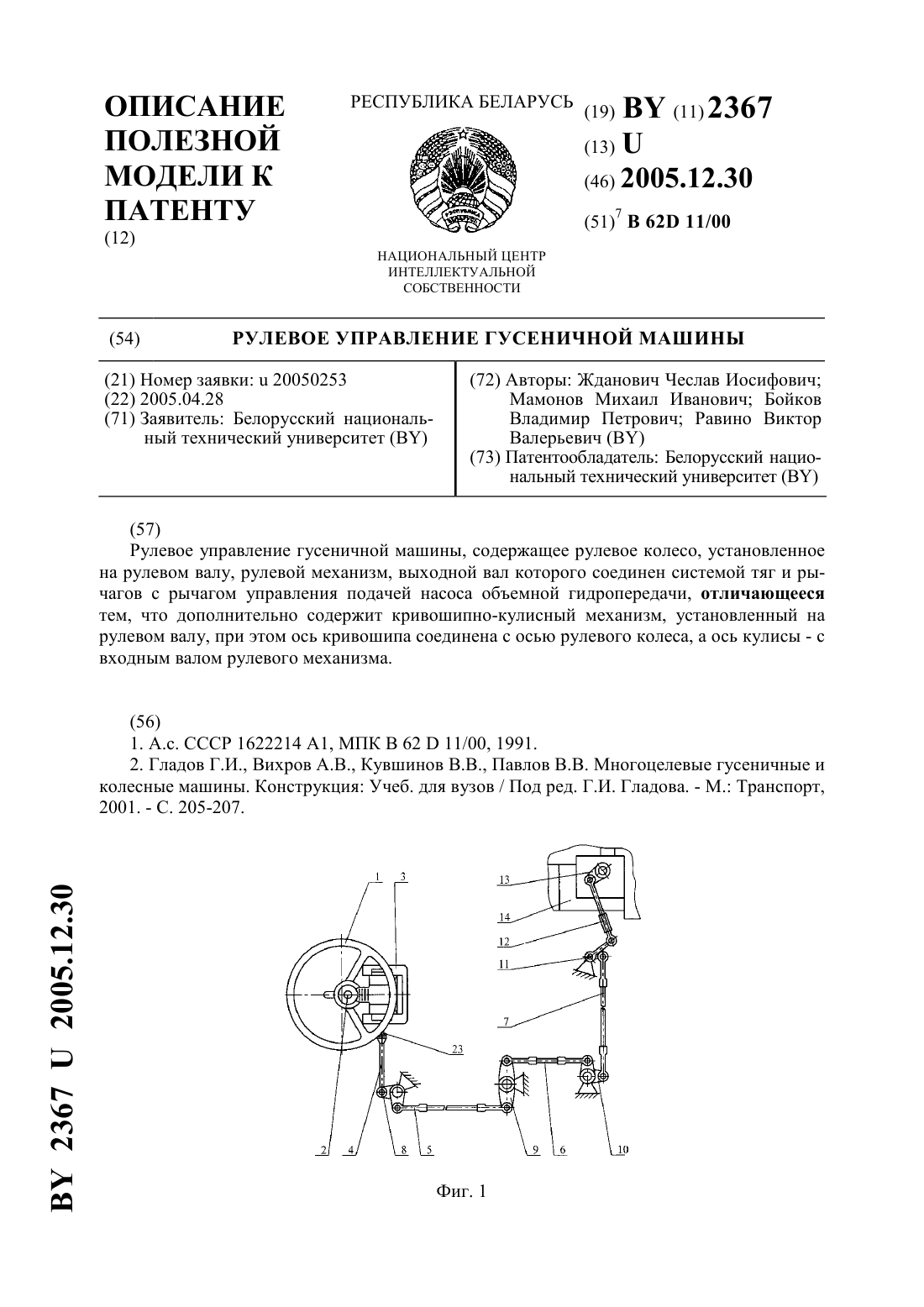
Рулевое управление гусеничной машины
Номер патента: U 2367
Опубликовано: 30.12.2005
Авторы: Равино Виктор Валерьевич, Бойков Владимир Петрович, Мамонов Михаил Иванович, Жданович Чеслав Иосифович
МПК: B62D 11/00
Метки: управление, гусеничной, рулевое, машины
Текст:
...большую величину, чем на больших углах поворота. Введение такой нелинейности в систему управления позволяет повысить быстродействие системы управления на больших радиусах поворота и обеспечить высокую точность на малых радиусах поворота. На фиг. 1 изображена конструкция рулевого управления гусеничной машины. На фиг. 2 изображено конструктивное исполнение механизма нелинейного регулирования. На фиг. 3 изображена расчетная схема механизма...
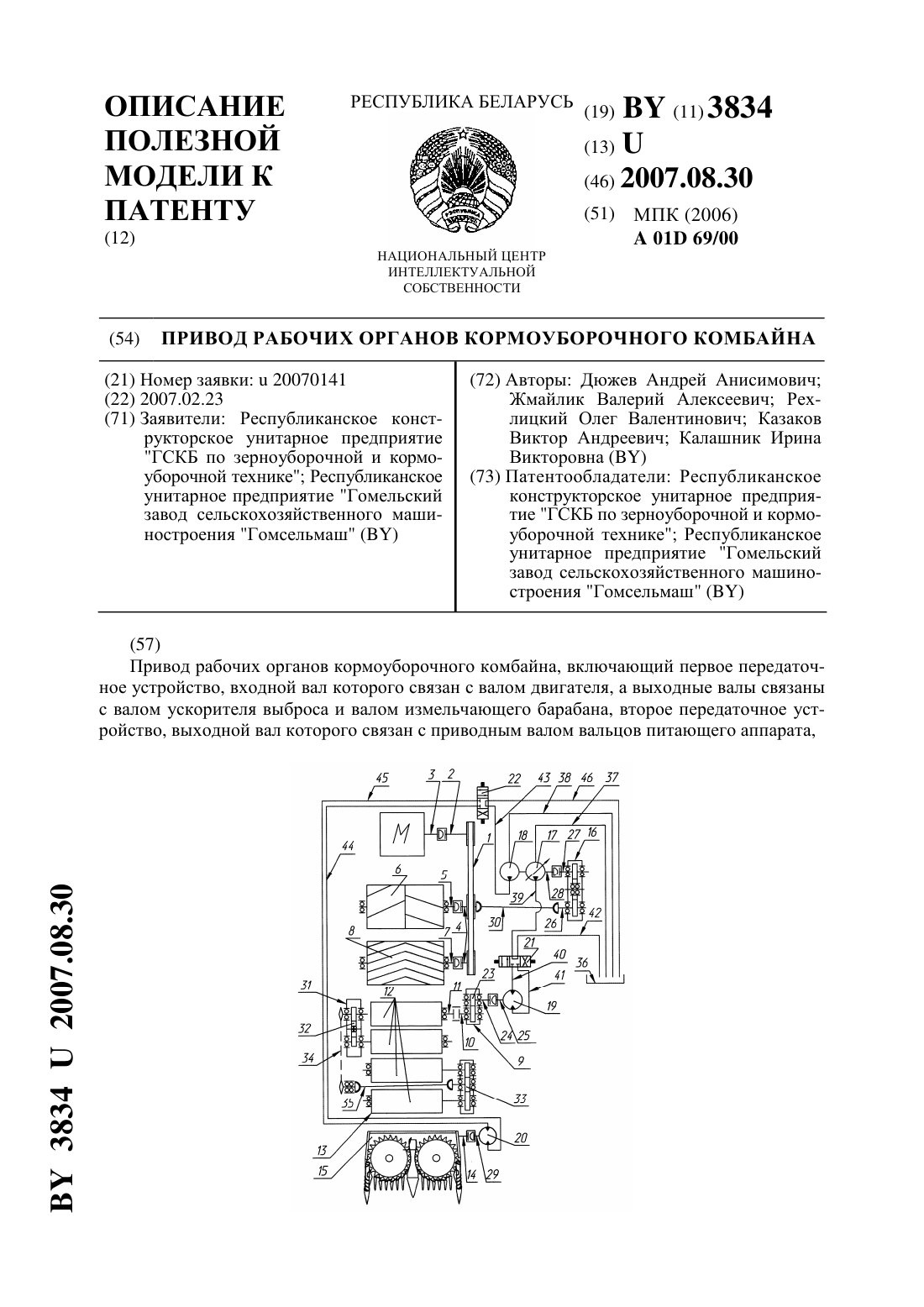
Привод рабочих органов кормоуборочного комбайна
Номер патента: U 3834
Опубликовано: 30.08.2007
Авторы: Калашник Ирина Викторовна, Жмайлик Валерий Алексеевич, Дюжев Андрей Анисимович, Казаков Виктор Андреевич, Рехлицкий Олег Валентинович
МПК: A01D 69/00
Метки: привод, кормоуборочного, комбайна, органов, рабочих
Текст:
...выходной вал связан с валами гидронасосов, вал второго гидромотора связан с приводным валом адаптера, при этом первый гидронасос выполнен регулируемым. Совокупность отличительных признаков заявляемого технического решения позволяет получить ранее неизвестный эффект, выражающийся в том, что снабжение привода рабочих органов кормоуборочного комбайна дополнительным передаточным устройством,двумя гидронасосами и двумя гидромоторами,...
Двухдвигательный привод
Номер патента: U 77
Опубликовано: 30.12.1999
Авторы: Латыпова Елена Юрьевна, Цумарев Юрий Алексеевич, Рогачевский Сергей Николаевич
МПК: F16H 3/72
Метки: двухдвигательный, привод
Текст:
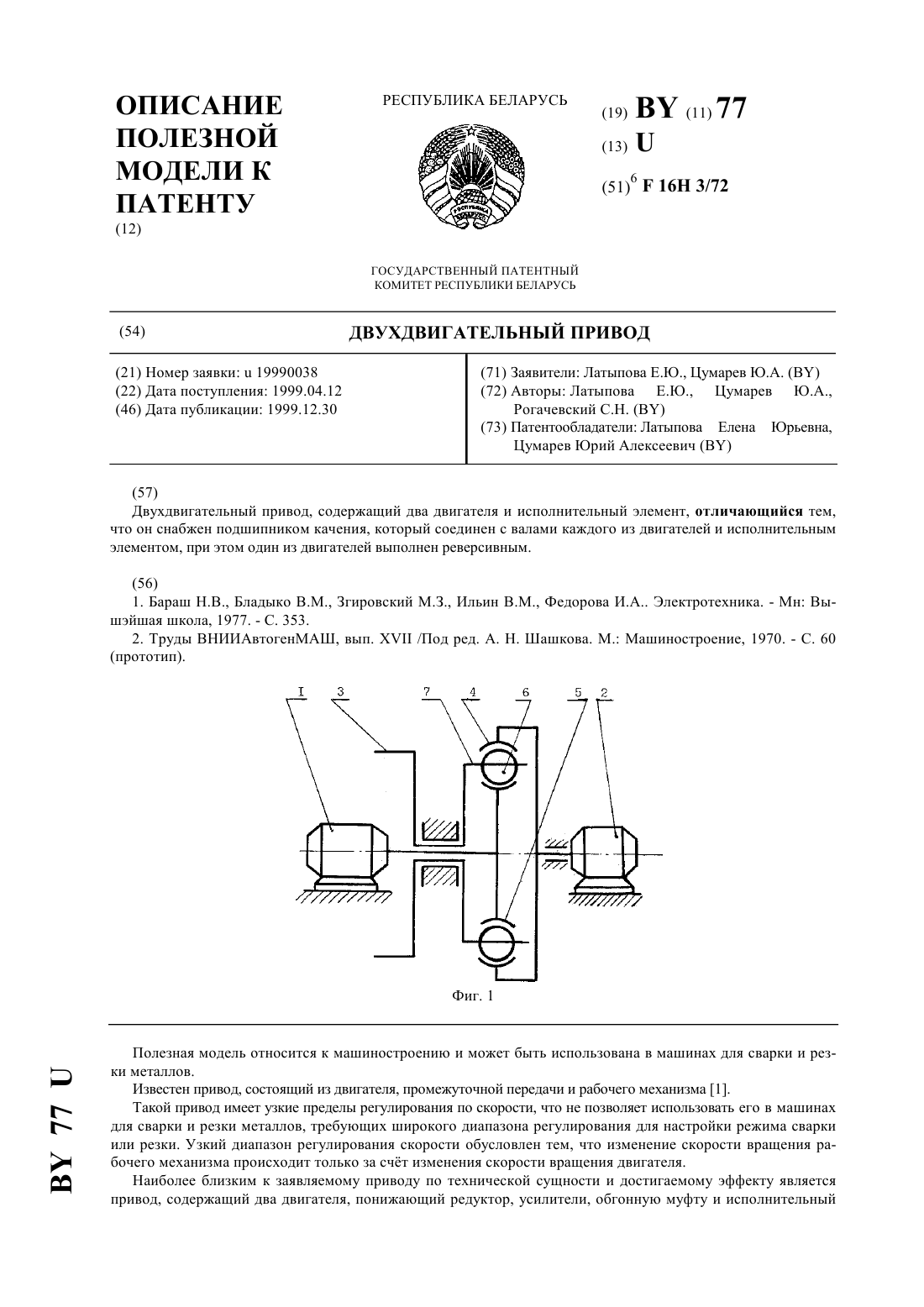
...состоит из двигателей 1 и 2, исполнительного элемента 3 и подшипника качения, включающего в себя наружное кольцо 4, внутреннее кольцо 5, тела качения 6 и сепаратор 7. Наружное кольцо 4, внутреннее кольцо 5 и сепаратор 7 установлены соосно друг другу, а также соосно по отношению к каждому из двигателей 1 и 2. Таким образом, подшипник качения, состоящий из наружного кольца 4, внутреннего кольца 5, тел качения 6 и сепаратора 7, соединен с...
Привод механизма завинчивания крышек прямоточной укупорочной машины
Номер патента: U 451
Опубликовано: 30.03.2002
Авторы: Никуленко Юрий Александрович, Лабузько Валерий Артемович
Метки: механизма, прямоточной, завинчивания, крышек, привод, машины, укупорочной
Текст:
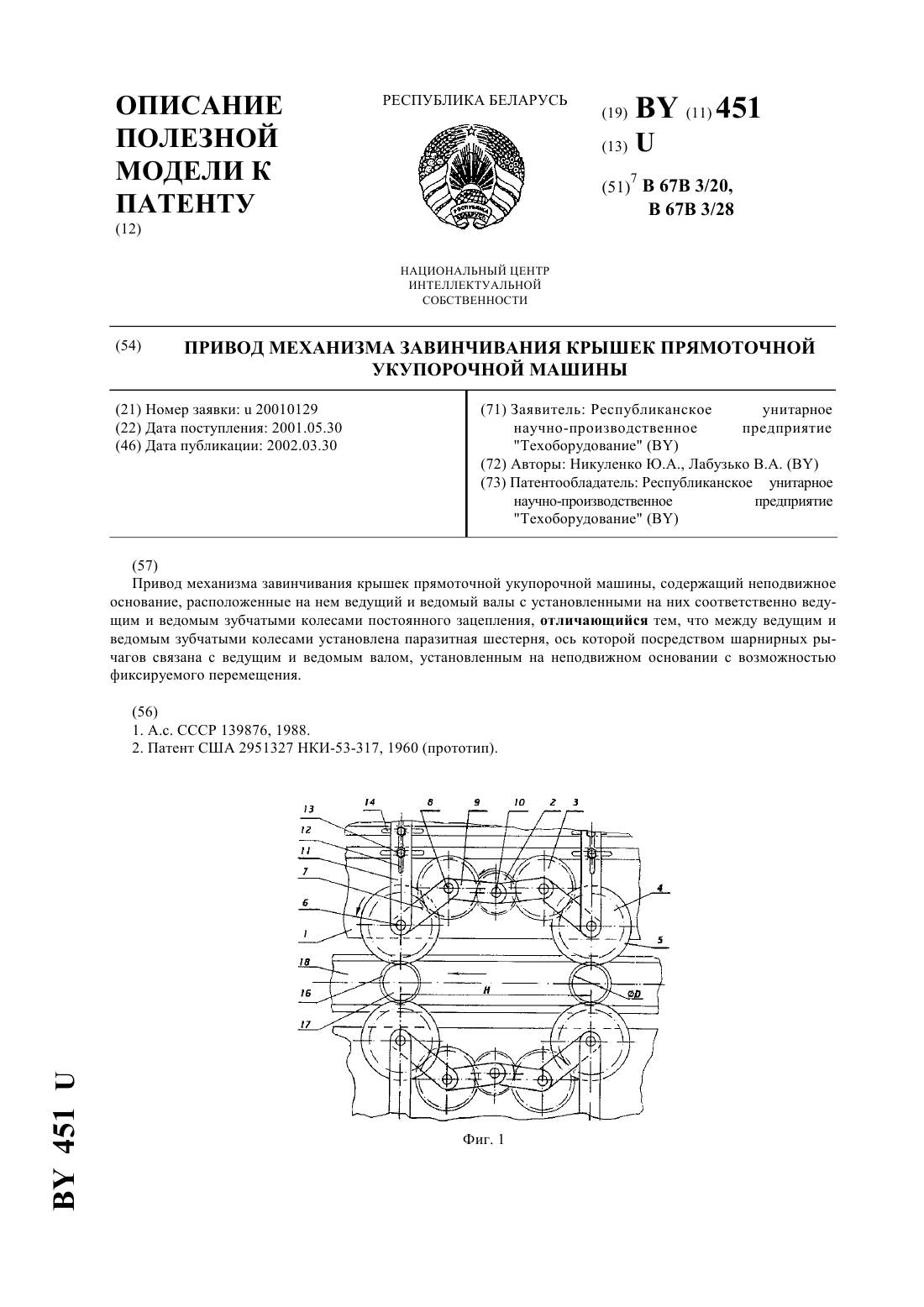
...возможностей привода вращения крышек прямоточной укупорочной машины. Поставленная задача решается путем установки между ведущим и ведомым зубчатыми колесами паразитной шестерни, соединенной посредством двух шарнирных рычагов с ведущим и ведомым валами с обеспечением постоянного зубчатого зацепления. При этом ведомый вал смонтирован на неподвижном основании с возможностью перемещения и жестко фиксируемого рабочего положения....
Привод

Номер патента: U 56
Опубликовано: 30.12.1999
Авторы: Латыпова Елена Юрьевна, Цумарев Юрий Алексеевич
МПК: F16H 3/72
Метки: привод
Текст:
...по скорости обеспечиваются без использования обгонных муфт и усилителей. Тем самым упрощается конструкция привода. Кроме того, работа привода во всм диапазоне скоростей происходит без отключения двигателя, в результате чего улучшается использование мощности двигателей. Сущность полезной модели поясняется чертежом. На фиг. 1 изображена схема привода, на фиг. 2 - распределение скоростей при его работе. Привод состоит из двигателей 1 и 2,...
Предыдущий патент: Регулирующее устройство трубопроводной арматуры
Следующий патент: Композиционная уплотнительная прокладка
Случайный патент: Устройство для селективной выемки пласта полезного ископаемого